In order to improve the jumping height of multi-legged jumping robot, based on the leg structure and jumping mechanism of jumping spider, a composite jumping robot based on fuselage ejection and leg extension was designed. Firstly, based on the jumping mechanism of jumping spider, the leg structure and ejection device of robot were designed, and the overall structure of robot was modeled using UG 3D modeling software. Secondly, the MD-H (modified Denavit-Hartenberg) method was used for conduct kinematic modeling and analysis of the robot's leg, MATLAB software was used to calculate the working space of the robot's leg, and Lagrange method was used to calculate the dynamics of the leg. Then, a ejection device employing ratchet drive and bevel gear drive was designed, and its energy storage spring was designed according to the law of energy conservation and Hooke's law. Next, the motion control system for the robot was established. Finally, ADAMS motion simulation was carried out, and the results showed that the maximum height was 734.117 6 mm when the robot jumped vertically, and the maximum forward distance was 447.641 7 mm when it jumped forward. The whole motion process took 1.5-2.0 s. A physical model was made using 3D printing technology for experimental verification. The research results show that the composite jumping motion of multi-legged jumping robot can effectively improve the vertical jumping height and forward jumping distance, so the robot has better practicality.
Xiaohua WEI,Feng HAN,Xiaoliang HAN,Mingzhong HE. Design and analysis of bionic robot with compound jumping. Chinese Journal of Engineering Design, 2025, 32(3): 334-345.
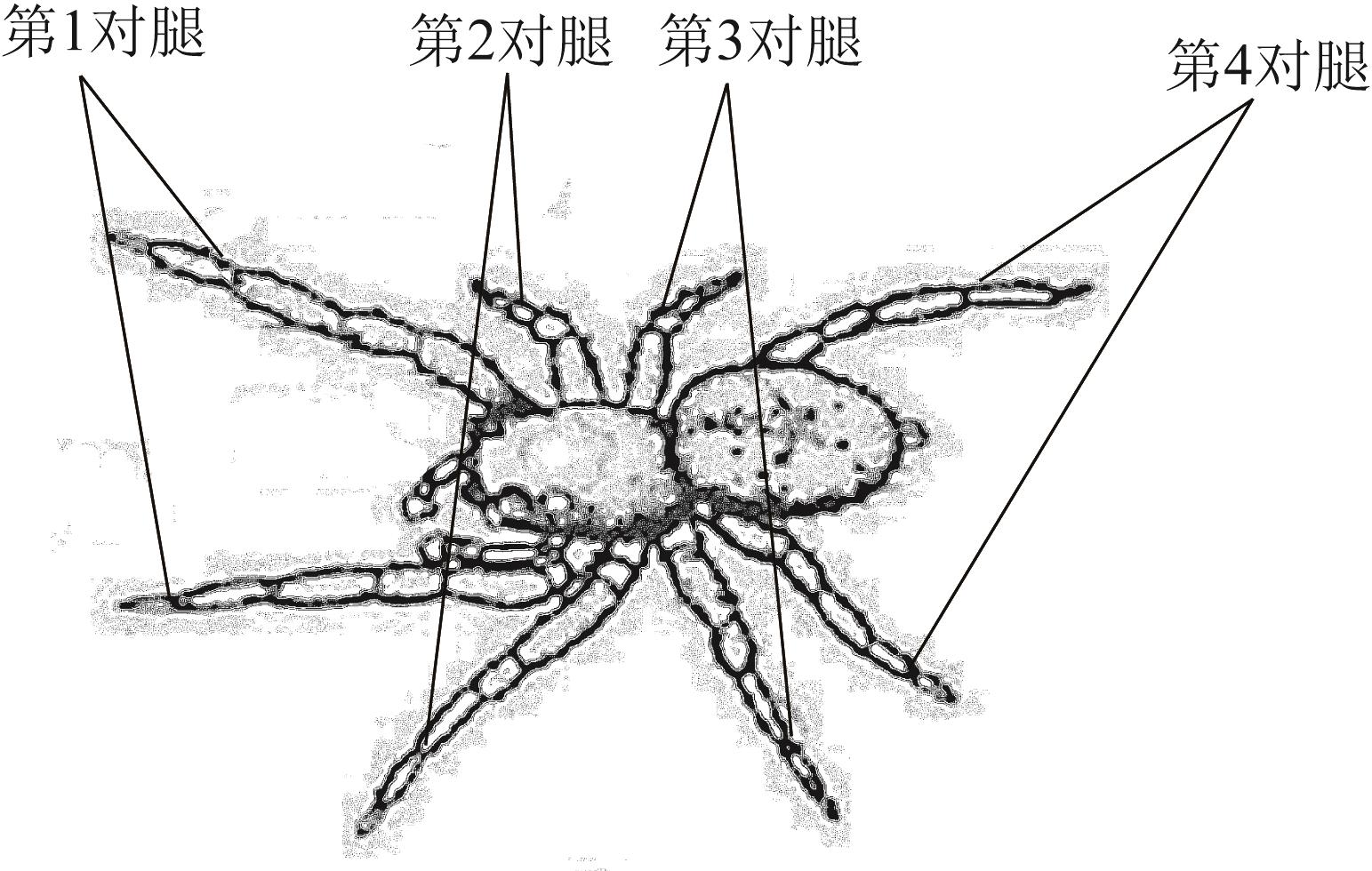
Fig.1 Schematic diagram of leg distribution of jumping spider
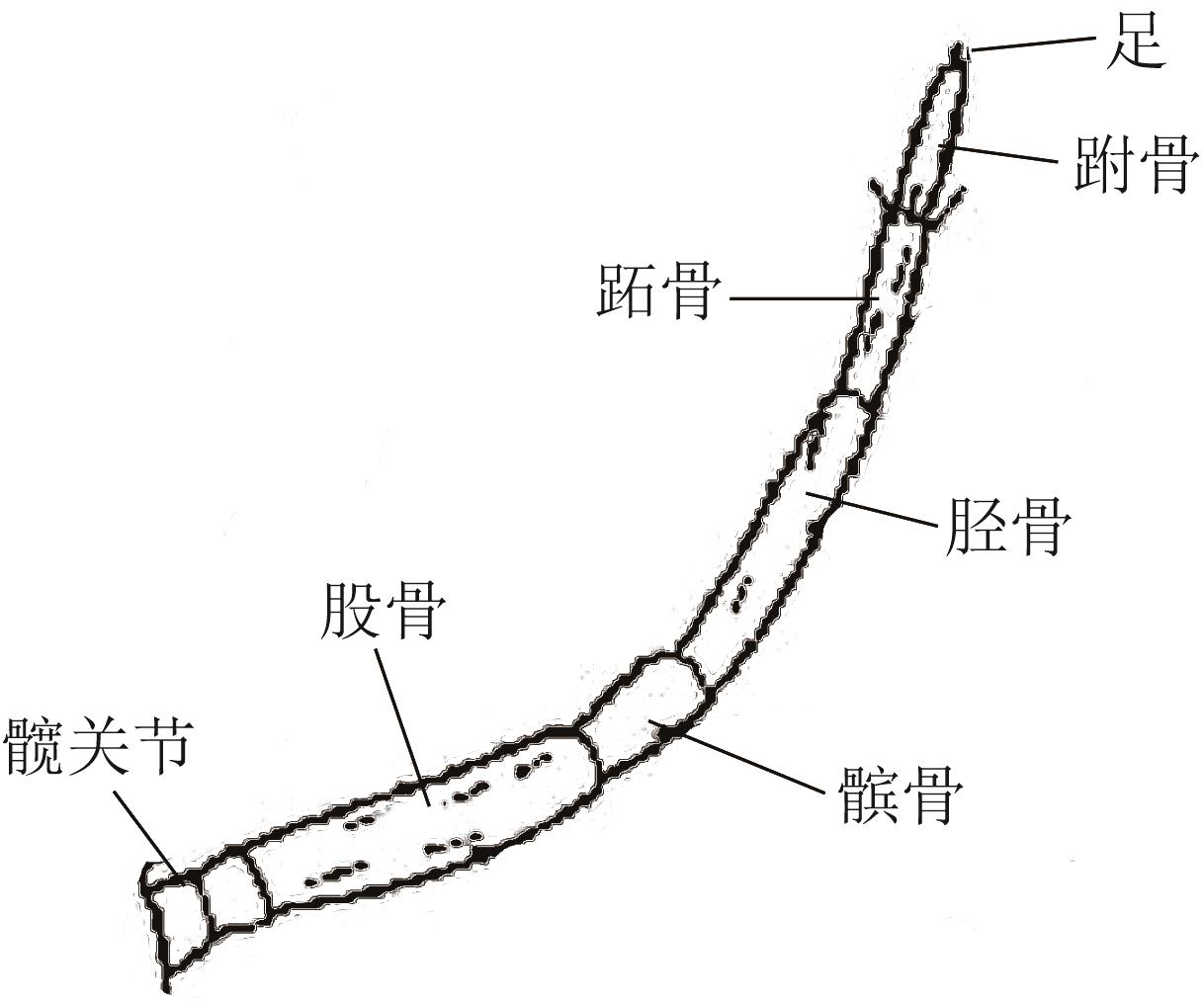
Fig.2 Composition of leg of jumping spider
Fig.3 Jumping process of jumping spider
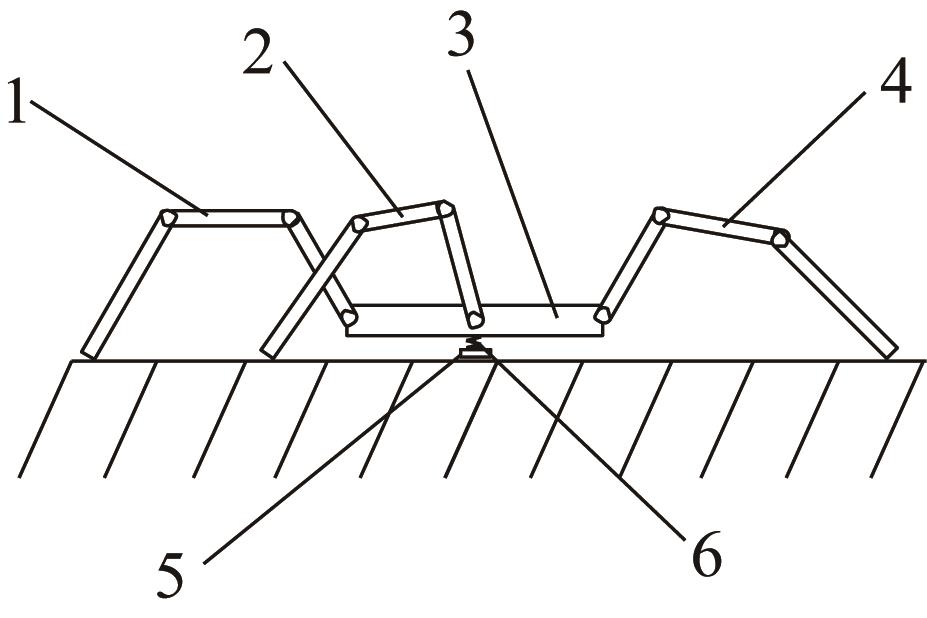
Fig.4 Spring damping device
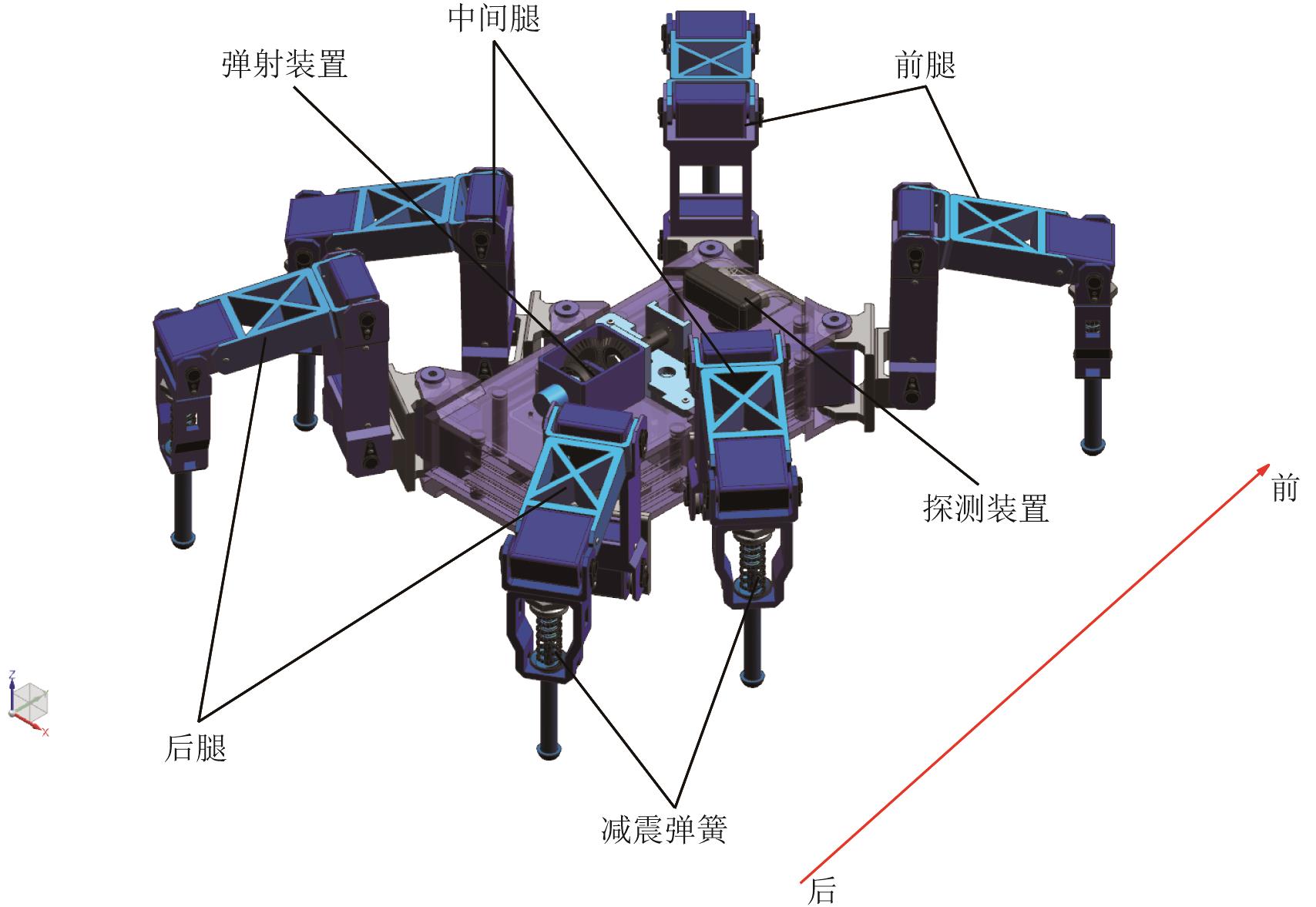
Fig.5 Overall model of robot
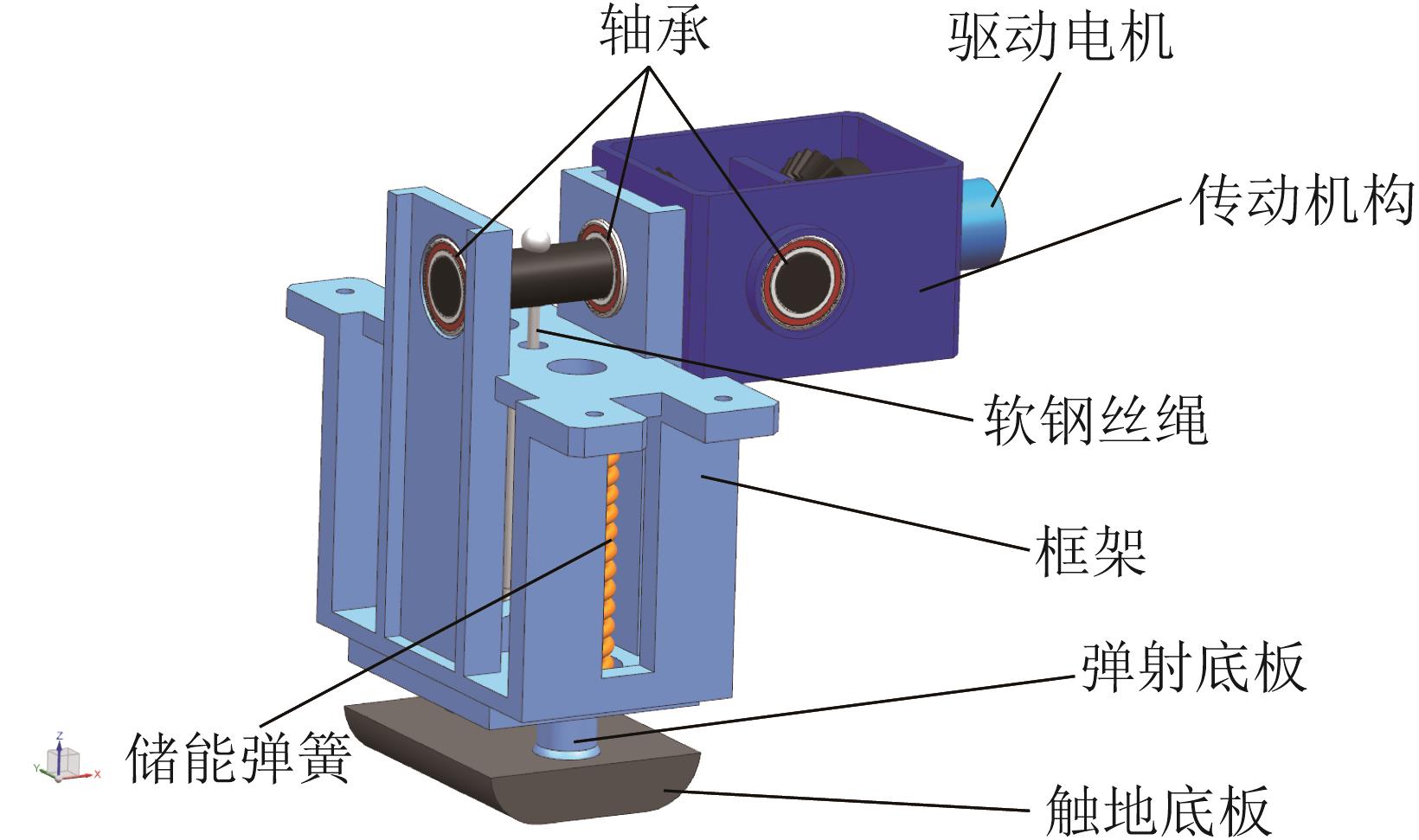
Fig.6 Schematic diagram of robot structure
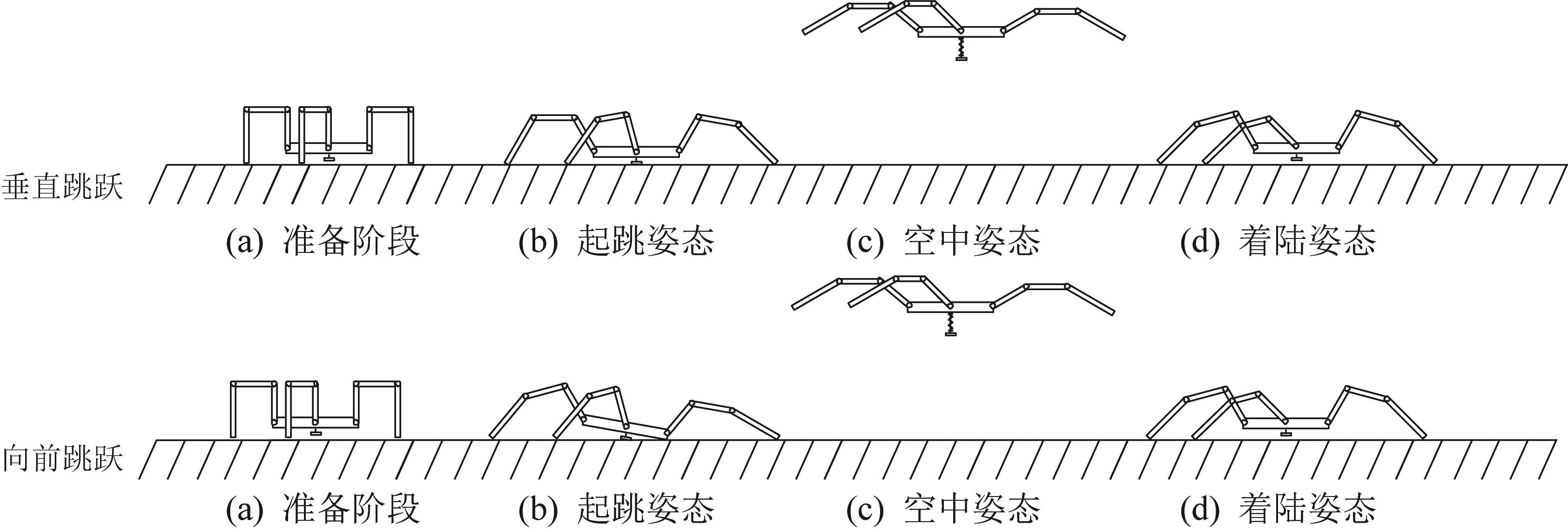
Fig.7 Jumping process of robot
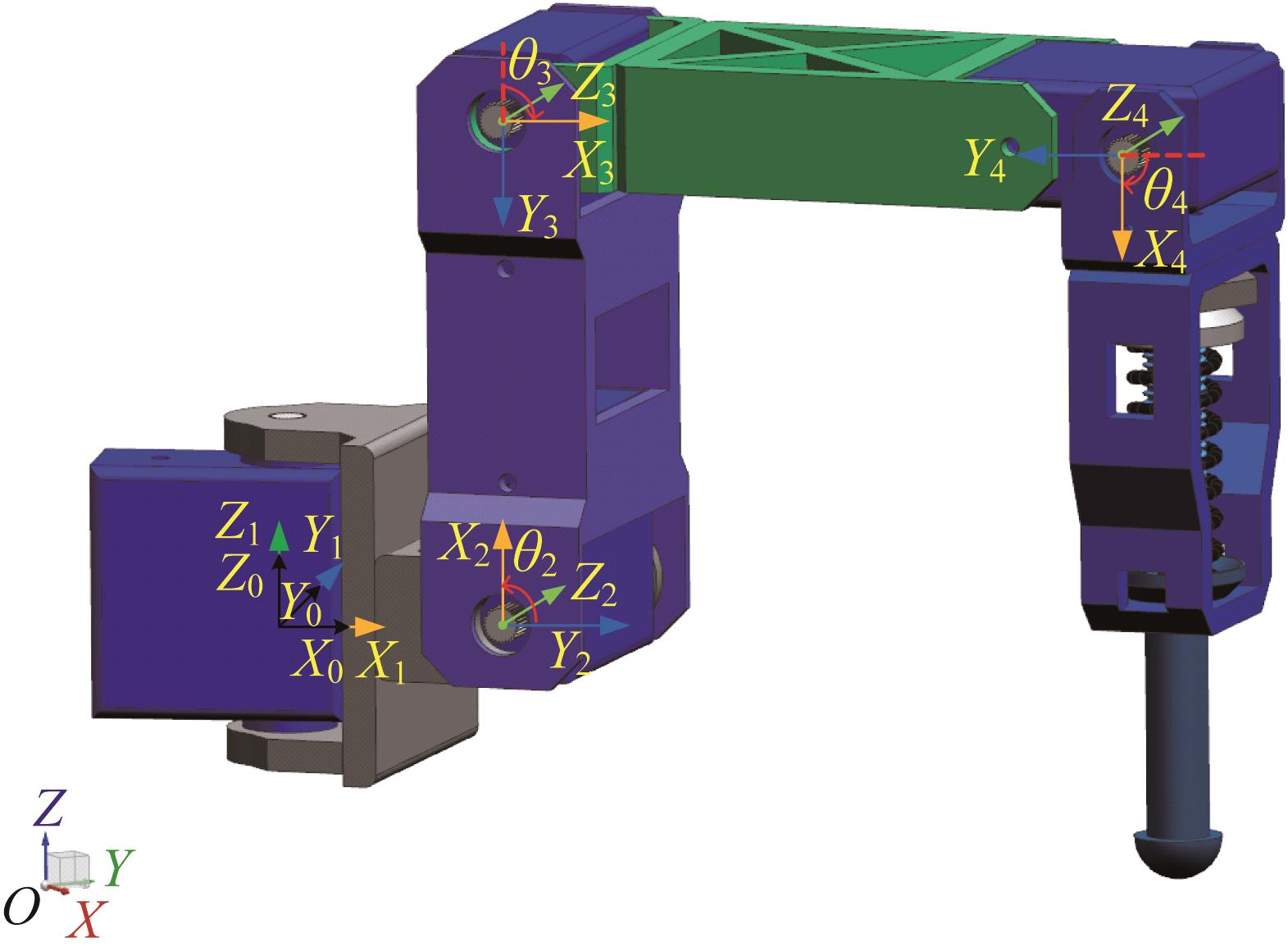
Fig.8 Schematic of robot leg coordinate system
连杆
αi-1/(°)
ai-1
1
0
0
θ1
0
2
3
4
-90
0
0
0
L2
L3
θ2
θ3
θ4
0
0
0
Table 1Parameters of D-H model of robot leg
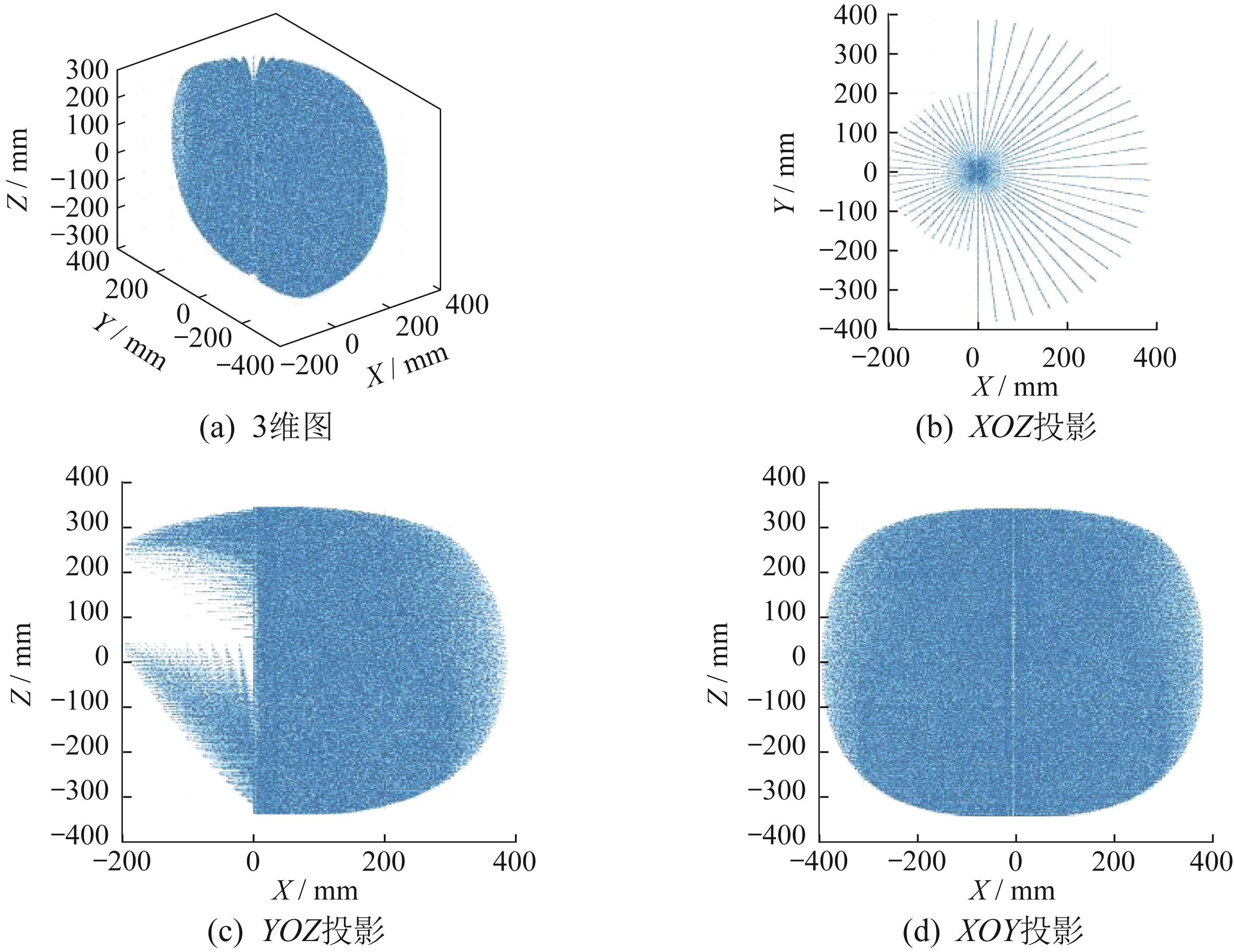
Fig.9 Working space of robot leg with hip joint movement
