| Optimization Design |
|

|
|
|
| Improved design and longitudinal pitch optimization of underdriven ROV |
Zhe XU1( ),Wei DAI1,Yu CAO1,Yongguo LI1(),Shun ZHANG2 ),Wei DAI1,Yu CAO1,Yongguo LI1(),Shun ZHANG2 |
1.College of Engineering Science and Technology, Shanghai Ocean University, Shanghai 201306, China
2.AutoSubsea Vehicles Inc. , Shanghai 201306, China |
|
|
|
Abstract Aiming at the problems of large changes in longitudinal pitch amplitude and longitudinal pitch angle caused by the flow field when the remotely operated vehicle (ROV) sails at high speed, a method for achieving high speed underdriven ROV operated with zero longitudinal pitch or slight longitudinal pitch by matching and selecting structural parameters of the extended chassis and the tailplane was proposed. Based on the lattice Boltzmann method (LBM), a six-degree-of-freedom simulation experiment was carried out by using the wall adaptive refinement algorithm combined with the structural parameters of the ROV to simulate the ROV sailing motion. The numerical analysis for the ROV with different height of extended chassis and tailplane was analyzed numerically to obtain the relationship between the structural parameters of extended chassis and tailplane and the longitudinal pitch amplitude and longitudinal pitch angle. By comparing the rotating torque of ROVs with similar sailing performance, the relationship between ROV stability and tailplane height was determined under the same extended chassis conditions. The orthogonal experiments for structure optimization of the extended chassis and tailplane were conducted, and the longitudinal pitch data of the ROV under different experimental schemes were fitted by using genetic algorithm. Combined with the actual requirements, the height of the extended chassis and tailplane was determined, and the correctness of the ROV longitudinal pitch