| Product Innovation Design |
|

|
|
|
| Design and implementation of launch and recovery system for AUV based on USV |
Mingshuo LI1,2,3( ),Lingshuai MENG2,3(),Haitao GU2,3,Xinxing CAO2,3,4,Mingyuan ZHANG2,3,5 ),Lingshuai MENG2,3(),Haitao GU2,3,Xinxing CAO2,3,4,Mingyuan ZHANG2,3,5 |
1.School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China
2.State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
3.Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
4.School of Mechanical Engineering and Automation, Northeastern University, Shenyang 110819, China
5.University of Chinese Academy of Sciences, Beijing 100049, China |
|
|
|
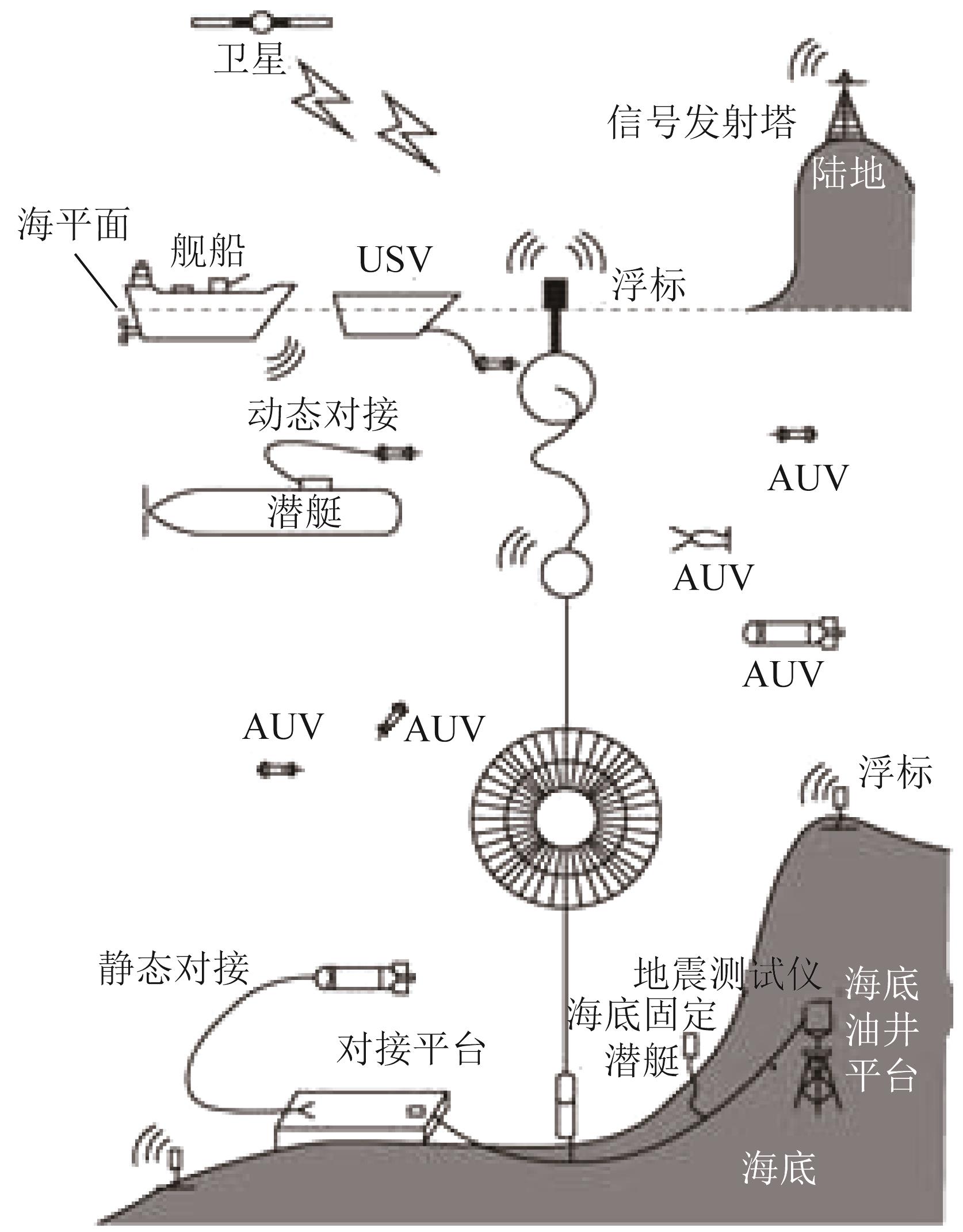
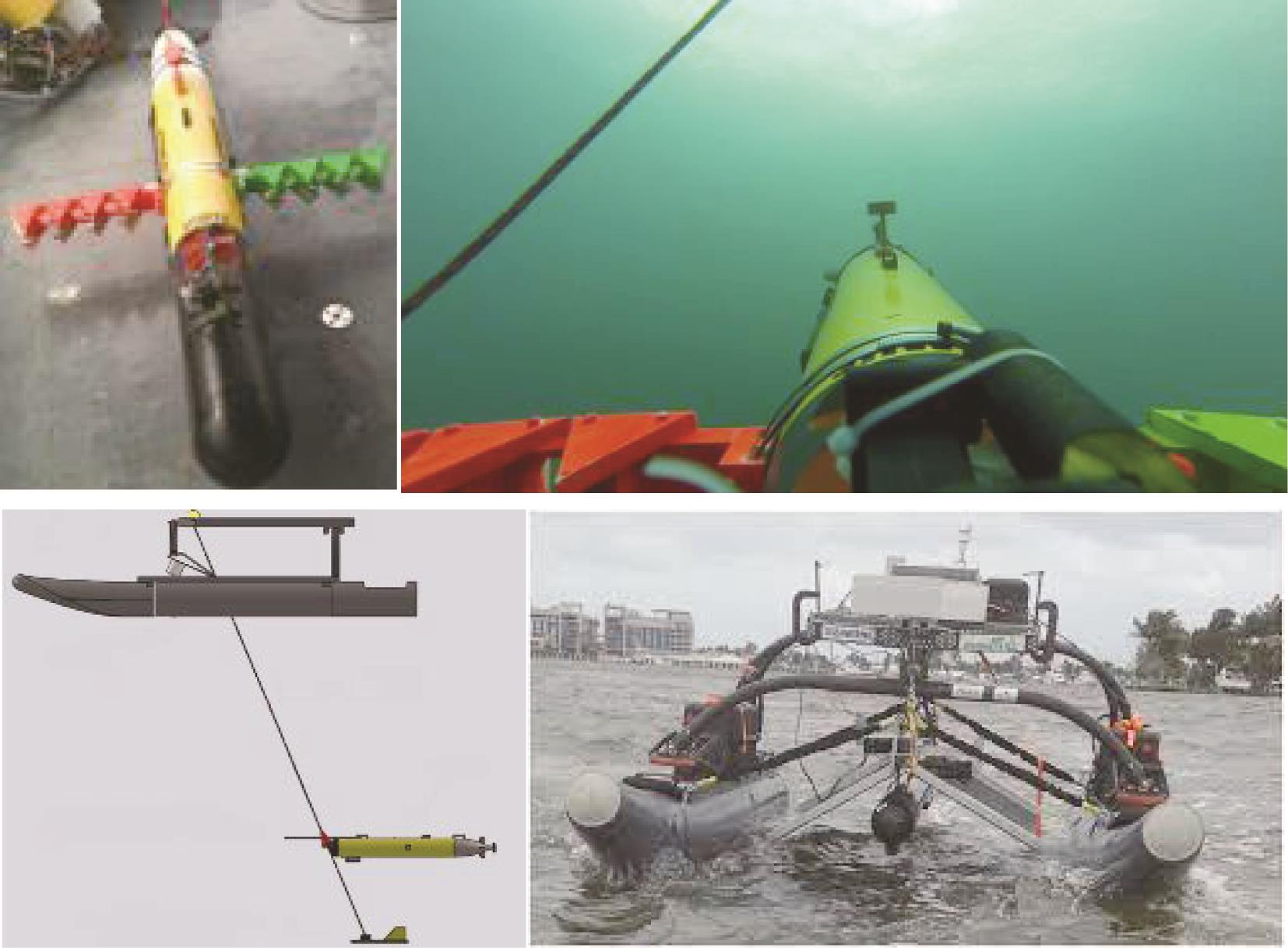
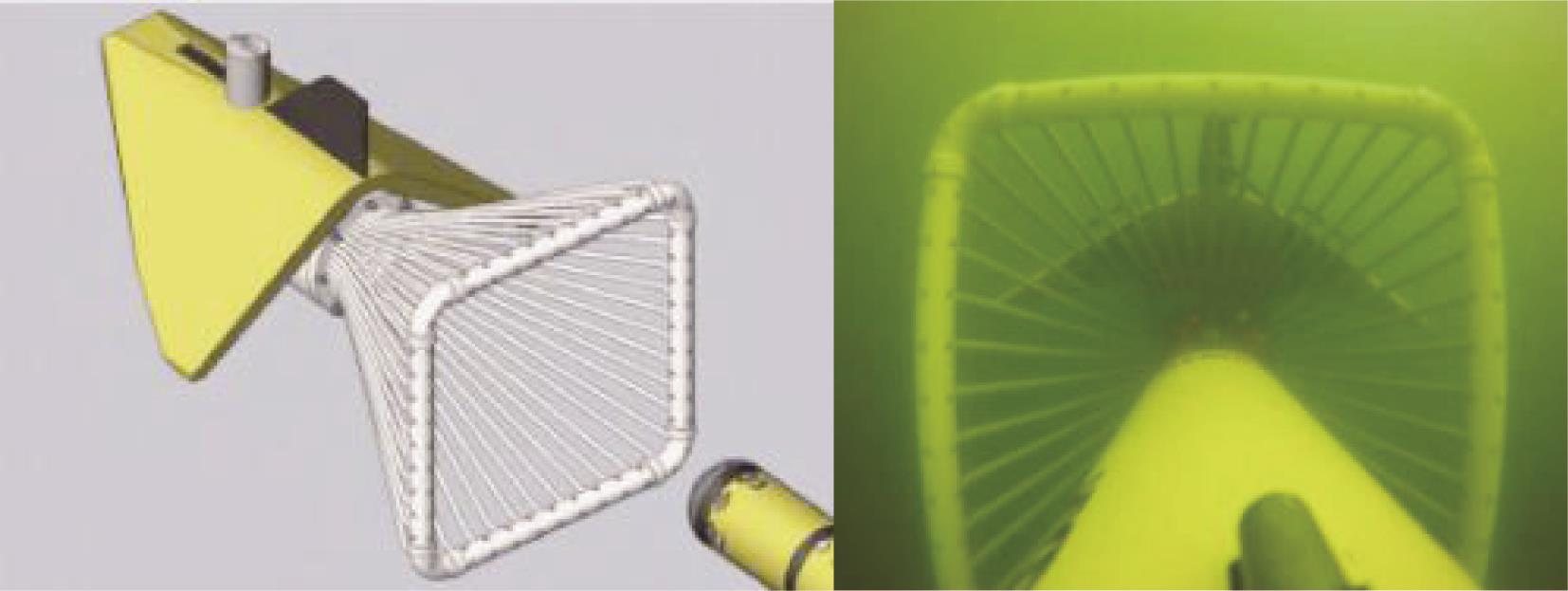
