| Robotic and Mechanism Design |
|

|
|
|
| Design and analysis of adaptive double-sided window cleaning robot for curved glass |
Jie ZHOU( ),Tao LI(),Guozhi LIU ),Tao LI(),Guozhi LIU |
| School of Automation, Nanjing University of Information Science and Technology, Nanjing 210044, China |
|
|
|
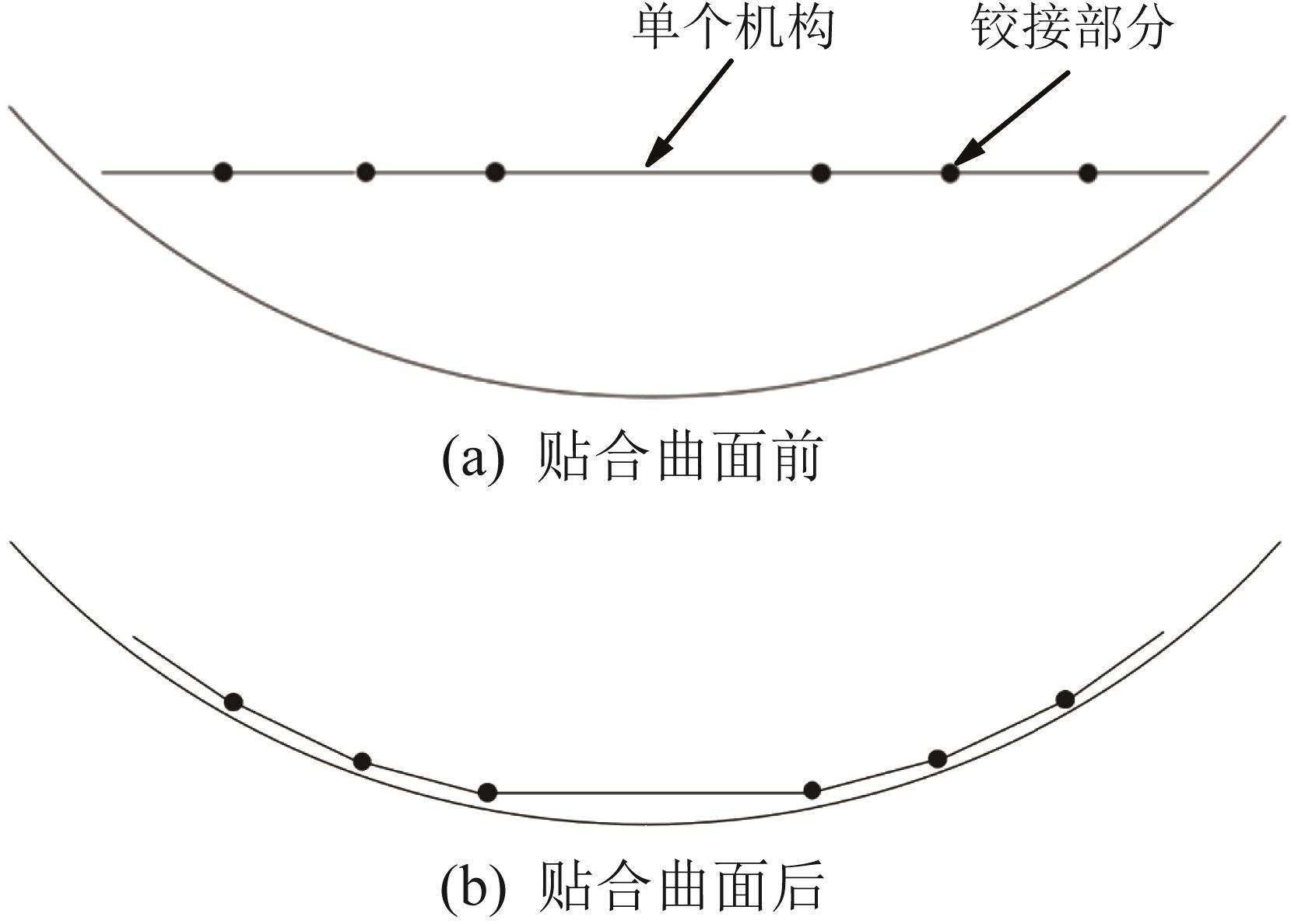
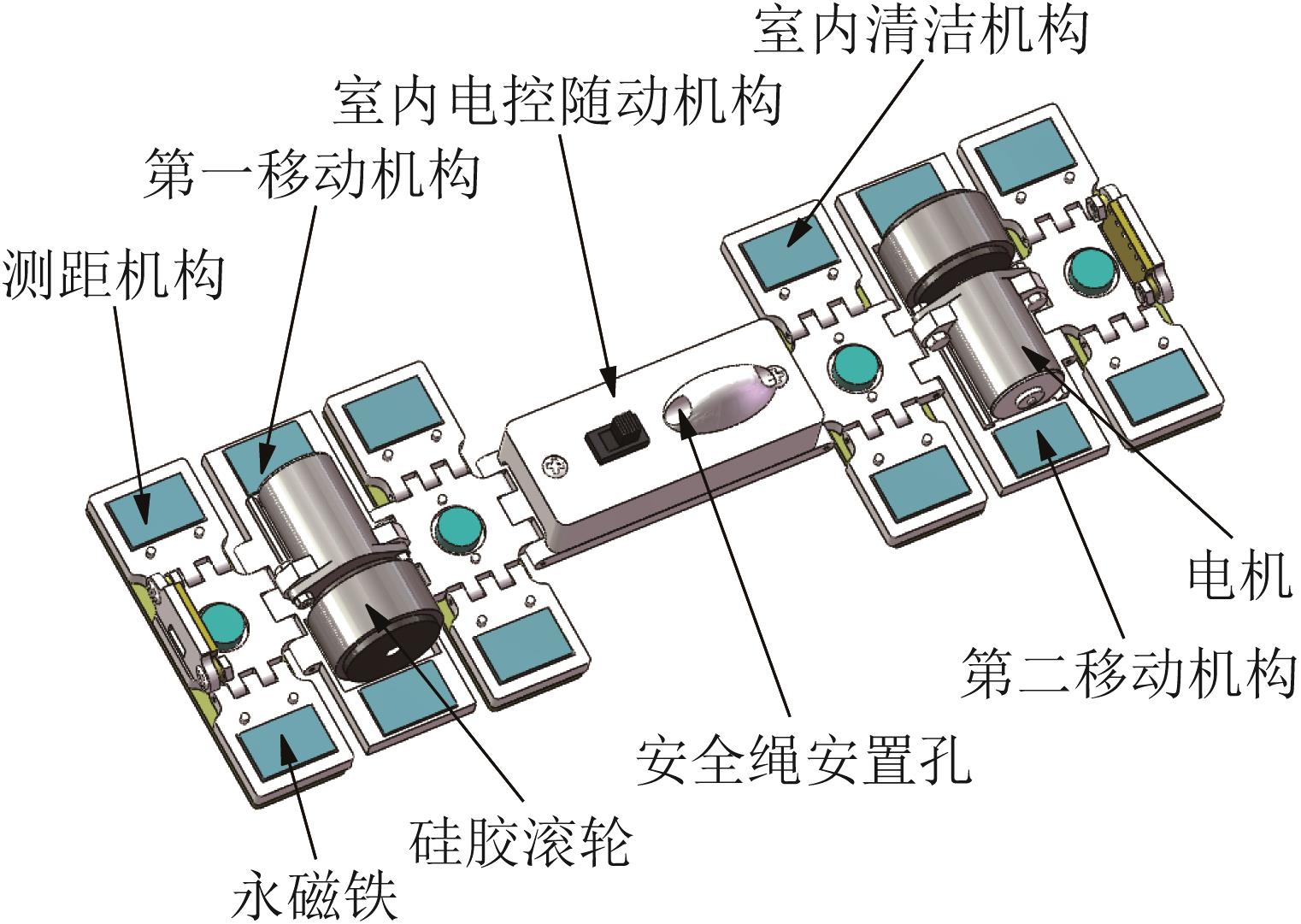