design scheme was verified by the actual test. The results showed that the reasonable match of the extended chassis and tailplane structure could effectively reduced the longitudinal pitch amplitude of underdriven ROVs, so as to achieve slight longitudinal pitch sailing motion of ROVs without amplitude compensation. The research results can provide reference for improving the longitudinal pitch motion of relevant underwater devices.
|
|
Received: 31 August 2023
Published: 26 August 2024
|
|
|
|
Corresponding Authors:
Yongguo LI
E-mail: xuzhe@shou.edu.cn;yg-li@shou.edu.cn
|
欠驱动型ROV改进设计与纵倾优化
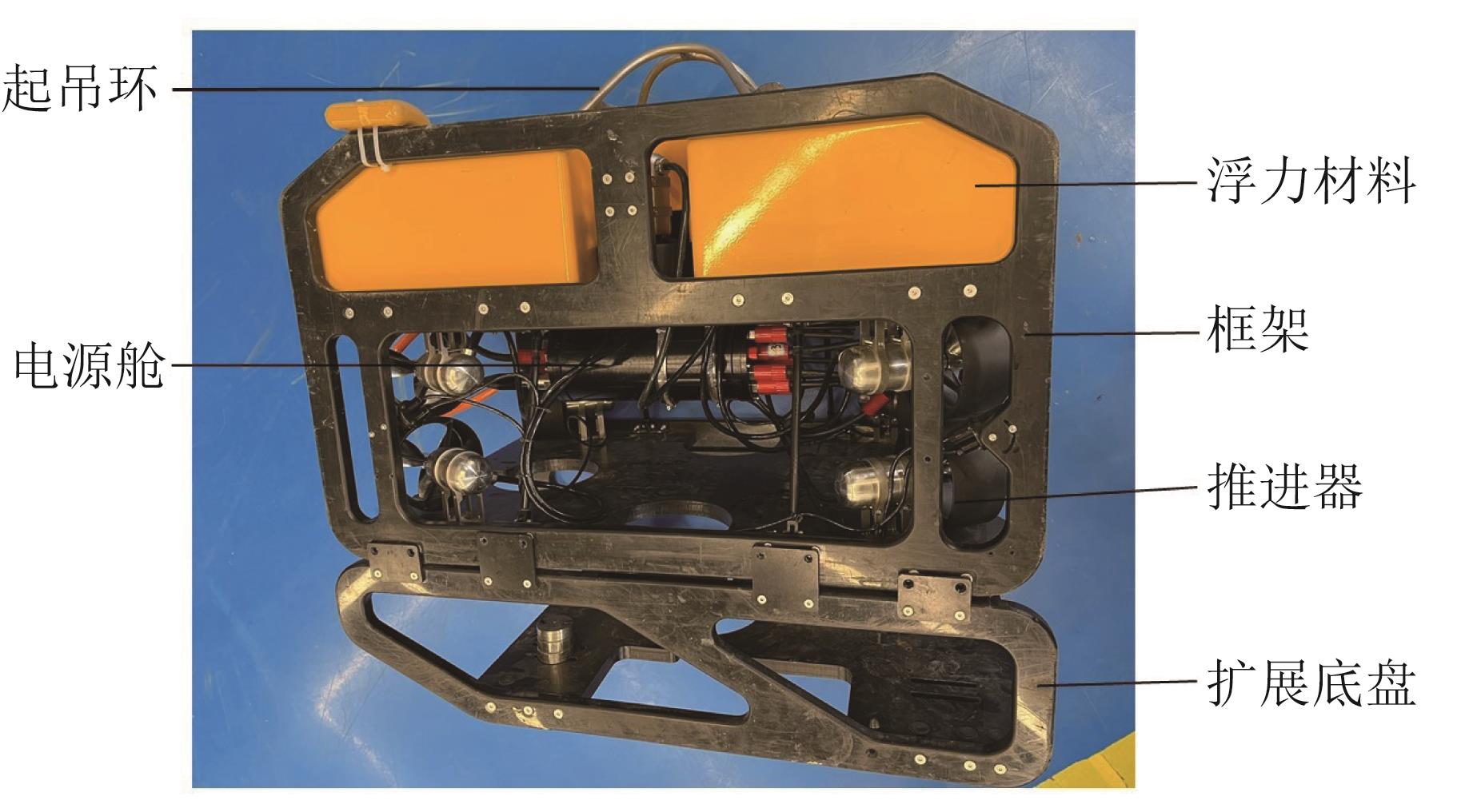
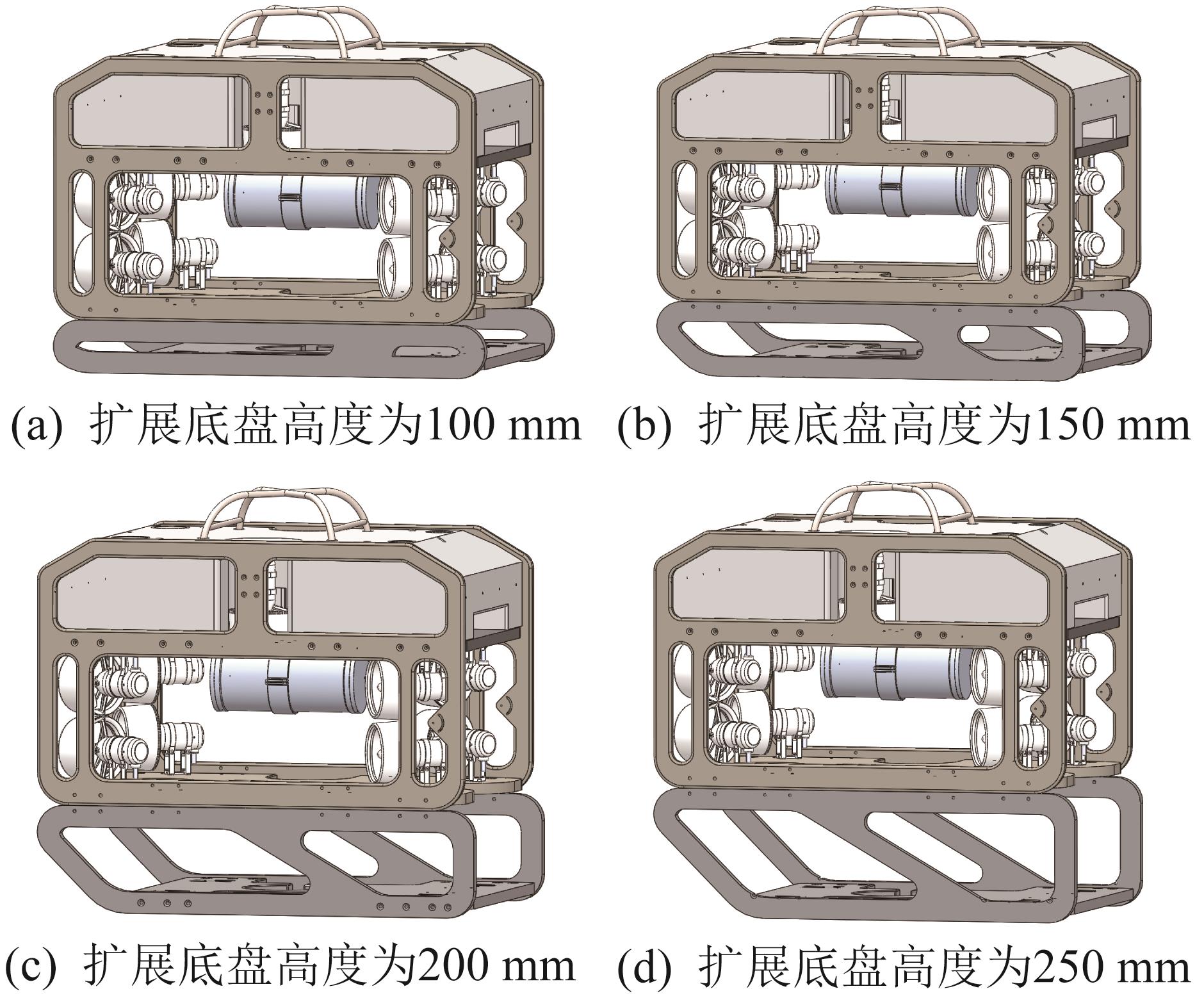
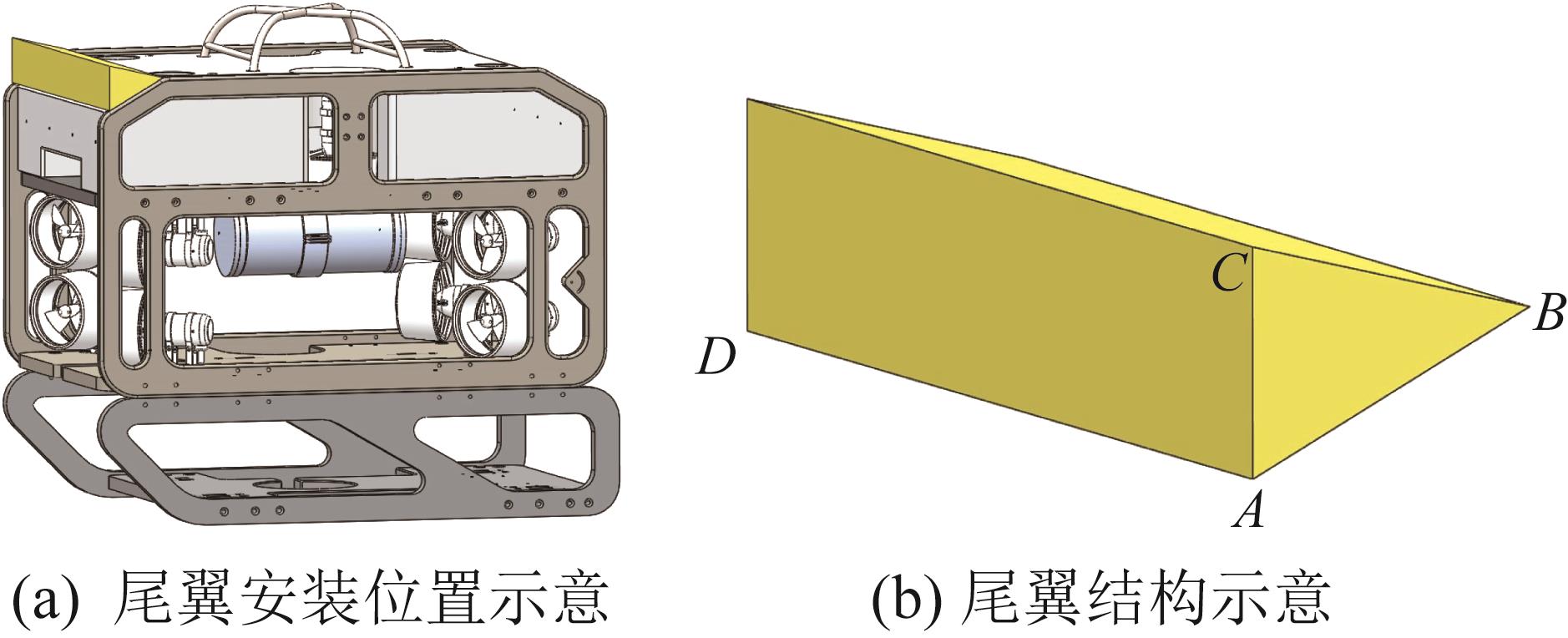
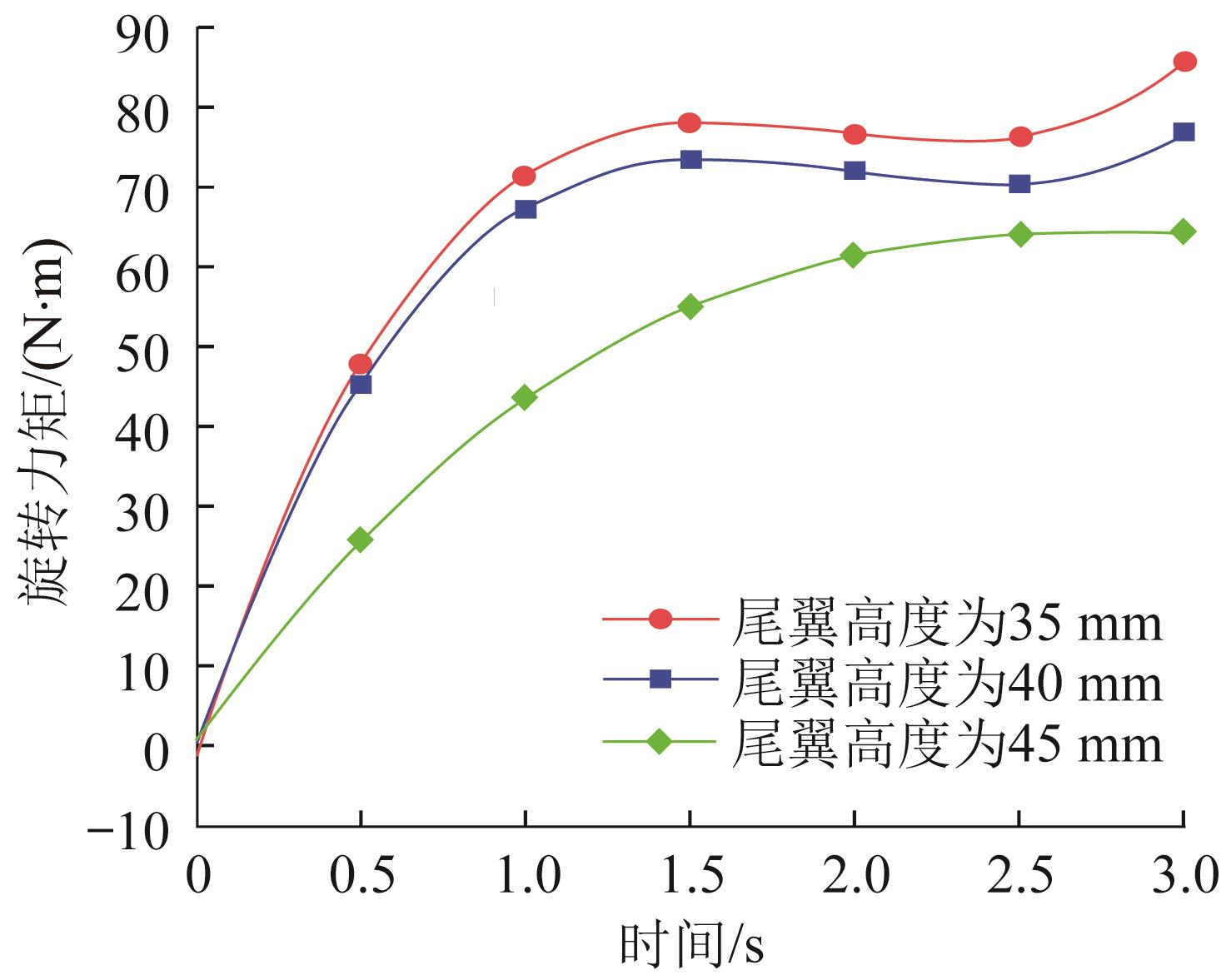
针对无人遥控潜水器(remotely operated vehicle, ROV)在高速航行时因受流场作用而导致纵倾幅值、纵倾角度变化较大的问题,提出通过搭配选择扩展底盘和尾翼结构参数的方法来实现欠驱动型ROV的零纵倾或微纵倾高速运动。基于格子玻尔兹曼方法(lattice Boltzmann method, LBM),通过壁面自适应细化算法,结合ROV的结构参数进行六自由度仿真实验,以模拟ROV的航行运动。