| 机械工程、能源工程 |
|

|
|
|
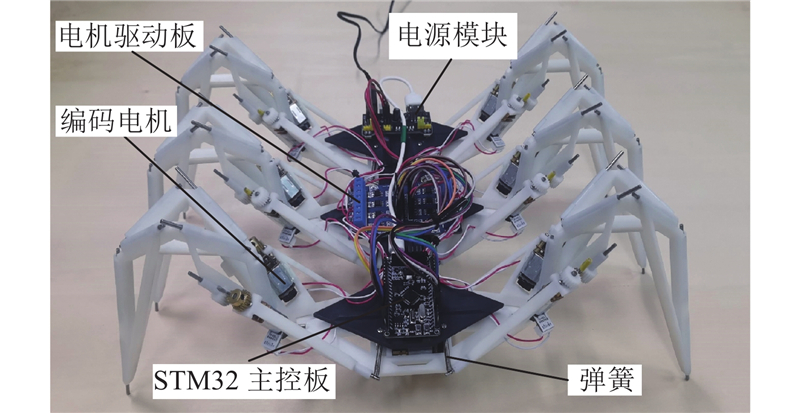
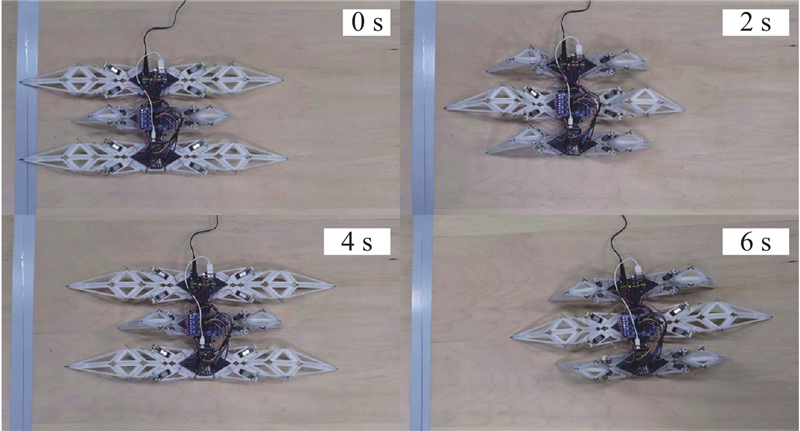
| 仿生六足折纸机器人结构设计与运动分析 |
曹东兴1,2( ),贾艳超2,3,郭翔鹰1,2,毛佳佳1,2 ),贾艳超2,3,郭翔鹰1,2,毛佳佳1,2 |
1. 北京工业大学 数学统计学与力学学院,北京 100124
2. 北京工业大学 机械结构非线性振动与强度北京市重点实验室,北京 100124
3. 北京工业大学 机械与能源工程学院,北京 100124 |
|
| Structure design and motion analysis of bionic hexapod origami robot |
| Dongxing CAO1,2(),Yanchao JIA2,3,Xiangying GUO1,2,Jiajia MAO1,2 |
1. School of Mathematics Statistics and Mechanic, Beijing University of Technology, Beijing 100124, China
2. Beijing Key Laboratory of Nonlinear Vibrations and Strength of Mechanical Structures, Beijing University of Technology, Beijing 100124, China
3. School of Mechanical and Energy Engineering, Beijing University of Technology, Beijing 100124, China |
引用本文:
曹东兴,贾艳超,郭翔鹰,毛佳佳. 仿生六足折纸机器人结构设计与运动分析[J]. 浙江大学学报(工学版), 2024, 58(8): 1543-1555.