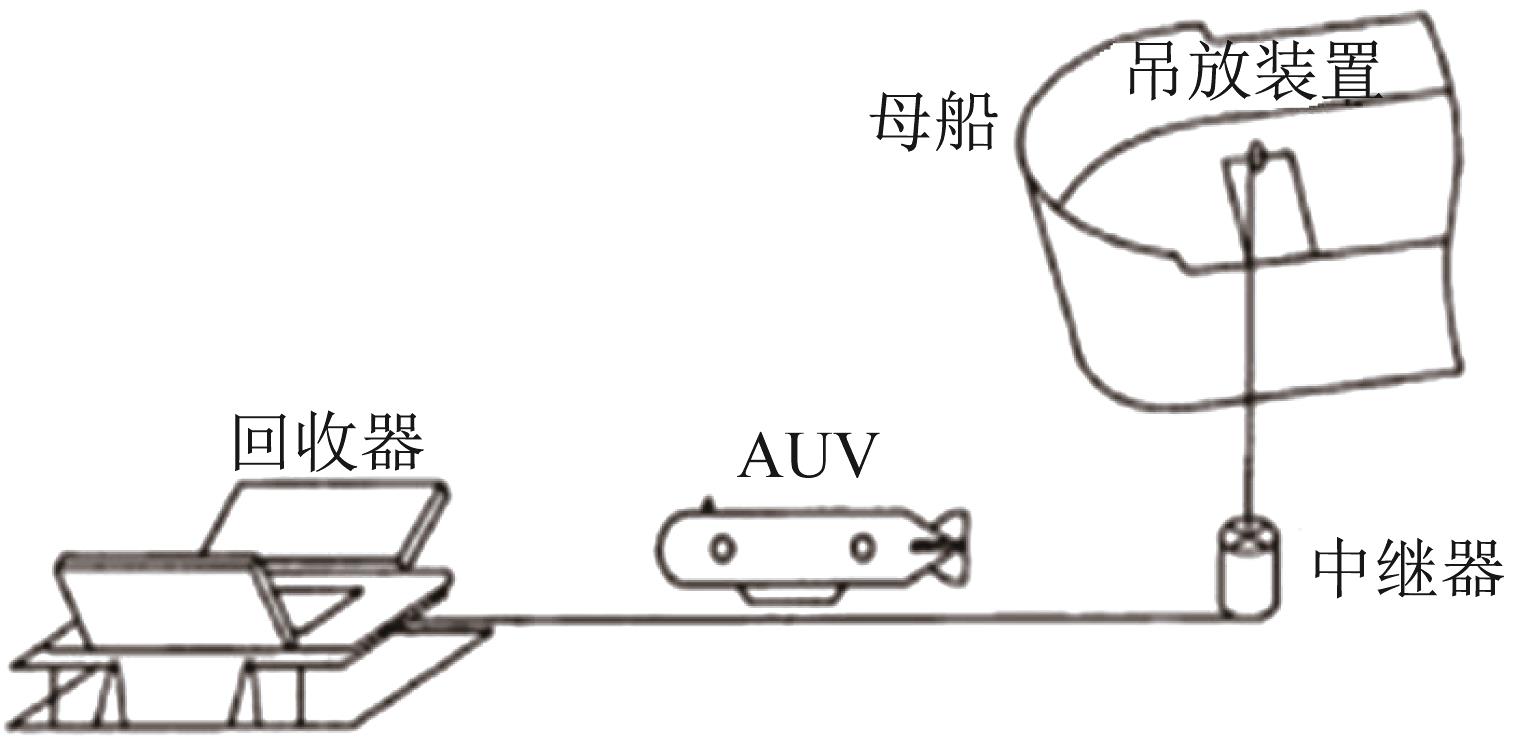
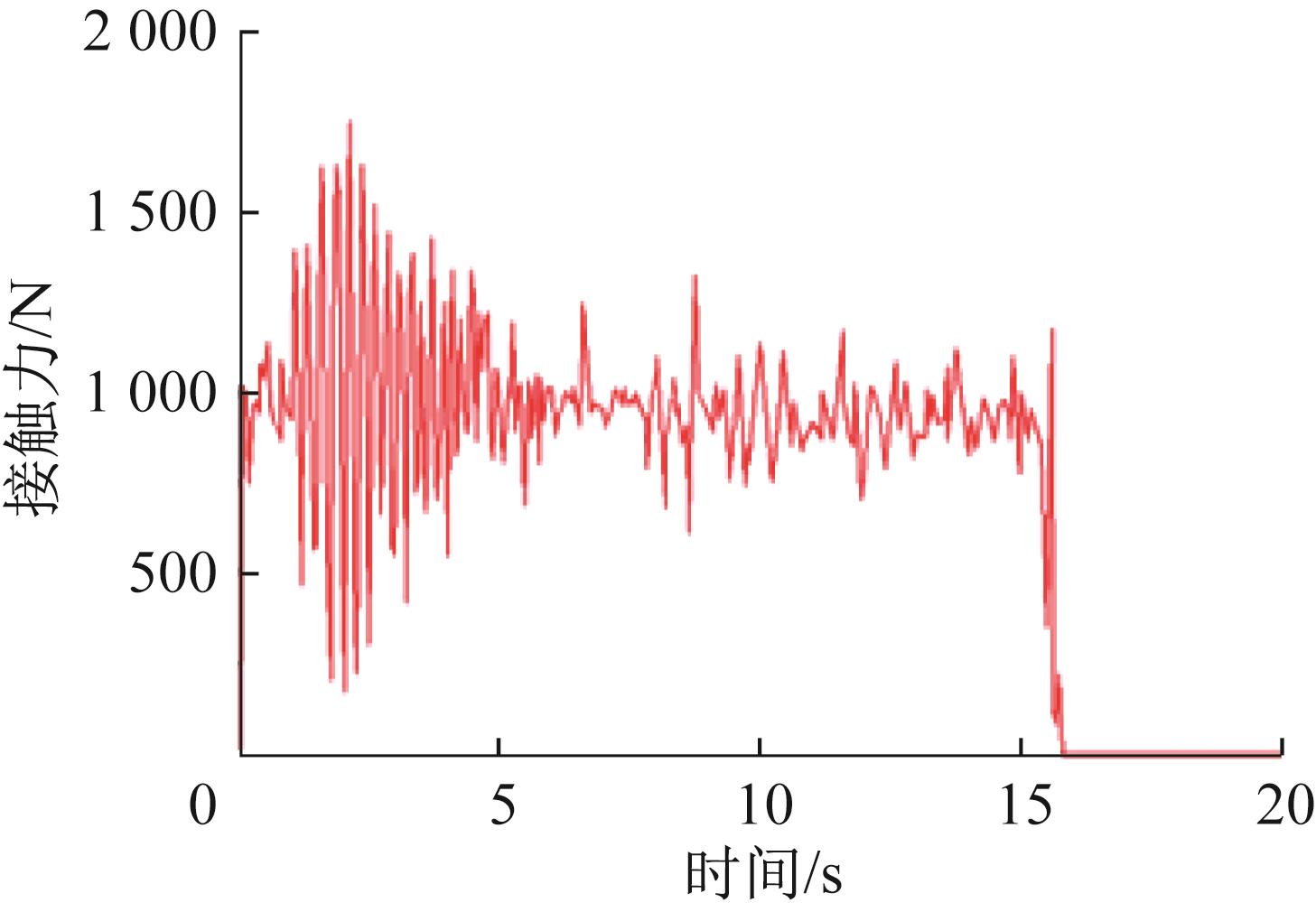
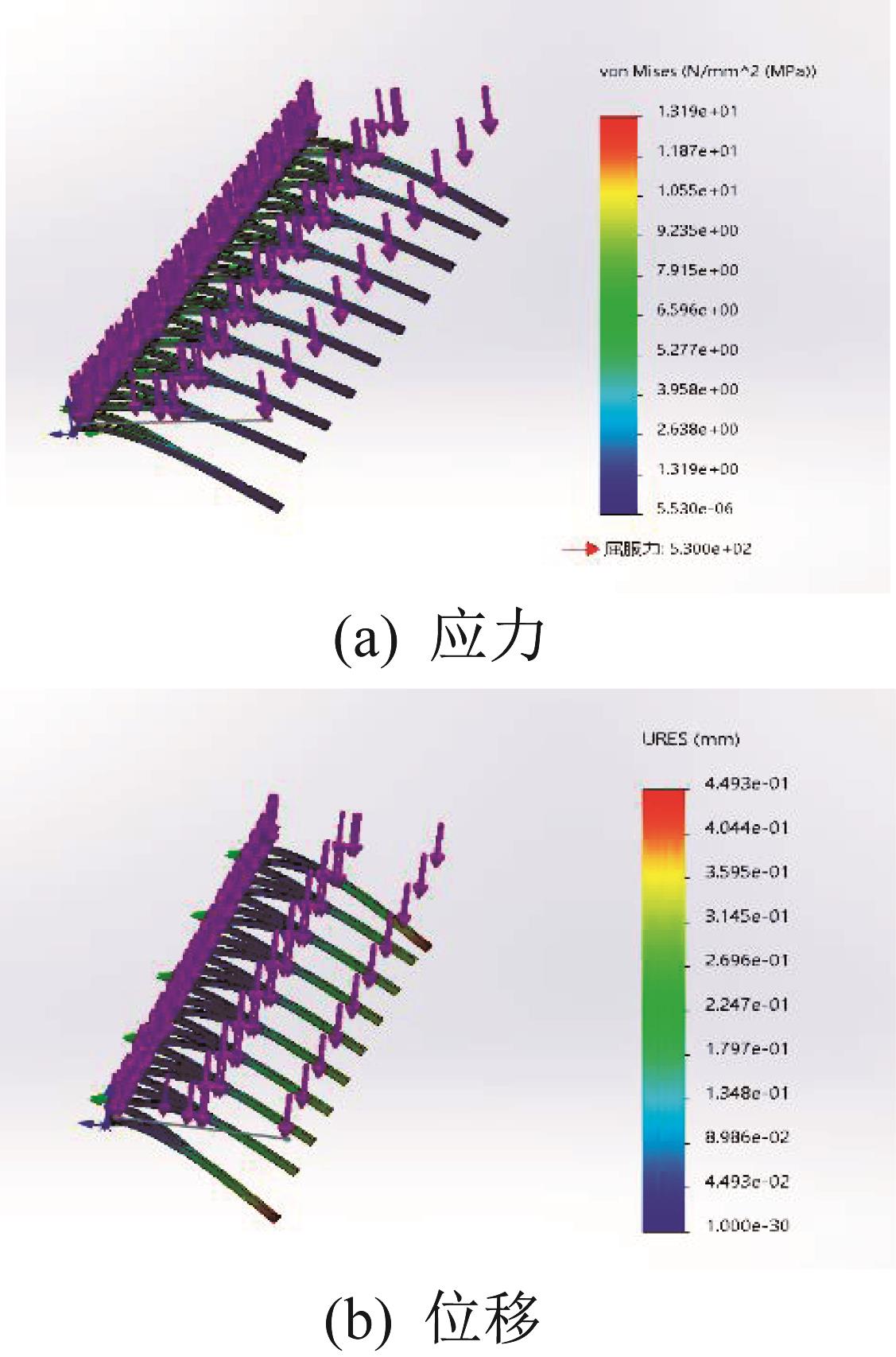
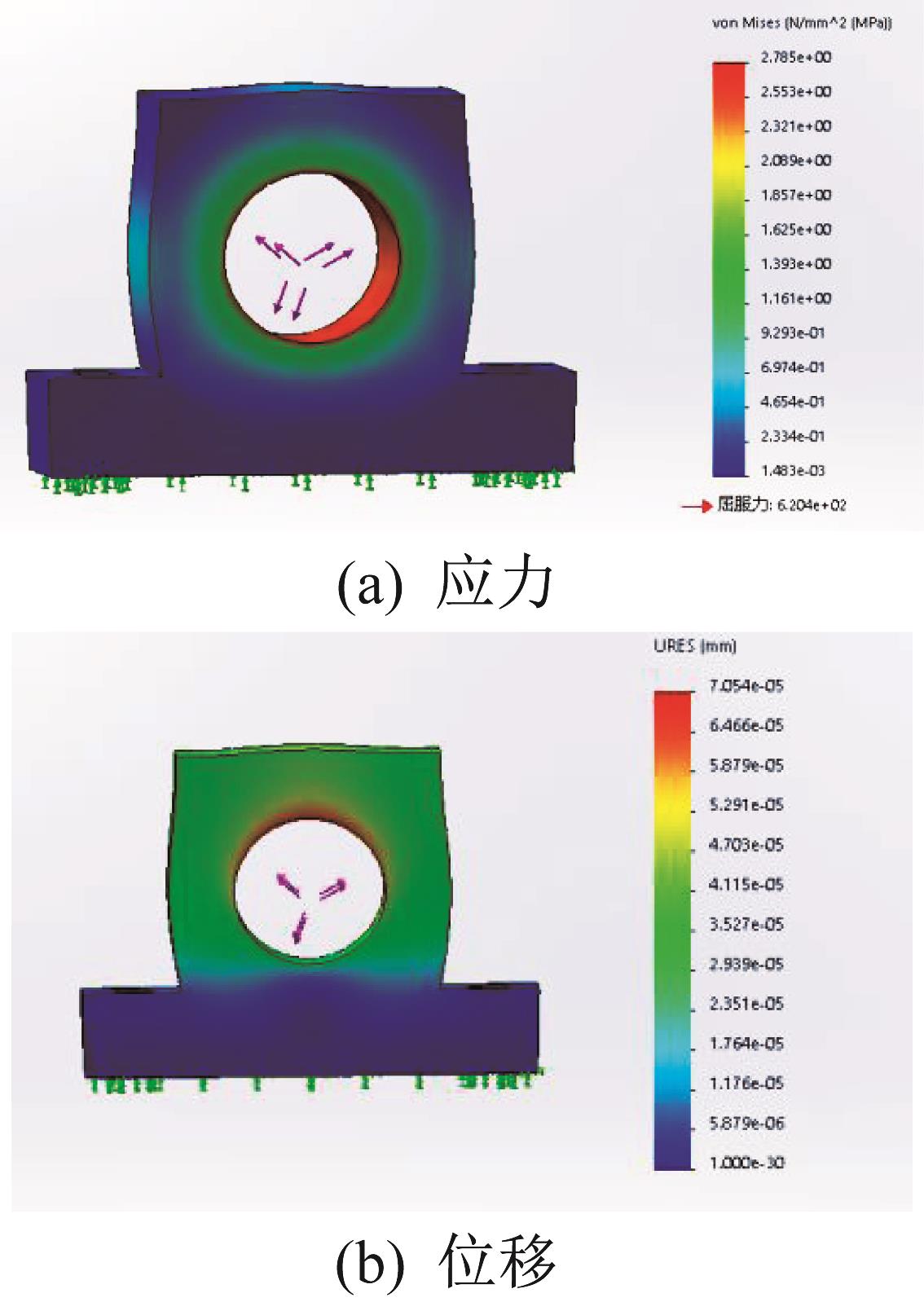
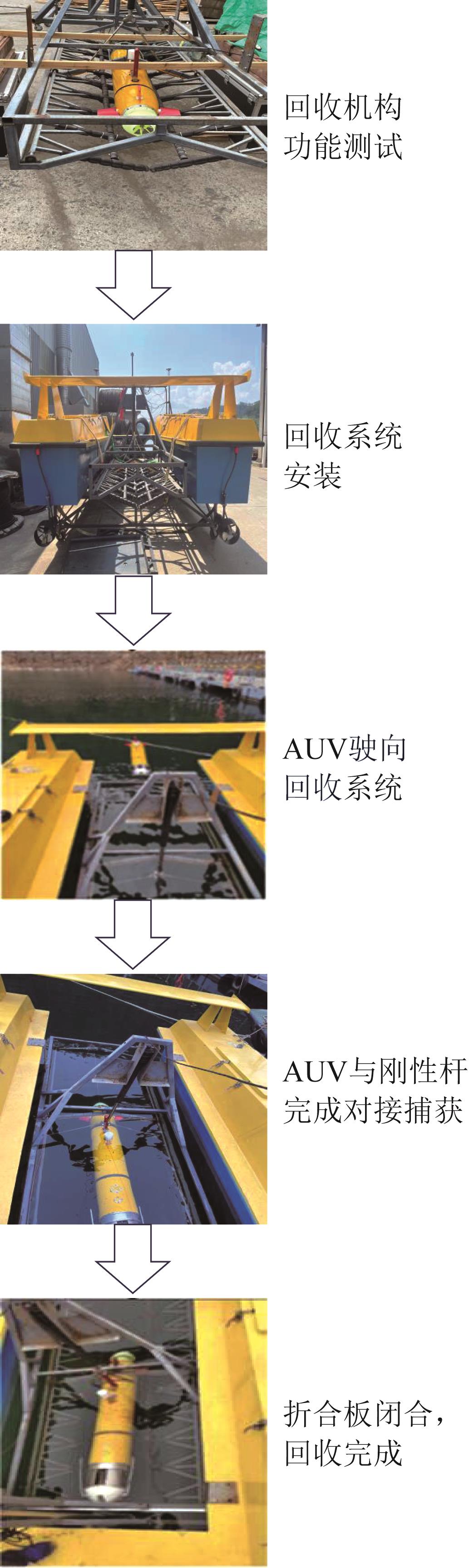
Abstract In order to solve the problems of low automation level, low work efficiency and high risk when launching and recovering autonomous underwater