对扩展底盘和尾翼高度不同的ROV分别进行数值分析,得到扩展底盘、尾翼的结构参数与ROV纵倾幅值、纵倾角度的关系。通过对航行表现相似的ROV的旋转力矩进行比较,确定了在相同扩展底盘条件下ROV的稳定性与尾翼高度的关系。开展了扩展底盘和尾翼结构优化正交实验,利用遗传算法对不同实验方案下ROV的纵倾数据进行了拟合处理。结合实际需求确定了扩展底盘和尾翼的高度,并通过实际测试验证了ROV纵倾优化设计方案的正确性。结果表明,合理搭配扩展底盘和尾翼的结构可有效减小欠驱动型ROV的纵倾幅值,从而实现ROV在无幅值补偿时的微纵倾航行运动。研究结果可为相关水下装置纵倾运动的改进提供参考。
关键词:
无人遥控潜水器,
格子玻尔兹曼方法,
纵倾,
六自由度仿真,
结构优化
|
|
| [1] |
RAHIMUDDIN, HASAN H, RIVAI H A, et al. Design of omni directional remotely operated vehicle (ROV)[J]. Journal of Physics: Conference Series, 2018, 962: 012017.
|
|
|
| [2] |
PRABHAKAR S, BUCKHAM B. Dynamics modeling and control of a variable length remotely operated vehicle tether[C]//Proceedings of OCEANS 2005 MTS/IEEE. Washington, DC, Sep. 17-23, 2005.
|
|
|
| [3] |
邓鲁克,吕东坡.基于遗传算法对控制水下机器人运动姿态进行PID参数整定[J].制造业自动化,2023,45(1):177-179,206.
DENG L K, LÜ D P. PID parameter tuning of remotely operated vehicle control attitude based on genetic algorithm[J]. Manufacturing Automation, 2023, 45(1): 177-179, 206.
