| 能源工程、机械工程 |
|


|
|
|
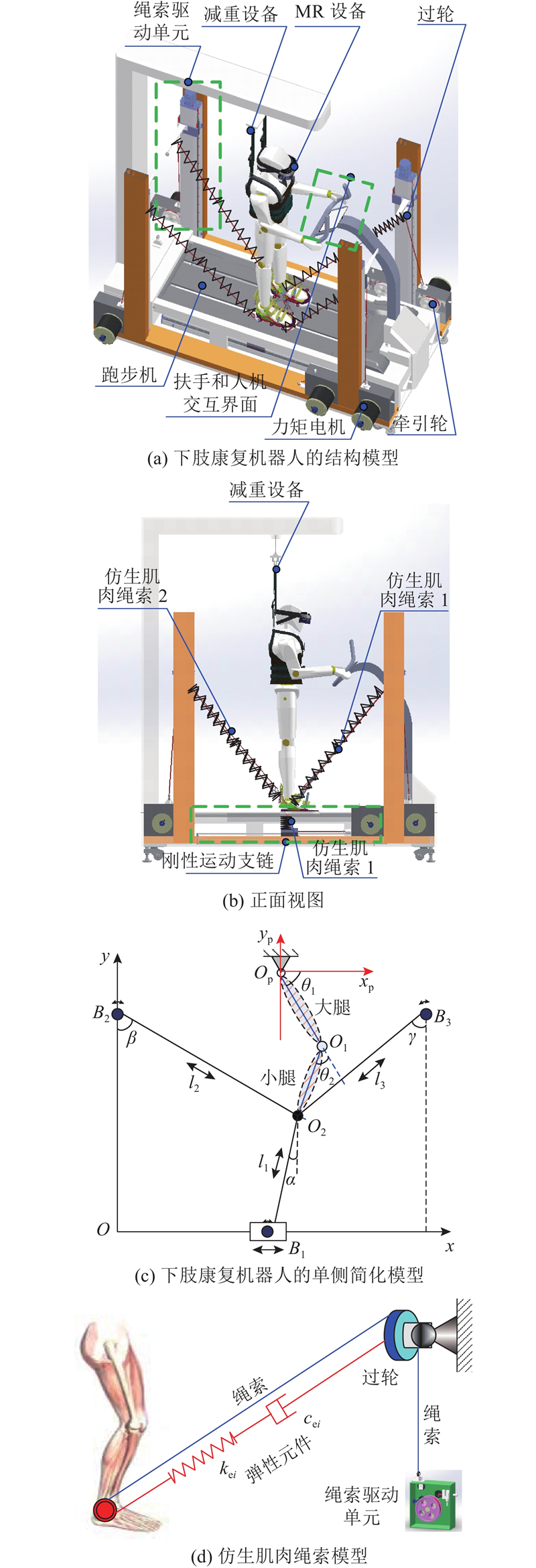
| 仿肌肉绳索驱动下肢康复机器人系统使用安全性评价 |
王砚麟1,2( ),王克义1,*(),王奎成1,莫宗骏1,王璐莹1 ),王克义1,*(),王奎成1,莫宗骏1,王璐莹1 |
1. 哈尔滨工程大学 机电工程学院, 黑龙江 哈尔滨 150001
2. 兰州理工大学 机电工程学院, 甘肃 兰州 730050 |
|
| Safety evaluation of bionic-muscle cable-driven lower limb rehabilitation robot system |
| Yan-lin WANG1,2(),Ke-yi WANG1,*(),Kui-cheng WANG1,Zong-jun MO1,Lu-ying WANG1 |
1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China
2. School of Mechanical and Electrical Engineering, Lanzhou University of Technology, Lanzhou 730050, China |
引用本文:
王砚麟,王克义,王奎成,莫宗骏,王璐莹. 仿肌肉绳索驱动下肢康复机器人系统使用安全性评价[J]. 浙江大学学报(工学版), 2022, 56(1): 168-177.