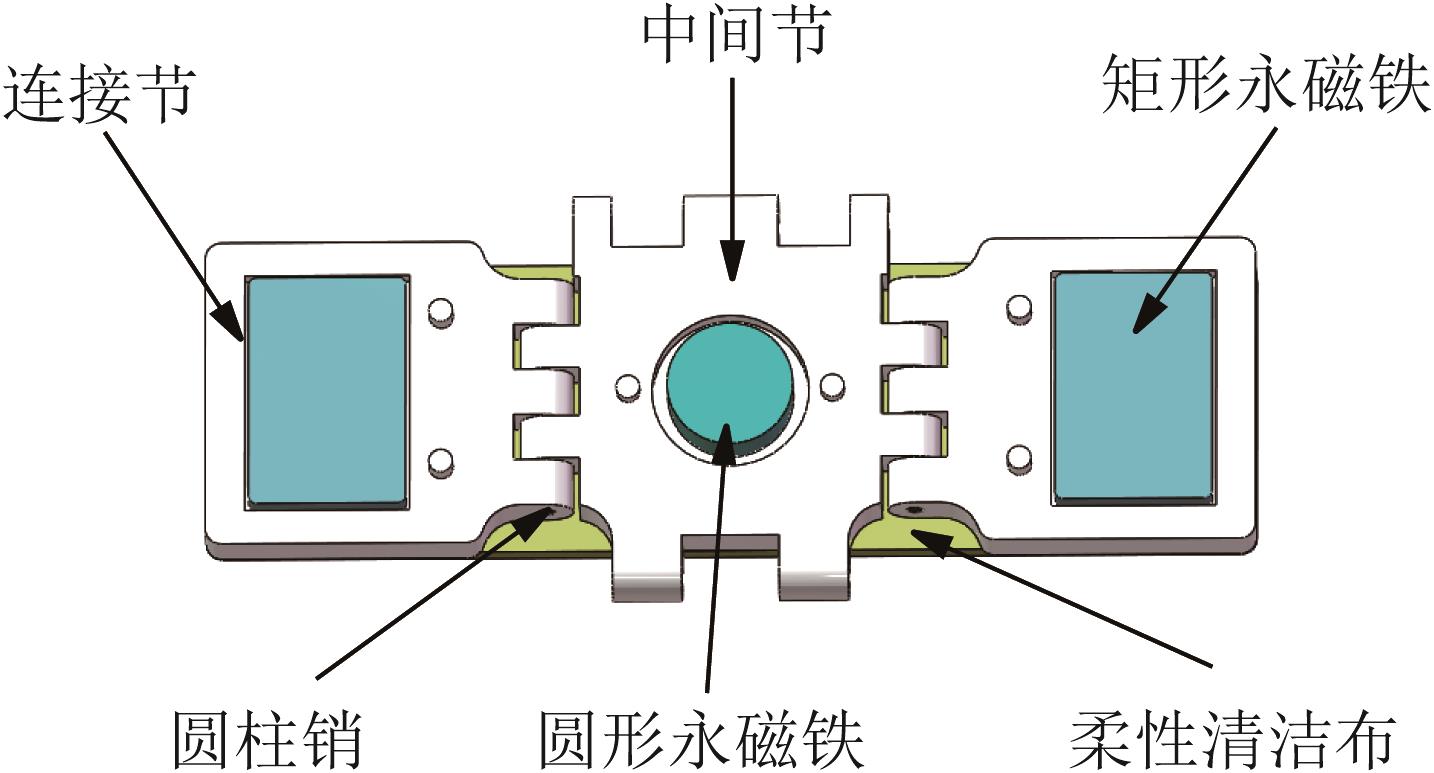
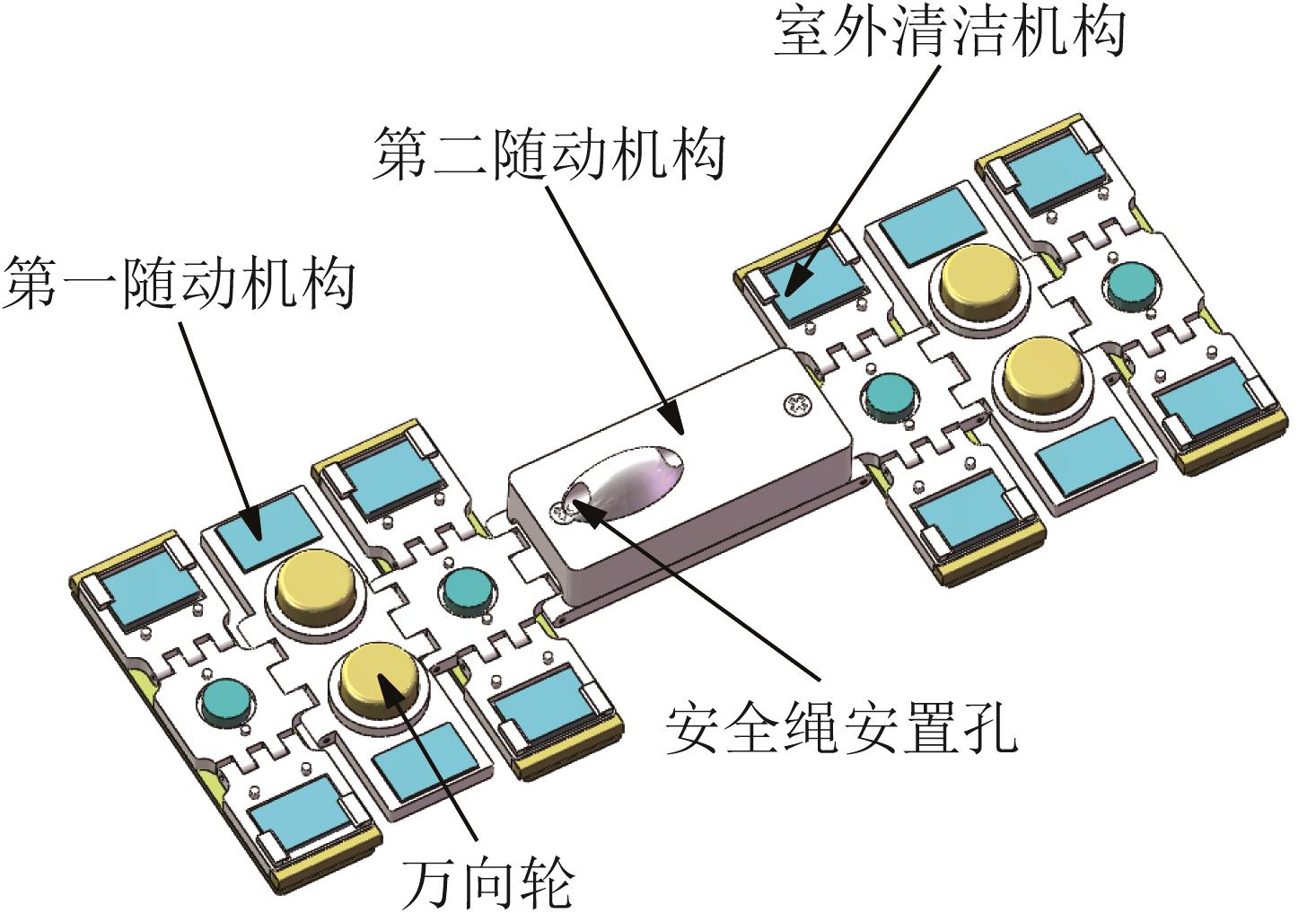
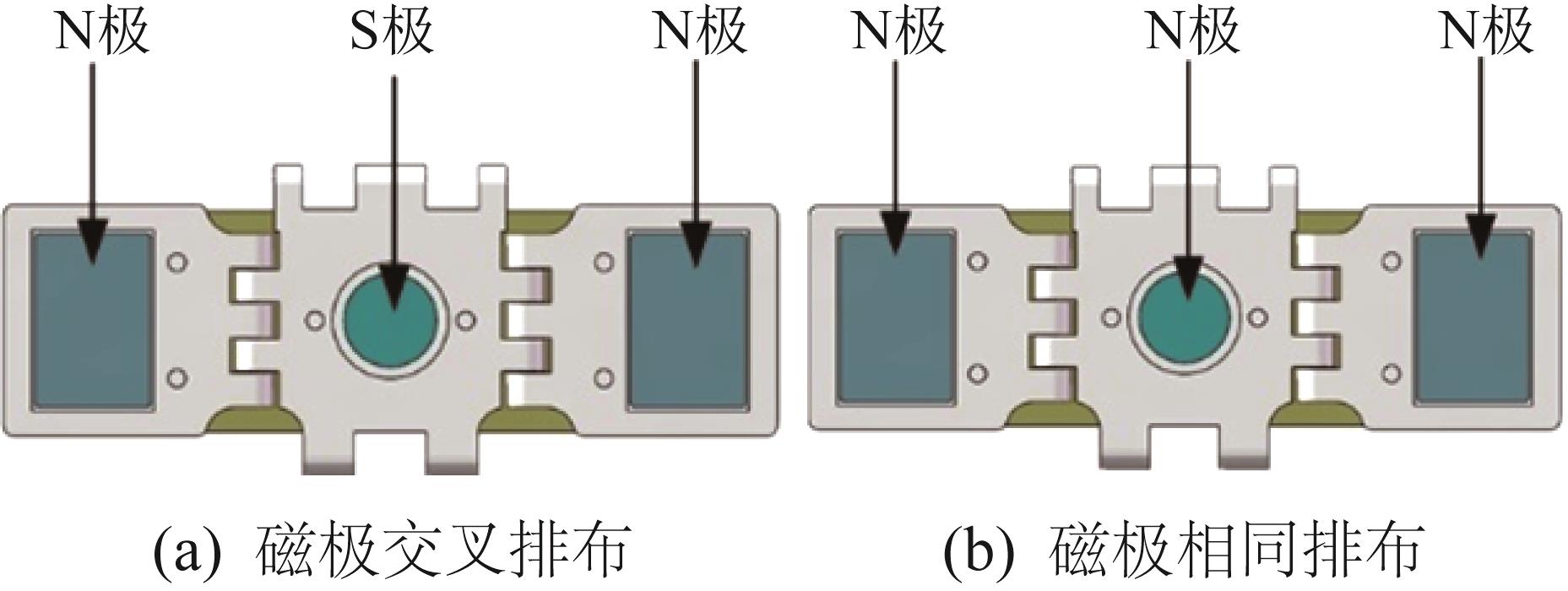
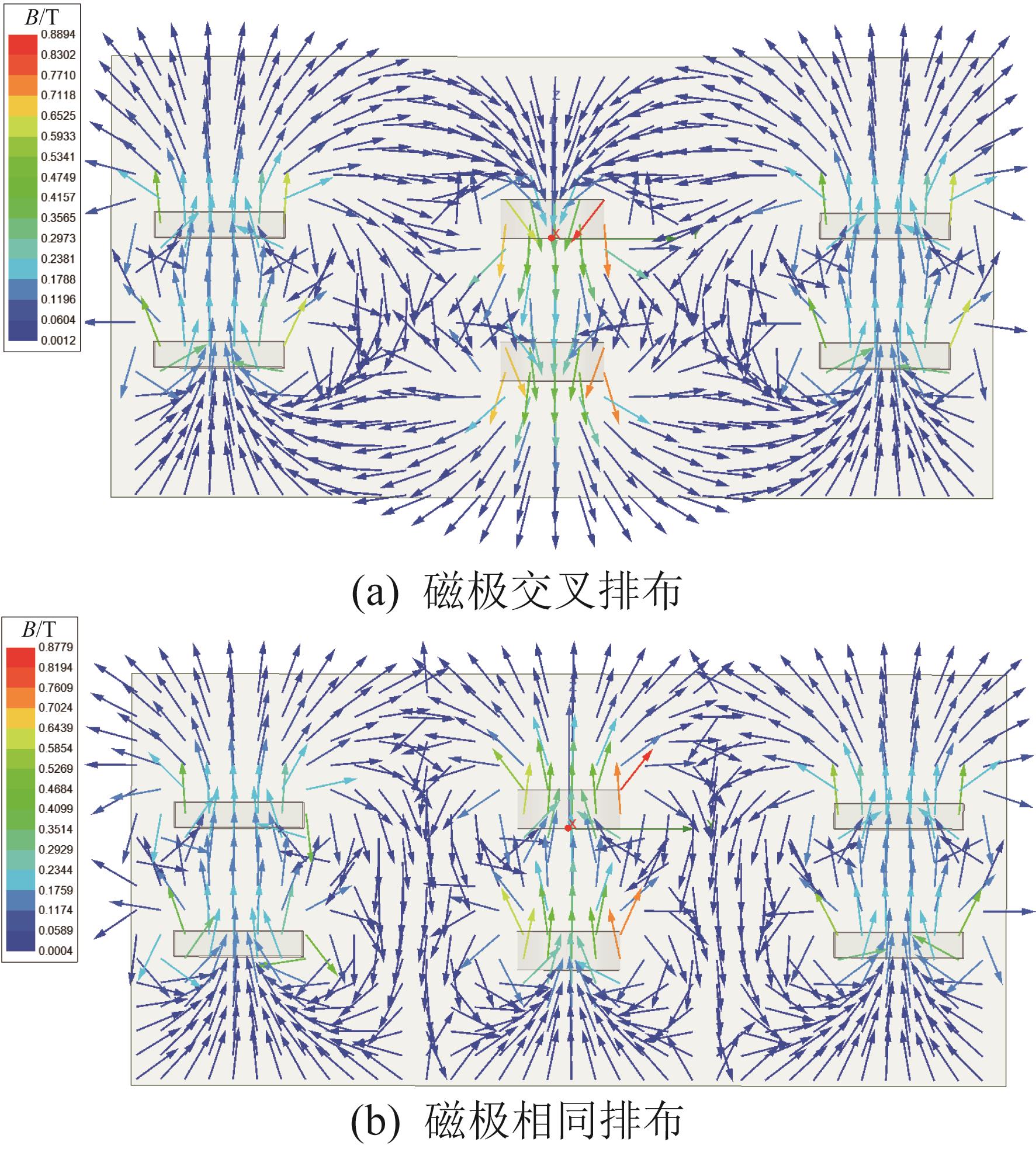
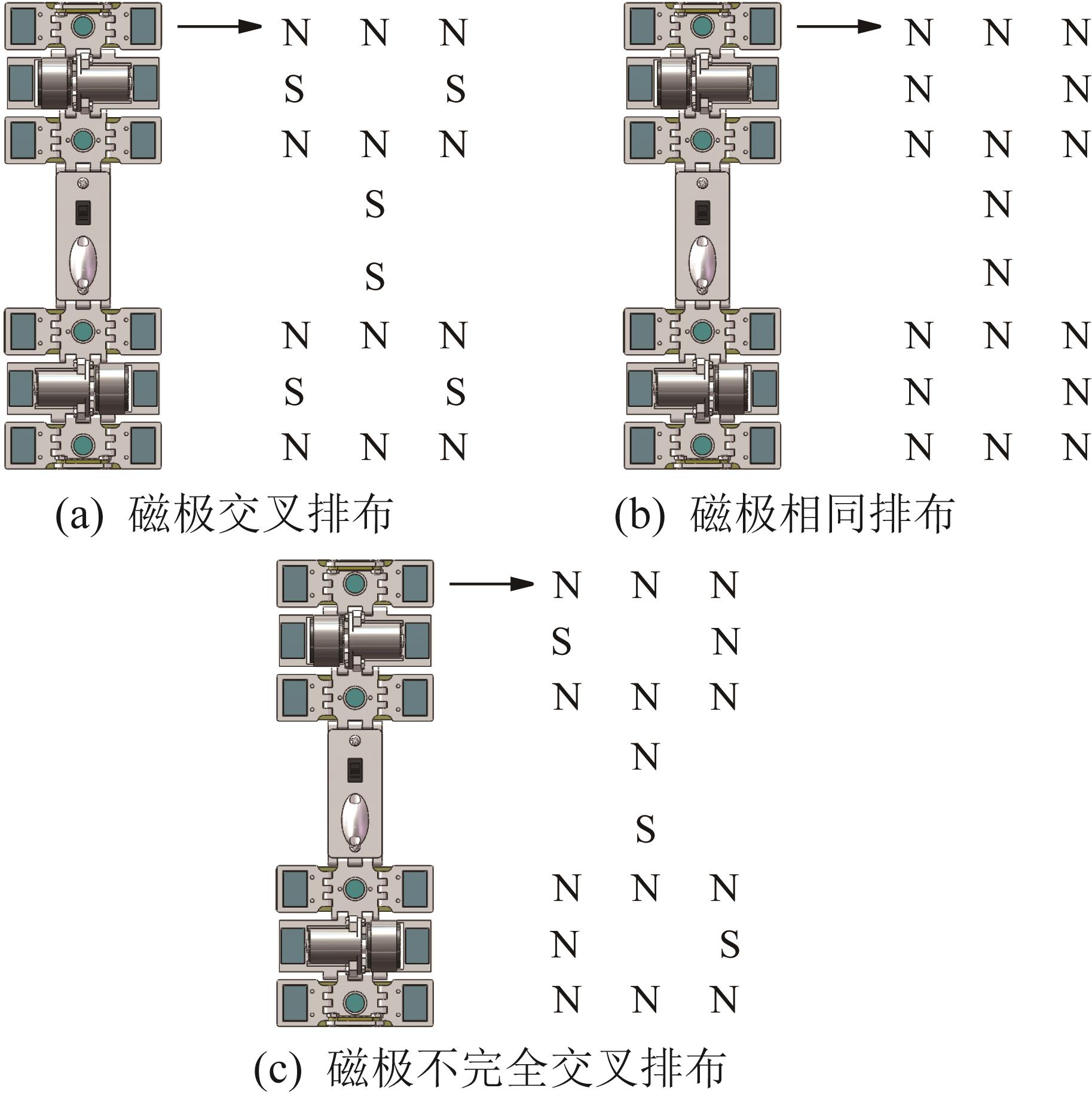
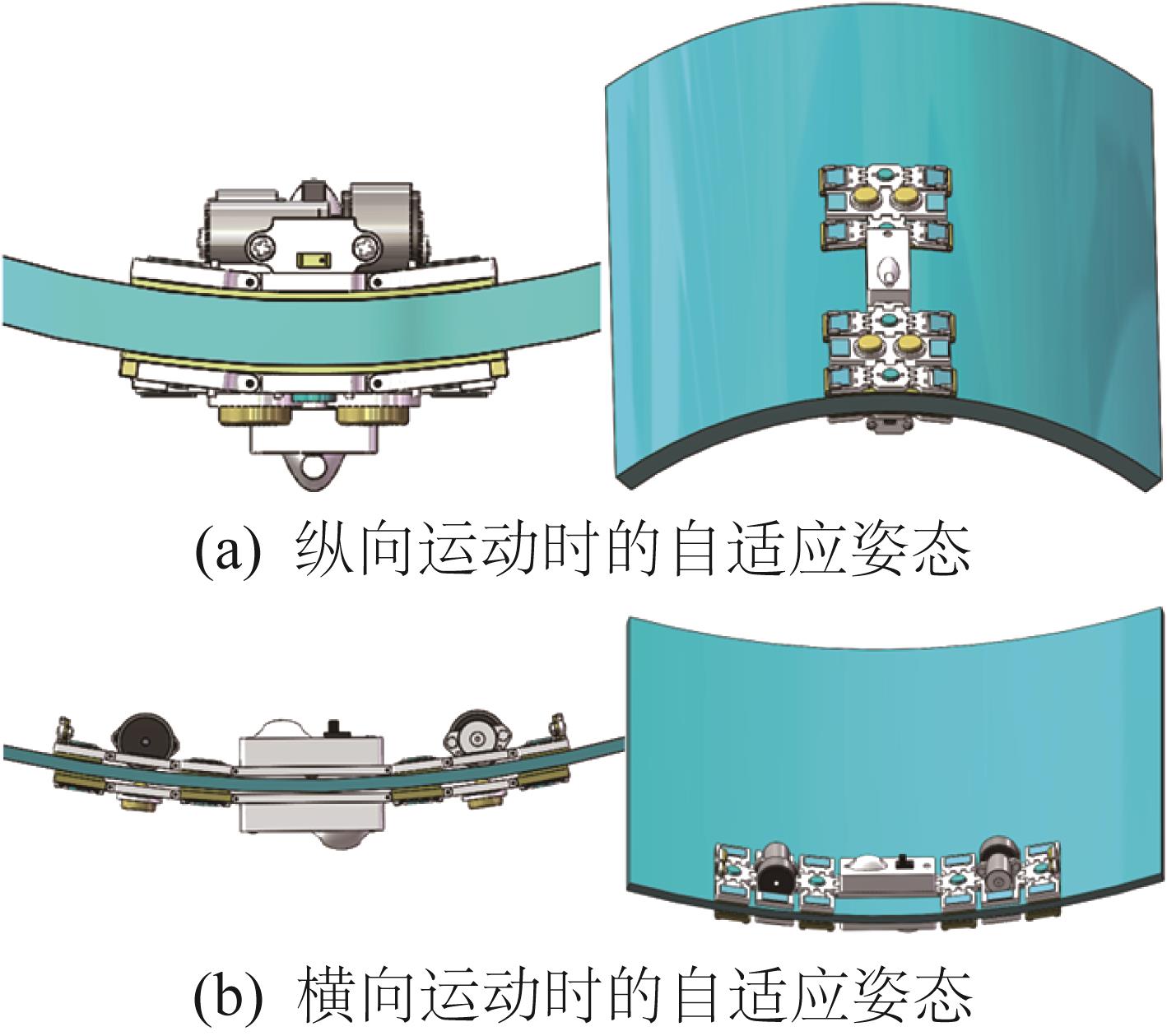
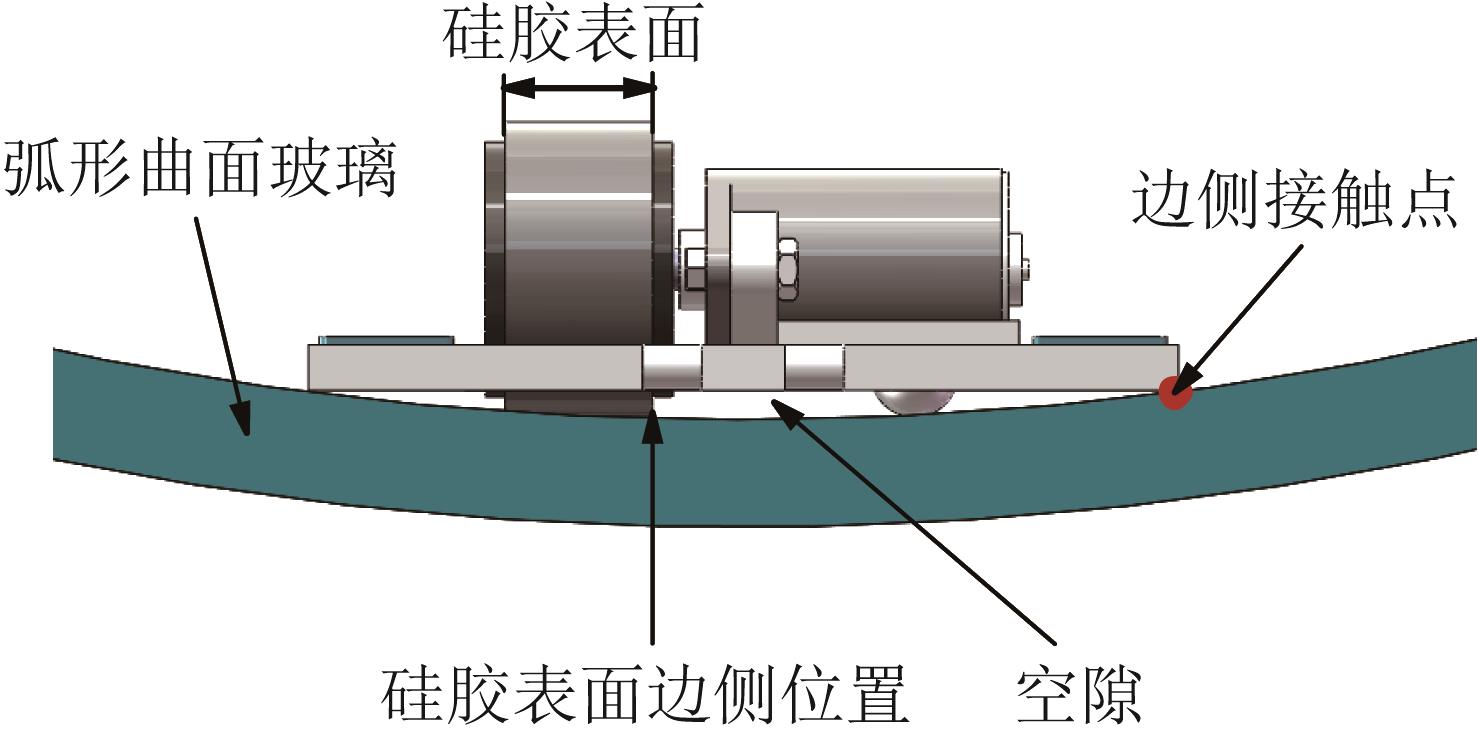
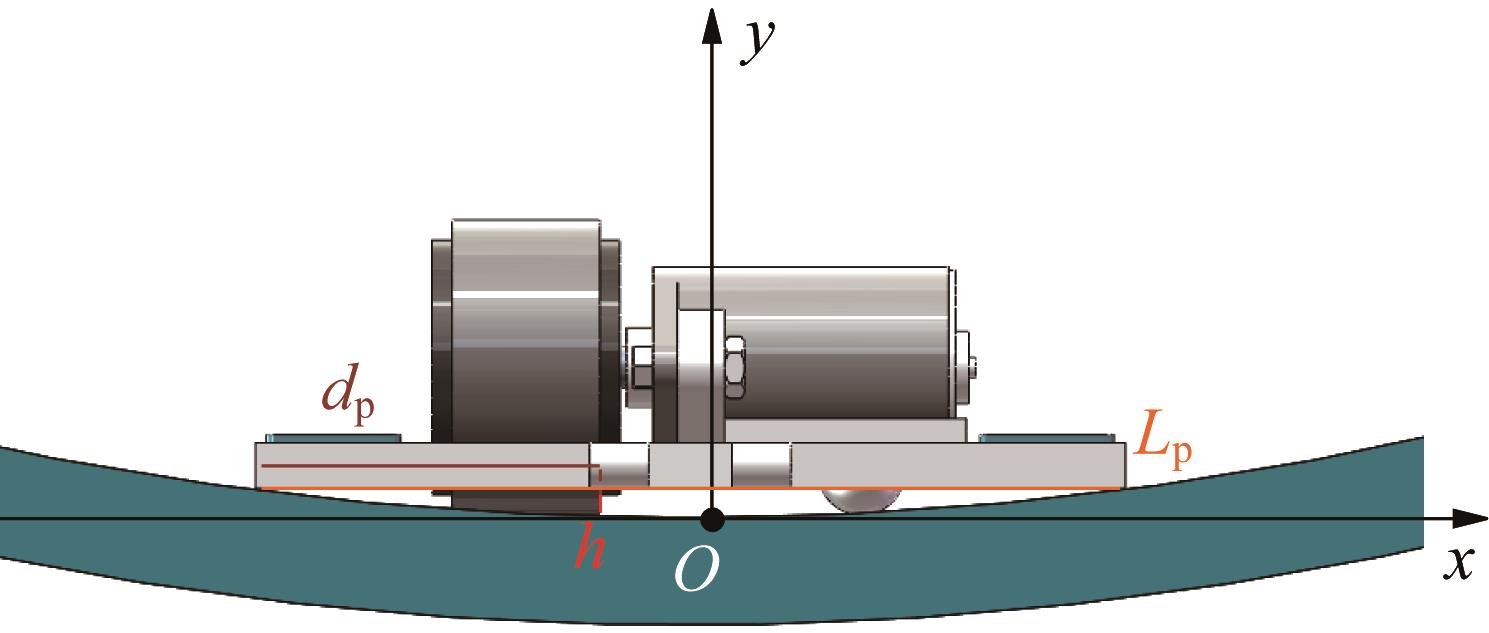
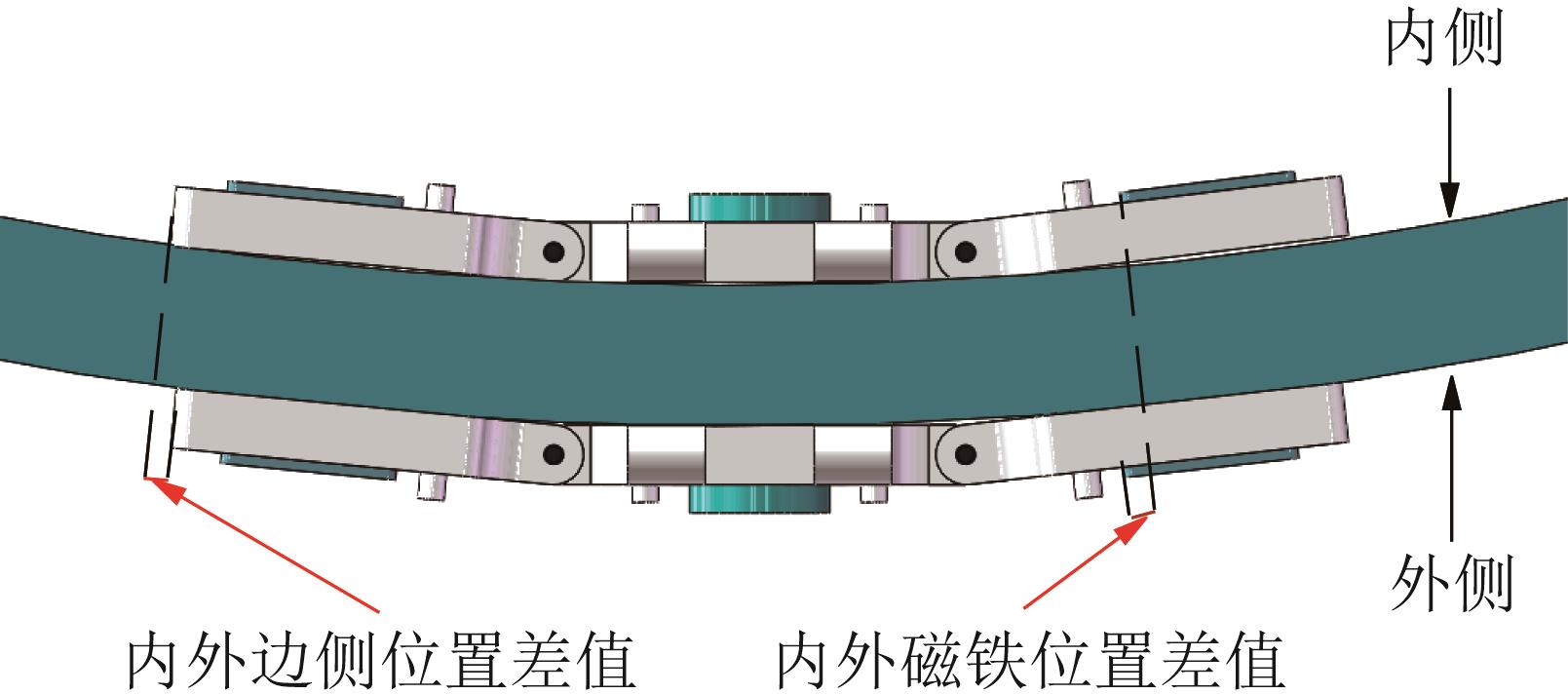