|
|
|
| [4] |
WANG R L, LI Z Q, MA S G, et al. Development of an underwater detection robot[J]. Journal of Physics: Conference Series, 2022, 2203: 012008.
|
|
|
| [5] |
孙洪鸣,郭威,周悦,等.全海深着陆车机构设计及其潜浮运动性能分析[J].机器人,2020,42(2):207-214. doi:10.13973/j.cnki.robot.190375
SUN H M, GUO W, ZHOU Y, et al. Mechanism design and diving-floating motion performance analysis on the full ocean depth landing vehicle[J]. Robot, 2020, 42(2): 207-214.
doi: 10.13973/j.cnki.robot.190375
|
|
|
| [6] |
DONG M J, LI J F, CHOU W S. Depth control of ROV in nuclear power plant based on fuzzy PID and dynamics compensation[J]. Microsystem Technologies, 2020, 26(3): 811-821.
|
|
|
| [7] |
XIE Y, ZHU A F, HUANG Z H. Research on the control performance of depth-fixed motion of underwater vehicle based on fuzzy-PID[J]. Journal of Robotics, 2023, 2023(1): 4168433.
|
|
|
| [8] |
徐玉宁,山钦.ROV加装SKID后对其作业的影响评估[J].石化技术,2022,29(4):192-193,142.
