| Robotic and Mechanism Design |
|

|
|
|
| Design of new water-cooled wall robot and research of its electro permanent magnet wheel |
Boyang ZHANG1( ),Yongli FENG1,2(),Jinfeng HUANG1,2,Baowang HUANG1,2 ),Yongli FENG1,2(),Jinfeng HUANG1,2,Baowang HUANG1,2 |
1.School of Mechanical Engineering, North China University of Science and Technology, Tangshan 063000, China
2.Industry and Technology Research Institute of Industrial Robot in Hebei, Tangshan 063000, China |
|
|
|
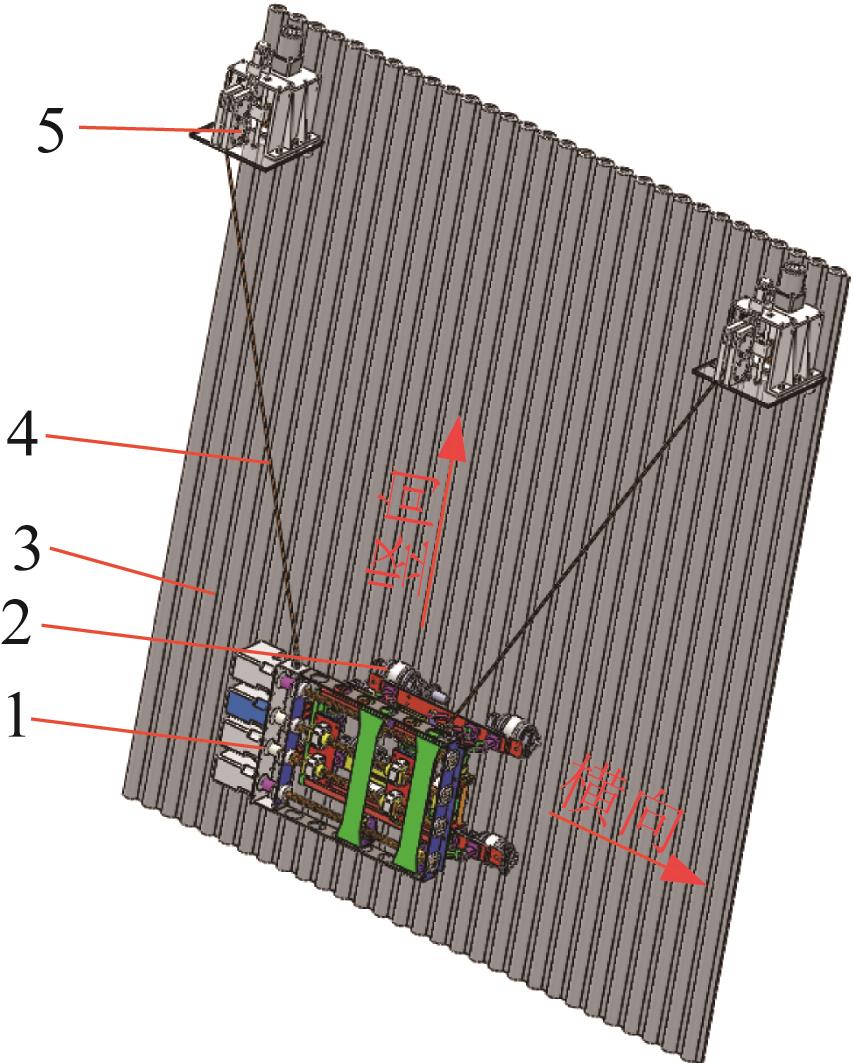
