| Optimization Design |
|


|
|
|
| Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot |
Pei YANG( ),Minglu ZHANG,Lingyu SUN() ),Minglu ZHANG,Lingyu SUN() |
| School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China |
|
|
|
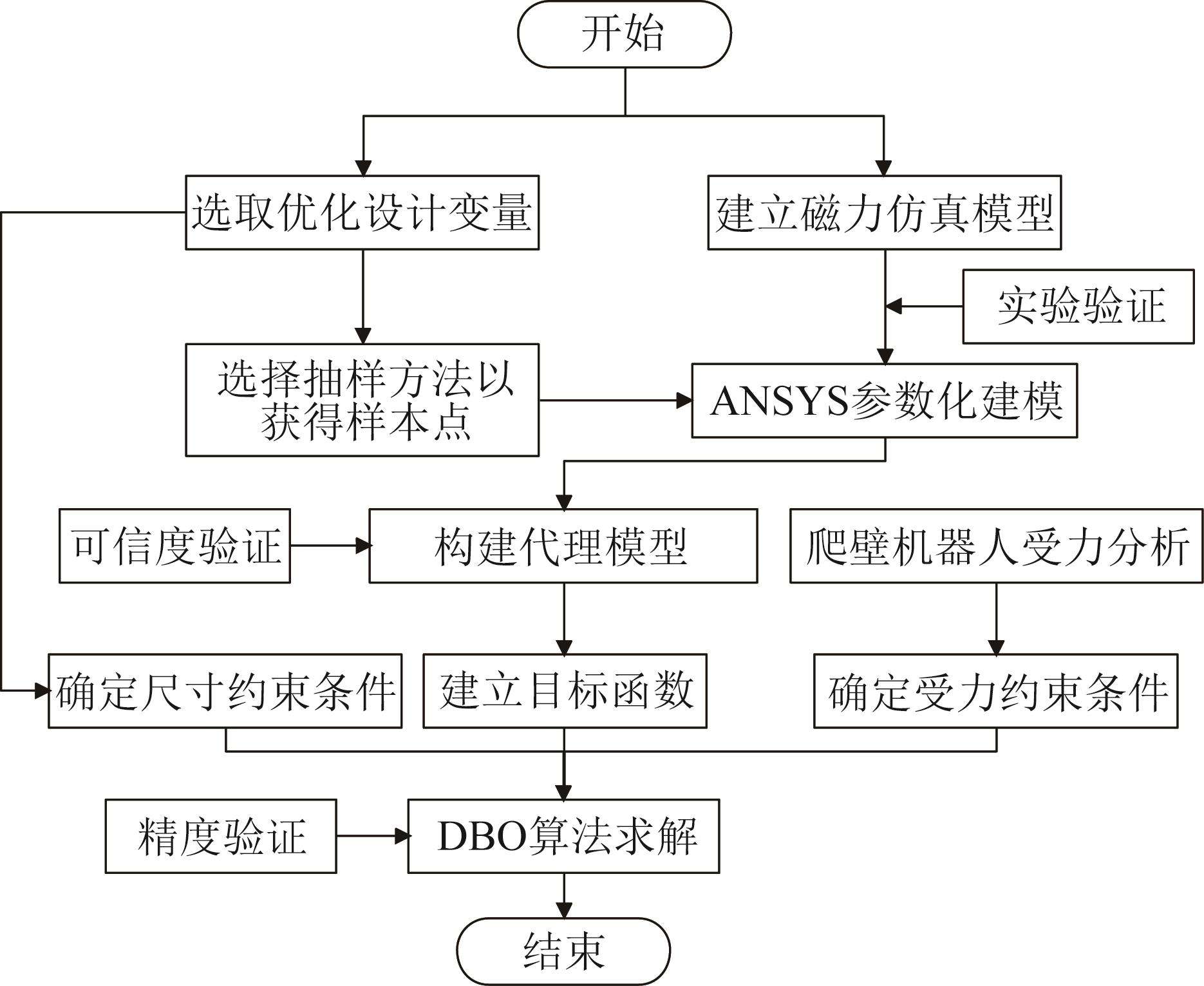
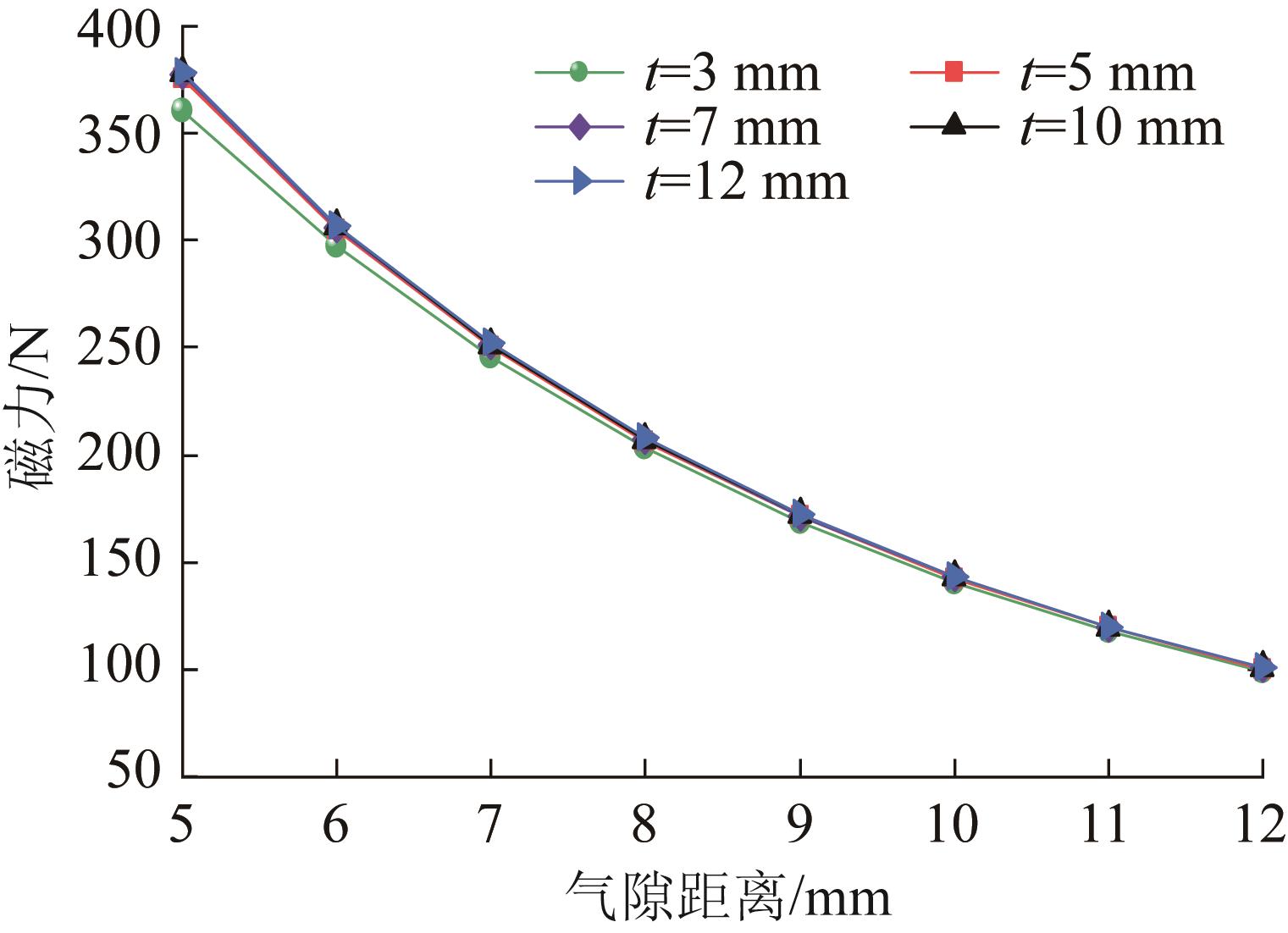
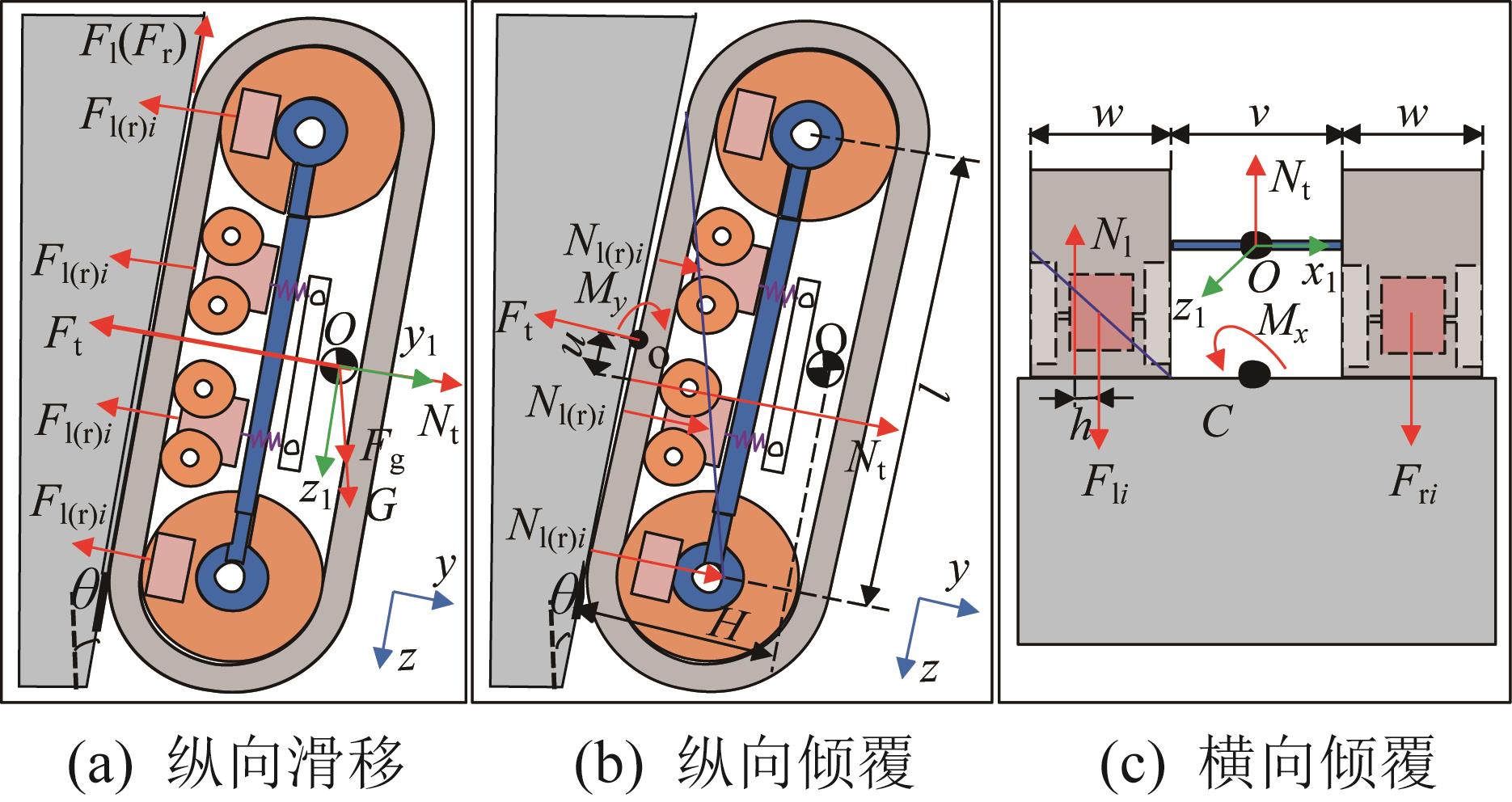
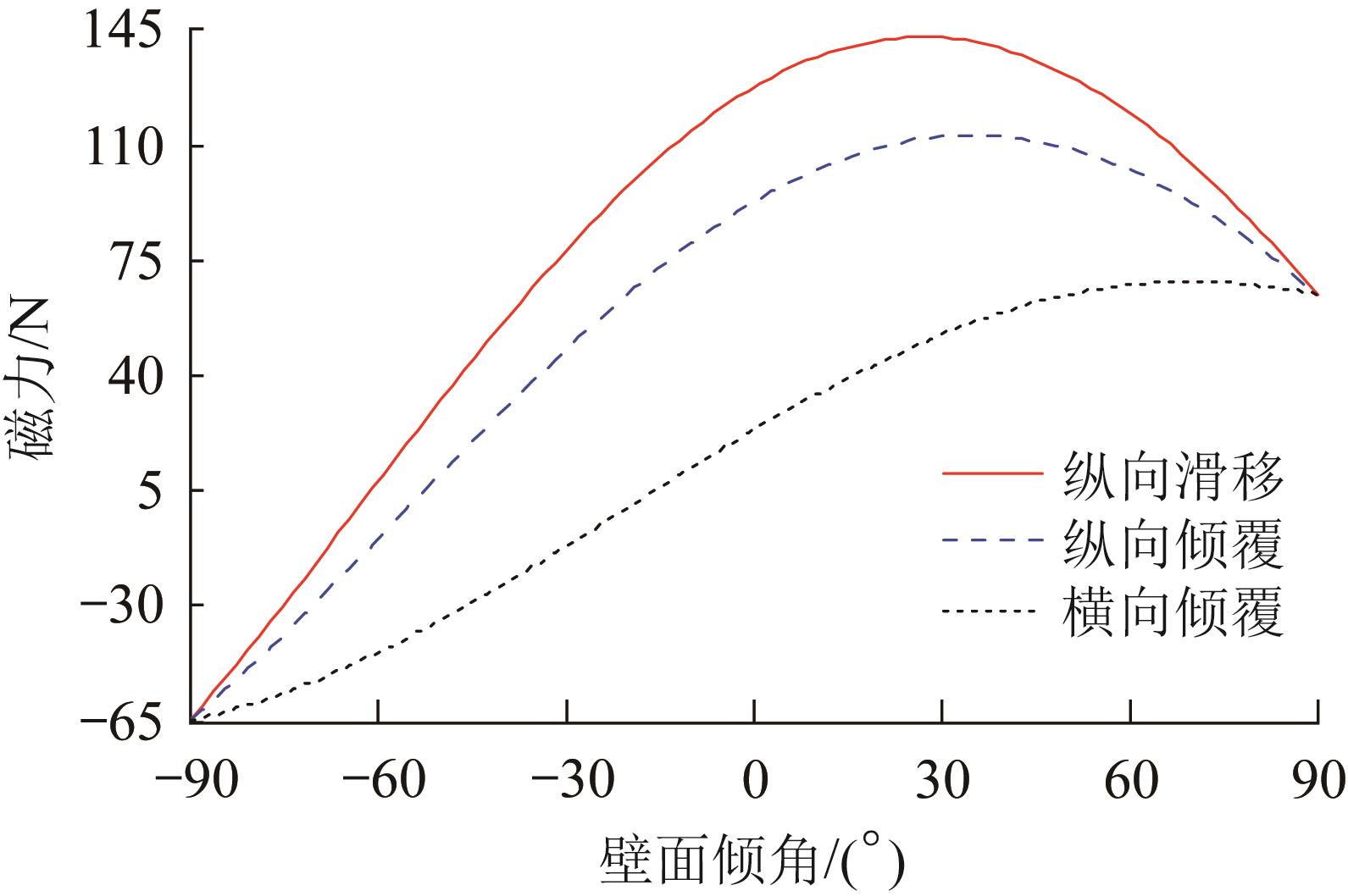
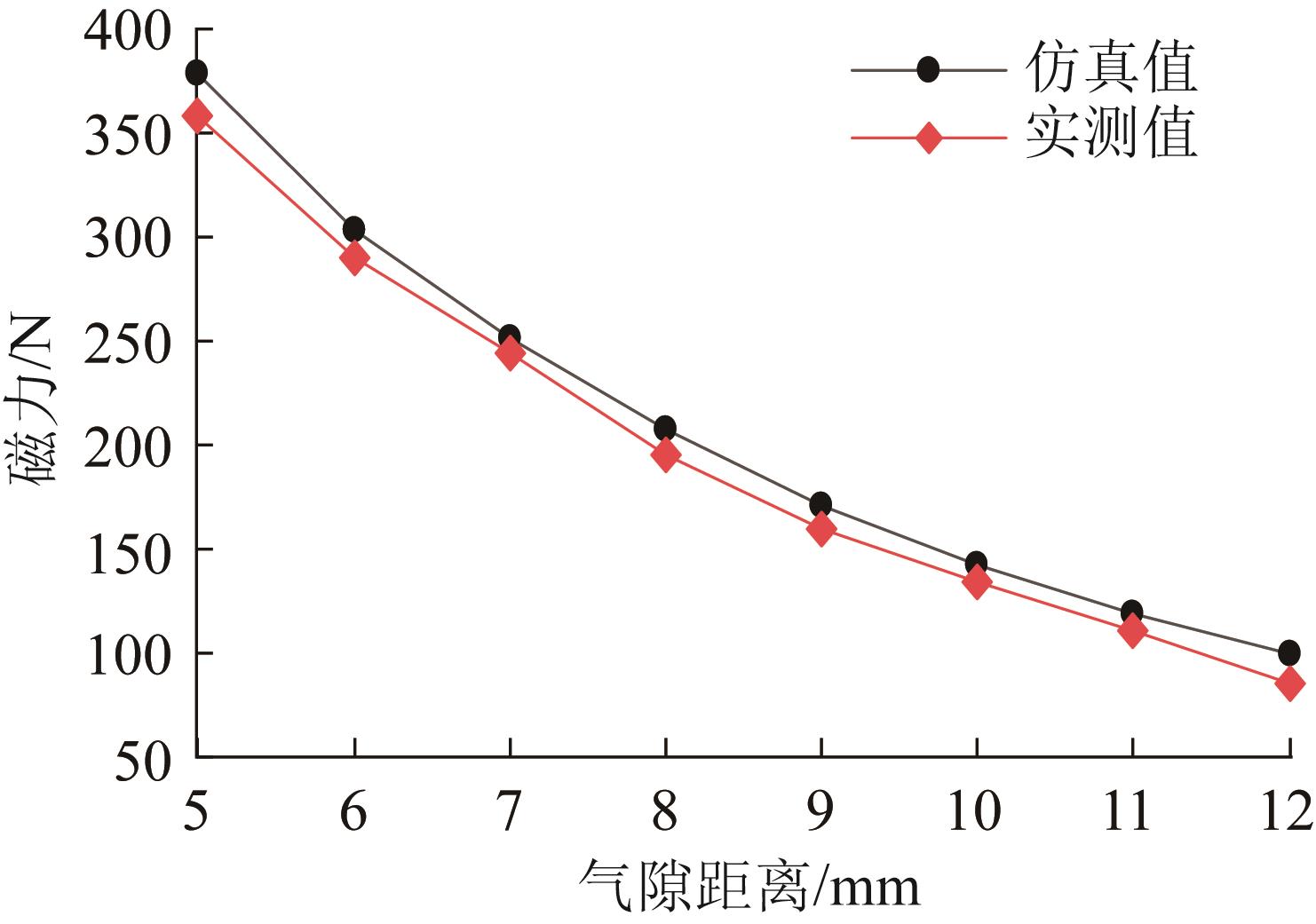
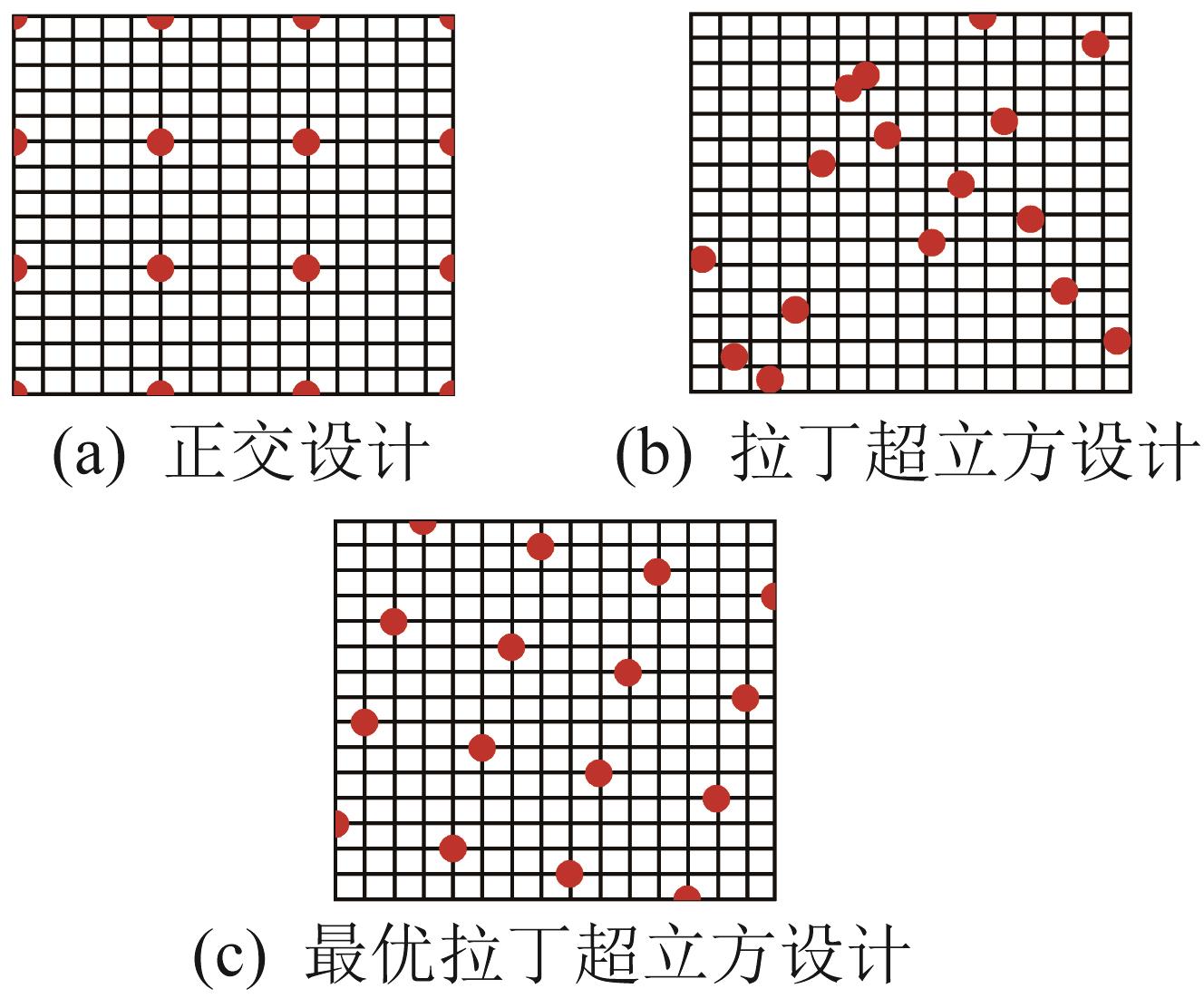
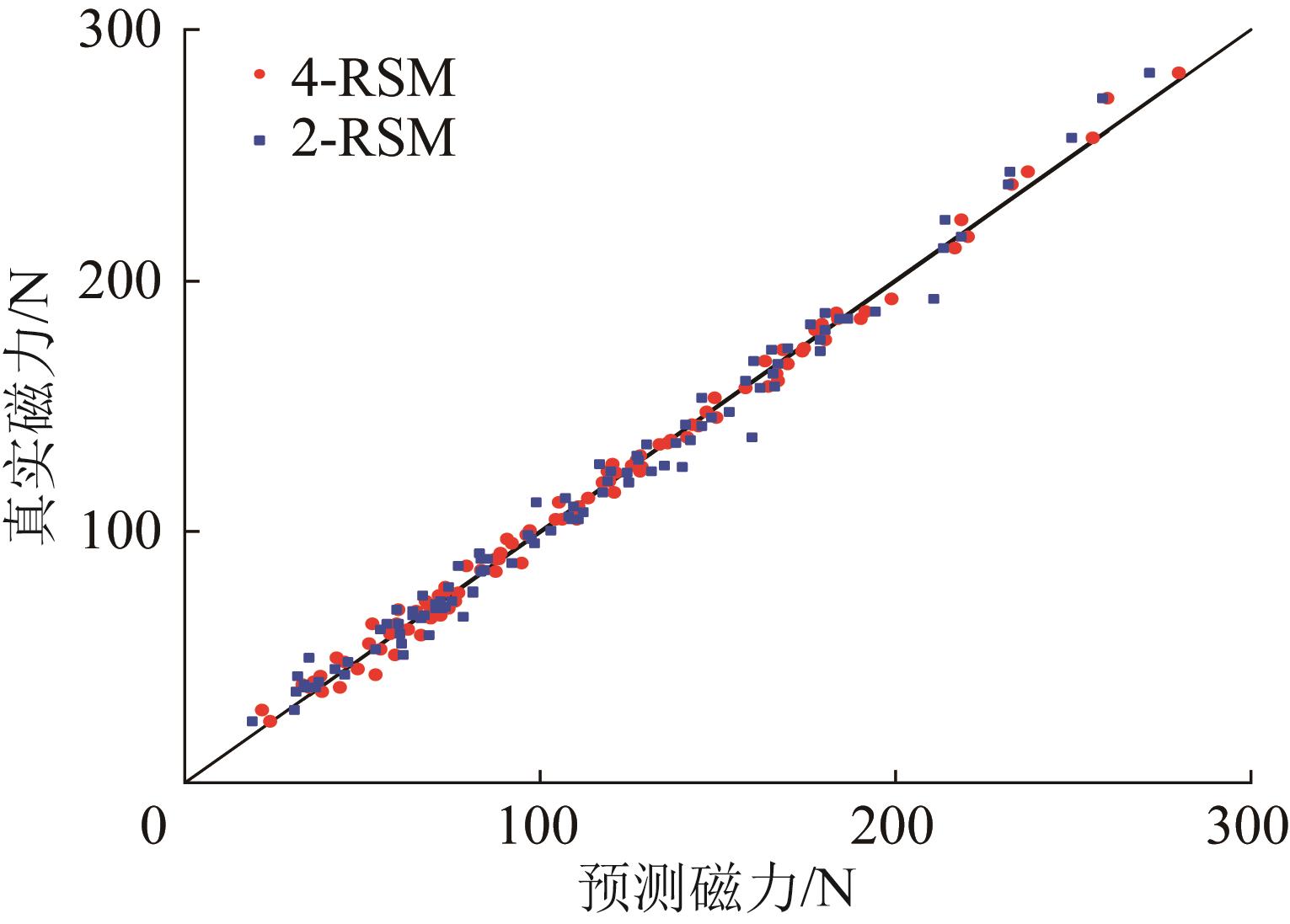
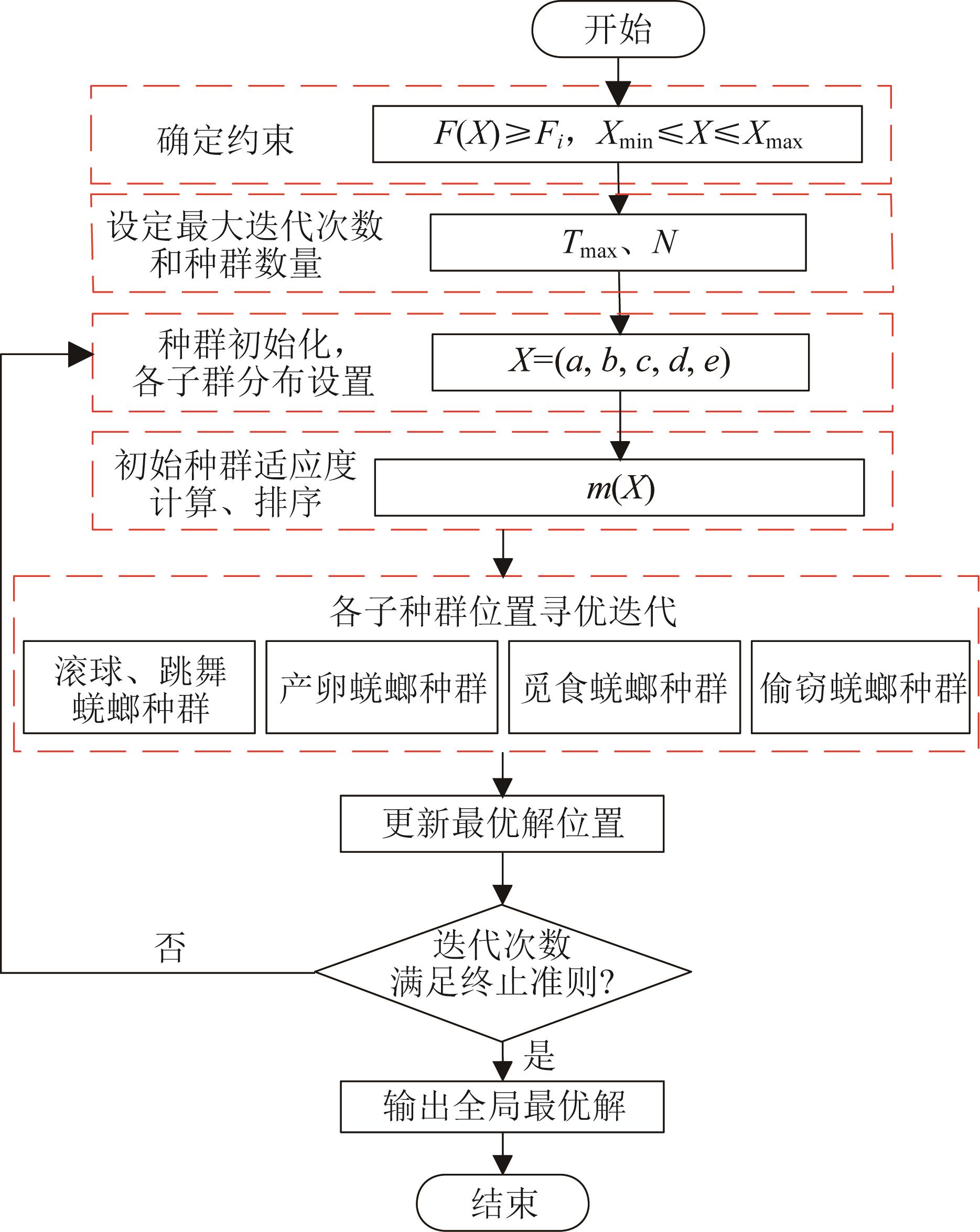