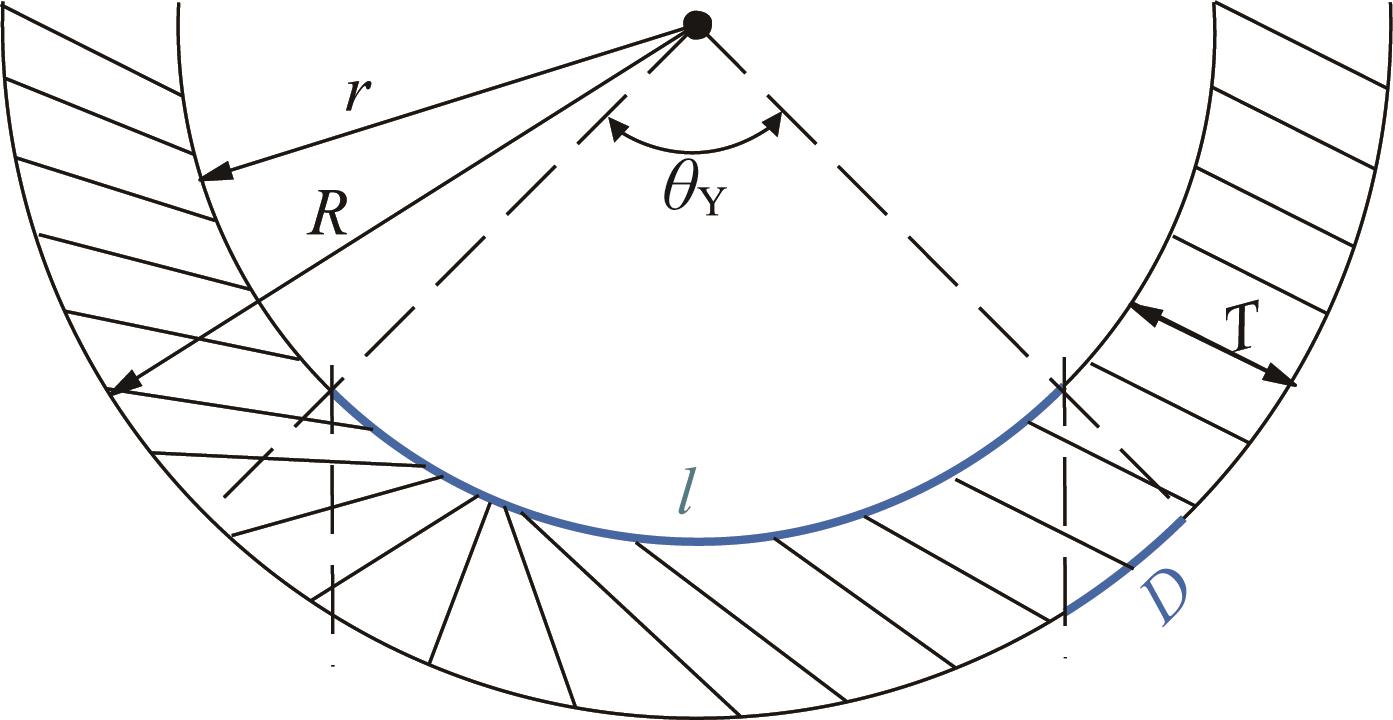
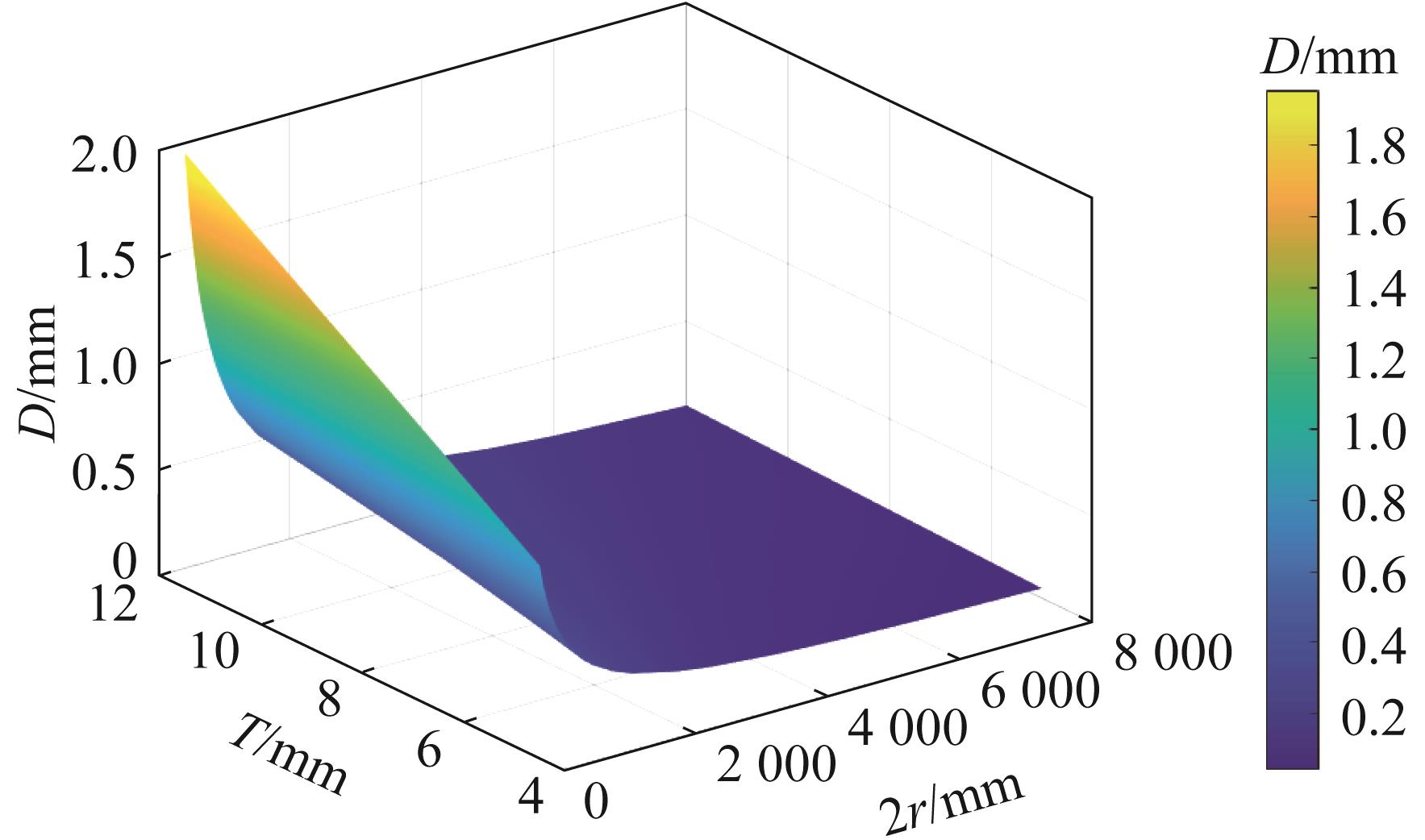
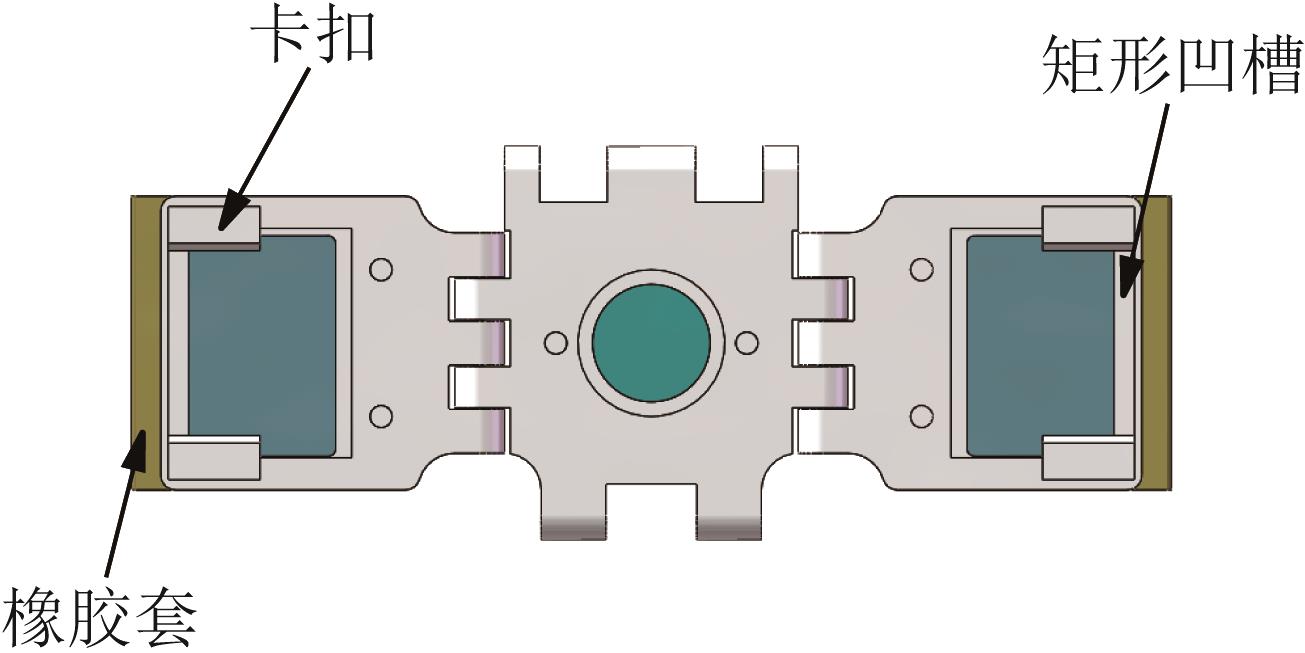
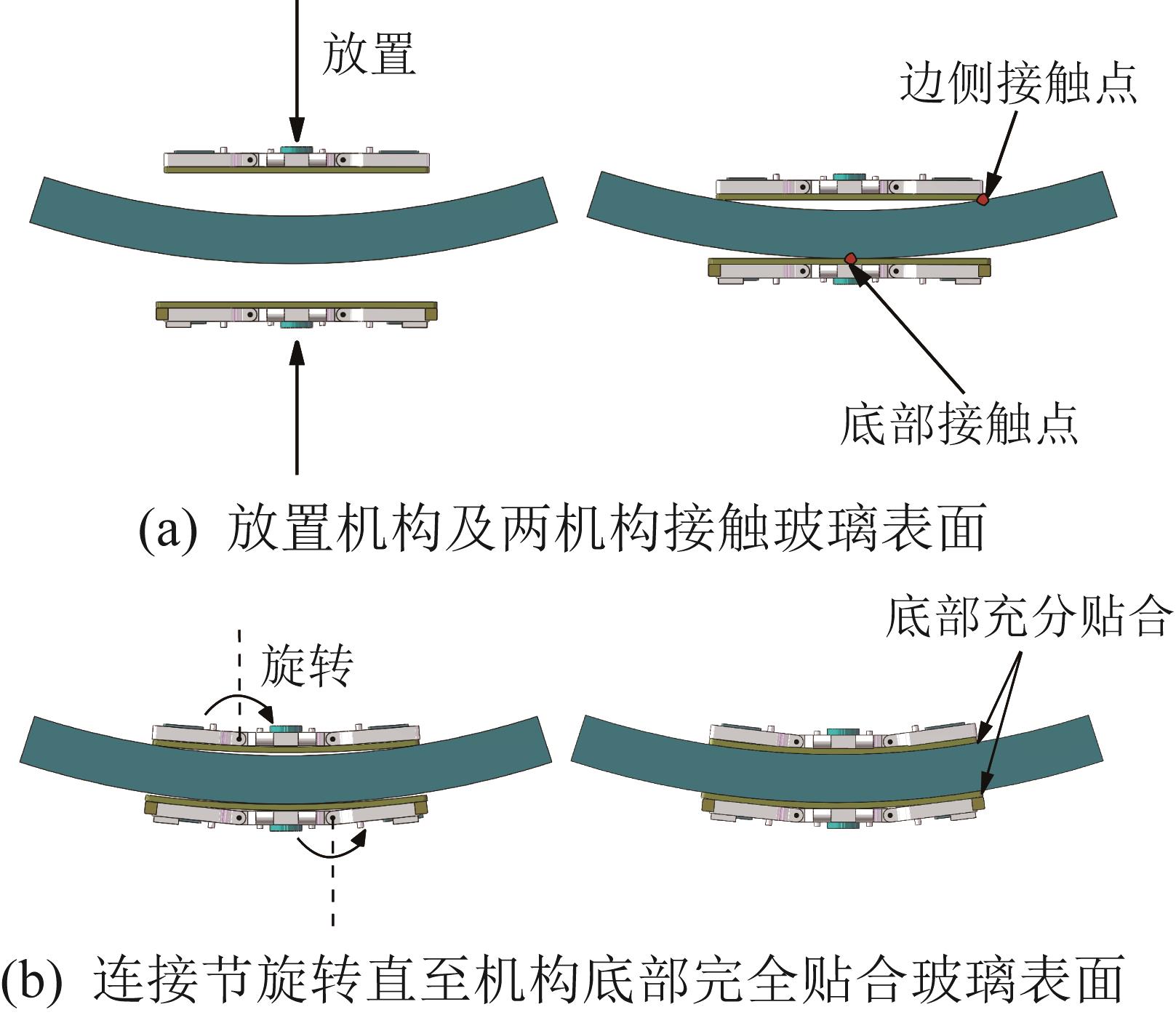
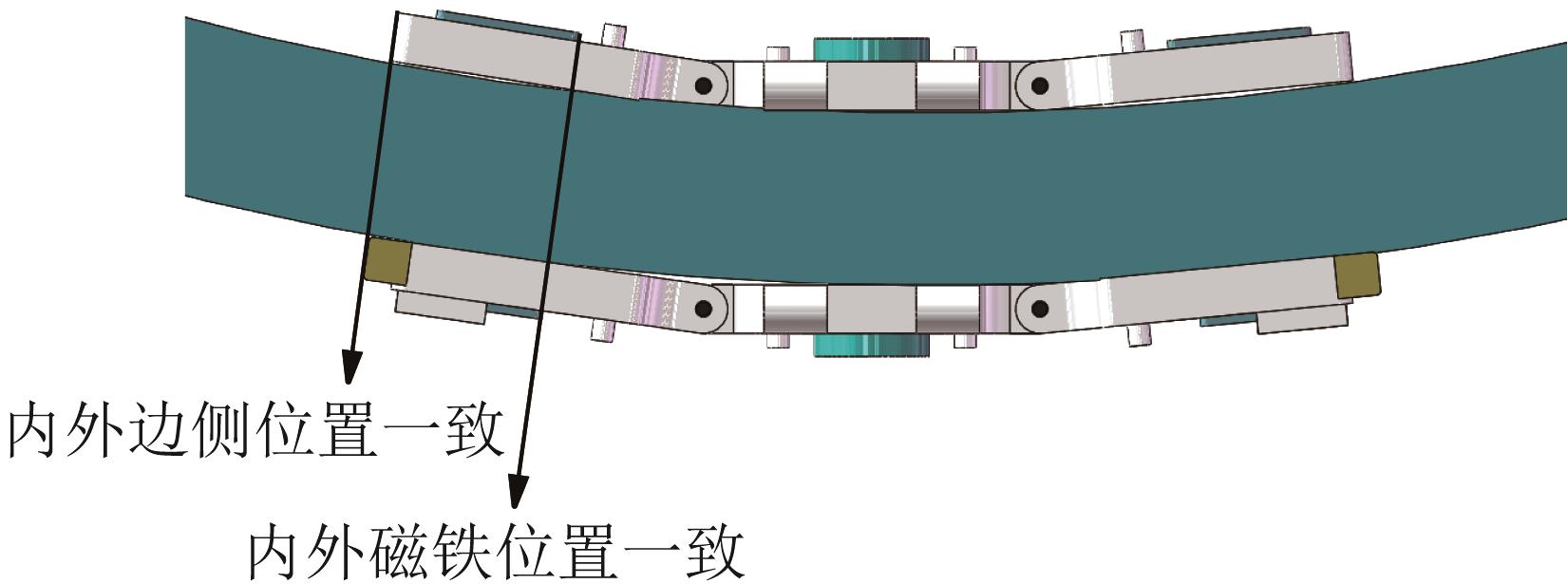
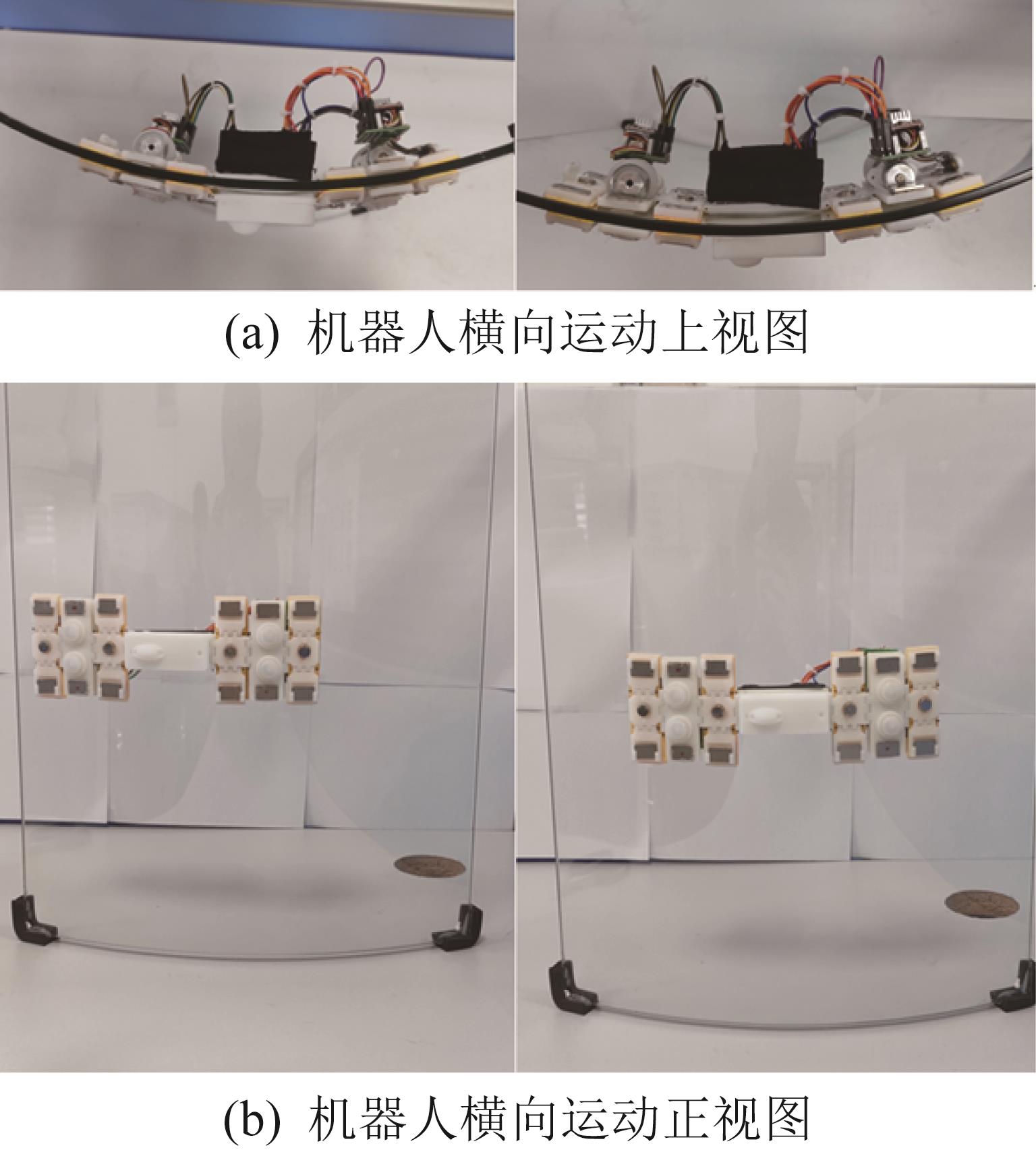
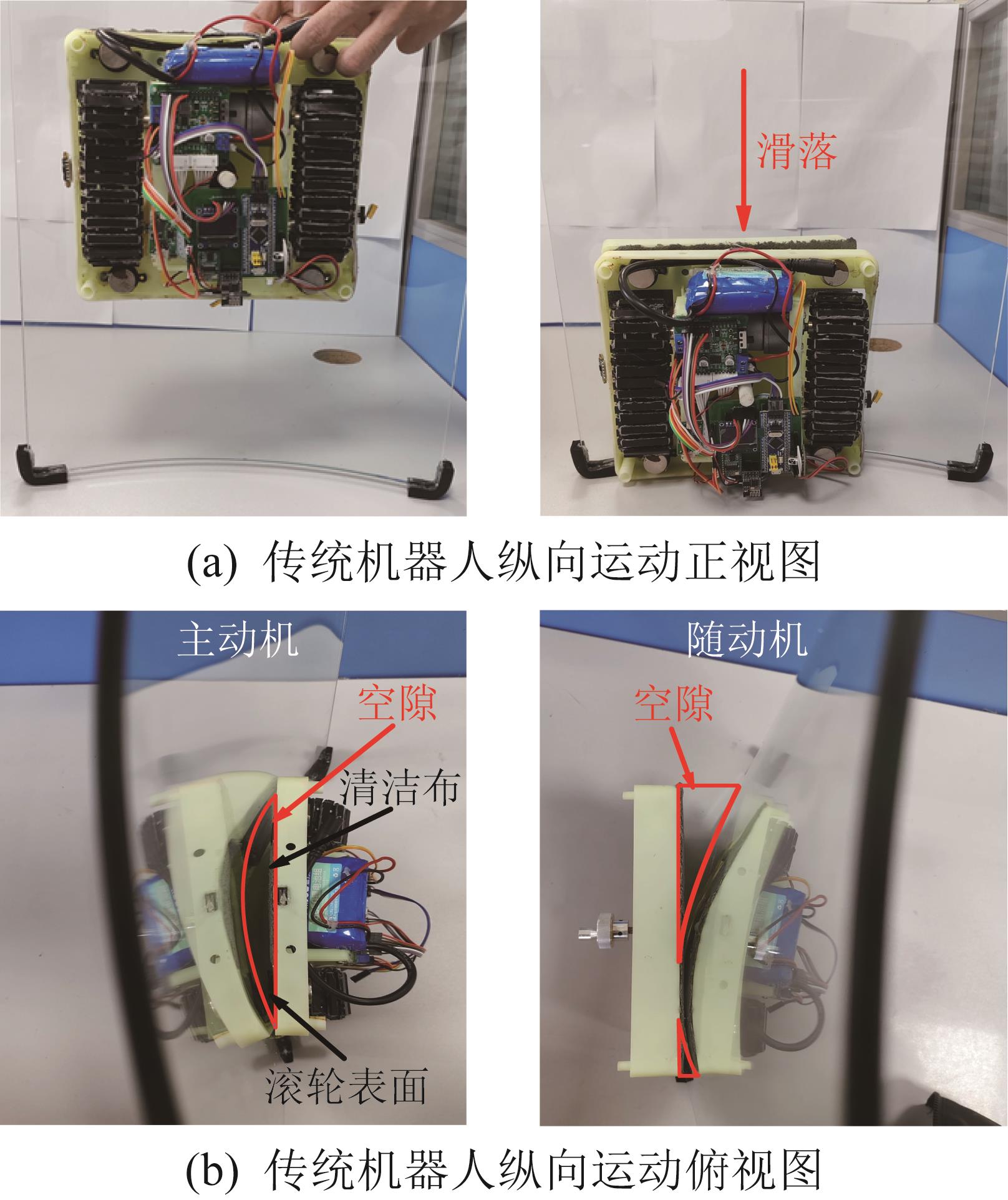
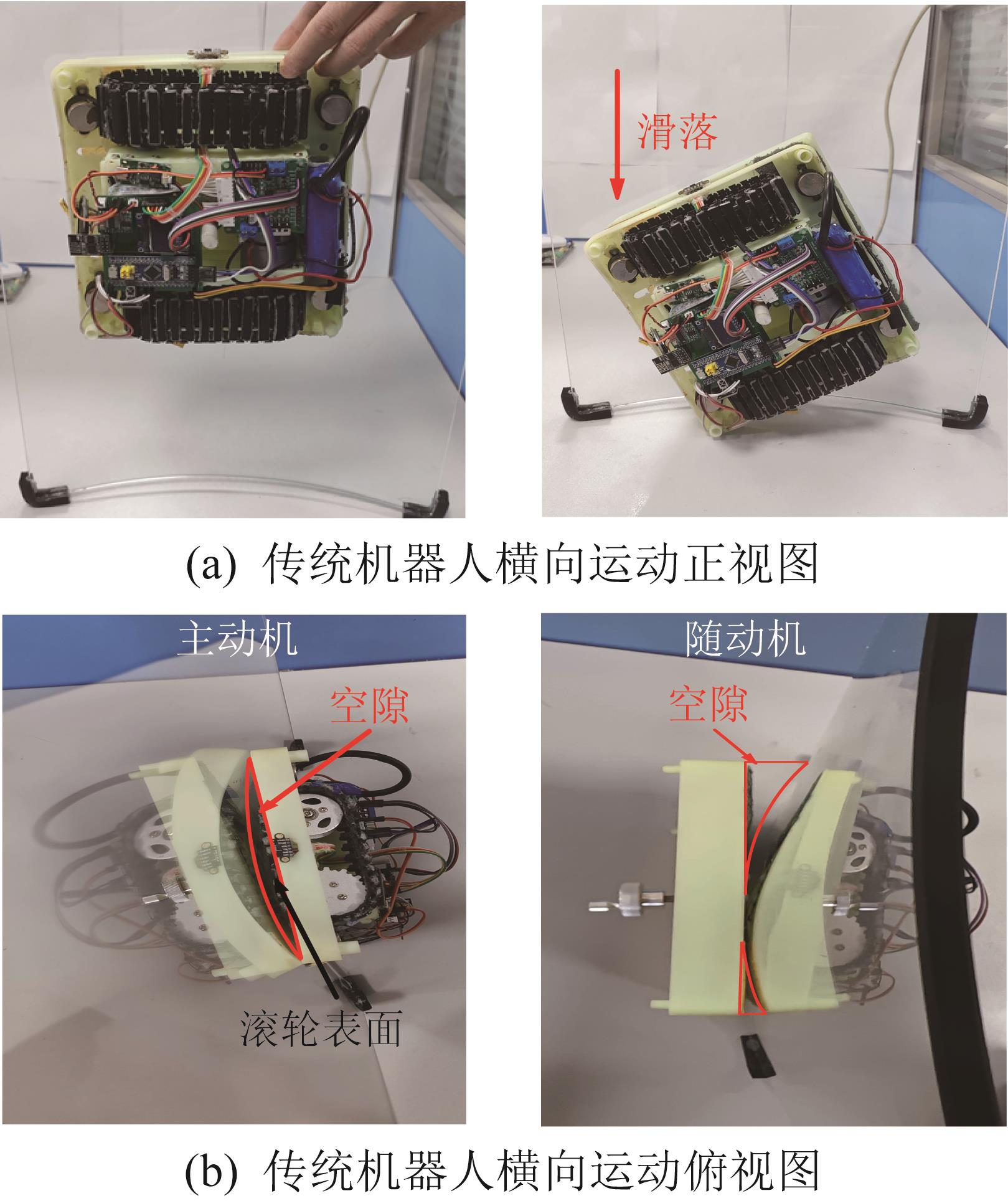
Abstract Aiming at the problems that the existing window cleaning robots cannot work normally and have poor cleaning effects on curved glass, an adaptive double-sided window cleaning robot for curved glass has been designed. This robot adopted a dual-machine design, with both bodies consisting of multiple articulated mechanisms equipped with magnetic adhesion devices. The cleaning mechanism was composed of multiple articulated section units. During the process of the robot conforming to the curved glass, the articulated structures between adjacent mechanisms and adjacent section units formed included angles under the drive of magnetic adsorption devices, so as to achieve the self-adaptation of the robot to the curvature of curved glass surfaces. On this basis, the magnetic pole arrangement mode of the robot was optimized, and the curved-surface adaptability and motion stability of the robot were analyzed. The adaptive problem of robot caused by the changes in the thickness and curvature of curved glass was solved, and the constraint conditions for the stable operation of the robot in different postures were obtained. Finally, experimental tests were carried out in the actual working environment of the robot. The results showed that the designed robot had a good adaptive conforming effect and reliable motion stability on curved glass surfaces. The research results provide new ideas and solutions for the further development of curved glass cleaning robot technology.