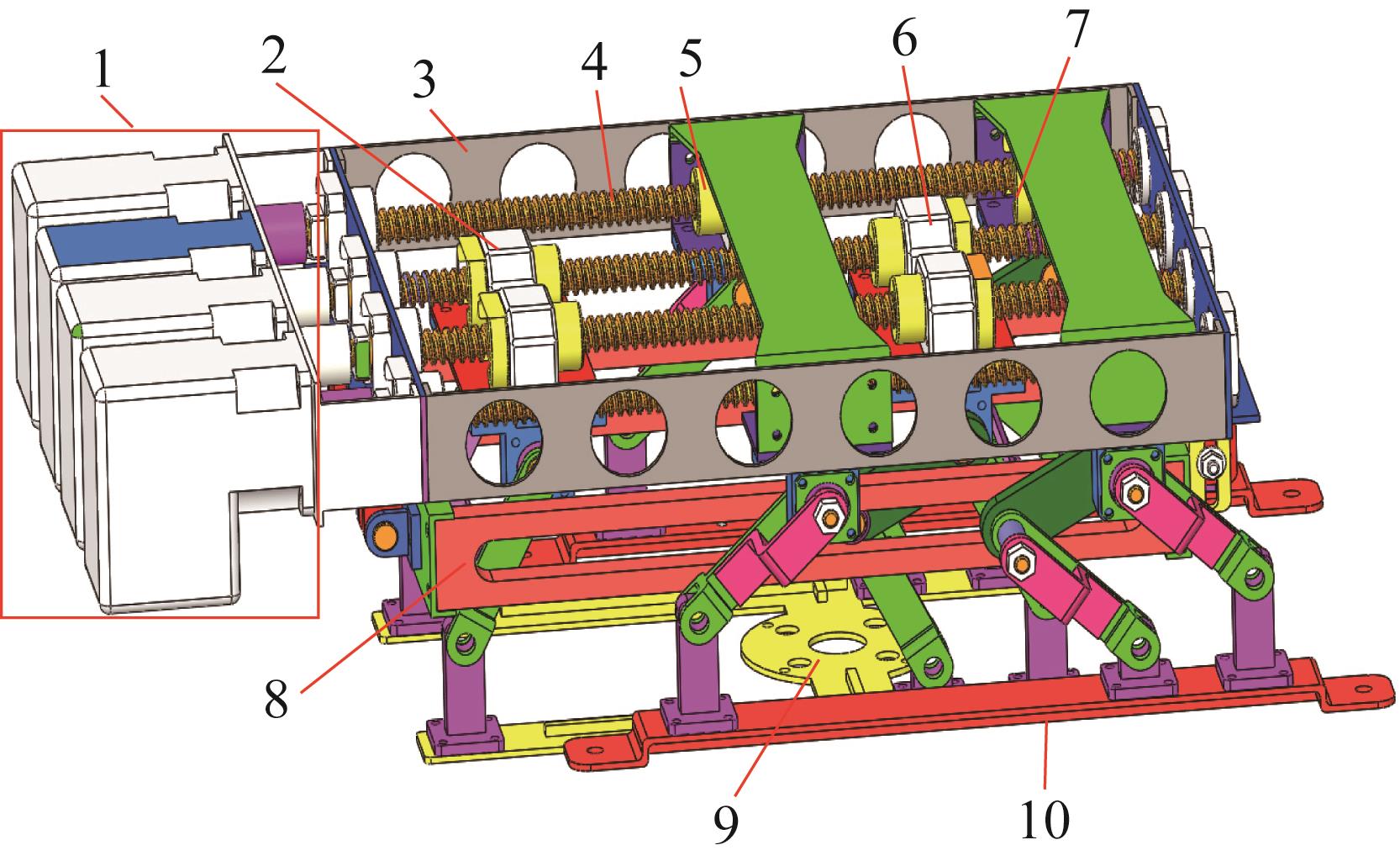
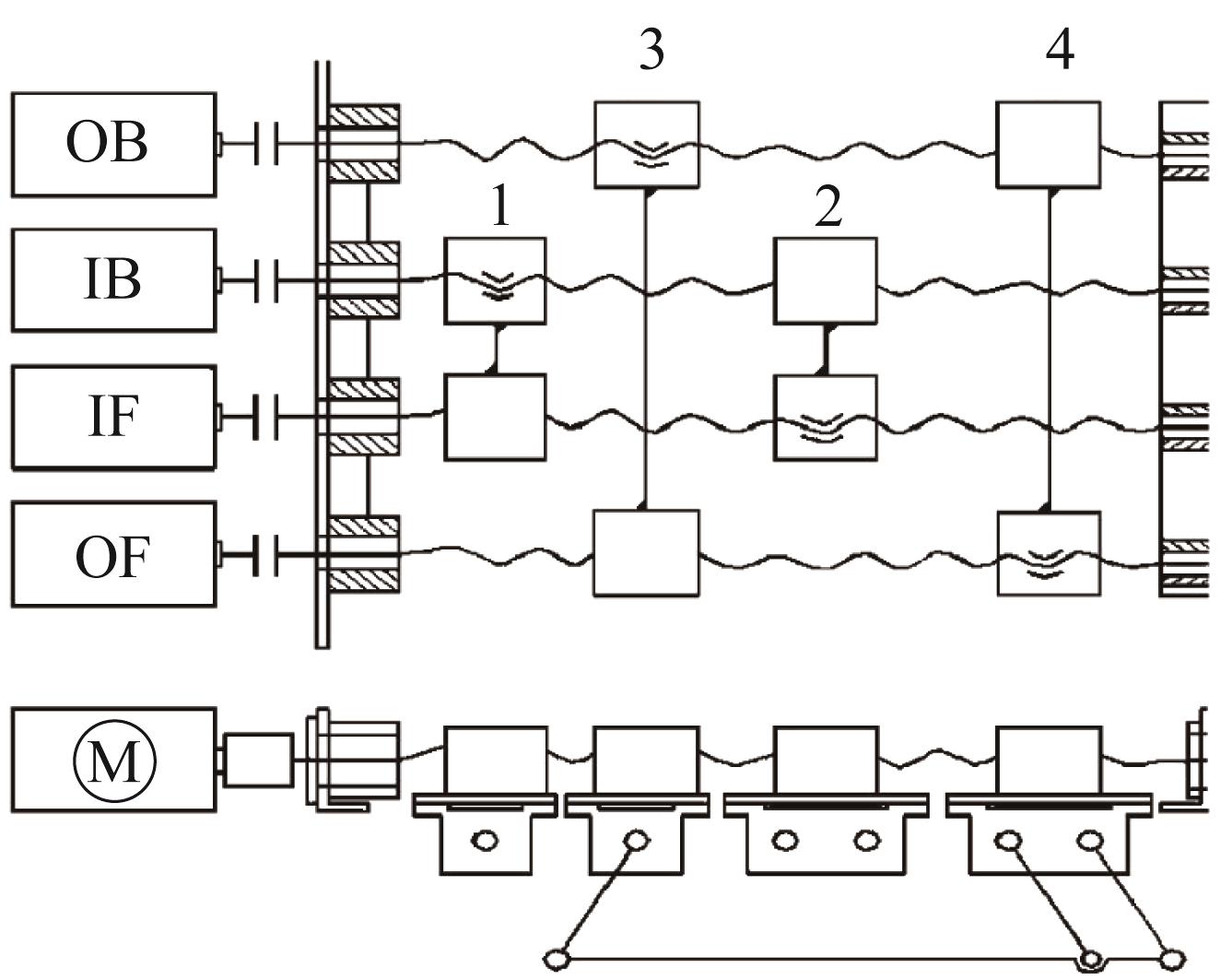
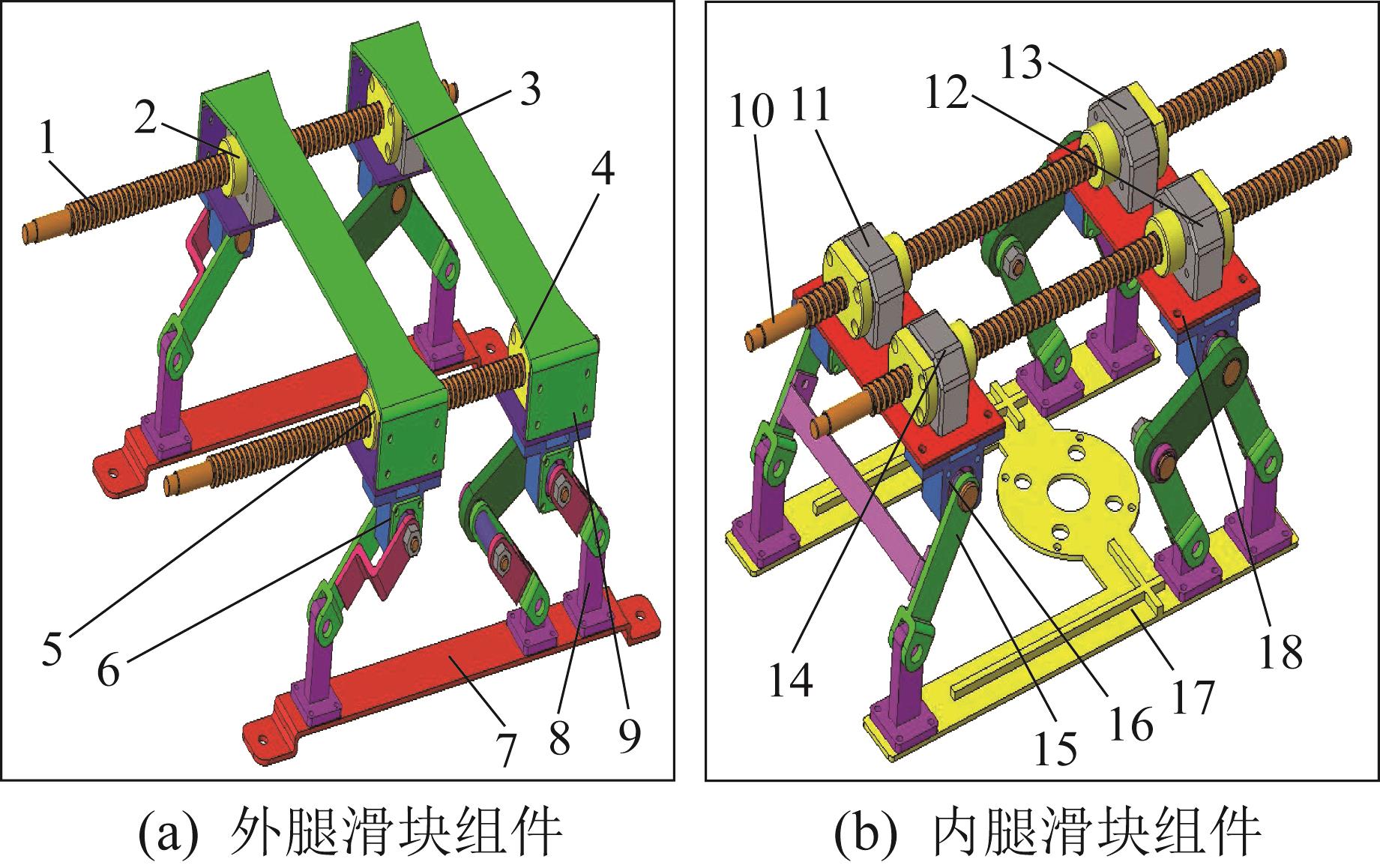
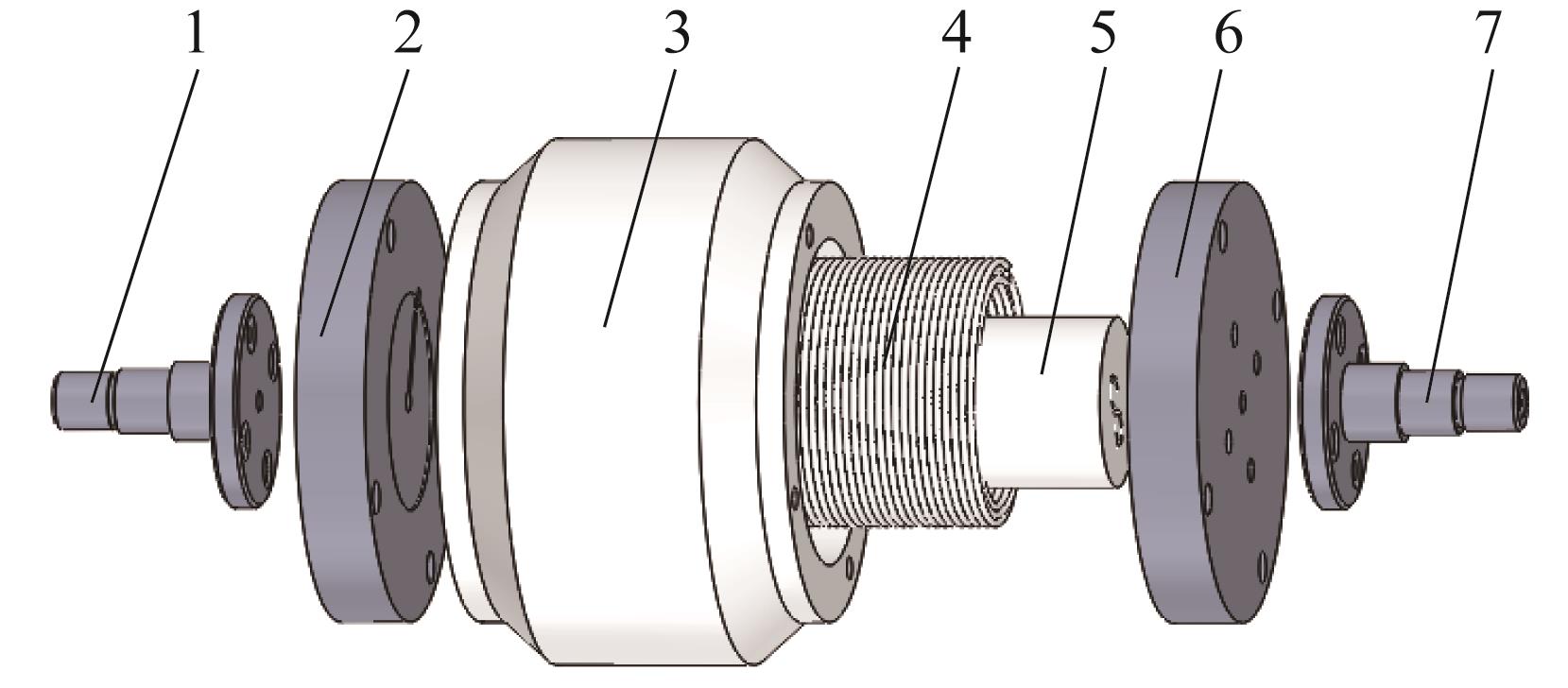
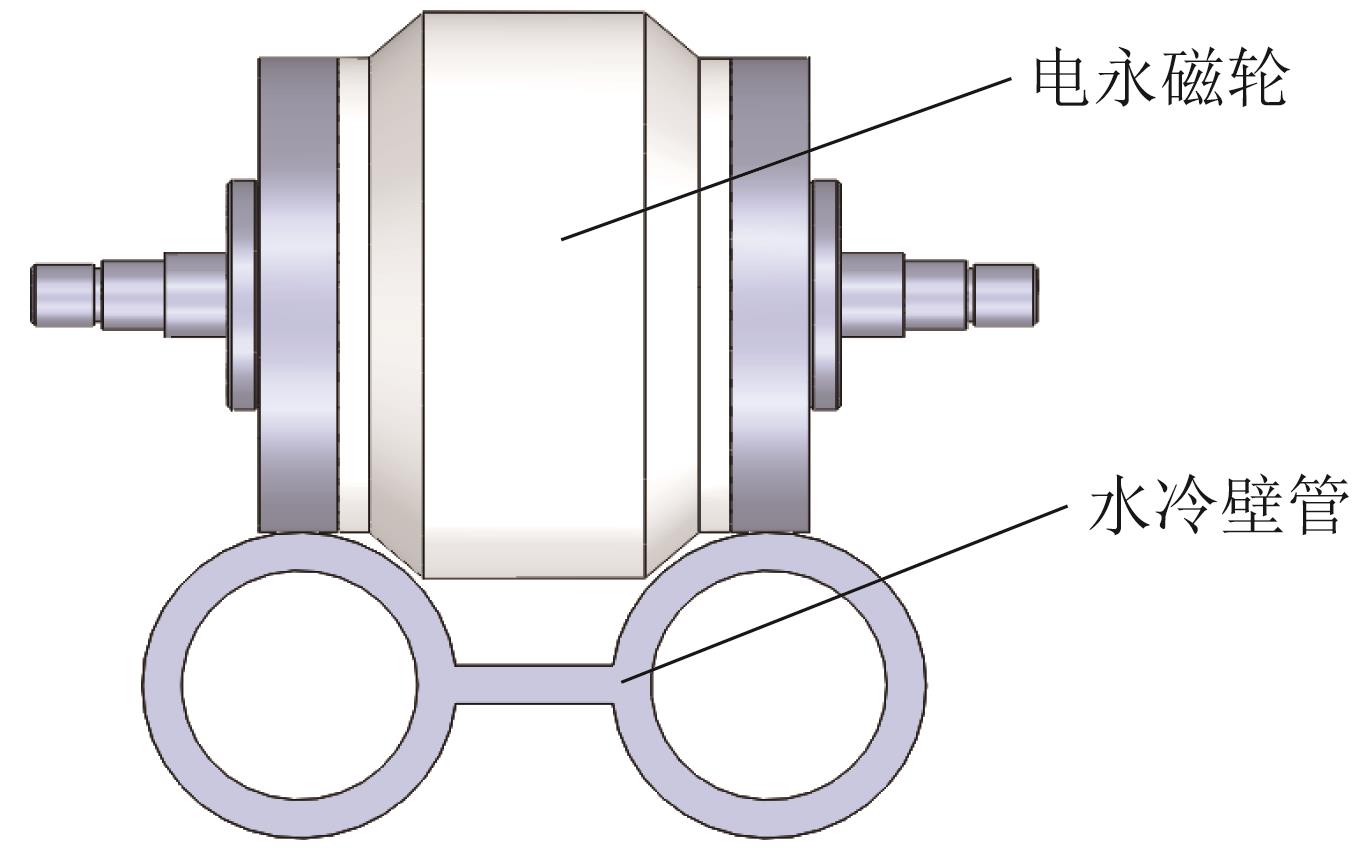
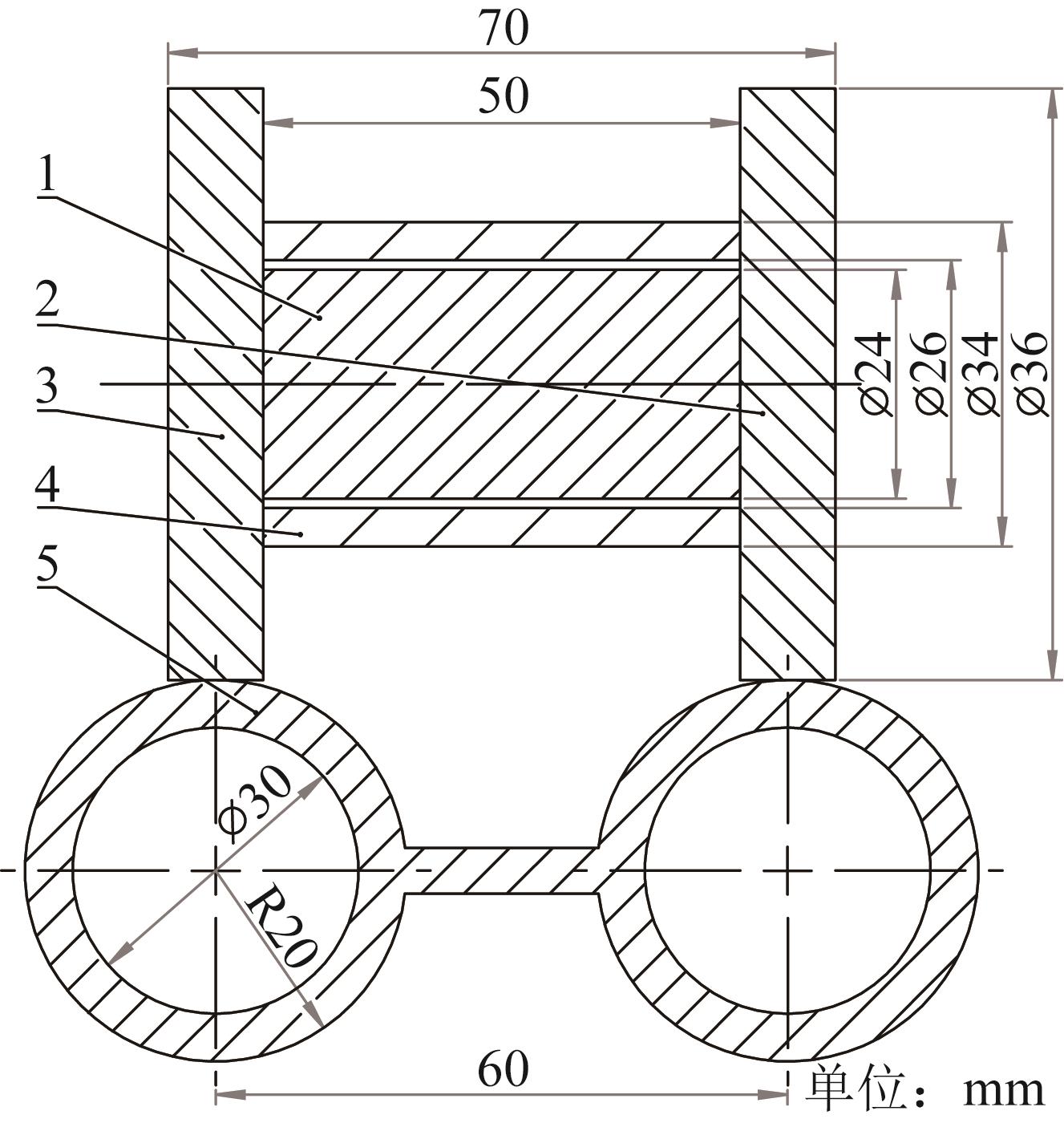
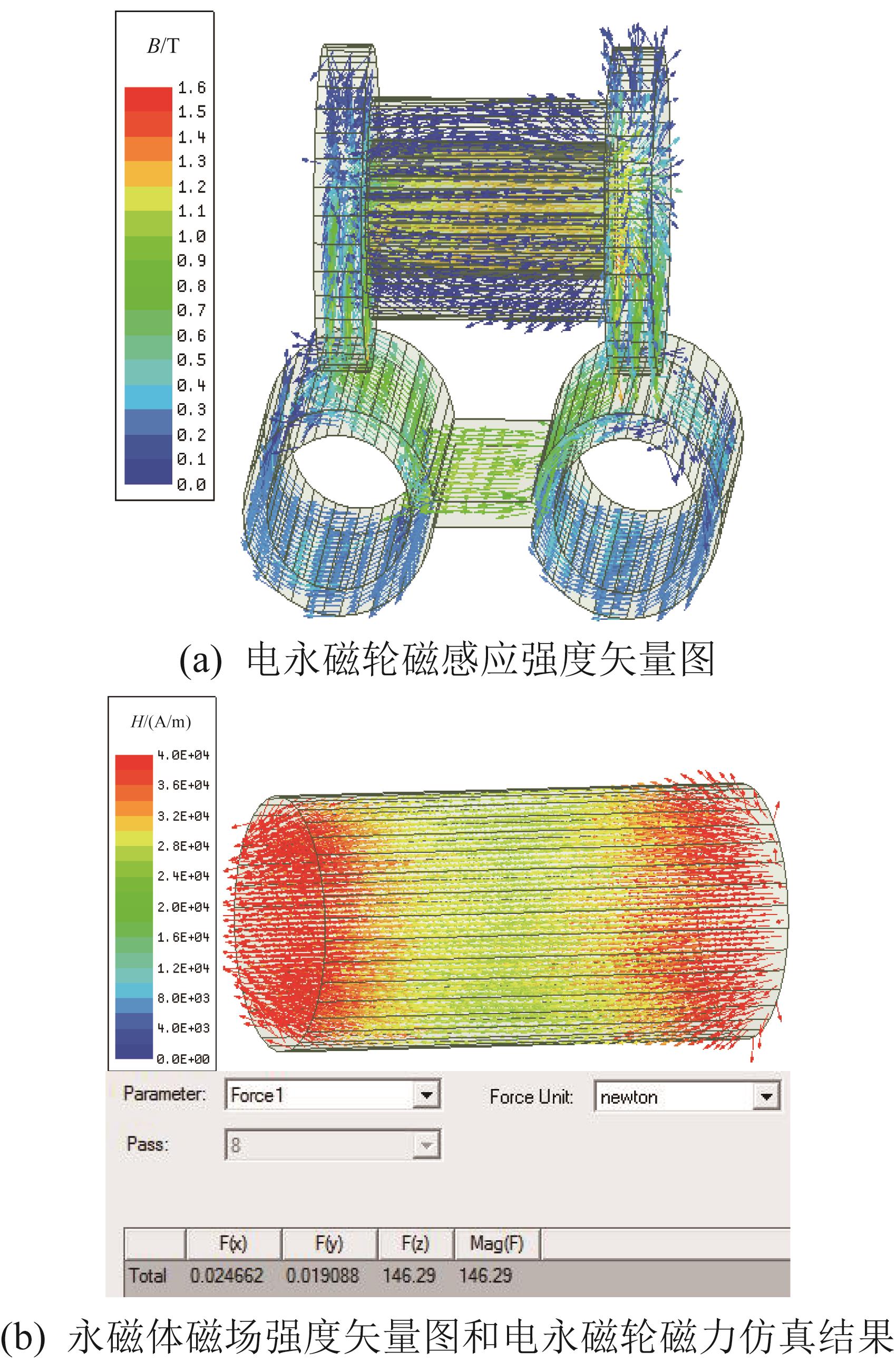
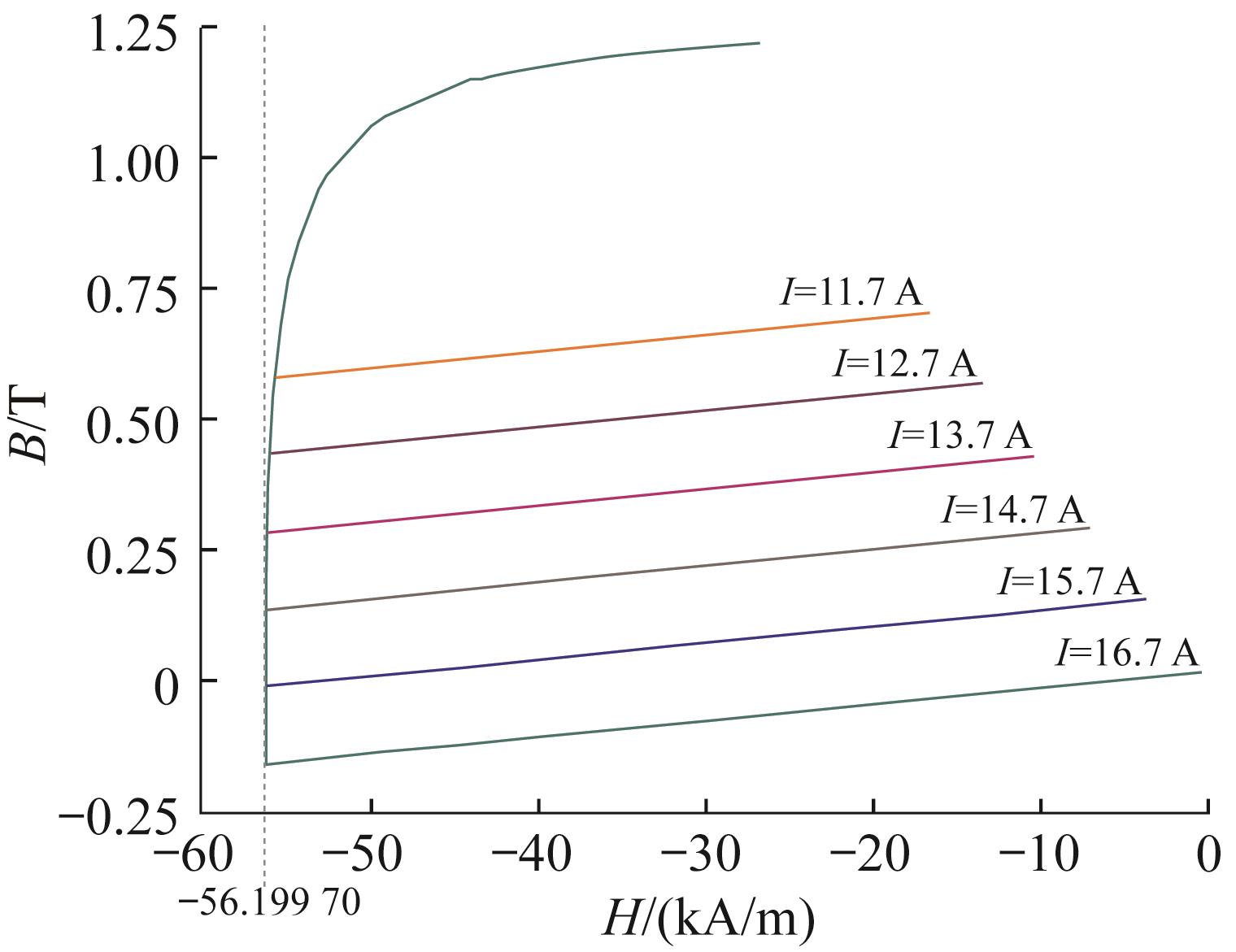
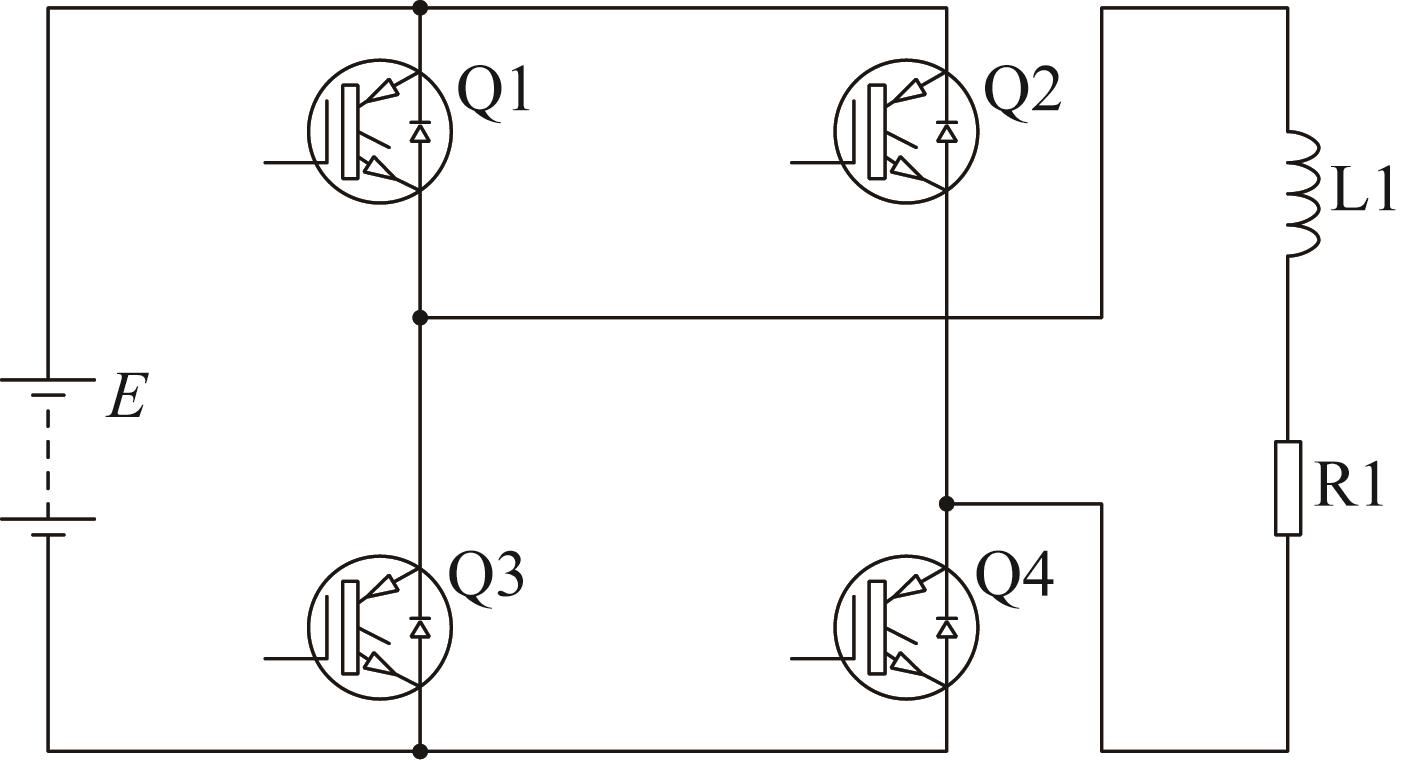
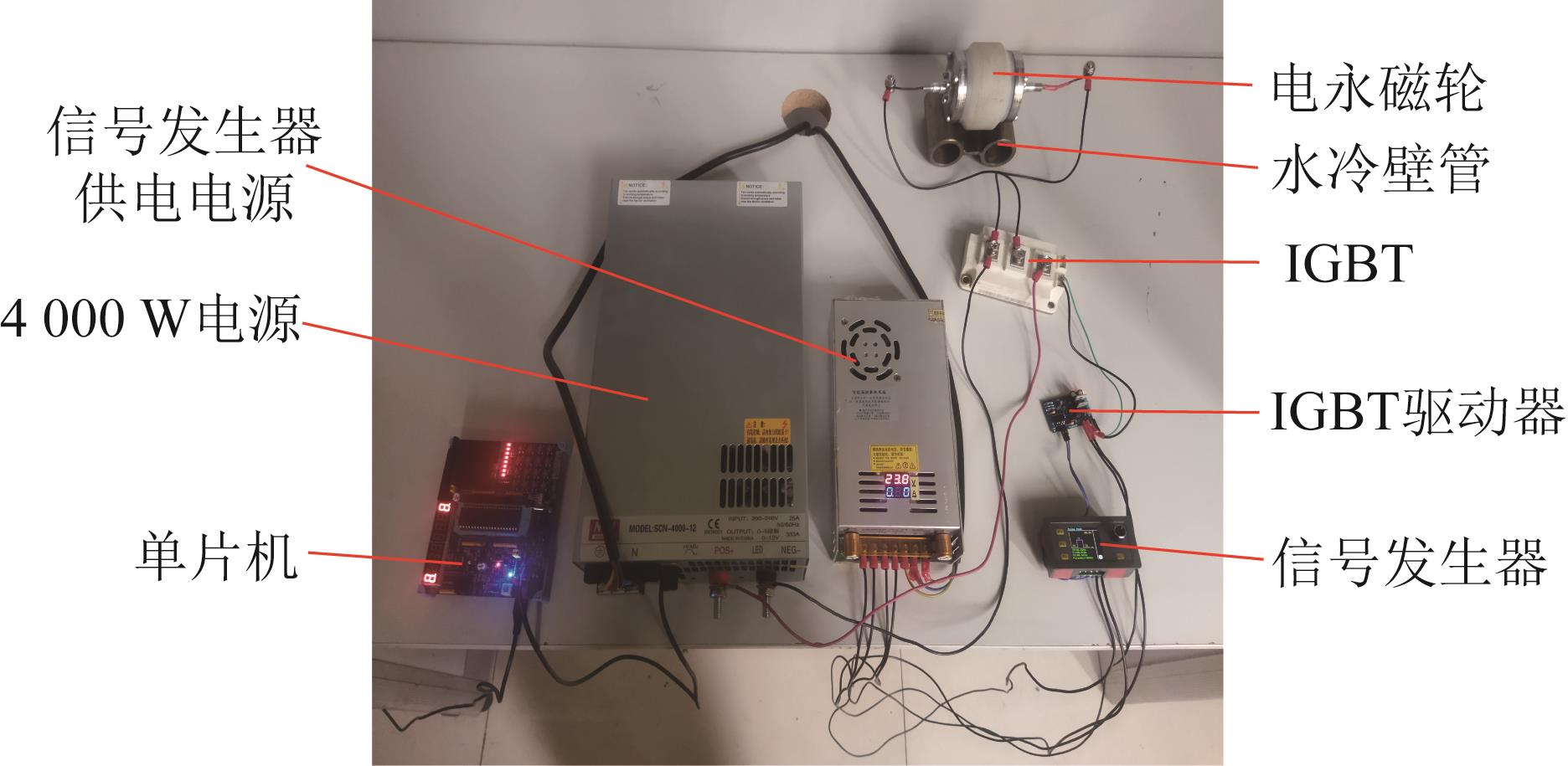
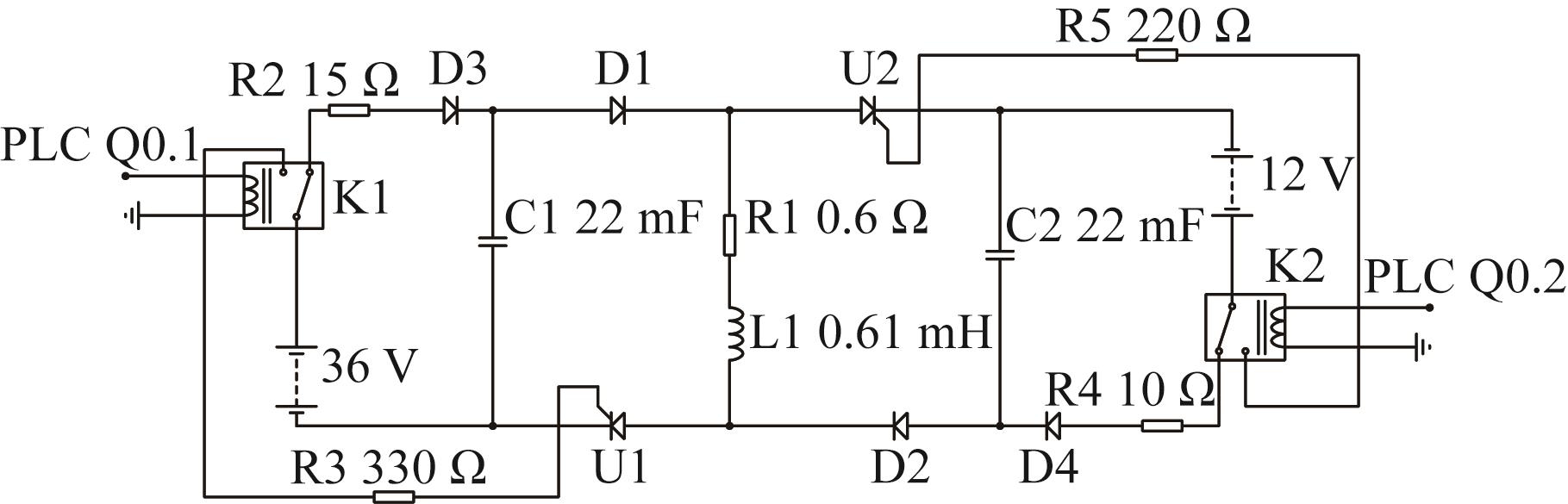
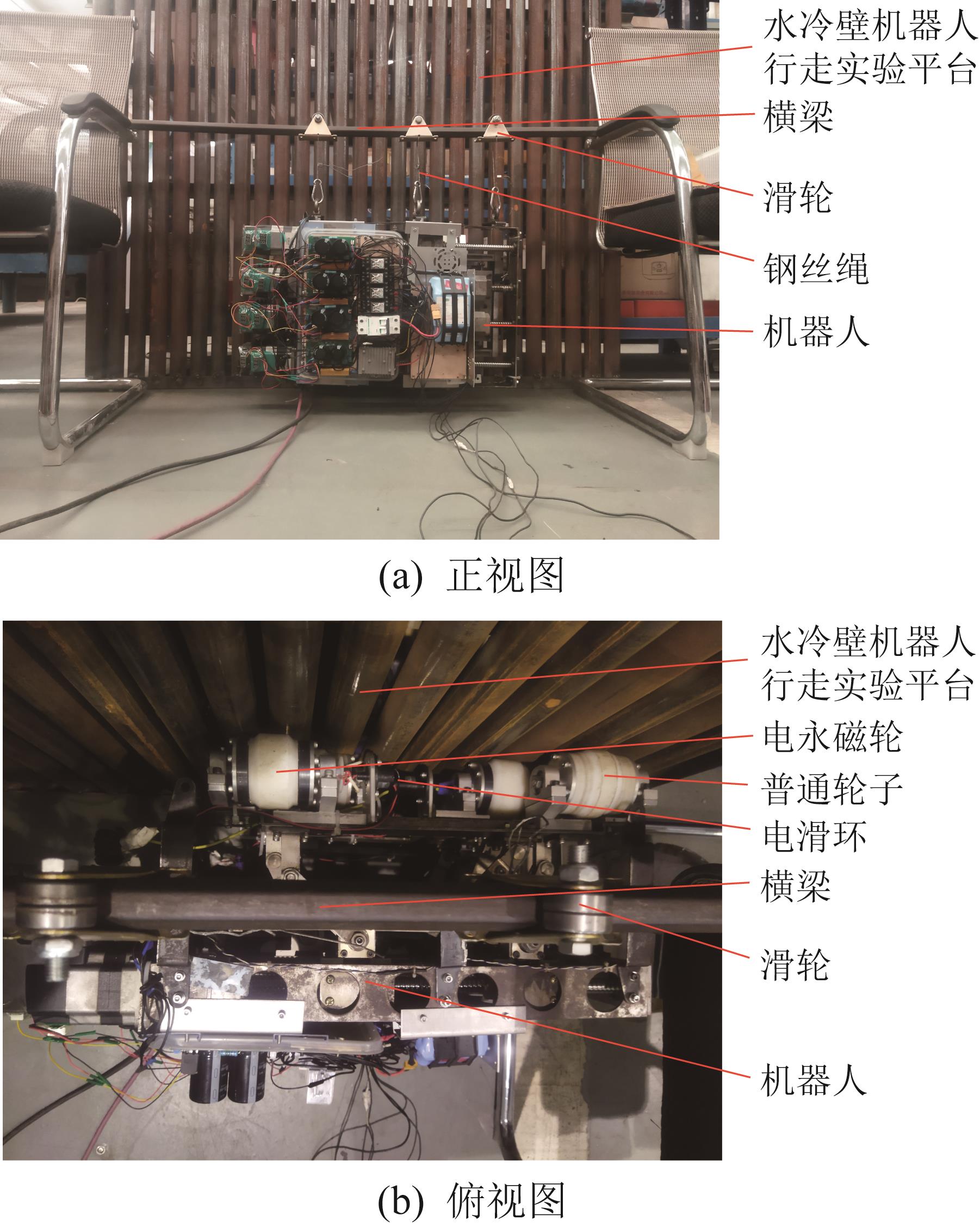