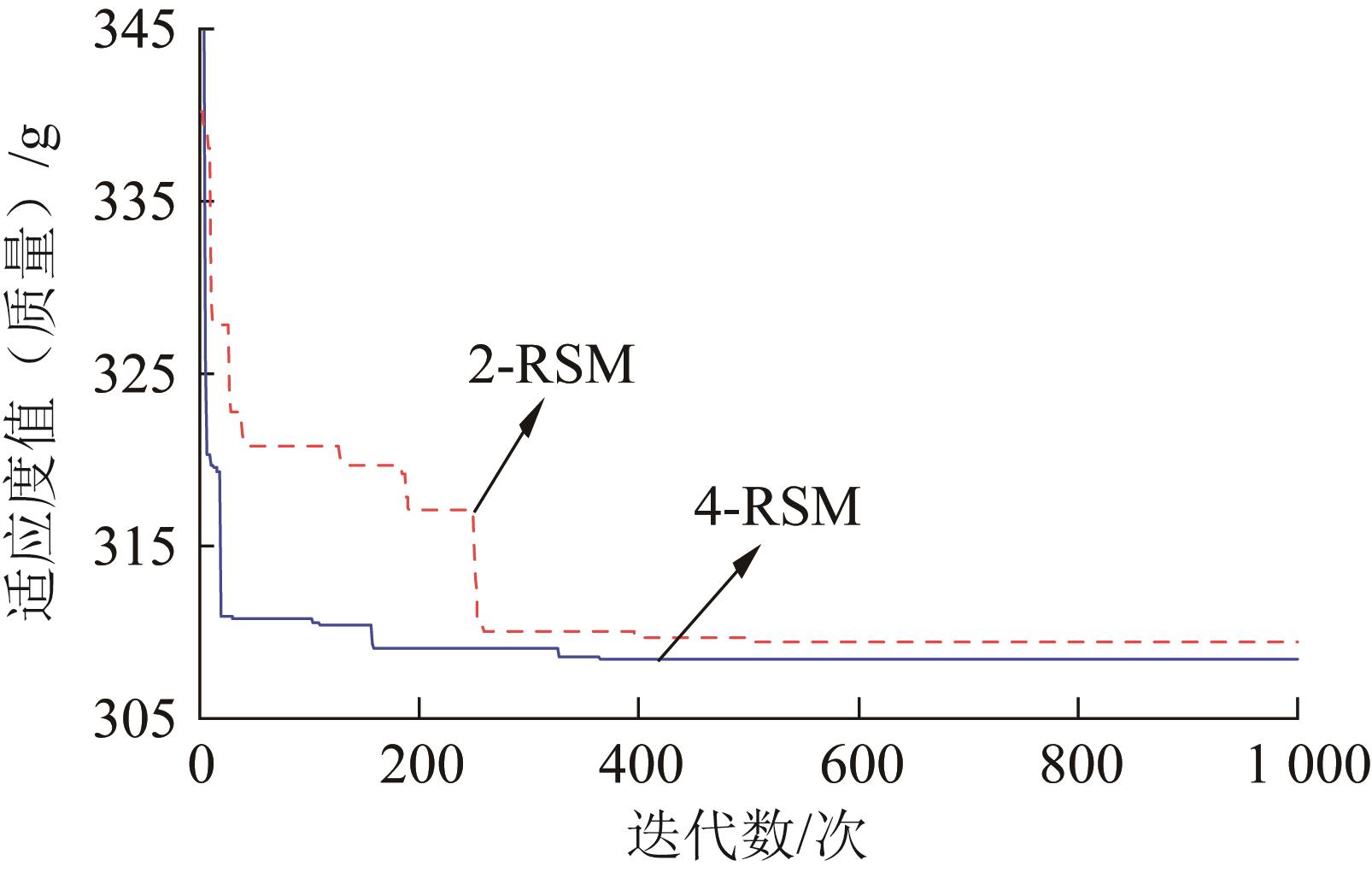
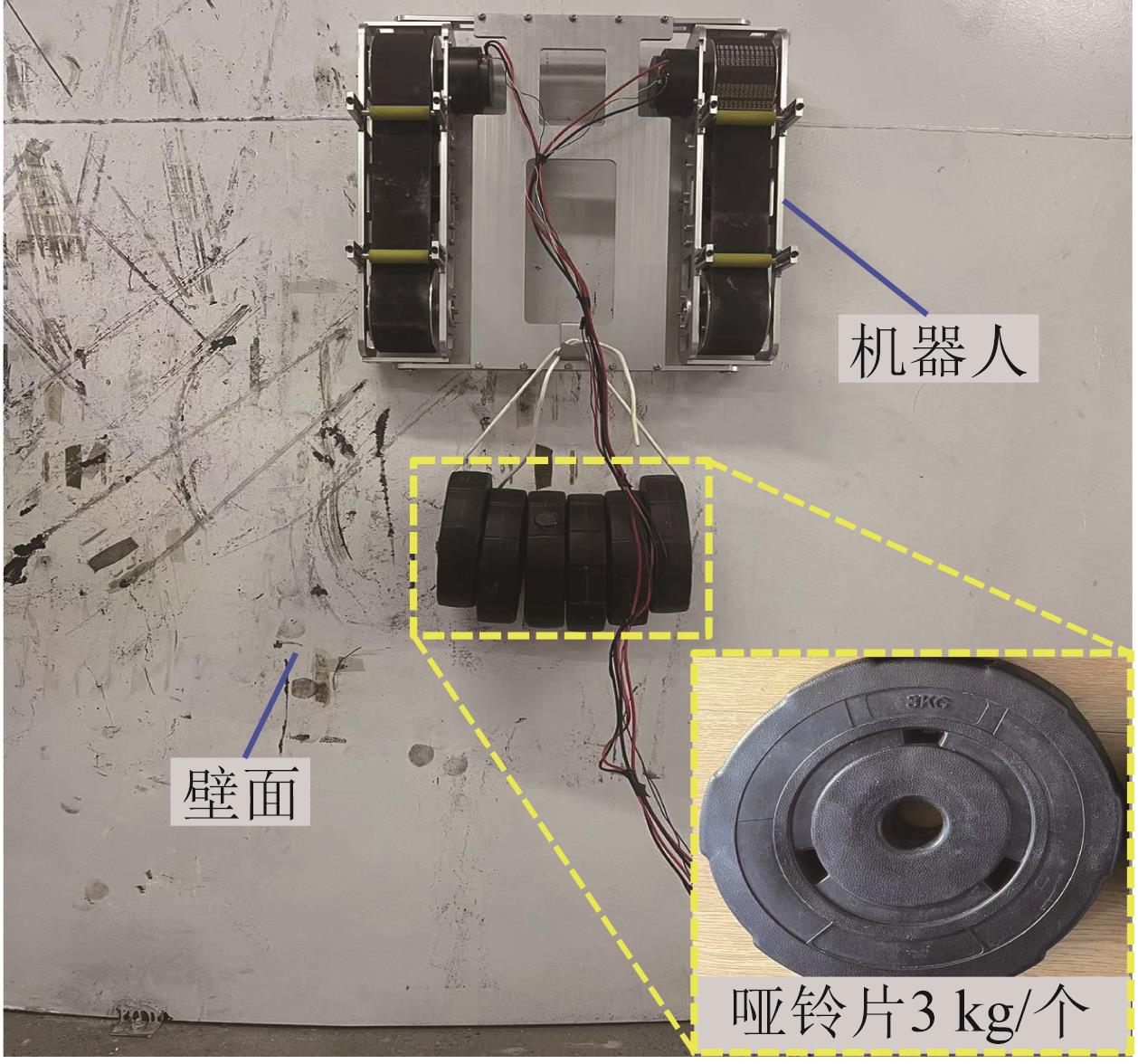
Abstract As a vital component of the magnetic adsorption wall-climbing robot, the structure of the magnetic adsorption module usually affects the overall mass and adsorption stability of the robot. Aiming at the problems of complex magnetic circuit coupling relationship and complicated optimization design of magnetic adsorption modules, a magnetic adsorption module structure optimization method is proposed by combining virtual simulation technology, surrogate model and dung beetle optimization algorithm to improve the efficiency of magnetic force calculation and optimization design process. Firstly, the structure design scheme for the wall-climbing robot was introduced, and through the simulation analysis of the existing Halbach array magnetic circuit modes, it was determined that the three-magnetic circuit mode had relatively high adsorption efficiency. At the same time, the magnetic force simulation model of the magnetic adsorption module was experimentally verified based on the initial parameters, which laid the foundation for establishing subsequent surrogate models. Then, an optimization model with the robot's adsorption stability and structural parameters as constraints and the lightweight of the magnetic adsorption module as objective was established. A fourth-order response surface model between the magnetic force and the structural parameters of the magnetic adsorption module was established by the optimal Latin hypercube design, ANSYS parametric modeling and surrogate model technology, and its credibility was verified. The structural parameter optimization model of the magnetic adsorption module was solved by using the dung beetle optimization algorithm. The results showed that the prediction error of the established surrogate model was tiny, and the relationship between the magnetic force and the structural parameters of the magnetic adsorption module could be well expressed. After optimization, the mass of the magnetic adsorption module was reduced by 12.7%. Finally, the correctness of the optimization process was verified through robot load experiments. The research results can provide reference for the magnetic force analysis and structure optimization of other magnetic adsorption robots.