Yan-lin WANG,Ke-yi WANG,Kui-cheng WANG,Zong-jun MO,Lu-ying WANG. Safety evaluation of bionic-muscle cable-driven lower limb rehabilitation robot system. Journal of ZheJiang University (Engineering Science), 2022, 56(1): 168-177.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.01.019
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I1/168
|
| 1 |
United Nations. 2019 revision of world population prospects [R]. New York: Department of Economic and Social Affairs, United Nations, 2019.
|
| 2 |
WANG Y L, WANG K Y, ZHAO W Y, et al Effects of single crouch walking gaits on fatigue damages of lower extremity main muscles[J]. Journal of Mechanics in Medicine and Biology, 2019, 19 (6): 1940046
|
| 3 |
DE-LA-TORRE R, OÑA E D, BALAGUER C, et al Robot-aided systems for improving the assessment of upper limb spasticity: a systematic review[J]. Sensors, 2020, 20 (18): 5251
doi: 10.3390/s20185251
|
| 4 |
BASTERIS A, NIJENHUIS S M, STIENEN A H A Training modalities in robot-mediated upper limb rehabilitation in stroke: a framework for classification based on a systematic review[J]. Journal of Neuroengineering and Rehabilitation, 2014, 11: 111- 126
doi: 10.1186/1743-0003-11-111
|
| 5 |
WANG Y L, WANG K Y, ZHANG Z X, et al Design, comprehensive evaluation, and experimental study of a cable-driven parallel robot for lower limb rehabilitation[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2020, 42 (7): 371
doi: 10.1007/s40430-020-02443-x
|
| 6 |
WANG Y L, WANG K Y, WANG W L, et al Appraise and analysis of dynamical stability of cable-driven lower limb rehabilitation training robot[J]. Journal of Mechanical Science and Technology, 2019, 33 (11): 5461- 5472
doi: 10.1007/s12206-019-1040-4
|
| 7 |
CUI X, CHEN W H, JIN X, et al Design of a 7-DOF cable-driven arm exoskeleton (CAREX-7) and a controller for dexterous motion training or assistance[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22 (1): 161- 172
doi: 10.1109/TMECH.2016.2618888
|
| 8 |
ALIMAN N, RAMLI R, HARIS S M Design and development of lower limb exoskeleton: a survey[J]. Robotics and Autonomous Systems, 2017, 95: 102- 116
doi: 10.1016/j.robot.2017.05.013
|
| 9 |
AMIRI M S, RAMLI R, TARMIZI M A A, et al Simulation and control of a six degree of freedom lower limb exoskeleton[J]. Journal Kejuruteraan, 2020, 32 (2): 197- 204
|
| 10 |
ARMANNSDOTTIR A L, BECKERLE P, MORENO J C, et al Assessing the involvement of users during development of lower limb wearable robotic exoskeletons: a survey study[J]. Human Factors, 2020, 62 (3): 351- 364
doi: 10.1177/0018720819883500
|
| 11 |
KINO H, YOSHITAKE T, WADA R, et al 3-DOF planar parallel-wire driven robot with an active balancer and its model-based adaptive control[J]. Advanced Robotics, 2018, 32 (14): 766- 777
doi: 10.1080/01691864.2018.1493397
|
| 12 |
QIAN S, ZI B, WANG W, et al A review on cable-driven parallel robots[J]. Chinese Journal of Mechanical Engineering, 2018, 31 (1): 66- 77
doi: 10.1186/s10033-018-0267-9
|
| 13 |
ZOU Y P, WANG N, WANG X Q, et al Design and experimental research of movable cable-driven lower limb rehabilitation robot[J]. IEEE Access, 2019, 7: 2315- 2326
doi: 10.1109/ACCESS.2018.2887233
|
| 14 |
ZOU Y. P, LIU K, WANG N, et al. Design and optimization of movable cable-driven lower-limb rehabilitation robot [C]// 3rd International Conference on Advanced Robotics and Mechatronics. Singapore: IEEE, 2018: 714-719.
|
| 15 |
ZI B, YIN G C, LI Y, et al. Kinematic performance analysis of a hybrid-driven waist rehabilitation robot [C]// 2nd International Conference on Mechatronics and Robotics Engineering. Nice: Springer, 2016.