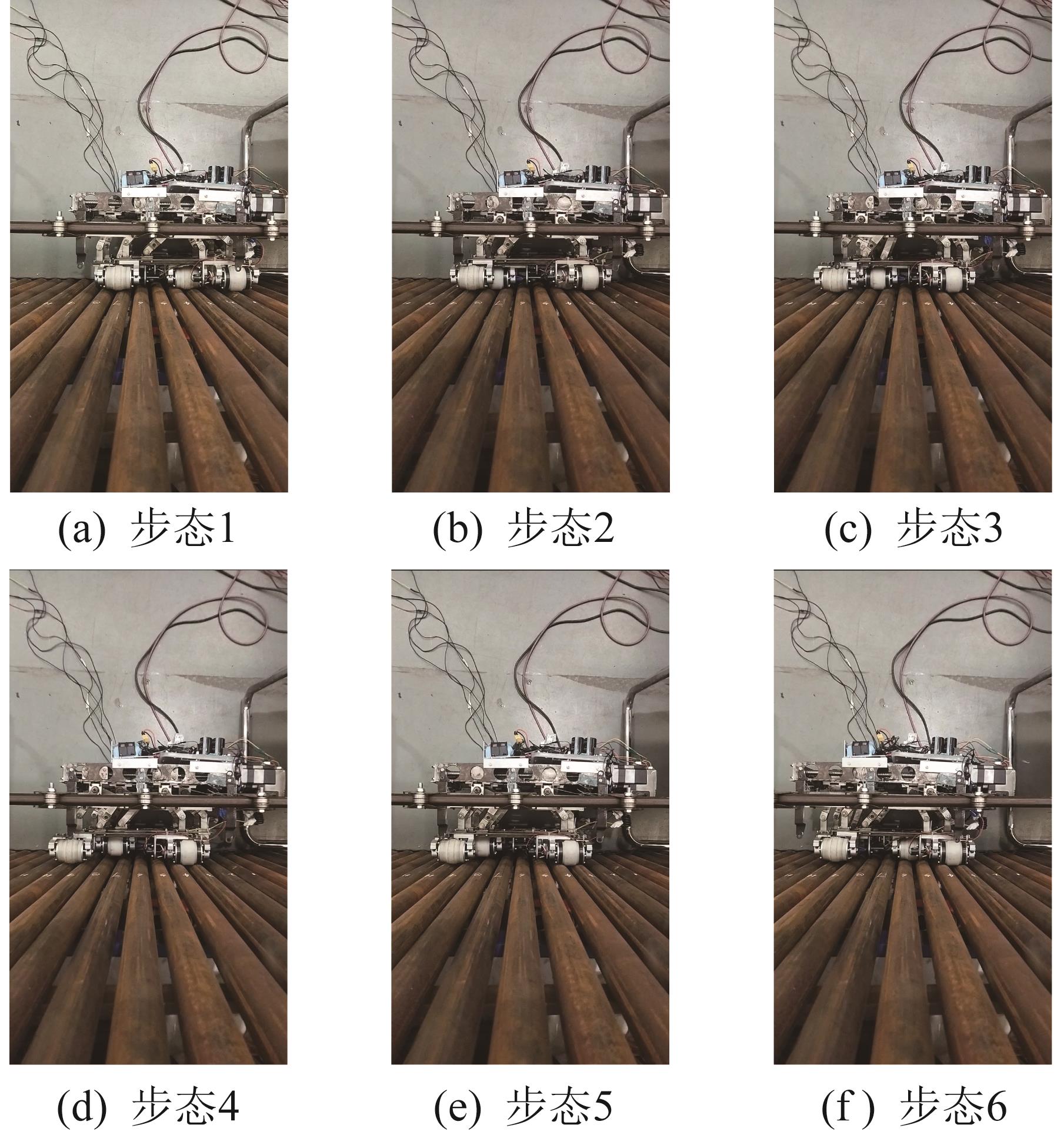
Abstract The water-cooled wall of boiler in thermal power plants needs to be inspected and cleaned regularly. Using water-cooled wall robot can improve the efficiency of inspection and cleaning. In view of the complex working environment of water-cooled wall, a new type of water-cooled wall robot was developed. The robot structure and working principle were introduced. In order to ensure the robot to move flexibly and have reliable suction