|
|
Received: 26 December 2023
Published: 30 October 2024
|
|
|
|
Corresponding Authors:
Lingyu SUN
E-mail: yang_p1993@163.com;sunly@hebut.edu.cn
|
爬壁机器人磁吸附模块设计分析与结构参数优化
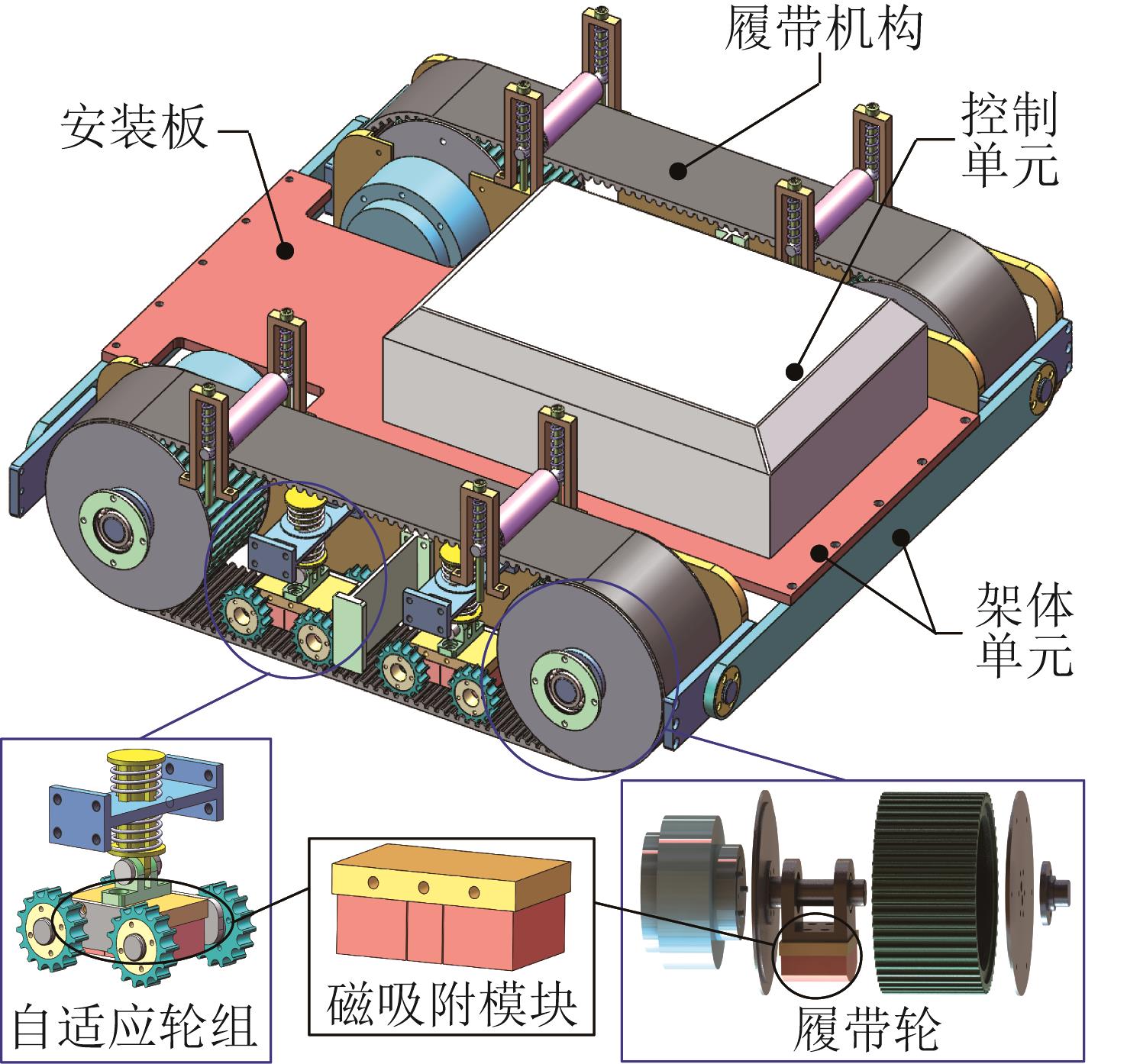
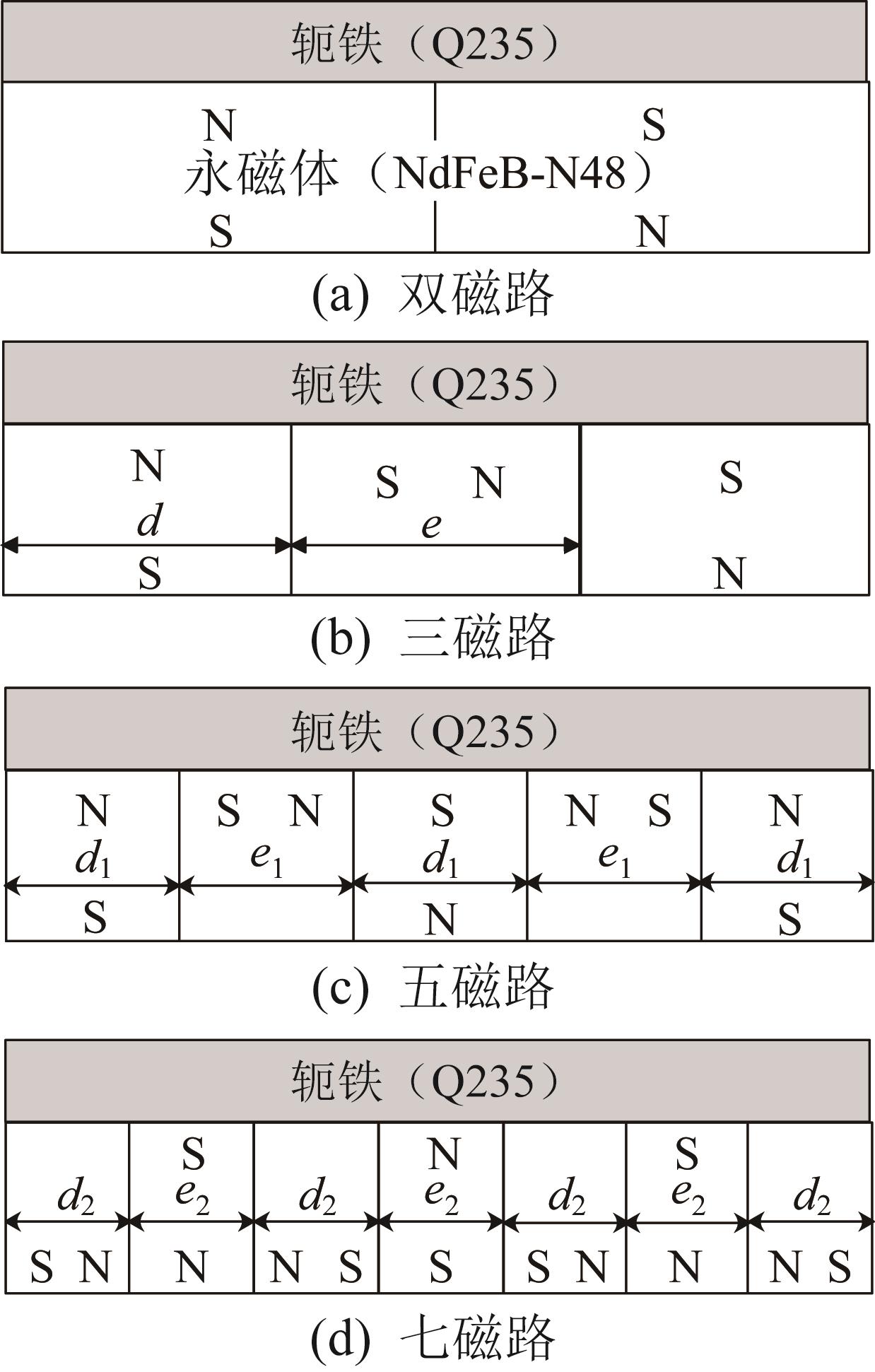
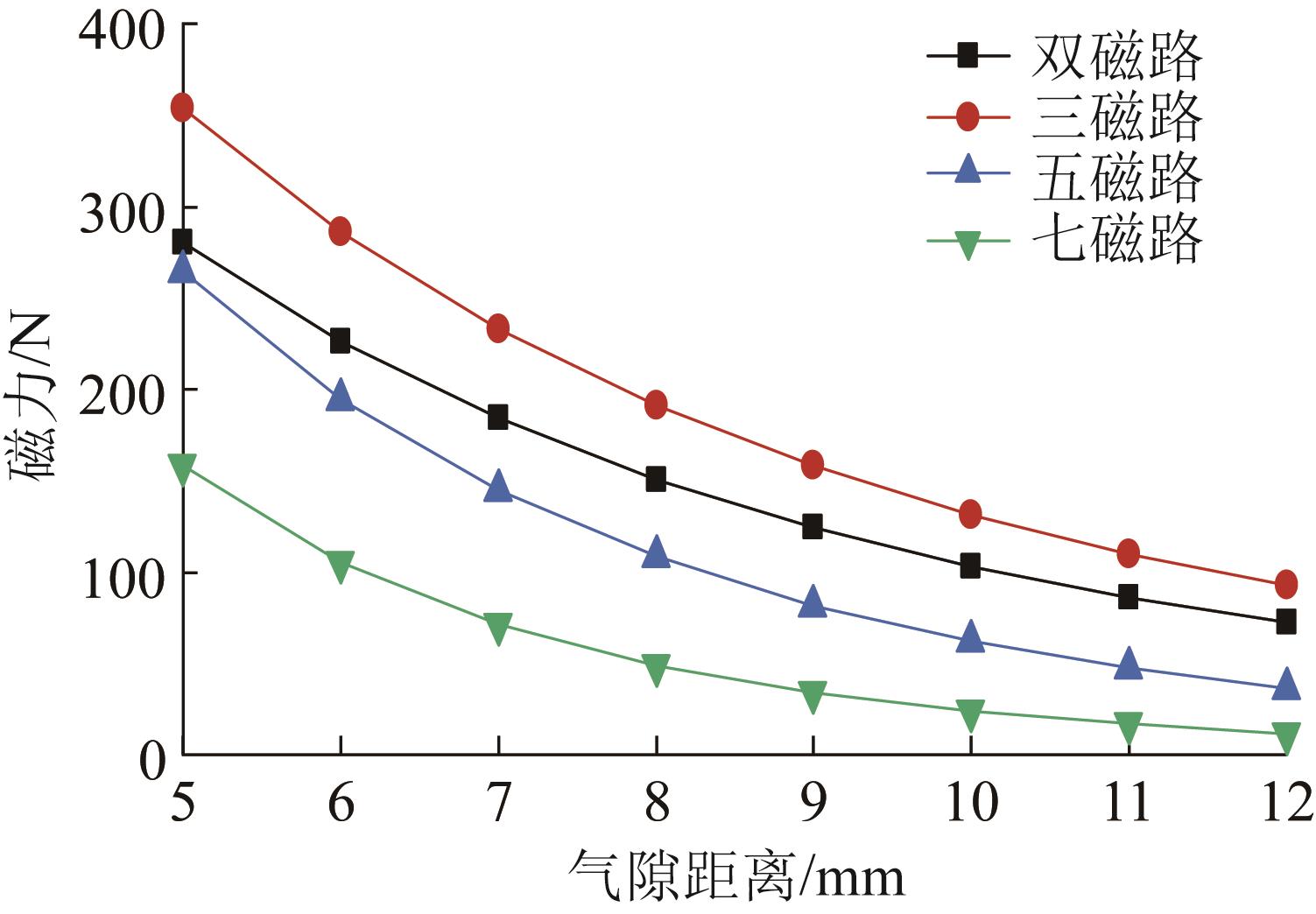
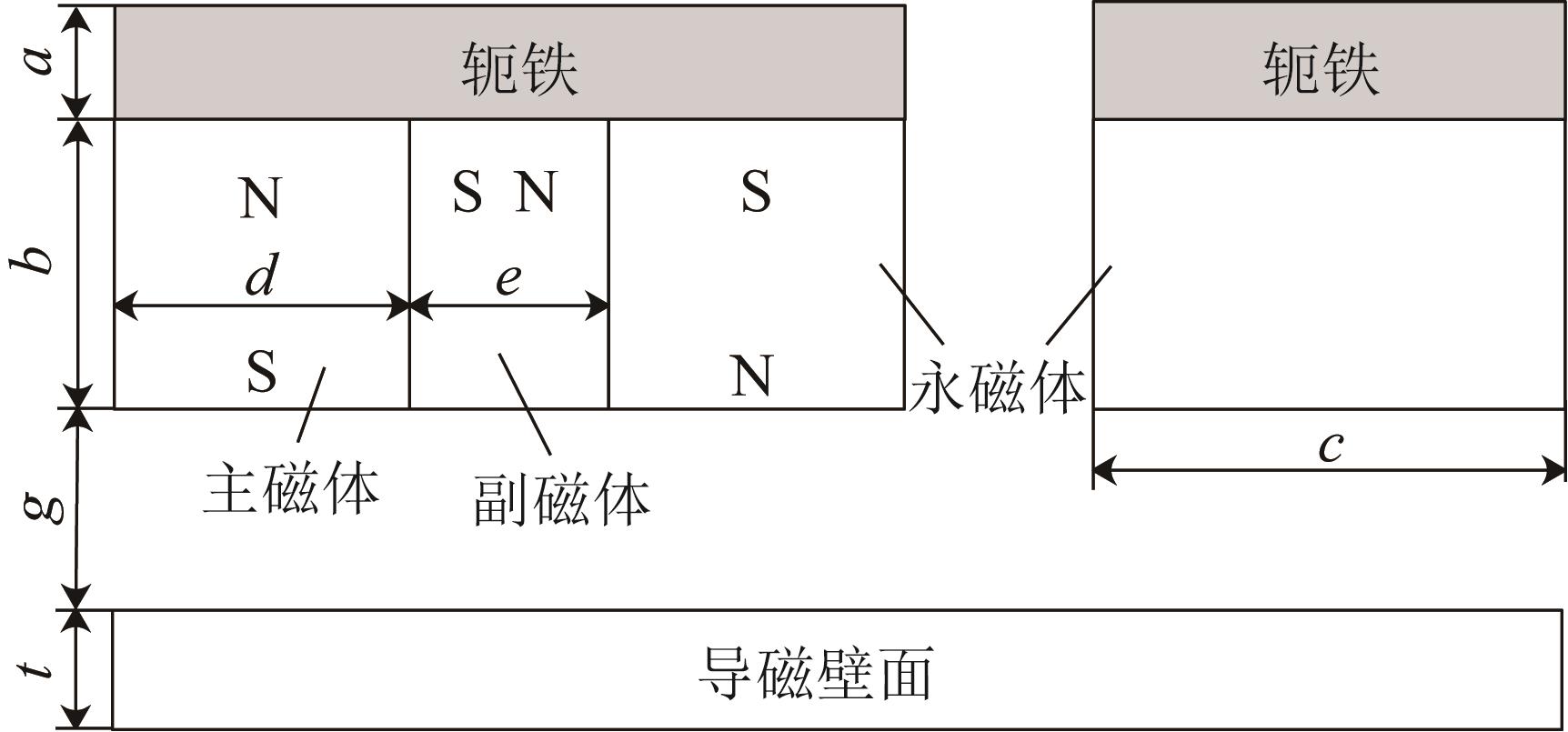
作为磁吸附式爬壁机器人的关键部件,磁吸附模块的结构通常会影响机器人的整体质量及吸附稳定性。针对磁吸附模块磁路耦合关系复杂、优化设计困难等问题,结合虚拟仿真技术、代理模型和蜣螂优化算法提出了一种磁吸附模块结构优化方法,以提高其磁力计算和优化设计过程的效率。首先,介绍了爬壁机器人的结构设计方案,并通过对现有的Halbach阵列磁路模式进行仿真分析,确定了三磁路模式具有相对较高的吸附效率;同时,基于初设参数对磁吸附模块磁力仿真模型进行了实验验证,为后续代理模型的建立奠定了基础。然后,建立了以机器人吸附稳定性和结构参数为约束、以磁吸附模块轻量化为目标的优化模型。采用最优拉丁超立方设计、ANSYS参数化建模以及代理模型技术建立了磁吸附模块磁力与结构参数之间的四阶响应面模型,并对其可信度进行了验证。利用蜣螂优化算法对磁吸附模块的结构参数优化模型进行了求解。结果表明,所建立的代理模型的预测误差很小,能够较好地表征磁吸附模块磁力与结构参数之间的关系;优化后磁吸附模块的质量减小了12.7%。最后,通过机器人负载实验验证了优化过程的正确性。研究结果可为其他磁吸附式机器人的磁力分析与结构优化提供参考。
关键词:
爬壁机器人,
磁吸附模块,
代理模型,
参数优化,
磁路仿真分析
|
|
| [1] |
陈咏华, 孙振国, 张文, 等. 爬壁机器人焊缝高效修形技术研究[J]. 机械工程学报, 2023, 59(9): 12-19. doi:10.3901/jme.2023.09.012
CHEN Y H, SUN Z G, ZHANG W, et al. Research on high efficiency weld modification technology for wall-climbing robot[J]. Journal of Mechanical Engineering, 2023, 59(9): 12-19.