Fig.10 Working space of robot leg without hip joint movement
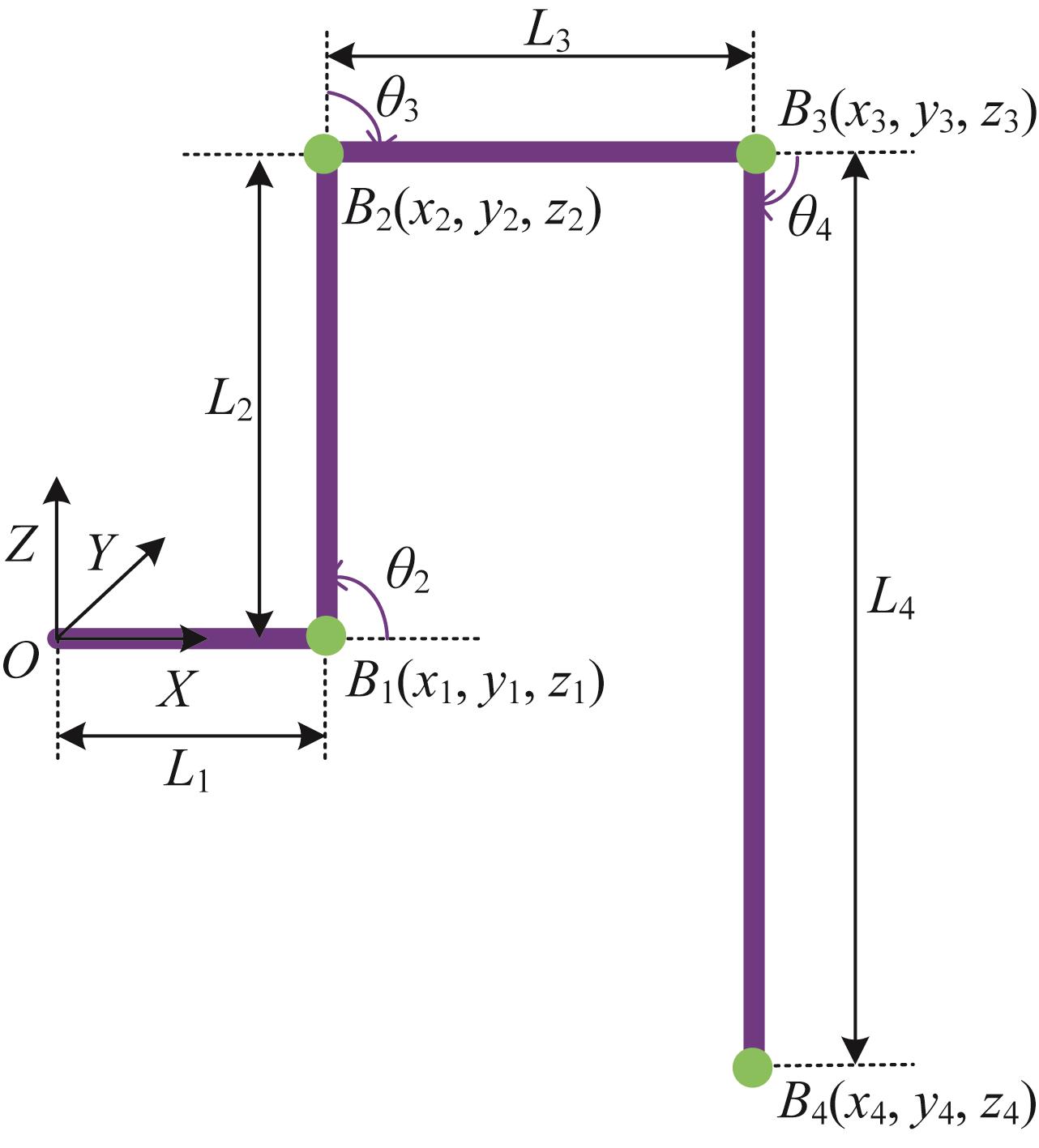
Fig.11 Simplified dynamics model of robot leg
Fig.12 Structure of ejection device of robot
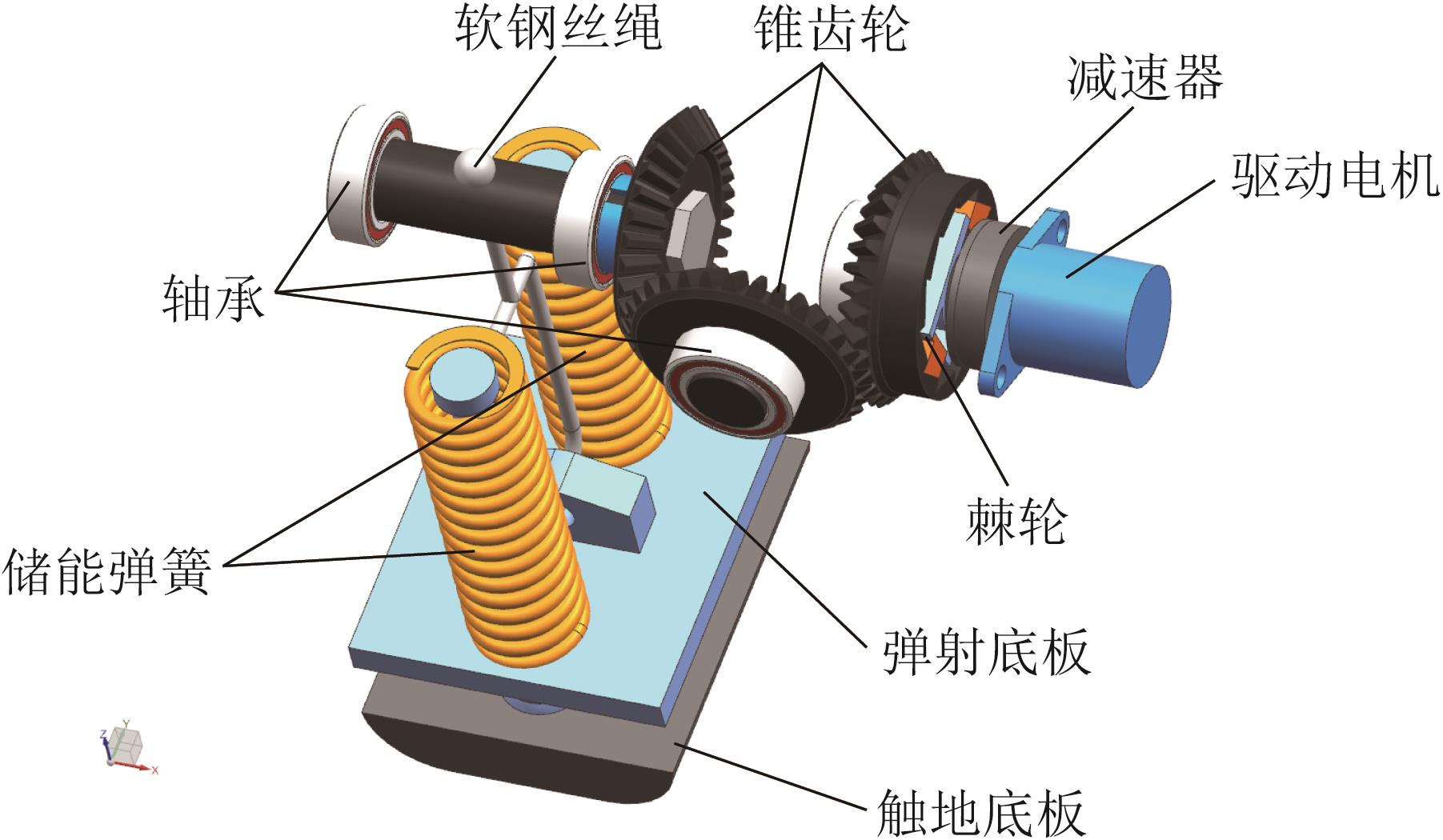
Fig.13 Structure of transmission mechanism of ejection device
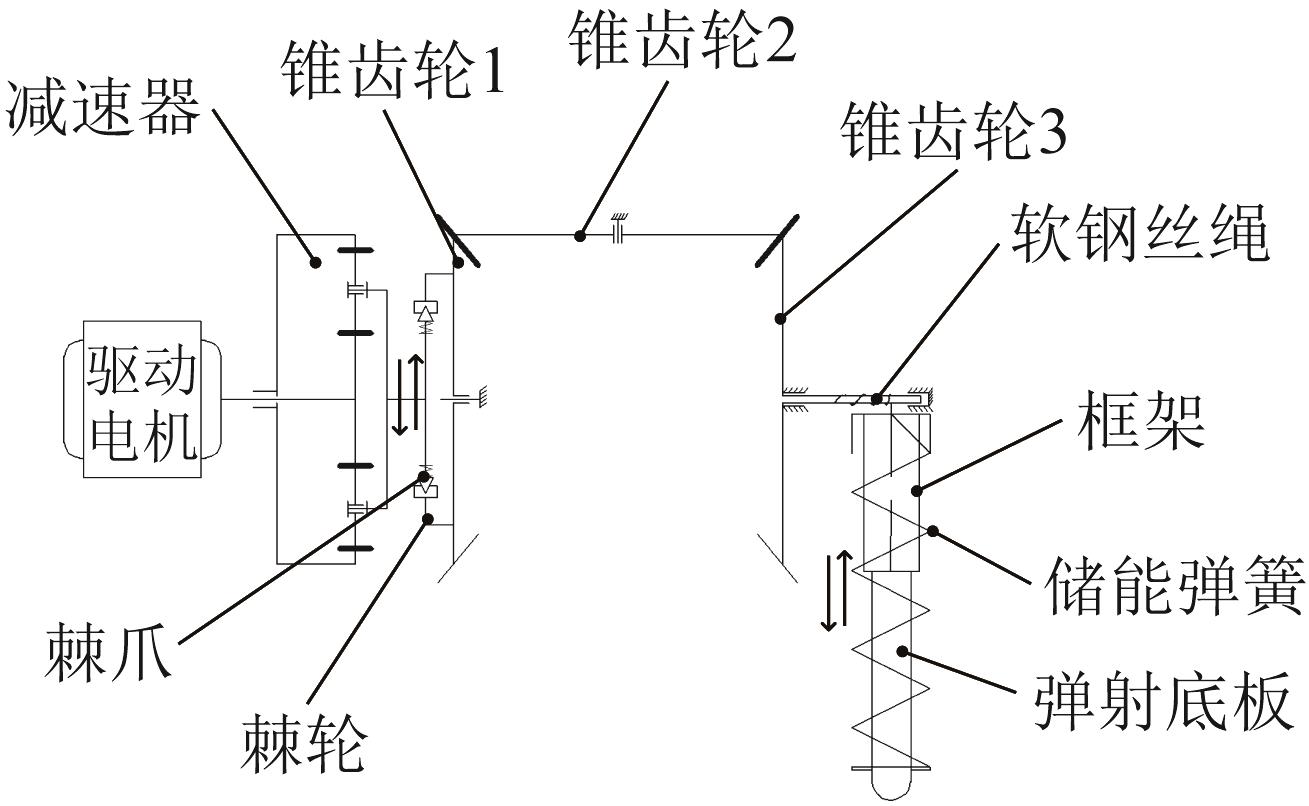
Fig.14 Schematic diagram of transmission of ejection device
部件
长度/mm
质量/g
尺寸(长×宽)/mm×mm
髋部连杆
44.2
29.72
股骨连杆
100
25.31
膝-胫连杆
104
34.44
跗骨连杆
140
40.03
基座
350.21
215×115
Table 2Parameters of main component of robot
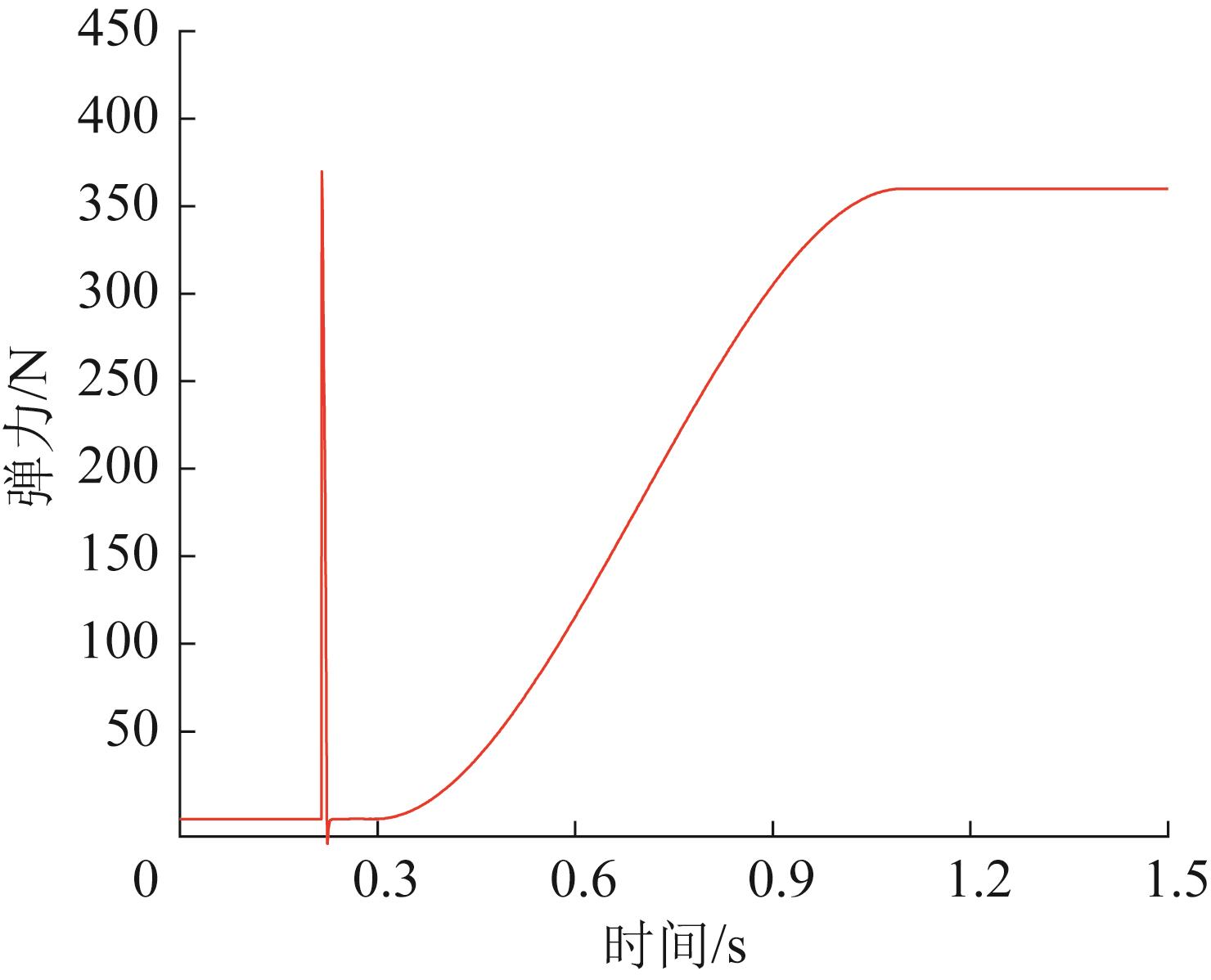
Fig.15 Curve of spring elasticity
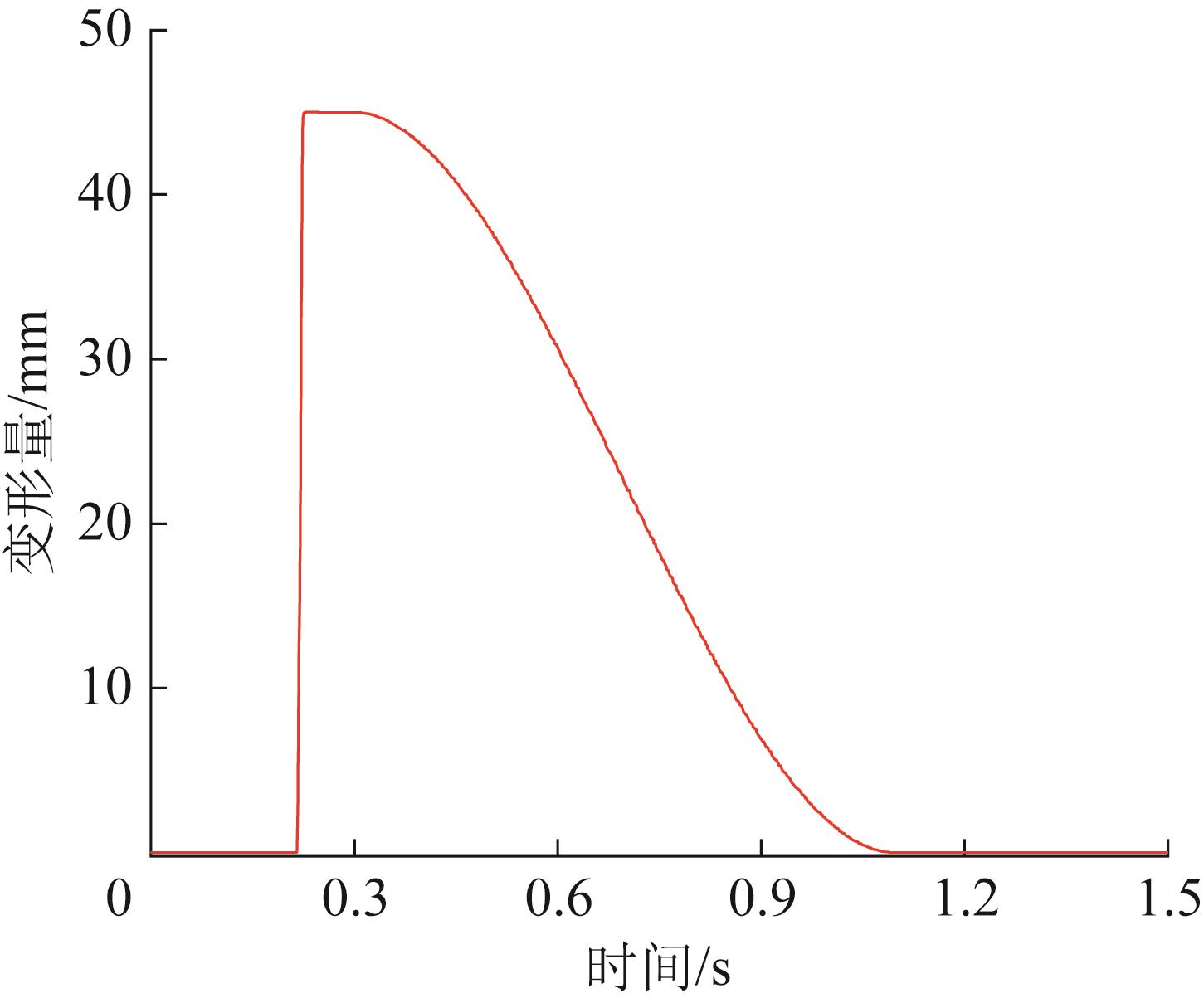
Fig.16 Curve of spring deformation
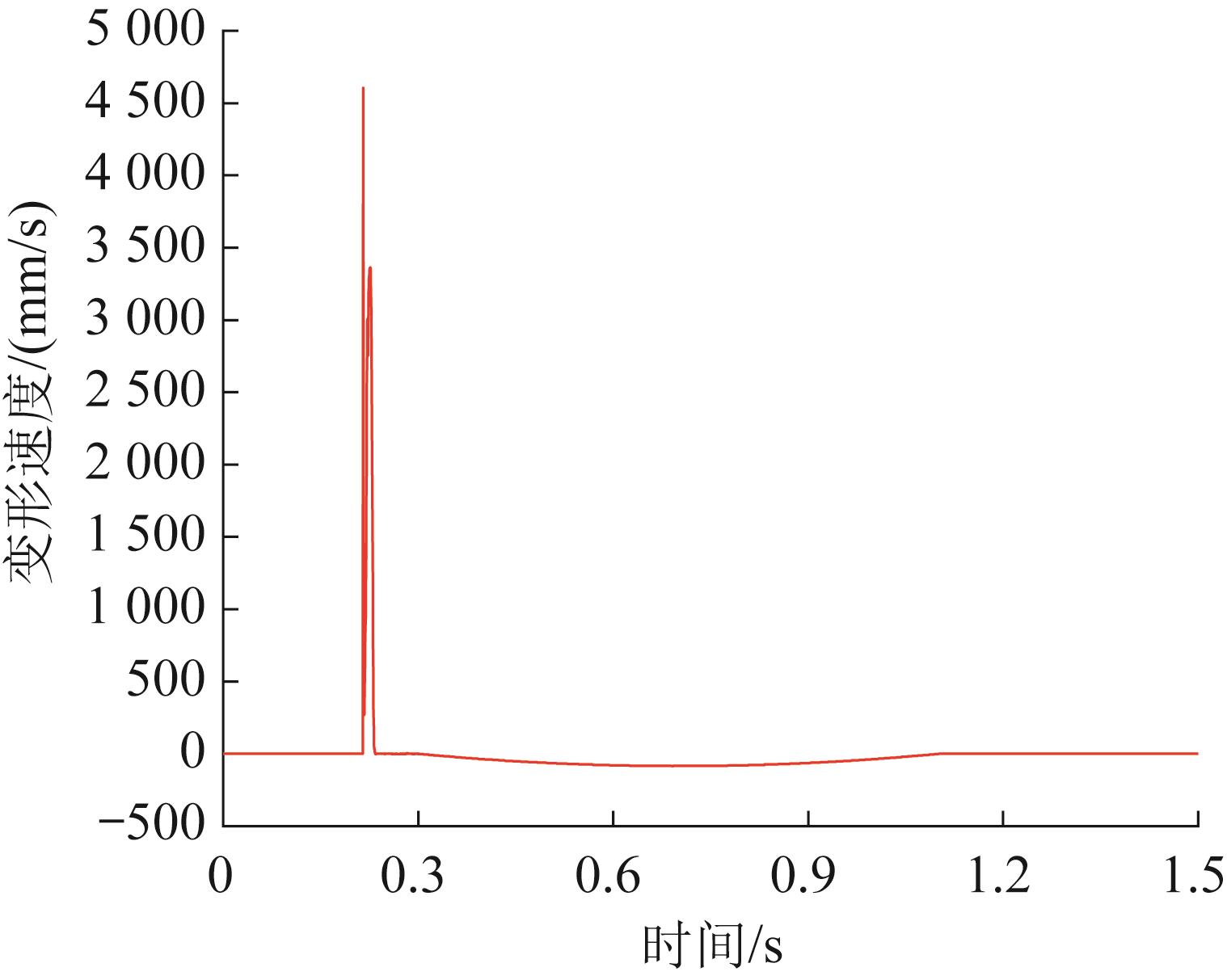
Fig.17 Curve of spring deformation speed
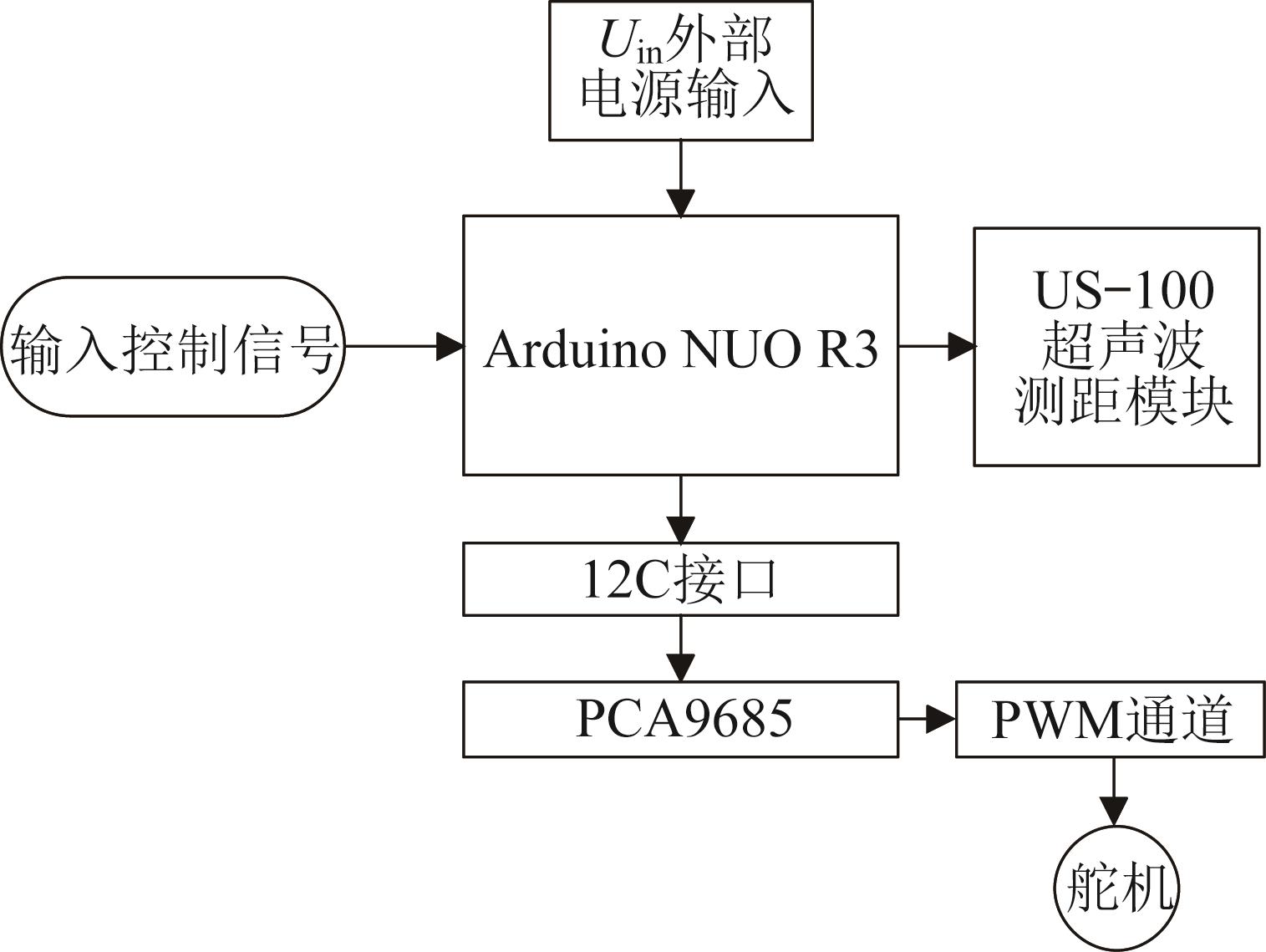
Fig.18 Hardware structure of motion control system of robot
Fig.19 Leg postures of jumping spider with jumping
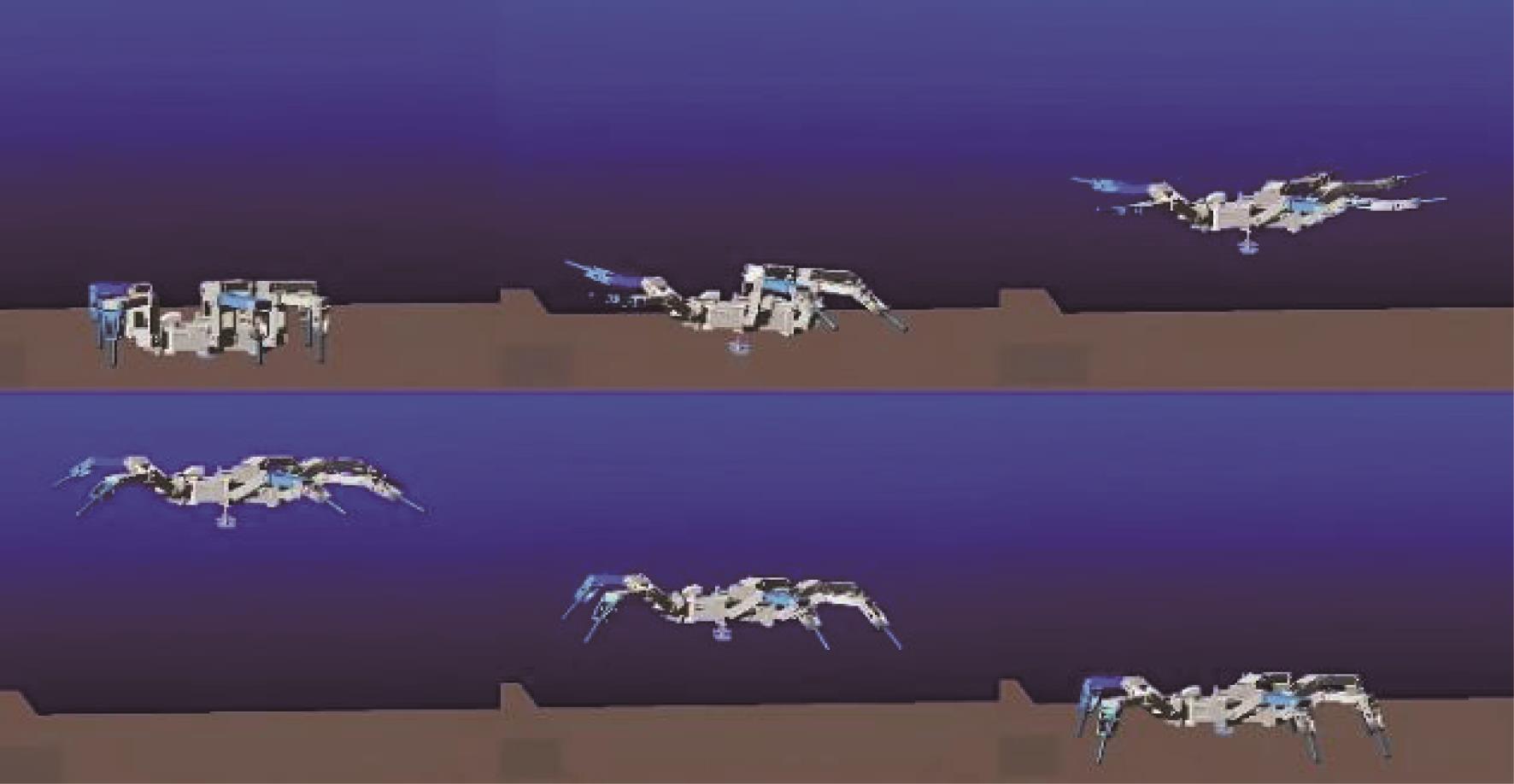
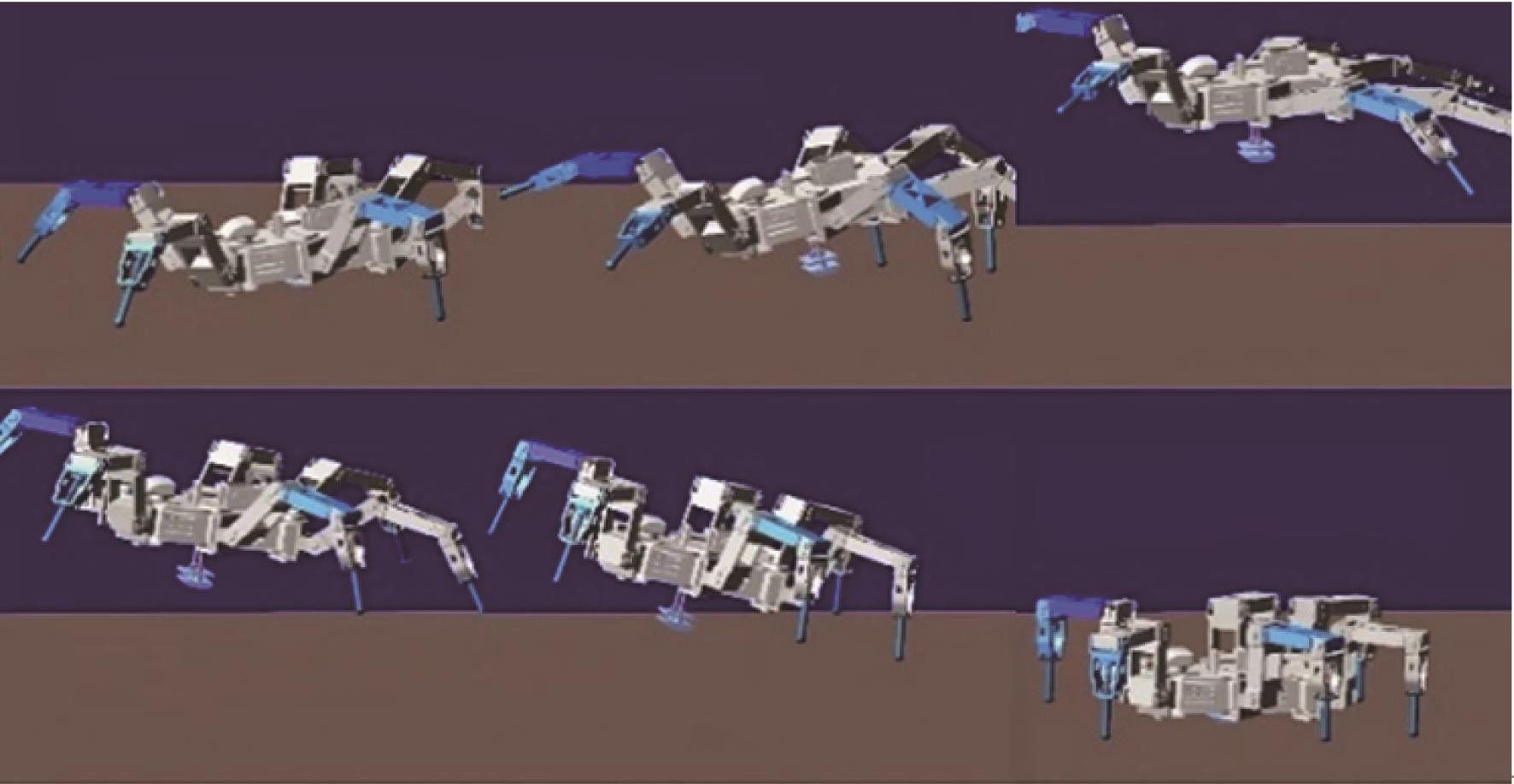
Fig.20 Simulation process of robot's vertical jump
关节
步足1
步足2
步足3
步足4
步足5
步足6
髋关节
0
0
0
0
0
0
腿关节
-60
-60
-60
60
60
60
膝关节
60
60
60
-60
-60
-60
跗关节
50/-30
50/-30
50/30
-50/30
-50/30
-50/30
Table 3Setting of leg joint angles with robot's vertical jump