on the water wall, an electric permanent magnet wheel was designed. Through Maxwell simulation and experiment, the current excitation required to magnetize/demagnetize the electric permanent magnet wheel and wheel suction were obtained, and the electric permanent magnet wheel magnetize/demagnetization circuit was designed. The control system of the robot body was introduced, and the experimental platform for lateral walking of the robot was built to verify the cooperation and stability of the robot motion. The experimental results showed that the inner and outer legs of the robot could adsorb and move forward alternately, and realize the gait of lifting, stepping and dropping legs, and the movement was stable. The magnetic force was produced when the robot droped its legs and disappeared when it lifted its legs. The robot had both adsorption stability and movement flexibility. The electric permanent magnet wheel had simple structure, small size, small mass, less power consumption, and could provide about 150 N suction. The research results provide a reference for the application of wall-climbing robot in the cleaning and detection of water-cooled walls.
|
|
Received: 01 November 2023
Published: 26 August 2024
|
|
|
|
Corresponding Authors:
Yongli FENG
E-mail: 2714981237@qq.com;fengyongli@ncst.edu.cn
|
新型水冷壁机器人设计及其电永磁轮研究
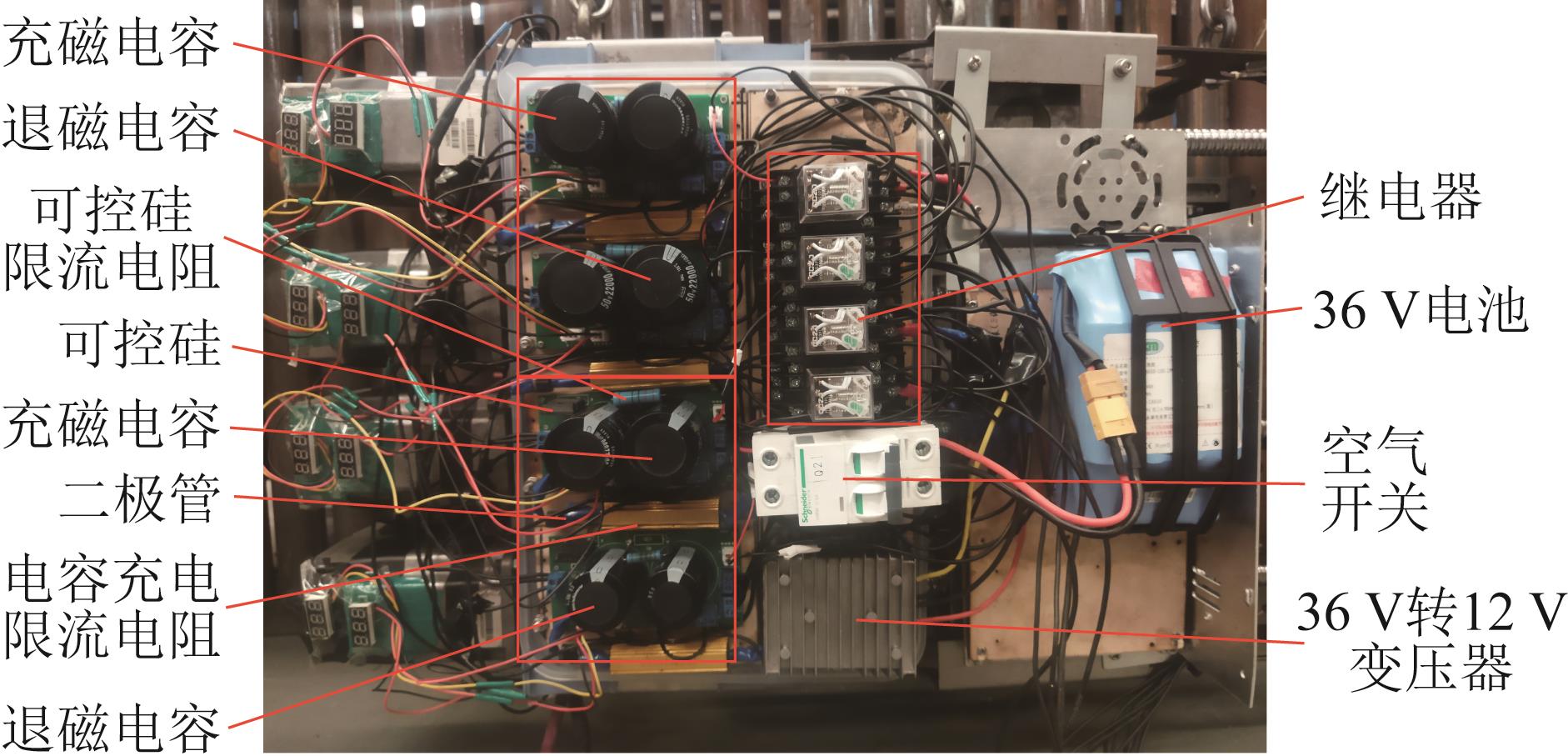
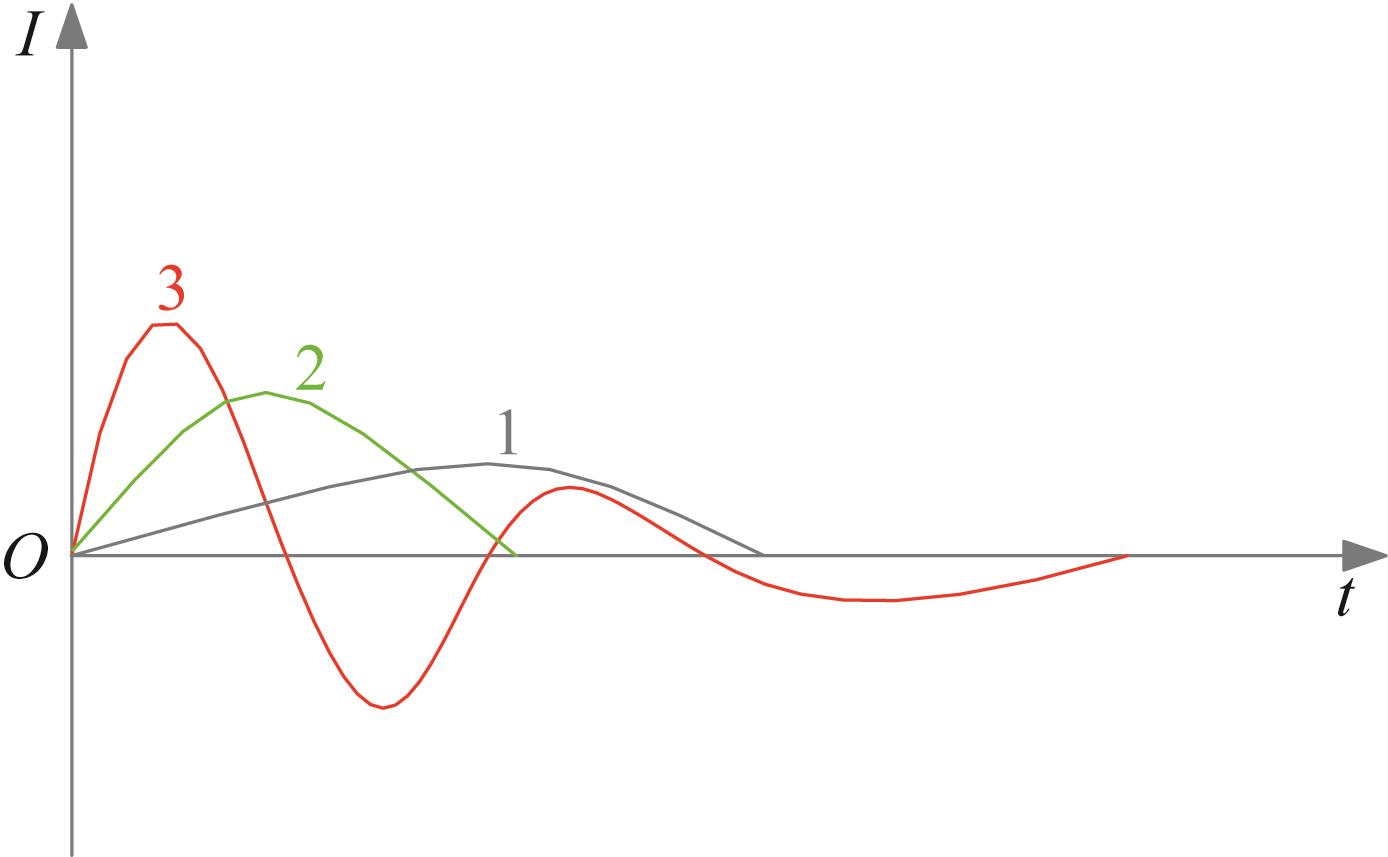
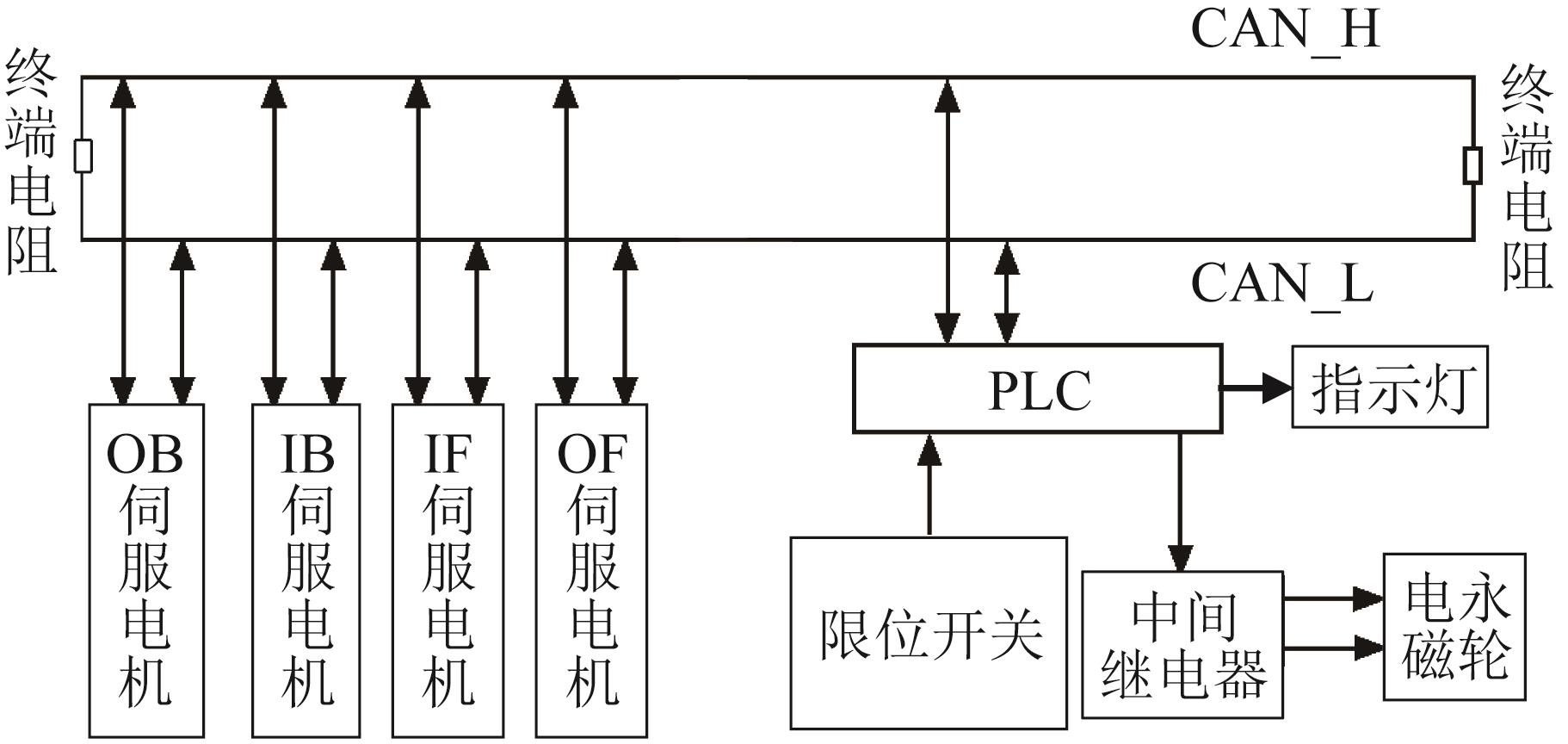