vehicle (AUV), an launch and recovery system (LARS) for AUV based on unmanned surface vessel (USV) was developed. Firstly, by analyzing commonly used AUV launch and recovery modes and LARS at home and aboard, an AUV LARS was designed, and its working principle was analyzed; secondly, the dynamics, statics and contact collision issues of the LARS were studied from the perspectives of mechanical analysis and numerical simulation; finally, a principle prototype of the system was built and land and lake experiments were conducted. The experiments verified that the designed LARS was stable, reliable, easy to operate, and had good universality, which could effectively improve the efficiency of autonomous launch and recovery of AUV. The designed AUV LARS based on USV has good application prospects.
|
|
Received: 26 January 2023
Published: 03 November 2023
|
|
|
|
Corresponding Authors:
Lingshuai MENG
E-mail: 1520607043@qq.com;menglingshuai@sia.cn
|
基于 USV的 AUV布放回收系统设计与实现
为了解决目前布放回收自主水下机器人(autonomous underwater vehicle,AUV)自动化水平低、工作效率低、危险性高等问题,研制了一款基于无人水面船(unmanned surface vessel,USV)的AUV自主布放回收系统。首先,通过分析国内外常用AUV布放回收方式和布放回收系统,设计了AUV布放回收系统,并对其工作原理进行分析;其次,分别从力学分析、数值仿真等角度研究了布放回收系统的动力学、静力学及接触碰撞问题;最后,搭建了系统原理样机并进行了陆上实验和湖上实验,通过实验验证了所设计的布放回收系统稳定可靠、操作简单、通用性好,可以有效提高AUV自主布放回收的效率。所设计的基于USV的AUV布放回收系统具有良好的应用前景。
关键词:
自主水下机器人,
布放回收系统,
结构设计,
力学分析,
湖上测试
|
|
| [1] |
BIAN X Q, YAN Z P, CHEN T, et al. Mission management and control of BSA-AUV for ocean survey[J]. Ocean Engineering, 2012, 55( 6): 161- 174.