|
|
Received: 14 November 2024
Published: 02 July 2025
|
|
|
|
Corresponding Authors:
Tao LI
E-mail: 202312490100@nuist.edu.cn;litaojia@163.com
|
应用于曲面玻璃的自适应双面擦窗机器人设计与分析
针对现有擦窗机器人在曲面玻璃上无法正常工作、清洁效果差等问题,设计了一种应用于曲面玻璃的自适应双面擦窗机器人。该机器人整体采用双机设计,两机体在结构上均由多个机构铰接组成,各机构均设有磁吸附装置,清洁机构由多个节单元铰接组成。在机器人贴合曲面玻璃的过程中,各相邻机构以及各相邻节单元之间的铰接结构在磁吸附装置的驱动下产生夹角,以实现机器人对曲面玻璃表面弧度的自适应。在此基础上,对机器人的磁极排布方式进行了优化,并分析了机器人的曲面自适应性及运动稳定性,解决了曲面玻璃厚度及曲率变化引起的机器人自适应问题,得到了机器人在不同姿态下稳定工作的约束条件。最后,在机器人的实际工作环境中开展了实验测试。结果表明,所设计的机器人在曲面玻璃表面具有良好的自适应贴合效果和可靠的运动稳定性。研究结果为曲面玻璃清洁机器人技术的进一步发展提供了新的思路和解决方案。
关键词:
擦窗机器人,
铰接结构,
双机设计,
曲面自适应性,
运动稳定性
|
|
| [[1]] |
徐良君. 擦窗机器人结构设计及关键技术研究[D]. 天津: 河北工业大学, 2017.
XU L J. Structural design and key technical research of window cleaning robot[D]. Tianjin: Hebei University of Technology, 2017.
|
|
|
| [[2]] |
李峰亮. 磁吸附擦窗机器人结构设计及关键技术研究[D]. 天津: 河北工业大学, 2018.
LI F L. Structural design and key technology research of magnetically adsorbed window cleaning robot[D]. Tianjin: Hebei University of Technology, 2018.
|
|
|
| [[3]] |
孙立新, 李峰亮, 董鹏, 等. 磁吸附轮式擦窗机器人动力学建模与仿真[J]. 机械设计与制造, 2020(1): 256-259.
SUN L X, LI F L, DONG P, et al. Dynamics modeling and simulation on magnetic adsorption wheel of window cleaning robot[J]. Machinery Design & Manufacture, 2020(1): 256-259.
|
|
|
| [[4]] |
史博文. 磁吸附式家用擦窗机器人结构设计与工作性能分析[D]. 西安: 西安建筑科技大学, 2021.
SHI B W. Structural design and working performance analysis of a magnetic adsorption type household window cleaning robot[D]. Xi'an: Xi'an University of Architecture and Technology, 2021.
|
|
|
| [[5]] |
李育典, 郝雪峰, 张金峰, 等. 超高大曲面玻璃砖幕墙施工技术[J]. 施工技术(中英文), 2024, 53(9): 146-150.
LI Y D, HAO X F, ZHANG J F, et al. Construction technology of super tall curved glass brick curtain wall[J]. Construction Technology, 2024, 53(9): 146-150.
|
|
|
| [[6]] |
杜波波. 基于BIM的曲面玻璃穹顶深化设计研究[J]. 施工技术(中英文), 2023, 52(5): 61-64.
DU B B. Research on deepening design of curved glass dome based on BIM[J]. Construction Technology, 2023, 52(5): 61-64.
|
|
|
| [[7]] |
许占勇, 郭永成. 多曲面幕墙工艺创新与成本分析[J]. 建筑结构, 2020, 50(): 933-936.
XU Z Y, GUO Y C. Technological innovation and cost analysis of multi-curved curtain wall[J]. Building Structure, 2020, 50(): 933-936.
|
|
|
| [[8]] |
常春峰. 真空吸附式叶片爬壁机器人结构设计与分析[D]. 秦皇岛: 燕山大学, 2024.
CHANG C F. Structural design and analysis of vacuum adsorption blade wall climbing robot[D]. Qinhuangdao: Yanshan University, 2024.
|
|
|
| [[9]] |
李宏宇. 智能擦窗爬壁机器人的设计与实现[D]. 天津: 天津理工大学, 2018.
LI H Y. Design and implementation of an intelligent window climbing robot[D]. Tianjin: Tianjin University of Technology, 2018.
|
|
|
| [[10]] |
LI Z J, XU Q S, TAM L M. A survey on techniques and applications of window-cleaning robots[J]. IEEE Access, 2021, 9: 111518-111532.
|
|
|
| [[11]] |
曹旭昶, 孙振, 李飞, 等. 面向TEM手术的柔性机器人设计与控制[J]. 机器人, 2023, 45(4): 451-461.
CAO X C, SUN Z, LI F, et al. Design and control of a flexible robot for TEM surgery[J]. Robot, 2023, 45(4): 451-461.
|
|
|
| [[12]] |
MAHAPATRA S K, GHOSAL A. Modeling, simulations and experiments with generally routed cable-driven continuum robots and their application to three-fingered grippers[J]. Robotica, 2024, 42(6): 1919-1934.
|
|
|
| [[13]] |
徐嘉骏, 张添一, 黄恺真, 等. 仿生柔性外肢体机器人的优化设计与实现[J]. 机器人, 2024, 46(2): 147-157. doi:10.1007/s10846-024-02102-6
XU J J, ZHANG T Y, HUANG K Z, et al. Optimal design and implementation of a bioinspired soft supernumerary robotic limb[J]. Robot, 2024, 46(2): 147-157.
doi: 10.1007/s10846-024-02102-6
|
|
|
| [[14]] |
杨培, 张明路, 孙凌宇. 爬壁机器人磁吸附模块设计分析与结构参数优化[J]. 工程设计学报, 2024, 31(5): 592-602.
YANG P, ZHANG M L, SUN L Y. Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot[J]. Chinese Journal of Engineering Design, 2024, 31(5): 592-602.
|
|
|
| [[15]] |
LUO G S, LUO C K, GAO S M, et al. Research on passive adaptive wall-climbing cleaning and inspection robot of marine cylindrical steel structure based on conical magnetic adsorption wheel[J]. Ocean Engineering, 2024, 314: 119676.
|
|
|
| [[16]] |
LIU J, XIE C Y, YANG Y S, et al. Study on the influence of wind load on the safety of magnetic adsorption wall-climbing inspection robot for gantry crane[J]. Journal of Marine Science and Engineering, 2024, 12(11): 2102.
|
|
|
| [[17]] |
GAO Y L, WANG Y J. Research on the dynamic behaviors in the sliding friction of silicone[J]. Tribology Letters, 2022, 71(1): 15.
|
|
|
| [[18]] |
张小俊, 吴亚淇, 刘昊学, 等. 轮足式磁吸附越障爬壁机器人设计与分析[J]. 机械工程学报, 2024, 60(1): 248-261. doi:10.3901/jme.2024.01.248
ZHANG X J, WU Y Q, LIU H X, et al. Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability[J]. Journal of Mechanical Engineering, 2024, 60(1): 248-261.
doi: 10.3901/jme.2024.01.248
|
|
|
| [[19]] |
赵飞, 姚震球, 凌宏杰, 等. 履带式爬壁除锈机器人设计及试验[J]. 机械设计与研究, 2023, 39(5): 29-33.
ZHAO F, YAO Z Q, LING H J, et al. Design and experiment of crawler wall-climbing derusting robot[J]. Machine Design & Research, 2023, 39(5): 29-33.
|
|
|
| [[20]] |
陈晋. 钕铁硼永磁材料的生产应用及发展前景[J]. 铸造技术, 2012, 33(4): 398-400.
CHEN J. Production applications and development proposals of NdFeB permanent magnet materials[J]. Foundry Technology, 2012, 33(4): 398-400.
|
|
|
| [[21]] |
孙朋, 李晓高, 冯浩, 等. 方形钕铁硼永磁铁的FEMM仿真模拟与磁力分析[J]. 金属功能材料, 2024, 31(4): 31-35.
SUN P, LI X G, FENG H, et al. Magnetic analysis and FEMM simulation of cylindrical NdFeB permanent magnet[J]. Metallic Functional Materials, 2024, 31(4): 31-35.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|