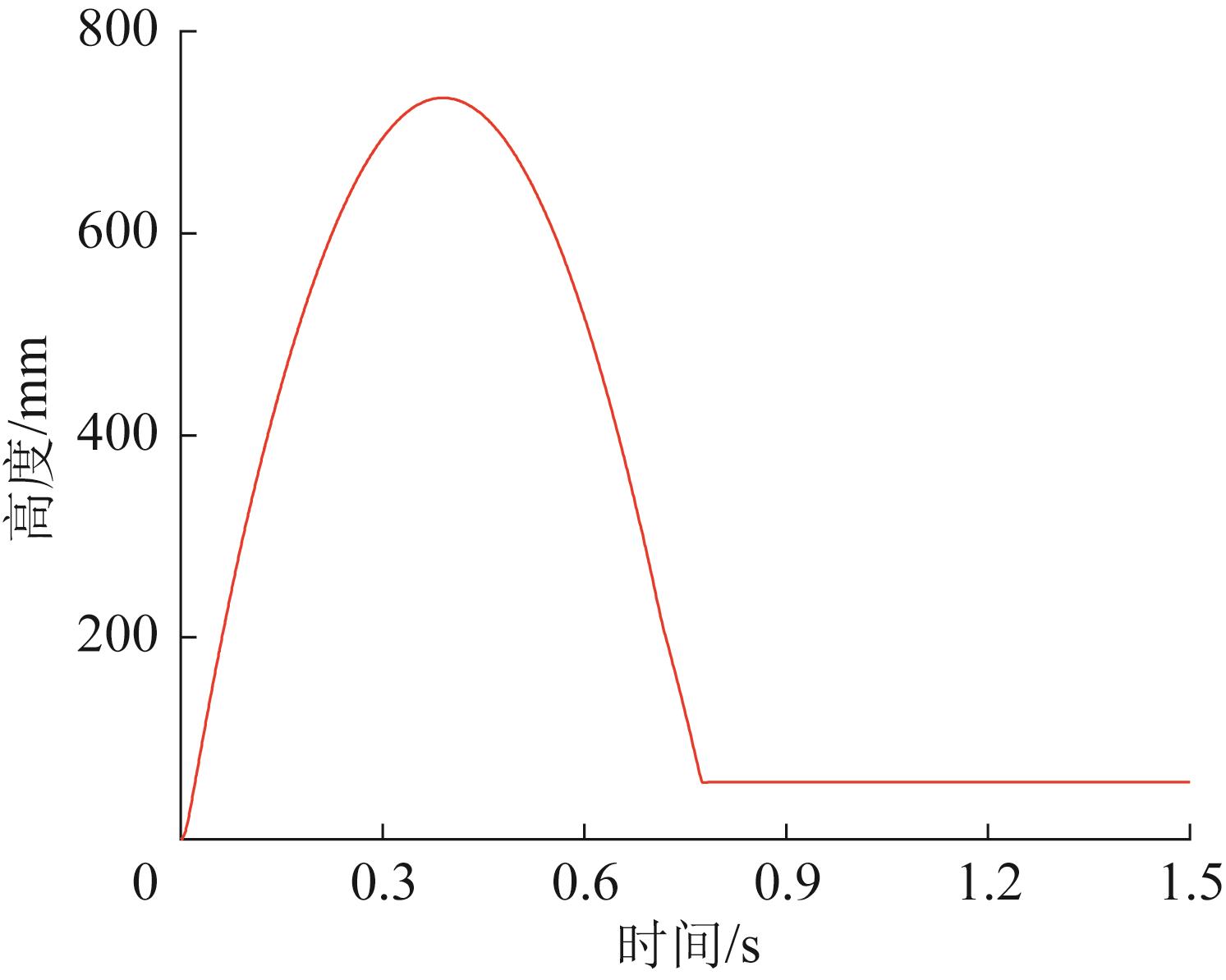
Fig.21 Height curve of mass center with robot's vertical jump
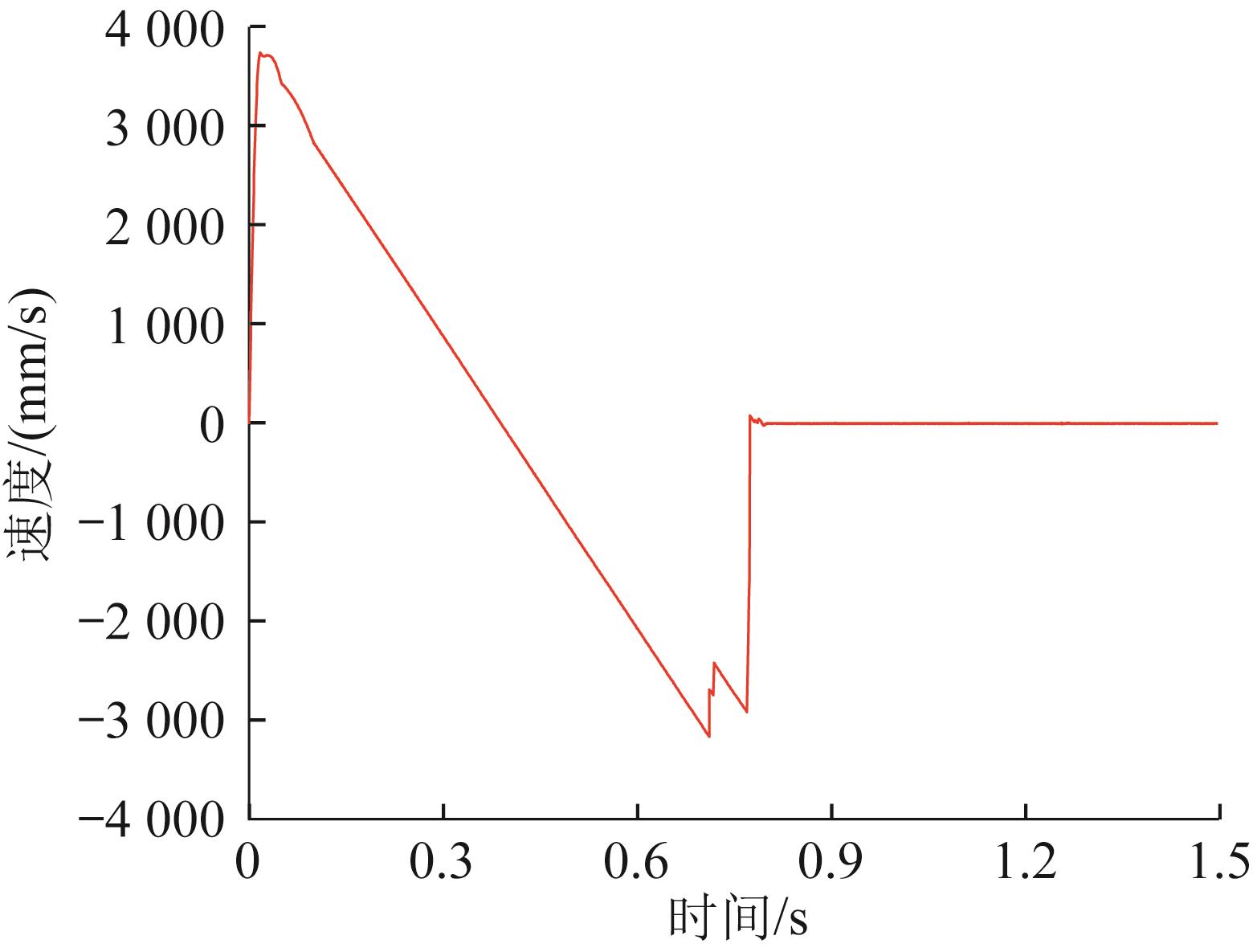
Fig.22 Velocity curve of mass center with robot's vertical jump
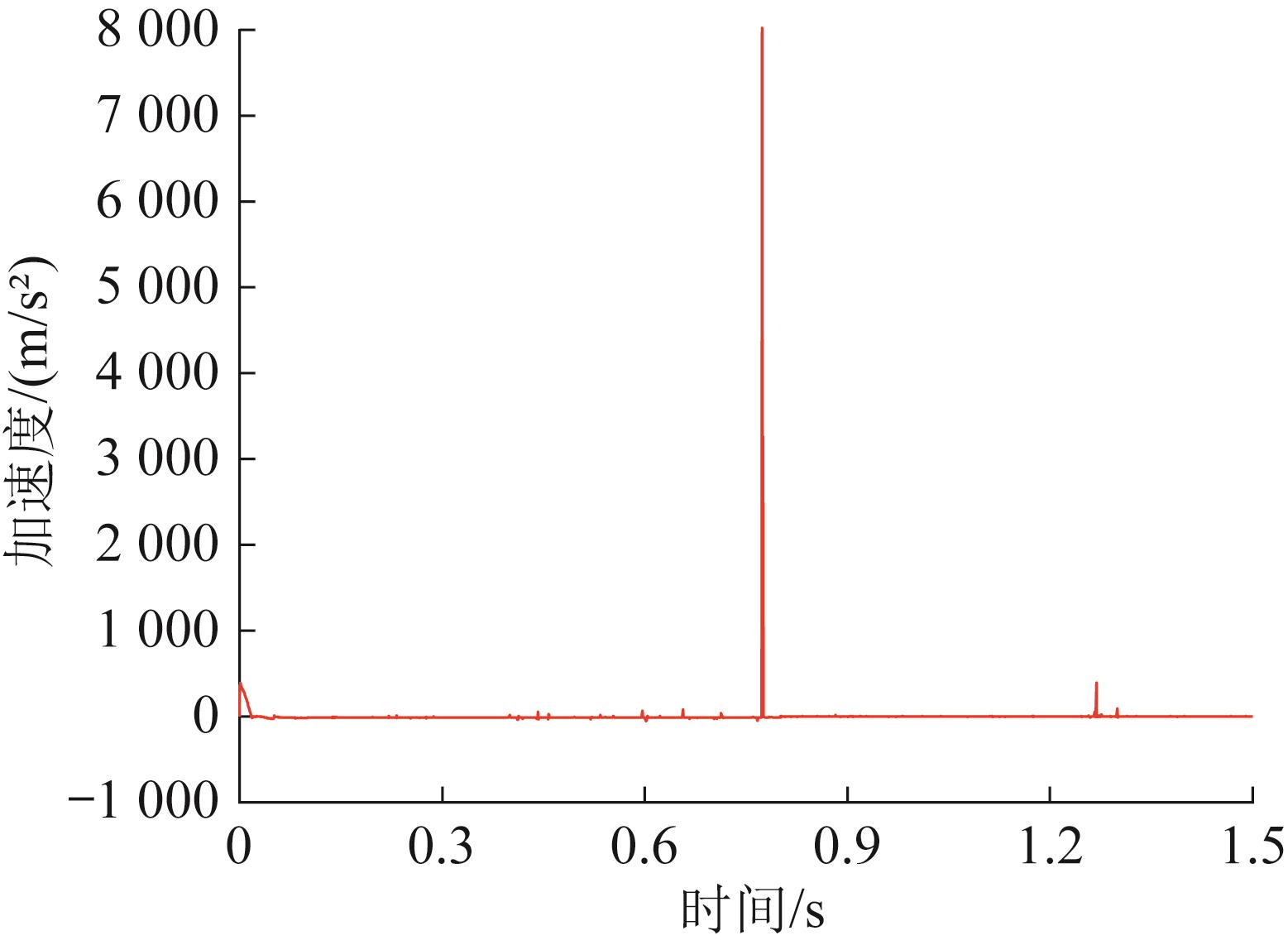
Fig.23 Acceleration curve of mass center with robot's vertical jump
Fig.24 Simulation process of robot's forward jump
关节
步足1
步足2
步足3
步足4
步足5
步足6
髋关节
0
0
0
0
0
0
腿关节
-29/29
-35/-40/75
-53.5/-40/93.5
29/-29
-35/-40/-75
-53.5/-40/93.5
膝关节
35/-35
25/40/-65
38.5/40/-78.5
-35/35
-25/-40/65
-38.5/-40/78.5
跗关节
40/30/-70
9.9/40/-49.9
22/60/-82
-40/-30/70
-9.9/-40/49.9
-22/-60/82
Table 4Setting of leg joint angles with robot's forward jump
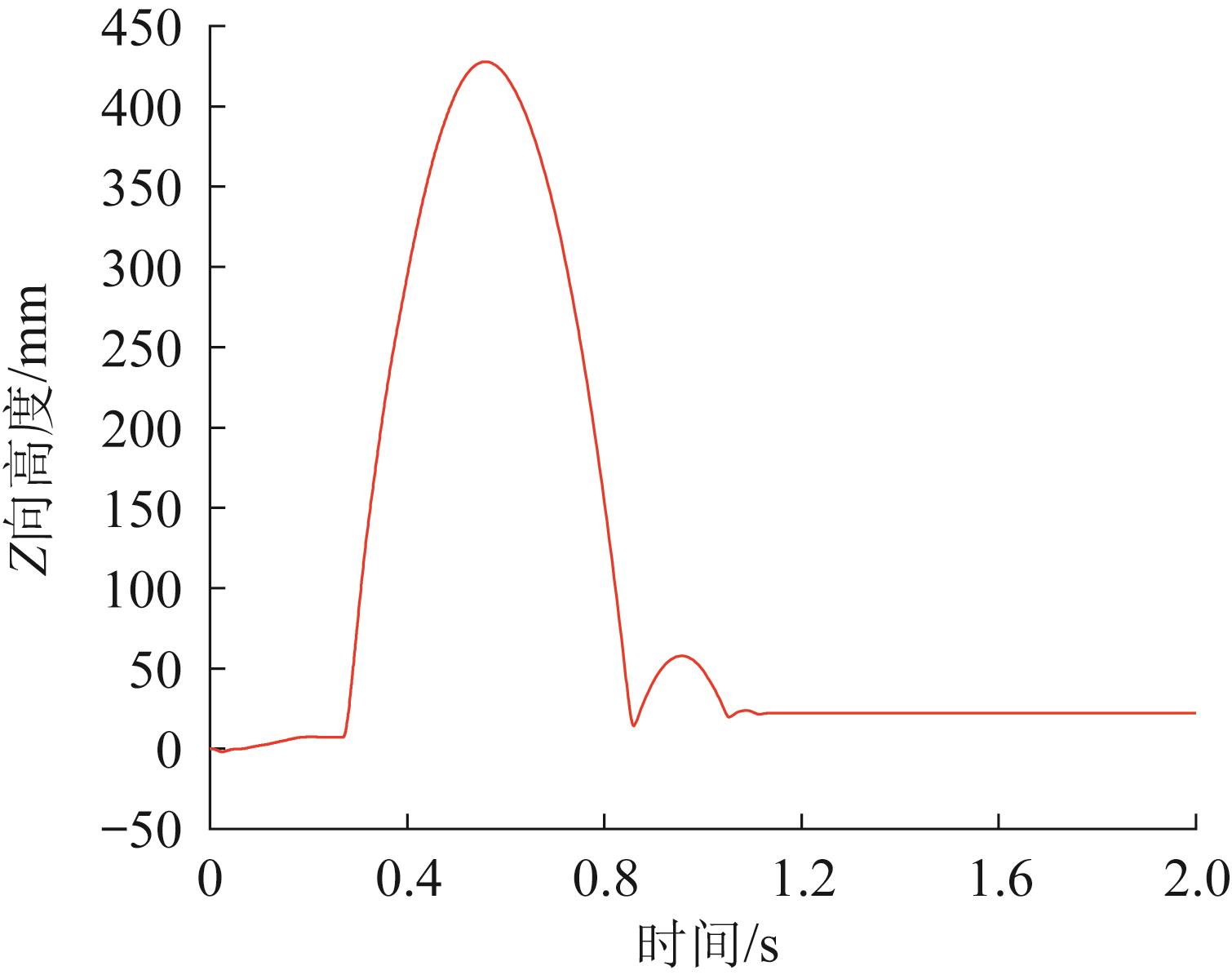
Fig.25Z-direction displacement curve of mass center with robot's forward jump
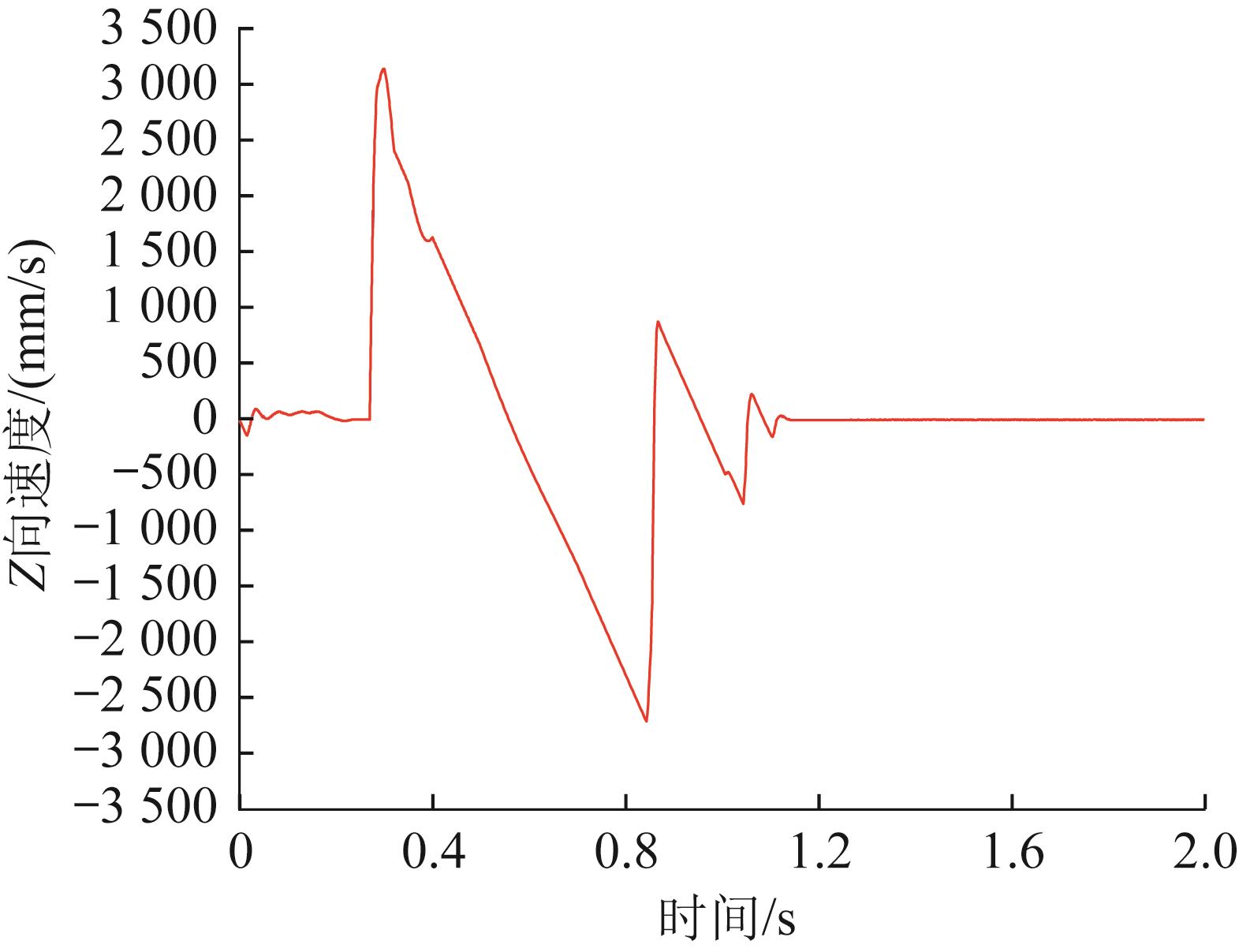
Fig.26Z-direction velocity curve of mass center with robot's forward jump
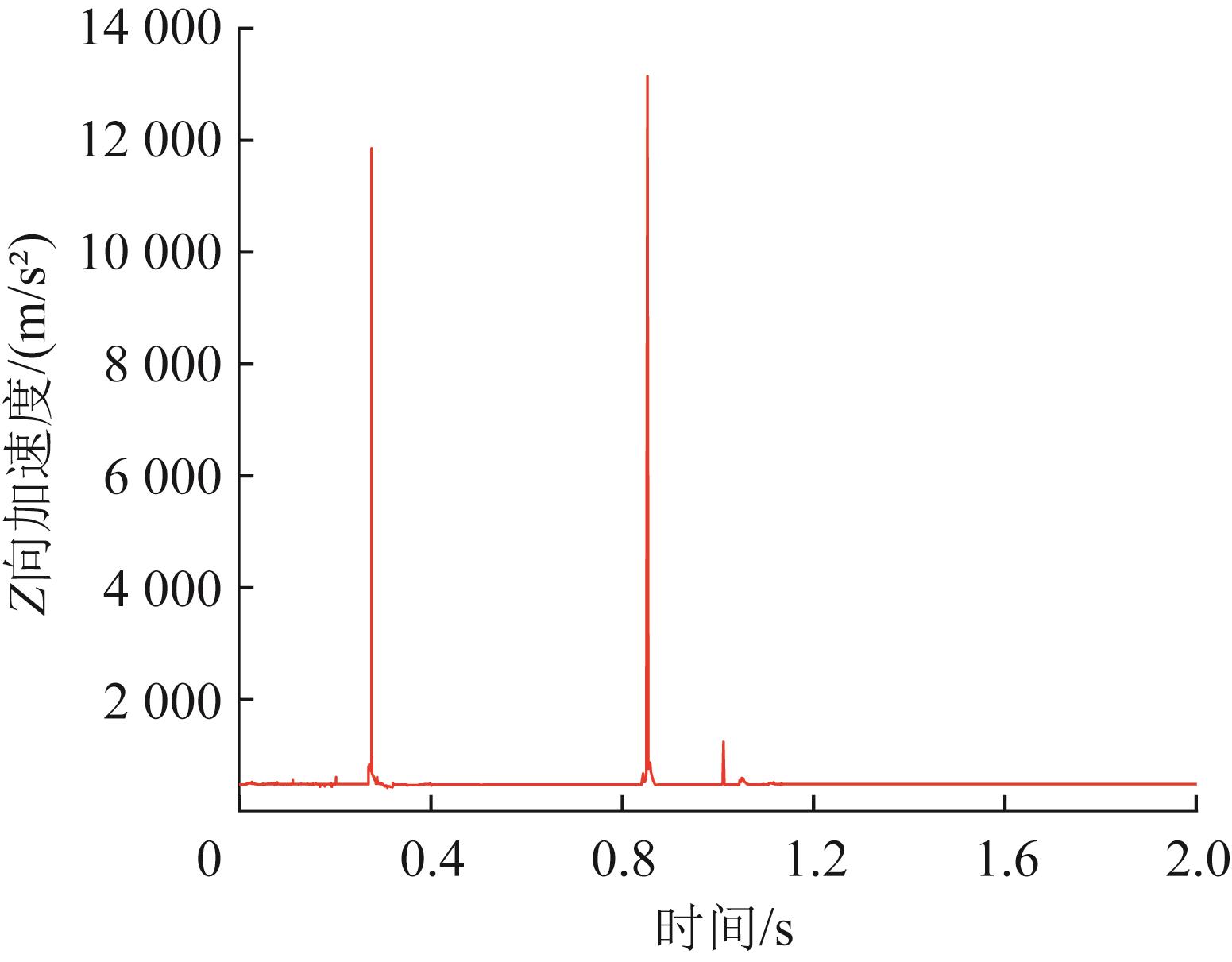
Fig.27Z-direction acceleration curve of mass center with robot's forward jump
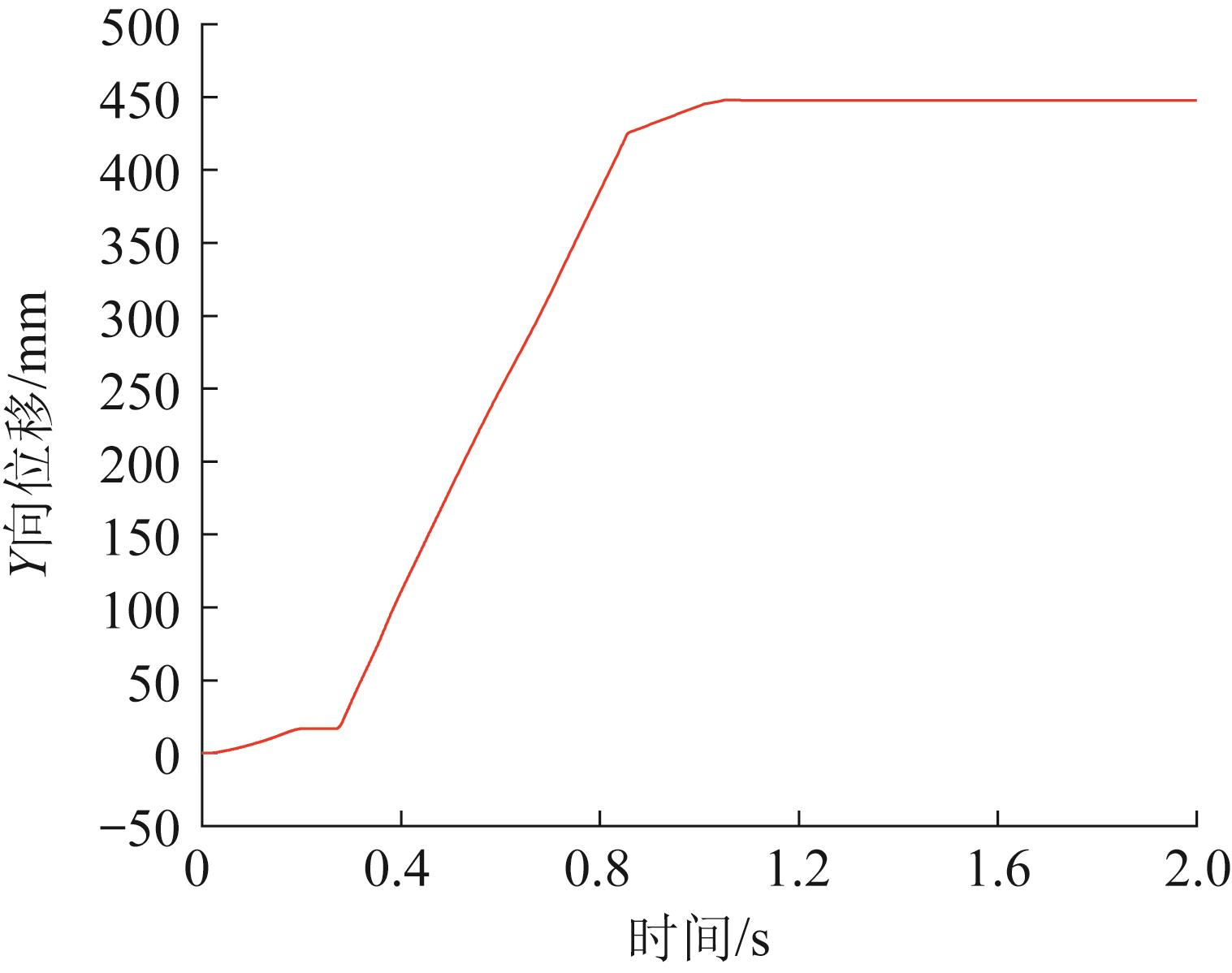
Fig.28Y-direction displacement curve of mass center with robot's forward jump
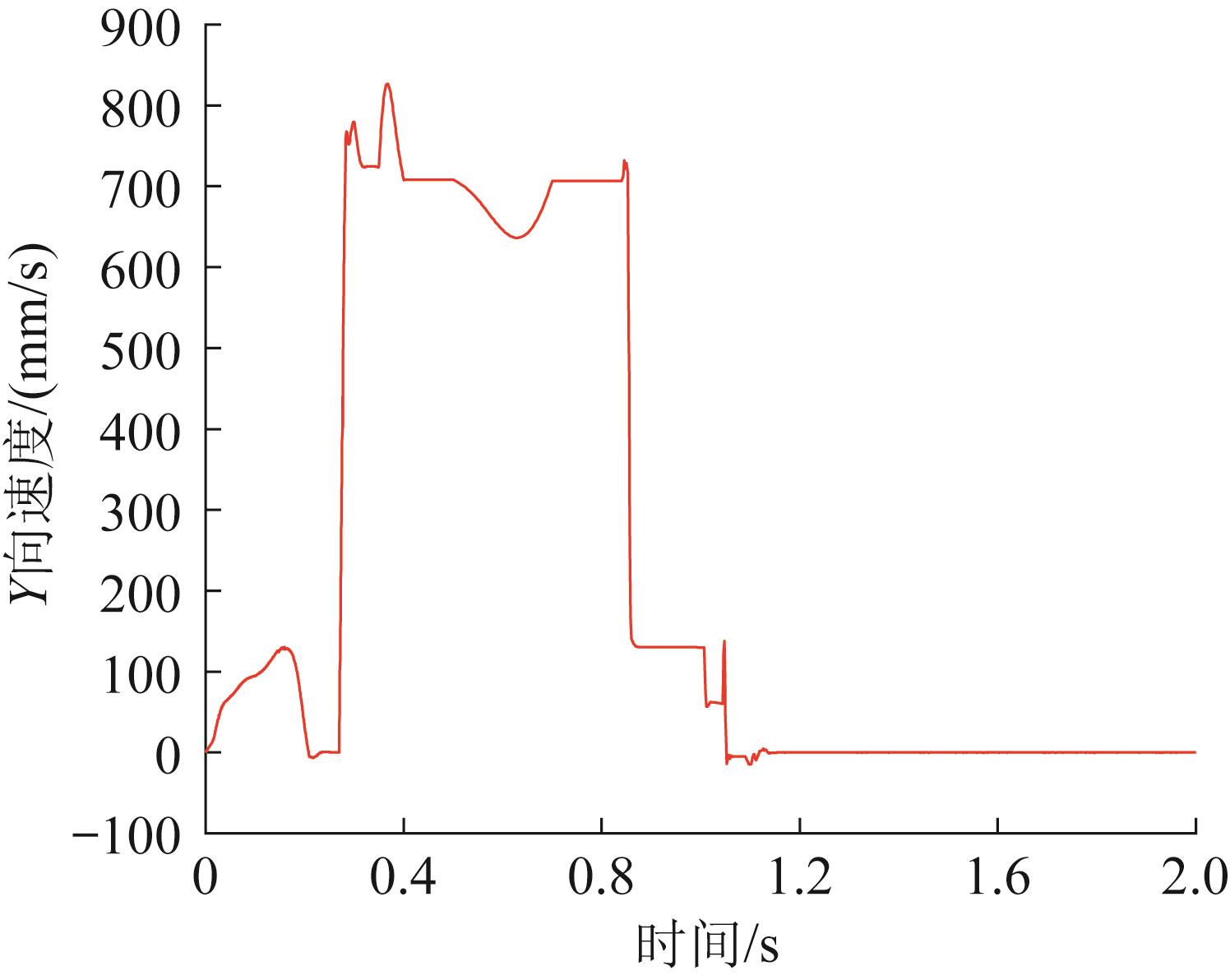
Fig.29Y-direction velocity curve of mass center with robot's forward jump