|
|
|
| [2] |
YAN Z P, YU H M, ZHANG W, et al. Globally finite-time stable tracking control of underactuated UUVs[J]. Ocean Engineering, 2015, 107( 7): 132- 146.
|
|
|
| [3] |
吴泽伟, 吴晓锋, 杜虎. 水下特种运载器水下回收方式[J]. 火力与指挥控制, 2016, 41( 5): 28- 31. doi: 10.3969/j.issn.1002-0640.2016.02.008
WU Z W, WU X F, DU H. Research on the underwater recovery manner for underwater special vehicles[J]. Fire Control and Command Control, 2016, 41( 5): 28- 31.
doi: 10.3969/j.issn.1002-0640.2016.02.008
|
|
|
| [4] |
SARDA E I, DHANAK M R. Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle[J]. IEEE Journal of Oceanic Engineering, 2019, 44( 2): 290- 299.
|
|
|
| [5] |
PAGE B R, LAMBERT R, CHAVEZ G J, et al. Underwater docking approach and homing to enable persistent operation[J]. Frontiers in Robotics and AI, 2021, 8: 621755.
|
|
|
| [6] |
MENG L S, LIN Y, GU H T, et al. Study on the mechanical characteristics of an underwater towing system for recycling an autonomous underwater vehicle (AUV)[J]. Ocean Research, 2018, 79( 7): 123- 133.
|
|
|
| [7] |
SARDA E, DHANAK M. Unmanned recovery of an AUV from a surface platform manuscript[C]// Oceans '13 MTS/IEEE, San Diego, September 23-26, 2013.
|
|
|
| [8] |
MCEWEN R S, HOBSON B W, MCBRIDE L, et al. Docking control system for a 54-cm-diameter (21-in) AUV[J]. IEEE Journal of Oceanic Engineering, 2008, 33( 4): 550- 562.
|
|
|
| [9] |
曾永. UUV布放回收技术[J]. 水雷战与舰船防护, 2015, 23( 1): 13- 16.
ZENG Y. UUV deployment recycling technology[J]. Mine Warfare & Ship Self-Defence, 2015, 23( 1): 13- 16.
|
|
|
| [10] |
WEI Z, JIA Z, YAN Z P, et al. Leader-following consensus of discrete-time multi-AUV recovery system with time-varying delay[J]. Ocean Engineering, 2021, 219: 108258.
|
|
|
| [11] |
辛传龙. 基于USV的AUV对接回收系统设计与动力学特性研究[D]. 沈阳: 中国科学院沈阳自动化研究所, 2021.
XIN C L. Design and dynamic characteristics study of AUV recovery docking system based on USV[D]. Shenyang: Chinese Academy of Sciences, Shenyang Institute of Automation, 2021.
|
|
|
| [12] |
BAKER P. AUV launch and recovery: A key enabling technology for organic MCM Operations[J]. Engineers Australia, 2013: 190- 199.
|
|
|
| [13] |
WIGLEY R, PROCTOR A A, SIMPSON B. Novel AUV launch, recovery new approaches using combined USV-AUV method[J]. Sea Technology Worldwide Information Leader for Marine Business Science & Engineering, 2018, 59( 6): 24- 27.
|
|
|
| [14] |
燕奎臣, 吴利红. AUV水下对接关键技术研究[J]. 机器人, 2007, 29( 3): 267- 273. doi: 10.3321/j.issn:1002-0446.2007.03.014
YAN K C, WU L H. A survey on the key technologies for underwater AUV docking[J]. Robot, 2007, 29( 3): 267- 273.
doi: 10.3321/j.issn:1002-0446.2007.03.014
|
|
|
| [15] |
ALLEN B, AUSTIN T, FORRESTER N, et al. Au-tonomous docking demonstrations with enhanced REMUS technology[J]. Oceans, 2006, 18( 21): 1- 6.
|
|
|
| [16] |
KAWASAKI T, NOGUCHI T, FUKASAWA T, et al. Marine bird, a new experimental AUV-results of docking and electric power supply tests in sea trials[J]. Oceans, 2004, 3: 1738- 1744.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|