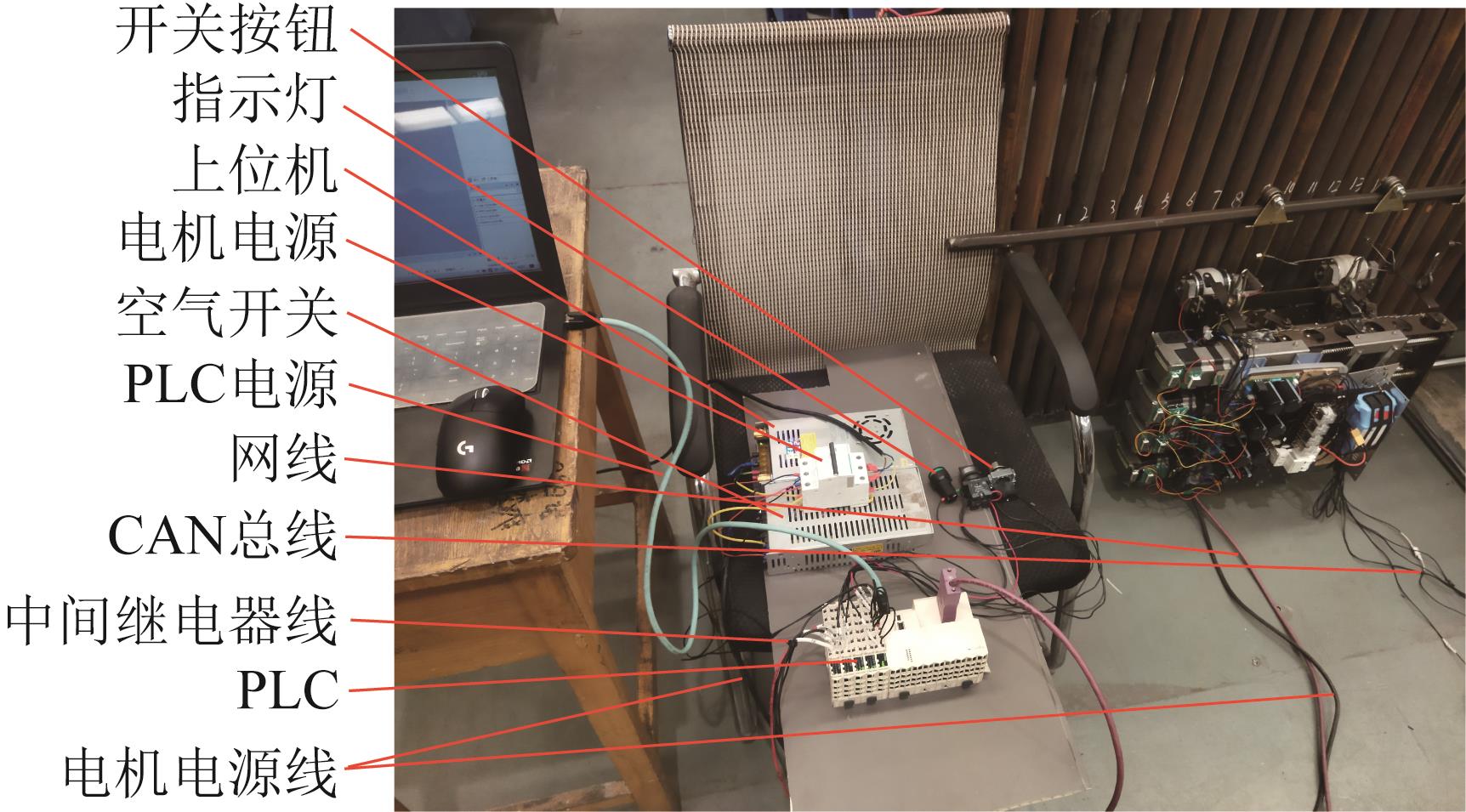
火力发电厂的锅炉水冷壁需要定期检测和清扫,采用水冷壁机器人可以提高检测和清扫的效率。针对水冷壁面复杂的工作环境,研发了一种新型水冷壁机器人。对机器人的结构和工作原理进行了介绍;为了保证机器人在水冷壁面运动灵活且有可靠的吸力,设计了一款电永磁轮;通过Maxwell仿真并结合实验得出了使电永磁轮充/退磁所需的电流激励以及轮子吸力,设计了电永磁轮充/退磁电路;介绍了机器人本体的控制系统,搭建了机器人横向行走实验平台,对机器人运动的协同性和稳定性进行了验证。实验结果表明:机器人内、外腿依次交替吸附并前移,实现了抬腿、迈步、落腿等步态,运动稳定;机器人落腿时磁力产生,抬腿时磁力消失,机器人兼具吸附稳定性和运动灵活性;电永磁轮结构简单,体积小,质量小,耗电少,可提供150 N左右的吸力。研究结果为爬壁机器人在水冷壁清扫和检测中的应用提供了参考。
关键词:
水冷壁机器人,
电永磁,
磁吸力,
充/退磁电路
|
|
| [1] |
孙连启. 循环流化床锅炉水冷壁的磨损形式和寿命评估[J]. 中国特种设备安全, 2014, 30(8): 37-41.