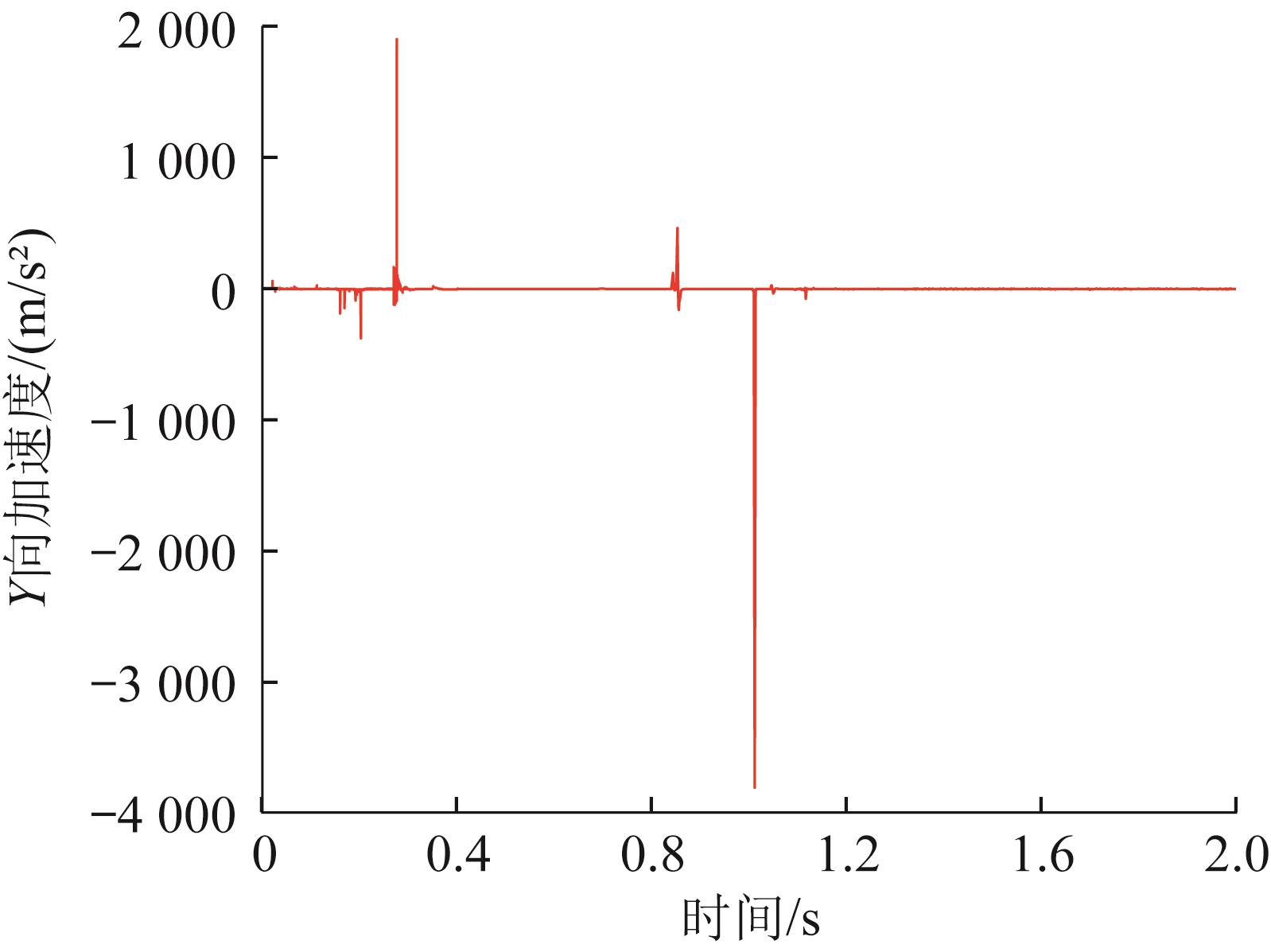
Fig.30Y-direction acceleration curve of mass center with robot's forward jump
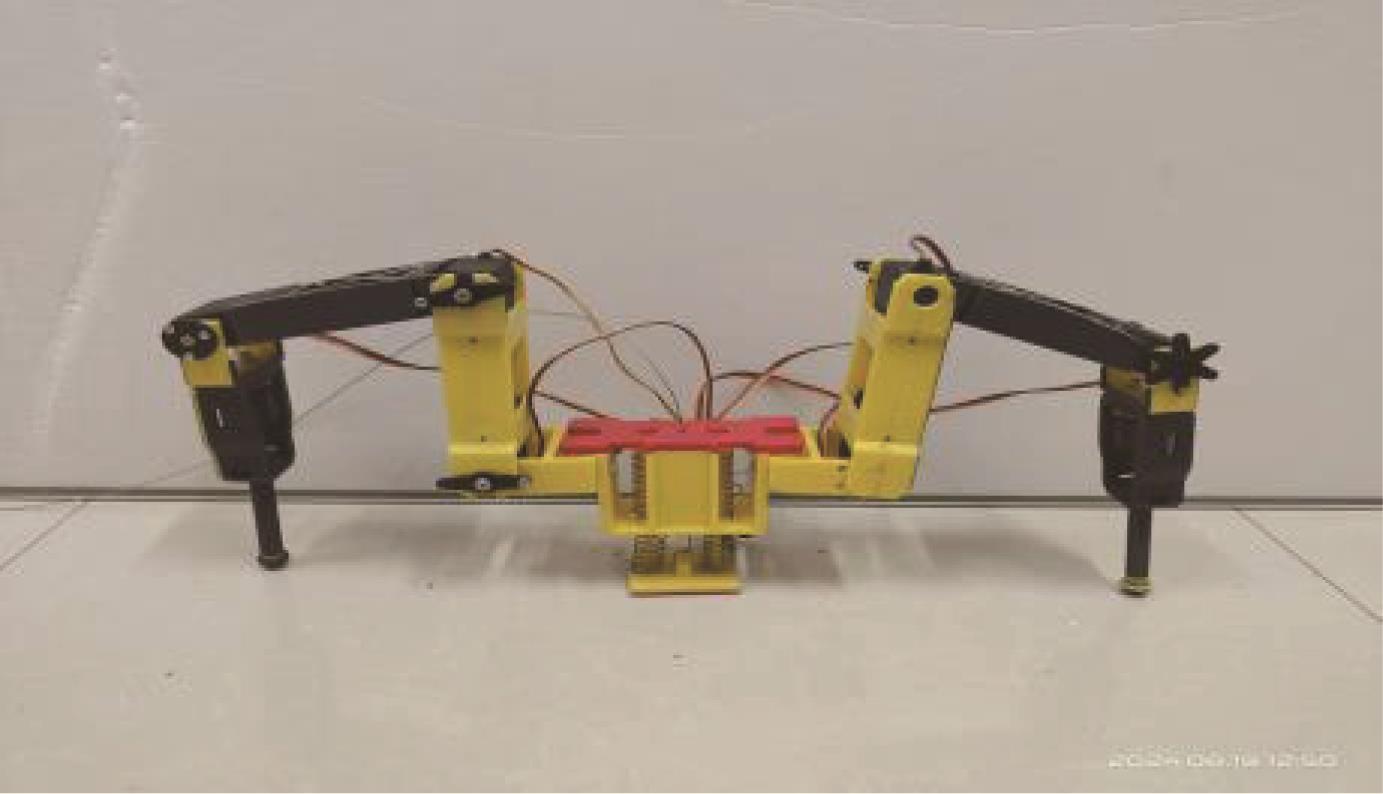
Fig.31 Ejection device and leg model of robot
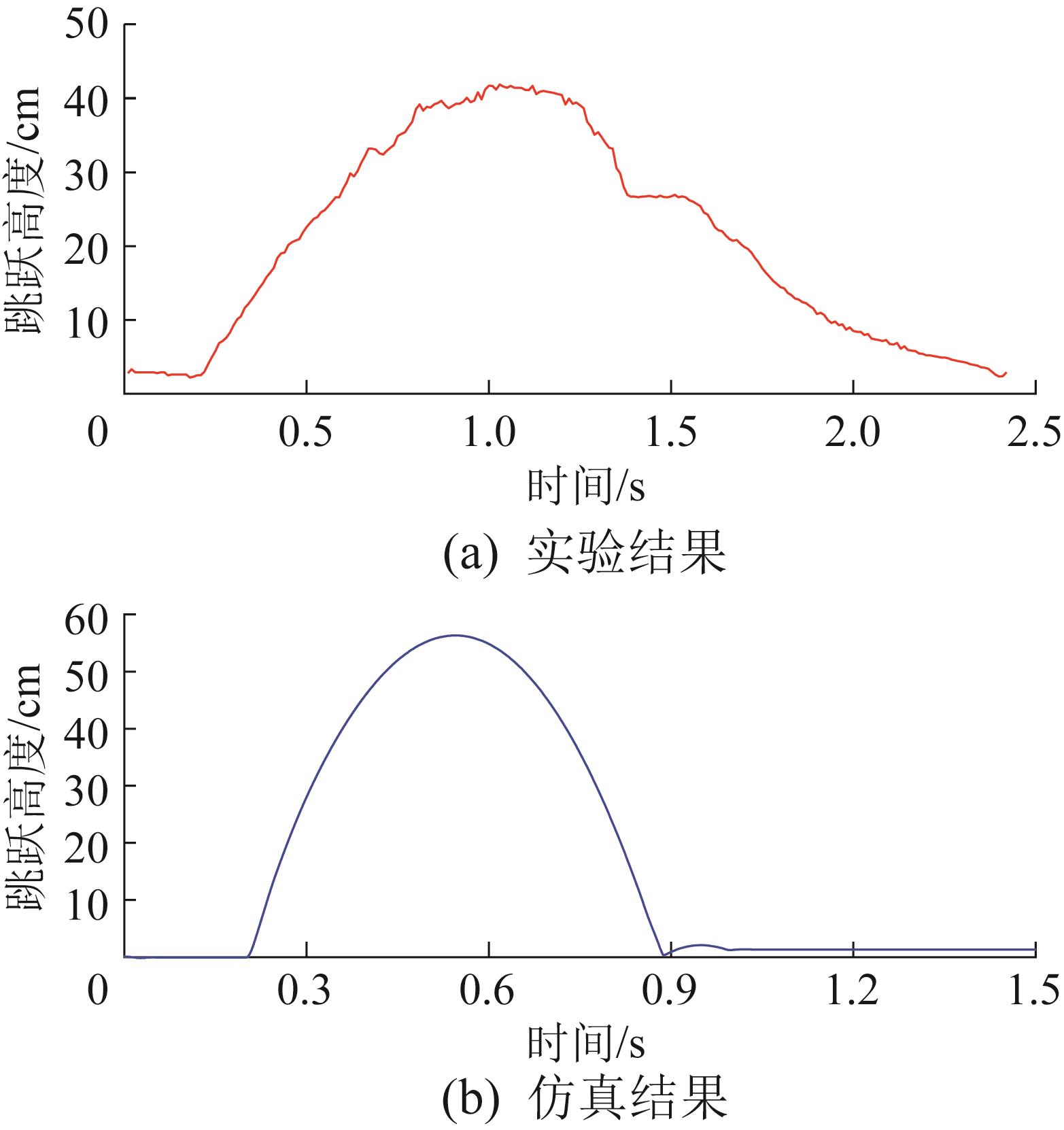
Fig.32 Comparison between experimental results and simulation results of robot jumping height
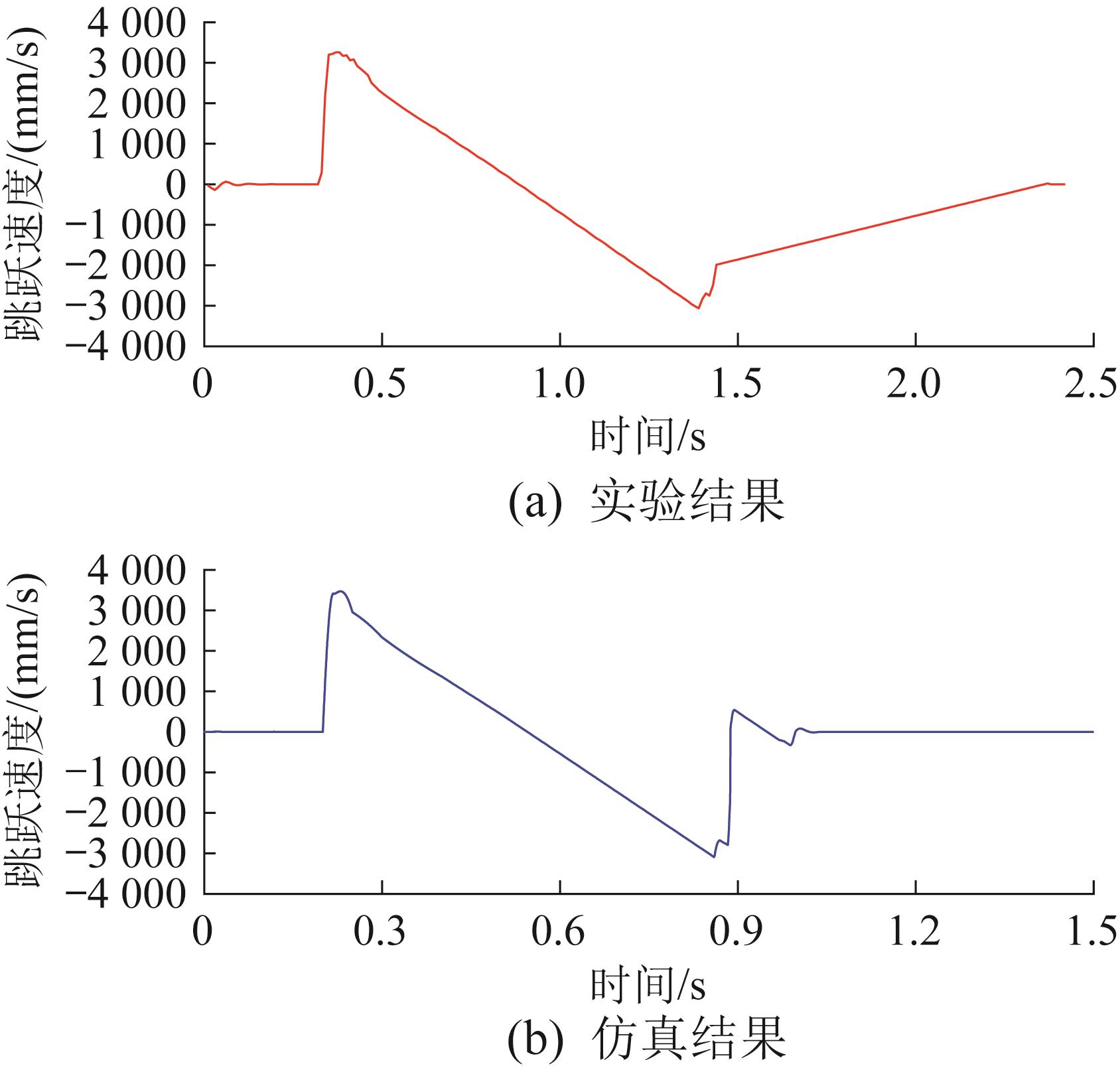
Fig.33 Comparison between experimental results and simulation results of robot jumping velocity
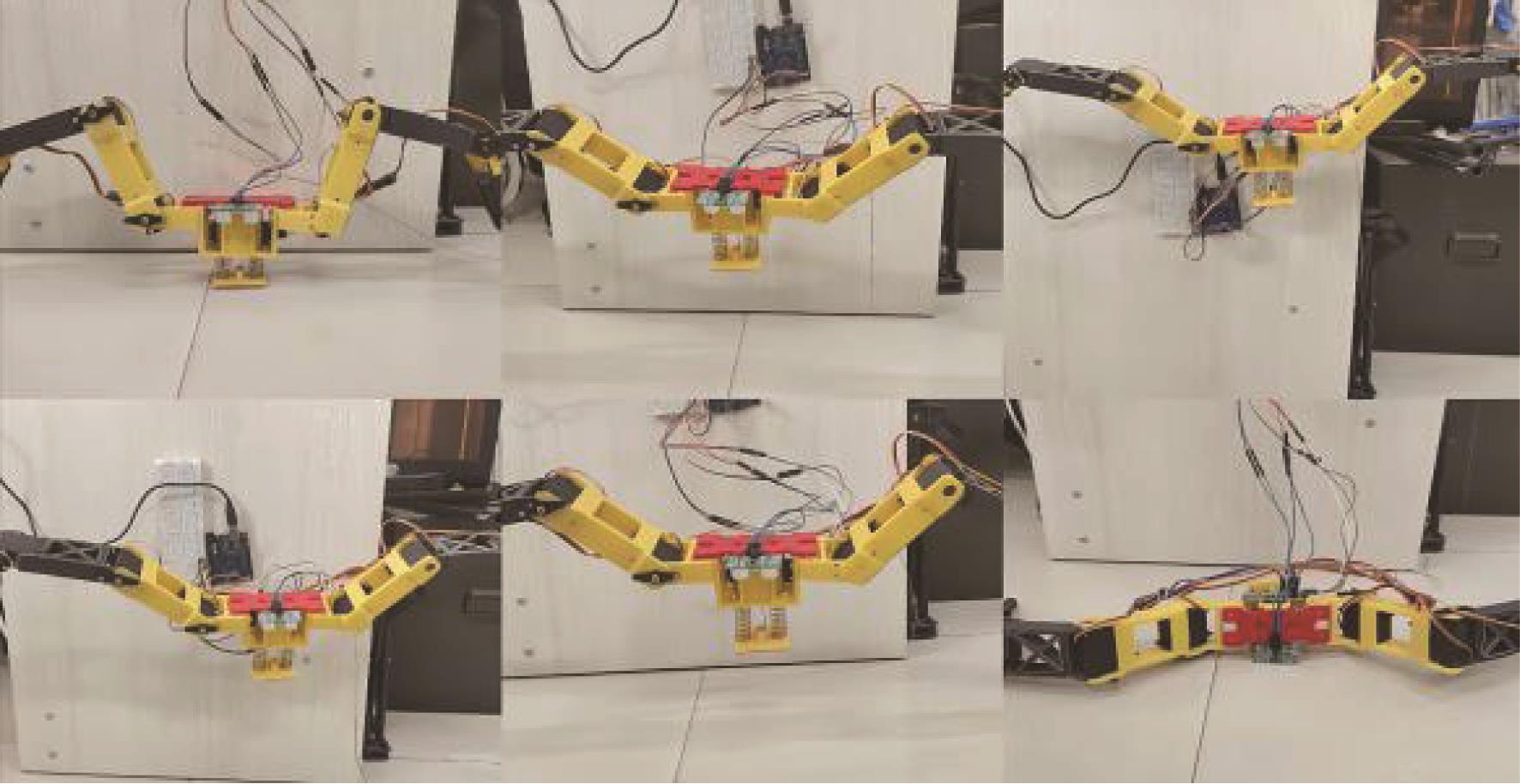
Fig.34 Jumping postures of model
[[1]]
简珣. 仿生机器人研究综述及发展方向[J]. 机器人技术与应用, 2022(3): 17-20. JIAN X. Review and development direction of bionic robot research[J]. Robot Technique and Application, 2022(3): 17-20.
[[2]]
张建, 周俊杰, 苑士华, 等. 水陆两栖仿生机器人构形、运动机理及建模控制综述[J]. 机器人, 2023, 45(3): 367-384. ZHANG J, ZHOU J J, YUAN S H, et al. Review of configuration, motion mechanism, modeling and control of amphibious bionic robots[J]. Robot, 2023, 45(3): 367-384.
[[3]]
CUI Z A, LI L, WANG Y H, et al. Review of research and control technology of underwater bionic robots[J]. Intelligent Marine Technology and Systems, 2023, 1(1): 7.
[[4]]