doi: 10.3901/jme.2023.09.012
|
|
|
| [2] |
刘志辉, 蔡伟, 付兴伟, 等. 一种滚动密封爬壁机器人失效分析[J]. 中国机械工程, 2022, 33(22): 2755-2763, 2771.
LIU Z H, CAI W, FU X W, et al. Failure analysis of a rolling sealed wall climbing robots[J]. China Mechanical Engineering, 2022, 33(22): 2755-2763, 2771.
|
|
|
| [3] |
王洋, 张小俊, 张明路, 等. 可自适应变曲率立面的分体柔性爬壁机器人设计与分析[J]. 机械工程学报, 2021, 57(3): 49-58. doi:10.3901/jme.2021.03.049
WANG Y, ZHANG X J, ZHANG M L, et al. Design and analysis of split-flexible wall-climbing robot with adaptive variable curvature facade[J]. Journal of Mechanical Engineering, 2021, 57(3): 49-58.
doi: 10.3901/jme.2021.03.049
|
|
|
| [4] |
姜泽, 王珉, 赵哲, 等. 爬壁机器人发展现状与关键技术研究综述[J]. 包装工程, 2023, 44(12): 29-38, 117, 8.
JIANG Z, WANG M, ZHAO Z, et al. Review on development status and key technologies of wall-climbing robots[J]. Packaging Engineering, 2023, 44(12): 29-38, 117, 8.
|
|
|
| [5] |
马吉良, 彭军, 郭艳婕, 等. 爬壁机器人研究现状及发展趋势[J]. 机械工程学报, 2023, 59(5): 11-28. doi:10.3901/jme.2023.05.011
MA J L, PENG J, GUO Y J, et al. Research status and development trend of wall climbing robot[J]. Journal of Mechanical Engineering, 2023, 59(5): 11-28.
doi: 10.3901/jme.2023.05.011
|
|
|
| [6] |
周依霖, 张华, 叶艳辉, 等. 永磁吸附履带式爬壁机器人转向动力特性分析[J]. 机械设计, 2017, 34(2): 56-61.
ZHOU Y L, ZHANG H, YE Y H, et al. Steering dynamic characteristics analysis of permanent magnetic tracked wall-climbing robot[J]. Journal of Machine Design, 2017, 34(2): 56-61.
|
|
|
| [7] |
LU X R, GUO D H, CHEN Y. Design and optimization of the magnetic adsorption mechanism of a pipeline-climbing robot[J]. Journal of Mechanical Science and Technology, 2021, 35(11): 5161-5171.
|
|
|
| [8] |
张栋, 杨培, 黄哲轩, 等. 爬壁机器人悬摆式磁吸附机构的设计与优化[J]. 工程设计学报, 2023, 30(3): 334-341.
ZHANG D, YANG P, HUANG Z X, et al. Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots[J]. Chinese Journal of Engineering Design, 2023, 30(3): 334-341.
|
|
|
| [9] |
SAHBEL A, ABBAS A, SATTAR T. Experimental and numerical optimization of magnetic adhesion force for wall climbing robot applications[J]. International Journal of Mechanical Engineering and Robotics Research, 2019, 8(1): 18-24.
|
|
|
| [10] |
HALBACH K. Strong rare earth cobalt quadrupoles[J]. IEEE Transactions on Nuclear Science, 1979, 26(3): 3882-3884.
|
|
|
| [11] |
钟道方, 田颖, 张明路. 轮腿式爬壁机器人的永磁吸附装置设计与优化[J]. 工程设计学报, 2022, 29(1): 41-50.
ZHONG D F, TIAN Y, ZHANG M L. Design and optimization of permanent magnet adsorption device for wheel-legged wall-climbing robot[J]. Chinese Journal of Engineering Design, 2022, 29(1): 41-50.
|
|
|
| [12] |
潘柏松, 张晋, 魏凯, 等. 基于Halbach阵列爬壁机器人永磁轮吸附单元的设计与优化[J]. 浙江工业大学学报, 2015, 43(4): 393-397, 474. doi:10.3969/j.issn.1006-4303.2015.04.009
PAN B S, ZHANG J, WEI K, et al. The optimization of a novel permanent-magnetic wheel adsorption unit for wall-climbing robot based on Halbach array[J]. Journal of Zhejiang University of Technology, 2015, 43(4): 393-397, 474.
doi: 10.3969/j.issn.1006-4303.2015.04.009
|
|
|
| [13] |
陈勇. Halbach阵列机器人磁吸附单元理论分析与实验研究[D]. 南京: 南京理工大学, 2013.
CHEN Y. Theoretical and experiment research on magnetic adhesion device for wall-climbing robot based on Halbach array[D]. Nanjing: Nanjing University of Science and Technology, 2013.
|
|
|
| [14] |
JIAO S L, ZHANG X J, ZHANG X, et al. Magnetic circuit analysis of Halbach array and improvement of permanent magnetic adsorption device for wall-climbing robot[J]. Symmetry, 2022, 14(2): 429.
|
|
|
| [15] |
赵智浩, 陶友瑞, 裴佳星, 等. 履带式爬壁机器人磁吸附单元的参数分析与优化[J]. 机械强度, 2023, 45(3): 626-632.
ZHAO Z H, TAO Y R, PEI J X, et al. Parameter analysis and optimization of magnetic adsorption unit for crawler wall-climbing robot[J]. Journal of Mechanical Strength, 2023, 45(3): 626-632.
|
|
|
| [16] |
ZHAO Z H, TAO Y R, WANG J, et al. The multi-objective optimization design for the magnetic adsorption unit of wall-climbing robot[J]. Journal of Mechanical Science and Technology, 2022, 36(1): 305-316.
|
|
|
| [17] |
孙玲. 除锈爬壁机器人壁面行走控制技术研究[D]. 大连: 大连海事大学, 2015.
SUN L. Research on wall travelling control for ship rust removal wall climbing robot[D]. Dalian: Dalian Maritime University, 2015.
|
|
|
| [18] |
黄哲轩. 石化储罐壁面检测爬壁机器人设计及其特性研究[D]. 天津: 河北工业大学, 2018.
HUANG Z X. Wall-climbing robot design and property study based on surface testing of petrochemical tank[D]. Tianjin: Hebei University of Technology, 2018.
|
|
|
| [19] |
PALAR P S, SHIMOYAMA K. On efficient global optimization via universal Kriging surrogate models[J]. Structural and Multidisciplinary Optimization, 2018, 57: 2377-2397.
|
|
|
| [20] |
KEANE A J, VOUTCHKOV I I. Robust design optimization using surrogate models[J]. Journal of Computational Design and Engineering, 2020, 7(1): 44-55.
|
|
|
| [21] |
张扬. 多参数非线性系统全局敏感性分析与动态代理模型研究[D]. 长沙: 湖南大学, 2014.
ZHANG Y. The study on global sensitivity analysis and dynamic metamodel of multiple-parameters nonlinear system[D]. Changsha: Hunan University, 2014.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|