XU Y N, SHAN Q. Evaluation of the impact of ROV loading SKID on its operation[J]. Petrochemical Industry Technology, 2022, 29(4): 192-193, 142.
|
|
|
| [9] |
AGUIRRE-CASTRO O A, INZUNZA-GONZÁLEZ E, GARCÍA-GUERRERO E E, et al. Design and construction of an ROV for underwater exploration[J]. Sensors (Basel), 2019, 19(24): 5387.
|
|
|
| [10] |
HAO H H, SONG Y P, YU J Y .Numerical analysis of water exit for a sphere with constant velocity using the lattice Boltzmann method[J]. Applied Ocean Research,2019, 84: 163-179.
|
|
|
| [11] |
闫银坡,于福杰,陈原.开架式水下机器人水动力系数计算与动力学建模[J].兵工学报,2021,42(9):1972-1986. doi:10.3969/j.issn.1000-1093.2021.09.018
YAN Y P, YU F J, CHEN Y. Hydrodynamic coefficients calculation and dynamic modeling of an open-frame underwater robot[J]. Acta Armamentarii, 2021, 42(9): 1972-1986.
doi: 10.3969/j.issn.1000-1093.2021.09.018
|
|
|
| [12] |
SATRIA D, WIRYADINATA R, ESISWITOYO D P A, et al. Hydrodynamic analysis of remotely operated vehicle (ROV) observation class using CFD[J]. IOP Conference Series: Materials Science and Engineering, 2019, 645: 012014.
|
|
|
| [13] |
许顺源,吴家鸣,马承华,等.带缆水下机器人转首控制及水动力分析[J].中国造船,2022,63(2):126-136.
XU S Y, WU J M, MA C H, et al. Analysis of turning motion and hydrodynamic performance of tethered underwater robot[J]. Shipbuilding of China, 2022, 63(2): 126-136.
|
|
|
| [14] |
王晓鸣,冯森.尾翼对微型ROV运动稳定性的影响[J].机械设计与研究,2019,35(2):30-35. doi:10.13952/j.cnki.jofmdr.a4889
WANG X M, FENG S. Research on kinematic stability of micro remotely operated vehicle with different spoilers[J]. Machine Design and Research, 2019, 35(2): 30-35.
doi: 10.13952/j.cnki.jofmdr.a4889
|
|
|
| [15] |
张志君,陈默,杨贺捷,等.基于XFlow的仿生扑翼飞行器机翼气动特性分析[J].东北大学学报(自然科学版),2021,42(6):821-828. doi:10.12068/j.issn.1005-3026.2021.06.010
ZHANG Z J, CHEN M, YANG H J, et al. Analysis of aerodynamic characteristics of bionic flapping wing aircraft based on XFlow[J]. Journal of Northeastern University (Natural Science), 2021, 42(6): 821-828.
doi: 10.12068/j.issn.1005-3026.2021.06.010
|
|
|
| [16] |
杨永刚,苏汉平.基于XFlow多自由度仿鸟扑翼飞行器气动仿真[J].系统仿真学报,2018,30(6):2162-2167.
YANG Y G, SU H P. Aerodynamic simulation of multi-DOF flapping-wing air vehicle of bird-like based on XFlow software[J]. Journal of System Simulation, 2018, 30(6): 2162-2167.
|
|
|
| [17] |
HAN S L, YU R X, LI Z Y, et al. Effect of turbulence model on simulation of vehicle aerodynamic characteristics based on XFlow[J]. Applied Mechanics and Materials, 2013, 457-458: 1571-1574.
|
|
|
| [18] |
LIU Y H, FANG P P, BIAN D D, et al. Fuzzy comprehensive evaluation for the motion performance of autonomous underwater vehicle[J]. Ocean Engineering, 2014, 88: 568-577.
|
|
|
| [19] |
许伦辉,吴攀,黄宝山.基于XFlow软件的双体游艇阻力准确性分析[J].船舶标准化工程师,2019,52(4):50-56. doi:10.14141/j.31-1981.2019.04.011
XU L H, WU P, HUANG B S. Accuracy analysis in the resistance of catamaran based on XFlow software[J]. Ship Standardization Engineer, 2019, 52(4): 50-56.
doi: 10.14141/j.31-1981.2019.04.011
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|