莫小娟, 葛文杰, 任逸飞, 等. 基于起跳稳定性的仿蝗虫八杆跳跃机器人设计[J]. 机械工程学报, 2023, 59(5): 41-52. doi:10.3901/jme.2023.05.041 MO X J, GE W J, REN Y F, et al. Design of locust-inspired eight-bar jumping robot based on take-off stability[J]. Journal of Mechanical Engineering, 2023, 59(5): 41-52.
doi: 10.3901/jme.2023.05.041
[[5]]
莫小娟, 葛文杰, 赵东来, 等. 微小型跳跃机器人研究现状综述[J]. 机械工程学报, 2019, 55(15): 109-123. doi:10.3901/jme.2019.15.109 MO X J, GE W J, ZHAO D L, et al. Review: research status of miniature jumping robot[J]. Journal of Mechanical Engineering, 2019, 55(15): 109-123.
doi: 10.3901/jme.2019.15.109
[[6]]
ZHANG C, ZOU W, MA L P, et al. Biologically inspired jumping robots: a comprehensive review[J]. Robotics and Autonomous Systems, 2020, 124: 103362.
[[7]]
WANG W P, WANG Y J, FANG C, et al. Designing and analyzing for a bar linkage obstacle-surmounting robot with the same phase in all the wheels[J]. IOP Conference Series: Materials Science and Engineering, 2018, 382: 042062.
[[8]]
牛丽周, 丁亮, 高海波, 等. 软体足式机器人驱动、建模与仿真研究综述[J]. 机械工程学报, 2021, 57(19): 1-20. doi:10.3901/jme.2021.19.001 NIU L Z, DING L, GAO H B, et al. Review of actuation, modeling and simulation in soft-legged robot[J]. Journal of Mechanical Engineering, 2021, 57(19): 1-20.
doi: 10.3901/jme.2021.19.001
[[9]]
CAO L J, KONG T G, ZHOU M. Research on structure design and control method of underwater exploration robot[J]. Procedia Computer Science, 2022, 208: 216-222.