|
| 16 |
SCALERA L, GALLINA P, SERIANI S, et al Cable-based robotic crane (CBRC): design and implementation of overhead traveling cranes based on variable radius drums[J]. IEEE Transactions on Robotics, 2018, 34 (2): 474- 485
doi: 10.1109/TRO.2018.2791593
|
| 17 |
SERIANI S, GALLINA P Variable radius drum mechanisms[J]. Journal of Mechanisms and Robotics-Transactions of the ASME, 2016, 8 (2): 021016
doi: 10.1115/1.4031951
|
| 18 |
WANG Y L, WANG K Y, ZHANG Z X, et al Analysis of dynamical stability of rigid-flexible hybrid-driven lower limb rehabilitation robot[J]. Journal of Mechanical Science and Technology, 2020, 34 (4): 1735- 1748
doi: 10.1007/s12206-020-0335-9
|
| 19 |
WANG K Y, YIN P C, YANG H P, et al. The man-machine motion planning of rigid-flexible hybrid lower limb rehabilitation robot [J]. Advances in Mechanical Engineering, 2018, 10(6): 1687814018775865.
|
| 20 |
WANG Y L, WANG K Y, ZHANG Z X, et al Appraisement and analysis of dynamical stability of under-constrained cable-driven lower limb rehabilitation training robot[J]. Robotica, 2020, 39 (6): 1023- 1036
|
| 21 |
王砚麟, 赵志刚, 苏程, 等 欠约束多机协调吊运系统工作空间和运动稳定性分析[J]. 振动与冲击, 2017, 36 (16): 44- 50
WANG Yan-lin, ZHAO Zhi-gang, SU Cheng, et al Analysis of the workspace and dynamic stability of a multi-robot collaboratively towing system[J]. Journal of Vibration and Shock, 2017, 36 (16): 44- 50
|
| 22 |
赵志刚, 王砚麟, 李劲松 多机器人协调吊运系统力位姿混合运动稳定性评价方法[J]. 哈尔滨工程大学学报, 2018, 39 (1): 148- 155
ZHAO Zhi-gang, WANG Yan-lin, LI Jin-song Appraise of dynamical stability of multi-robots cooperatively lifting system based on hybrid force-position-pose approach[J]. Journal of Harbin Engineering University, 2018, 39 (1): 148- 155
|
| 23 |
ZHAO T, ZI B, QIAN S, et al Algebraic method-based point-to-point trajectory planning of an under-constrained cable-suspended parallel robot with variable angle and height cable mast[J]. Chinese Journal of Mechanical Engineering, 2020, 33 (1): 54
doi: 10.1186/s10033-020-00473-z
|
| 24 |
韦慧玲, 仇原鹰, 盛英 高速绳牵引摄像机器人的运动稳定控制[J]. 西安电子科技大学学报, 2016, 43 (5): 63- 69
WEI Hui-ling, QIU Yuan-ying, SHENG Ying Motion stable control for cable-driven parallel camera robots with high speeds[J]. Journal of Xidian University, 2016, 43 (5): 63- 69
doi: 10.3969/j.issn.1001-2400.2016.05.012
|
| 25 |
WANG Y L, WANG K Y, ZHANG Z X, et al Control strategy and experimental research of a cable-driven lower limb rehabilitation robot[J]. Proceedings of the Institution of Mechanical Engineers Part C-Journal of Mechanical Engineering Science, 2020, 235 (13): 2468- 2481
|
| 26 |
CHEN Q, ZI B, SUN Z, et al Design and development of a new cable-driven parallel robot for waist rehabilitation[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24 (4): 1497- 1507
doi: 10.1109/TMECH.2019.2917294
|
| 27 |
PLOOIJ M, KELLER U, STERKE B, et al Design of RYSEN: an intrinsically safe and low-power three-dimensional overground body weight support[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 2253- 2260
doi: 10.1109/LRA.2018.2812913
|
| 28 |
吴博松. 基于仿肌肉柔索驱动的下肢康复机器人研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.
WU Bo-song. Research on lower limb rehabilitation robot based on imitating muscle wire-drive [D]. Harbin: Harbin Engineering University, 2017.
|
| 29 |
DUAN Q J, VASHISTA V, AGRAWAL S K Effect on wrench-feasible workspace of cable-driven parallel robots by adding springs[J]. Mechanism and Machine Theory, 2015, 86: 201- 210
doi: 10.1016/j.mechmachtheory.2014.12.009
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|