Dongxing CAO,Yanchao JIA,Xiangying GUO,Jiajia MAO. Structure design and motion analysis of bionic hexapod origami robot. Journal of ZheJiang University (Engineering Science), 2024, 58(8): 1543-1555.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2024.08.002
或
https://www.zjujournals.com/eng/CN/Y2024/V58/I8/1543
|
| 1 |
CHEN Y, FENG H, MA J, et al Symmetric waterbomb origami[J]. Proceedings: Mathematical, Physical and Engineering Sciences, 2016, 472 (2190): 20150846
|
| 2 |
李笑, 李明 折纸及其折痕设计研究综述[J]. 力学学报, 2018, 50 (3): 467- 476
LI Xiao, LI Ming A review of origami and its crease design[J]. Chinese Journal of Theoretical and Applied Mechanics, 2018, 50 (3): 467- 476
|
| 3 |
方虹斌, 吴海平, 刘作林, 等 折纸结构和折纸超材料动力学研究进展[J]. 力学学报, 2022, 54 (1): 1- 38
FANG Hongbin, WU Haiping, LIU Zuolin, et al Advances in the dynamics of origami structures and origami metamaterials[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54 (1): 1- 38
|
| 4 |
陈焱, 顾元庆 折纸运动学综述[J]. 力学进展, 2023, 53 (1): 154- 197
CHEN Yan, GU Yuanqing Review on origami kinematics[J]. Advances in Mechanics, 2023, 53 (1): 154- 197
|
| 5 |
DAI J S, JONES J R Mobility in metamorphic mechanisms of foldable/erectable kinds[J]. Journal of Mechanical Design, 1999, 121 (3): 375- 382
doi: 10.1115/1.2829470
|
| 6 |
DAI J S, JONES J R Kinematics and mobility analysis of carton folds in packing manipulation based on the mechanism equivalent[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2002, 216 (10): 959- 970
doi: 10.1243/095440602760400931
|
| 7 |
DAI J S, JONES J R Matrix representation of topological changes in metamorphic mechanisms[J]. Journal of Mechanical Design, 2005, 127 (4): 837- 840
doi: 10.1115/1.1866159
|
| 8 |
冯慧娟, 马家耀, 陈焱 广义Waterbomb折纸管的刚性折叠运动特性[J]. 机械工程学报, 2020, 56 (19): 143- 159
FENG Huijuan, MA Jiayao, CHEN Yan Rigid folding of generalized Waterbomb origami tubes[J]. Journal of Mechanical Engineering, 2020, 56 (19): 143- 159
doi: 10.3901/JME.2020.19.143
|
| 9 |
WANG G, WANG J, YAO Y, et al Research on programmable spatial capture mechanism and its motion characteristics based on origami principle[J]. Mechanism and Machine Theory, 2023, 181: 105179
doi: 10.1016/j.mechmachtheory.2022.105179
|
| 10 |
FELTON S, TOLLEY M, DEMAINE E, et al A method for building self-folding machines[J]. Science, 2014, 345 (6197): 644- 646
doi: 10.1126/science.1252610
|
| 11 |
KAMRAVA S, MOUSANEZHAD D, FELTON S M, et al Programmable origami strings[J]. Advanced Materials Technologies, 2018, 3 (3): 1700276
doi: 10.1002/admt.201700276
|
| 12 |
RUS D, SUNG C Spotlight on origami robots[J]. Science Robotics, 2018, 3 (15): eaat0938
doi: 10.1126/scirobotics.aat0938
|
| 13 |
冯慧娟, 杨名远, 姚国强, 等 折纸机器人[J]. 中国科学: 技术科学, 2018, 48 (12): 1259- 1274
FENG Huijuan, YANG Mingyuan, YAO Guoqiang, et al Origami robots[J]. Scientia Sinica Technologica, 2018, 48 (12): 1259- 1274
doi: 10.1360/N092018-00213
|
| 14 |
FAAL S G, CHEN F, TAO W, et al Hierarchical kinematic design of foldable hexapedal locomotion platforms[J]. Journal of Mechanisms and Robotics, 2016, 8 (1): 011005
doi: 10.1115/1.4030468
|
| 15 |
江新阳, 许勇, 王艳, 等 基于折纸机构设计的新型行走机器人[J]. 机械传动, 2021, 45 (5): 66- 74
JIANG Xinyang, XU Yong, WANG Yan, et al Novel walking robot based on the design of origami mechanism[J]. Journal of Mechanical Transmission, 2021, 45 (5): 66- 74
|
| 16 |
GU Y, WEI G, CHEN Y Thick-panel origami cube[J]. Mechanism and Machine Theory, 2021, 164: 104411
doi: 10.1016/j.mechmachtheory.2021.104411
|
| 17 |
PENG R, CHIRIKJIAN G S A methodology for thick-panel origami pattern design[J]. Mechanism and Machine Theory, 2023, 189: 105423
doi: 10.1016/j.mechmachtheory.2023.105423
|
| 18 |
EDMONDSON B, LANG R, MORGAN M, et al Thick rigidly foldable structures realized by an offset panel technique[J]. Origami6: I Mathematics, 2015, 1: 149- 161
|
| 19 |
CHEN Y, PENG R, YOU Z Origami of thick panels[J]. Science, 2015, 349: 396- 400
doi: 10.1126/science.aab2870
|
| 20 |
徐小云, 颜国正, 丁国清 微型六足仿生机器人及其三角步态的研究[J]. 光学精密工程, 2002, 10 (4): 392- 396
XU Xiaoyun, YAN Guozheng, DING Guoqing Research on miniature hexapod bio-robot and its tri pod gait[J]. Optics and Precision Engineering, 2002, 10 (4): 392- 396
|
| 21 |
刘连蕊, 张泽, 高建华 六足机器人横向行走步态研究[J]. 浙江理工大学学报, 2011, 28 (2): 225- 229
LIU Lianrui, ZHANG Ze, GAO Jianhua Signal processing method of the laser heterodyne interferometry based on DSP[J]. Journal of Zhejiang SciTech University, 2011, 28 (2): 225- 229
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|