[[10]]
孙俊凯, 孙泽洲, 辛鹏飞, 等. 深空着陆探测足式机器人发展综述[J]. 中国机械工程, 2021, 32(15): 1765-1775. SUN J K, SUN Z Z, XIN P F, et al. Review on development of legged robots for deep space landing exploration[J]. China Mechanical Engineering, 2021, 32(15): 1765-1775.
[[11]]
ARUNKUMAR V, RAJASEKAR D, AISHWARYA N. A review paper on mobile robots applications in search and rescue operations[J]. Advances in Science and Technology, 2023: 65-74.
[[12]]
侯英, 桂亚鹏, 王建暖. 救援机器人仿生造型设计[J]. 机械设计, 2019, 36(6): 145. HOU Y, GUI Y P, WANG J N. Bionic modeling design of rescue robot[J]. Journal of Machine Design, 2019, 36(6): 145.
[[13]]
CHEN W, CHENG H, ZHANG W C, et al. Modeling and invariably horizontal control for the parallel mobile rescue robot based on PSO-CPG algorithm[J]. Robotica, 2023, 41(11): 3501-3523.
[[14]]
王小涛, 张震, 崔宇新, 等. 月面六足机器人机构设计与行走控制方法综述[J]. 载人航天, 2023, 29(2): 264-275. WANG X T, ZHANG Z, CUI Y X, et al. Review on mechanism design and walking control method of lunar hexapod robot[J]. Manned Spaceflight, 2023, 29(2): 264-275.
[[15]]
单东升, 何亚磊. 一种六足军用机器人行走机构的设计与优化[J]. 装甲兵工程学院学报, 2018(3): 72-76. SHAN D S, HE Y L. Design and optimization of hexapod walking mechanism for military robot[J]. Journal of Academy of Armored Force Engineering, 2018(3): 72-76.