SUN L Q. Wearing mode and lifespan evaluation of water wall of circulating fluidized bed boiler[J]. China Special Equipment Safety, 2014, 30(8): 37-41.
|
|
|
| [2] |
林世瑶, 郭平. 机器人技术在燃煤电站系统中的应用探索[J]. 中国设备工程, 2021(13): 32-34.
LIN S Y, GUO P. Application of robot technology in coal-fired power station system[J]. China Plant Engineering, 2021(13): 32-34.
|
|
|
| [3] |
李博. 锅炉水冷壁检测机器人系统设计和控制策略研究[D]. 重庆: 重庆大学, 2020: 3-40.
LI B. Design and control strategy of boiler water wall detection robot system[D]. Chongqing: Chongqing University, 2020: 3-40.
|
|
|
| [4] |
罗璨. 锅炉水冷壁爬壁机器人运动机构及吸附方法研究[D]. 重庆: 重庆大学, 2020: 1-50.
LUO C. Research on motion mechanism and adsorption method of wall climbing robot for boiler water wall[D]. Chongqing: Chongqing University, 2020: 1-50.
|
|
|
| [5] |
马孝栋, 孙文, 李福龙, 等. 一种具有检测端可调节的磁吸附水冷壁检测机器人: CN217072383U[P]. 2022-07-29.
MA X D, SUN W, LI F L, et al. A magnetic adsorption water-cooled wall detection robot with adjustable detection end: CN217072383U[P]. 2022-07-29.
|
|
|
| [6] |
张阳. 罐体作业爬壁机器人的控制关键技术研究[D]. 唐山: 华北理工大学, 2017: 10-15.
ZHANG Y. Research on key control technology of wall-climbing robot for tank operation[D]. Tangshan: North China University of Science and Technology, 2017: 10-15.
|
|
|
| [7] |
徐阳阳. 爬壁机器人结构优化及控制系统研究[D]. 唐山: 华北理工大学, 2021: 55-63.
XU Y Y. Research on structure optimization and control system of wall climbing robot[D]. Tangshan: North China University of Science and Technology, 2021: 55-63.
|
|
|
| [8] |
王钰. 电控永磁吸盘控制器的研究[D]. 合肥: 合肥工业大学, 2016: 10-13.
WANG Y. Research on controller of electronically controlled permanent magnet sucker[D]. Hefei: Hefei University of Technology, 2016: 10-13.
|
|
|
| [9] |
李伟. 强电流脉冲控制的现代永磁起重吸盘的研究与设计[D]. 武汉: 武汉理工大学, 2003: 11-12.
LI W. Research and design of modern permanent magnet lifting sucker controlled by strong current pulse[D]. Wuhan: Wuhan University of Technology, 2003: 11-12.
|
|
|
| [10] |
苏港. 脉冲电永磁铁成套系统的设计与实现[D]. 岳阳: 湖南理工学院, 2022: 10-12.
SU G. Design and implementation of a complete system of pulsed electropermanent magnet[D]. Yueyang: Hunan Institute of Science and Technology, 2022 : 10-12.
|
|
|
| [11] |
魏环, 莫文玲. 大学物理学:下册[M]. 北京: 高等教育出版社, 2013: 66-68.
WEI H, MO W L. College physics: the last of two volumes[M]. Beijing: Higher Education Press, 2013: 66-68.
|
|
|
| [12] |
李闯. 铜板电控永磁压边拉深成形工艺研究[D]. 秦皇岛: 燕山大学, 2021: 26-27.
LI C. Study on deep drawing process of copper plate with electric control permanent magnet blank holder[D]. Qinhuangdao: Yanshan University, 2021: 26-27.
|
|
|
| [13] |
马亚飞. 电控永磁吸盘电磁场分析及应用于拉深工艺的初步研究[D]. 秦皇岛: 燕山大学, 2017: 25-27.
MA Y F. Electromagnetic field analysis of electronically controlled permanent magnet sucker and its application in deep drawing process[D]. Qinhuangdao: Yanshan University, 2017: 25-27.
|
|
|
| [14] |
兵器工业无损检测人员技术资格鉴定考核委员会. 常用钢材磁特性曲线速查手册[M]. 北京: 机械工业出版社, 2003: 30-32.
Technical Qualification Appraisal Committee for Non-destructive Testing Personnel in the Weapon Industry. Quick reference manual for magnetic characteristic curves of common steel materials[M]. Beijing: China Machine Press, 2003: 30-32.
|
|
|
| [15] |
张小松. 轮式悬磁吸附爬壁机器人研究[D]. 哈尔滨: 哈尔滨工业大学, 2012: 29-30.
ZHANG X S. Research on wheeled wall-climbing robot with suspended magnetic adsorption[D]. Harbin: Harbin Institute of Technology, 2012: 29-30.
|
|
|
| [16] |
刘慧娟, 张振洋, 宋腾飞, 等. ANSYS Maxwell+Workbench 2021电机多物理场耦合有限元分析从入门到工程实战[M]. 北京: 化学工业出版社, 2022: 50 -90.
LIU H J, ZHANG Z Y, SONG T F, al er. ANSYS Maxwell+Workbench 2021 motor multi-physical field coupling finite element analysis from the beginning to engineering practice[M]. Beijing: Chemical Industry Press, 2022: 50-90.
|
|
|
| [17] |
中国人民解放军京字一八六部队. 关于在铝镍钴永磁合金测试中材料矫顽力与磁化场关系的实验报告[J]. 电工材料, 1974(Z1): 219-221.
The 186th People's Liberation Army. Experimental report on the relationship between coercivity and magnetization field in the test of Al-Ni-Co permanent magnet alloy[J]. Electrical Engineering Materials, 1974(Z1): 219-221.
|
|
|
| [18] |
李振铎. 基于电控永磁技术的变力夹紧系统研究[D]. 秦皇岛: 燕山大学, 2019: 41-43.
LI Z D. Research on variable force clamping system based on electronically controlled permanent magnet technology[D]. Qinhuangdao: Yanshan University, 2019: 41-43.
|
|
|
| [19] |
盛立波. 锅炉水冷壁面检测机器人本体设计与实验研究[D]. 杭州: 浙江工业大学, 2020: 42-43.
SHENG L B. Ontology design and experimental study of boiler water wall inspection robot[D]. Hangzhou: Zhejiang University of Technology, 2020: 42-43.
|
|
|
| [20] |
谢祖荣, 李伟, 黄之初. 强电流脉冲控制的永磁起重吸盘研究与设计[J]. 武汉理工大学学报, 2002, 24(7): 58-61.
XIE Z R, LI W, HUANG Z C. Study and design of permanent magnetism hosting pad controlled by the pulse of strong current[J]. Journal of Wuhan University of Technology, 2002, 24(7): 58-61.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|