[[16]]
HALDANE D W, PLECNIK M M, YIM J K, et al. Robotic vertical jumping agility via series-elastic power modulation[J]. Science Robotics, 2016, 1(1): eaag2048.
[[17]]
KLEMM V, MORRA A, SALZMANN C, et al. Ascento: a two-wheeled jumping robot[C]//2019 International Conference on Robotics and Automation. New York: IEEE, 2019: 7515-7521.
[[18]]
CHEN Y F, GAMBOA-GONZALEZ A, WEHNER M, et al. Explosive legged robotic hopping: energy accumulation and power amplification via pneumatic augmentation[EB/OL].(2023-12-10)[2024-10-08]. .
[[19]]
李静, 李贵, 孙伟, 等. 仿婴猴单腿弹跳机器人结构设计与实现[J]. 机械传动, 2023, 47(11): 43-48, 85. LI J, LI G, SUN W, et al. Structural design and implementation of simulating galago senegalensis monkey single-leg jumping robots[J]. Journal of Mechanical Transmission, 2023, 47(11): 43-48, 85.
[[20]]
袁振宇. 仿猫跳跃机器人机构设计及仿真分析[D]. 沈阳: 沈阳工业大学, 2020. YUAN Z Y. Mechanism design and simulation analysis of cat jumping robot[D]. Shenyang: Shenyang University of Technology, 2020.
[[21]]
高峰. 基于燃爆驱动的仿蛙软体跳跃机器人设计及实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. GAO F. design and experiment of a frog-inspired soft jumping robot driven by combustion[D]. Harbin: Harbin Institute of Technology, 2021.