| Robotic and Mechanism Design |
|

|
|
|
| Design and analysis of wind-generator set blade inspection robot |
Yan ZHANG1( ),Xiaolin HU2,Kaiming WANG2,Hua HUANG2() ),Xiaolin HU2,Kaiming WANG2,Hua HUANG2() |
1.Gansu Province Special Equipment Inspection and Testing Institute, Lanzhou 730050, China
2.School of Mechanical and Electrical Engineering, Lanzhou University of Technology, Lanzhou 730050, China |
|
|
|
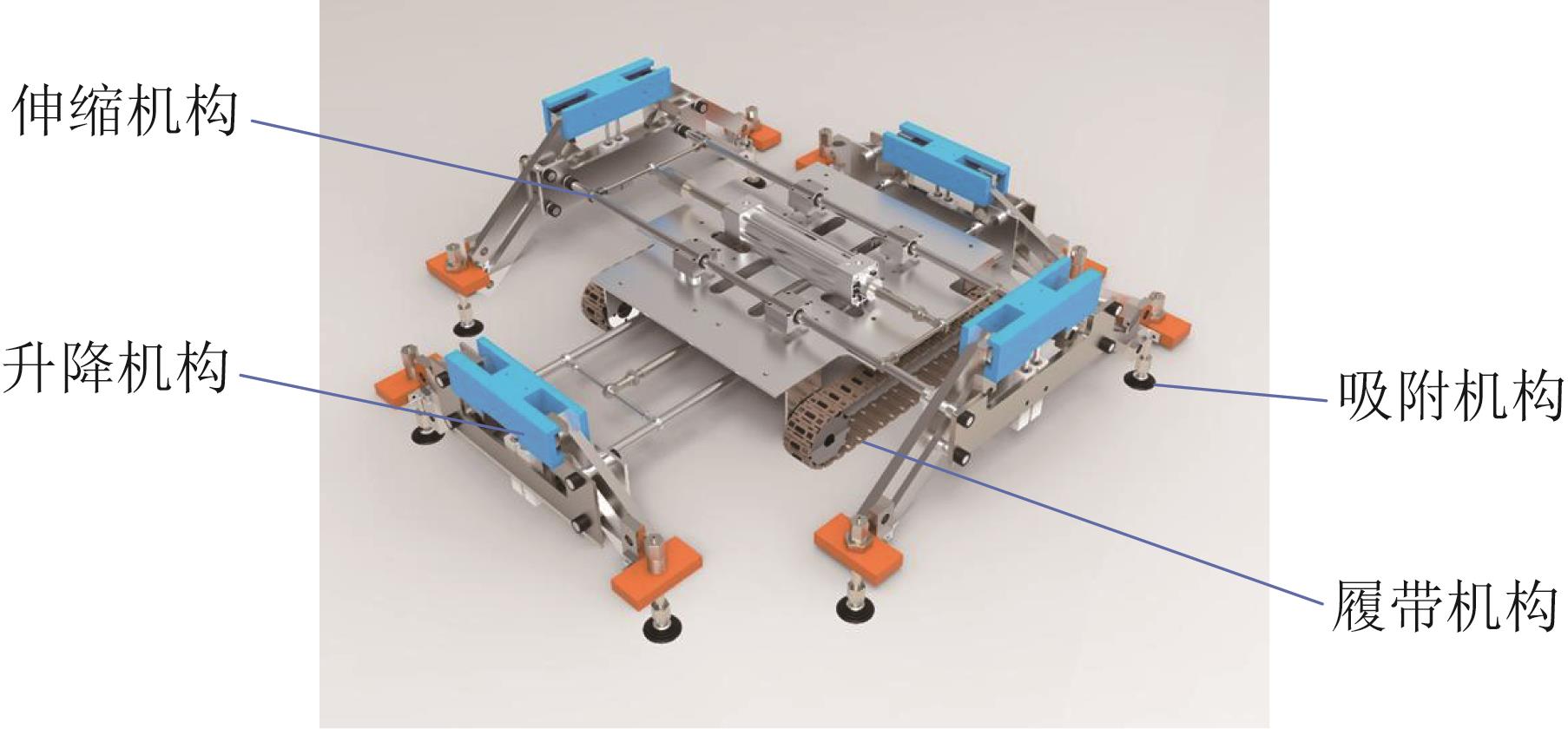
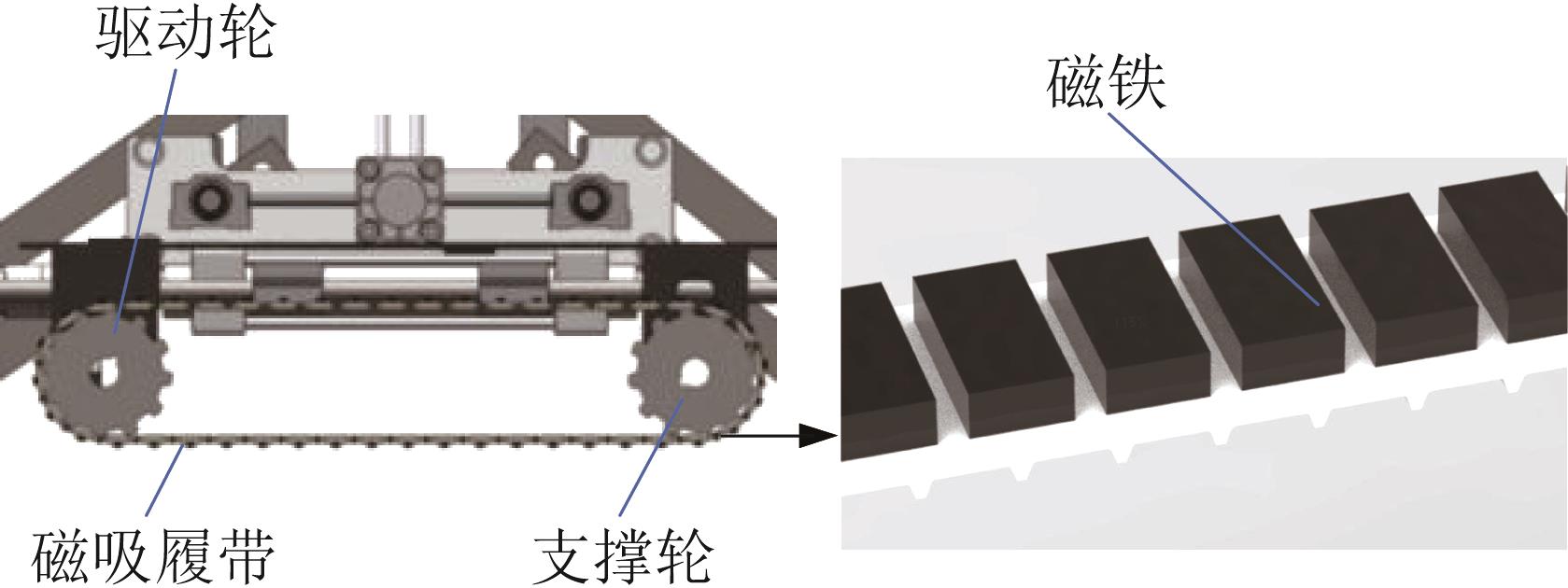
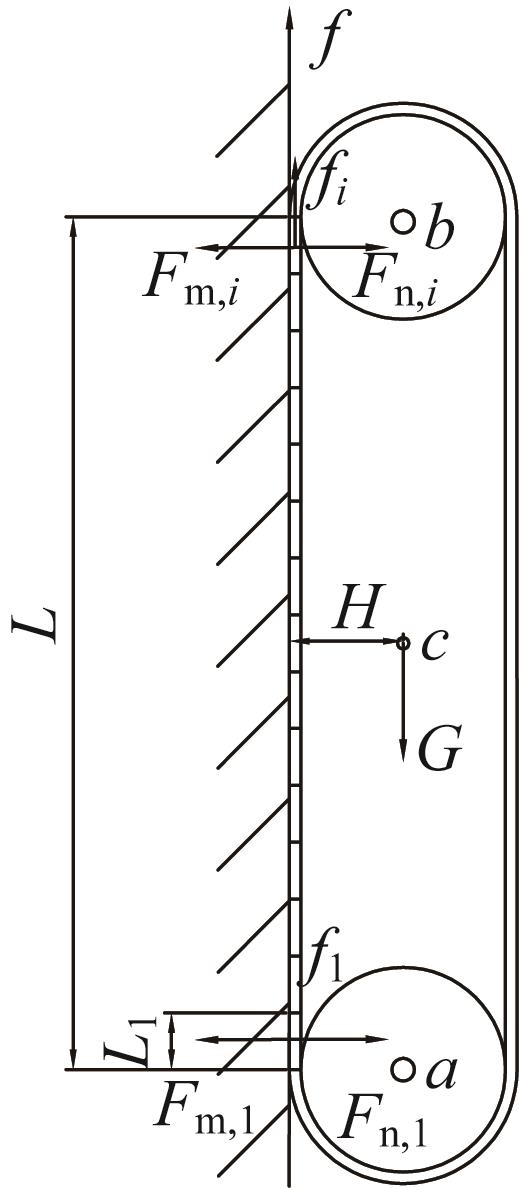
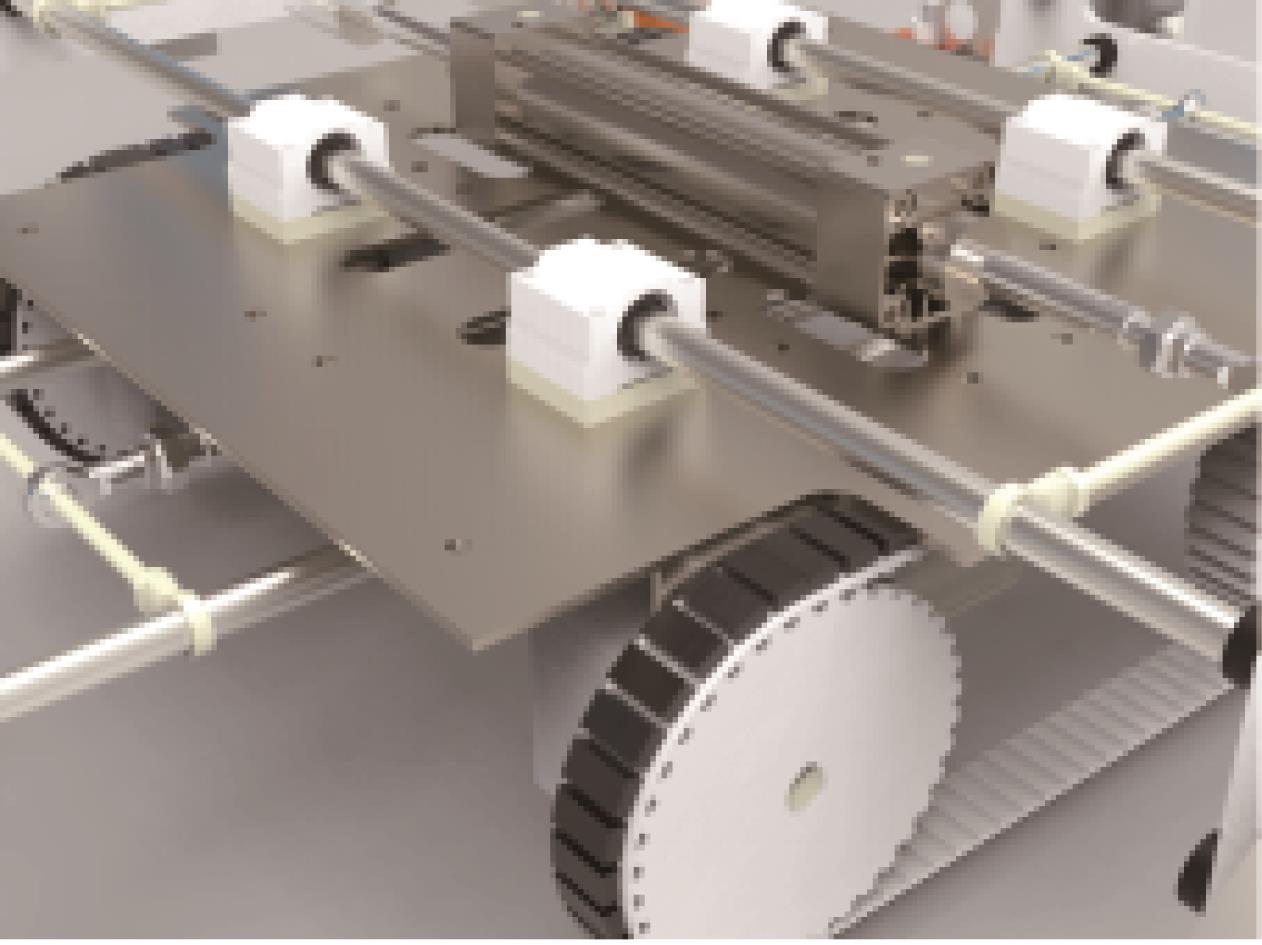
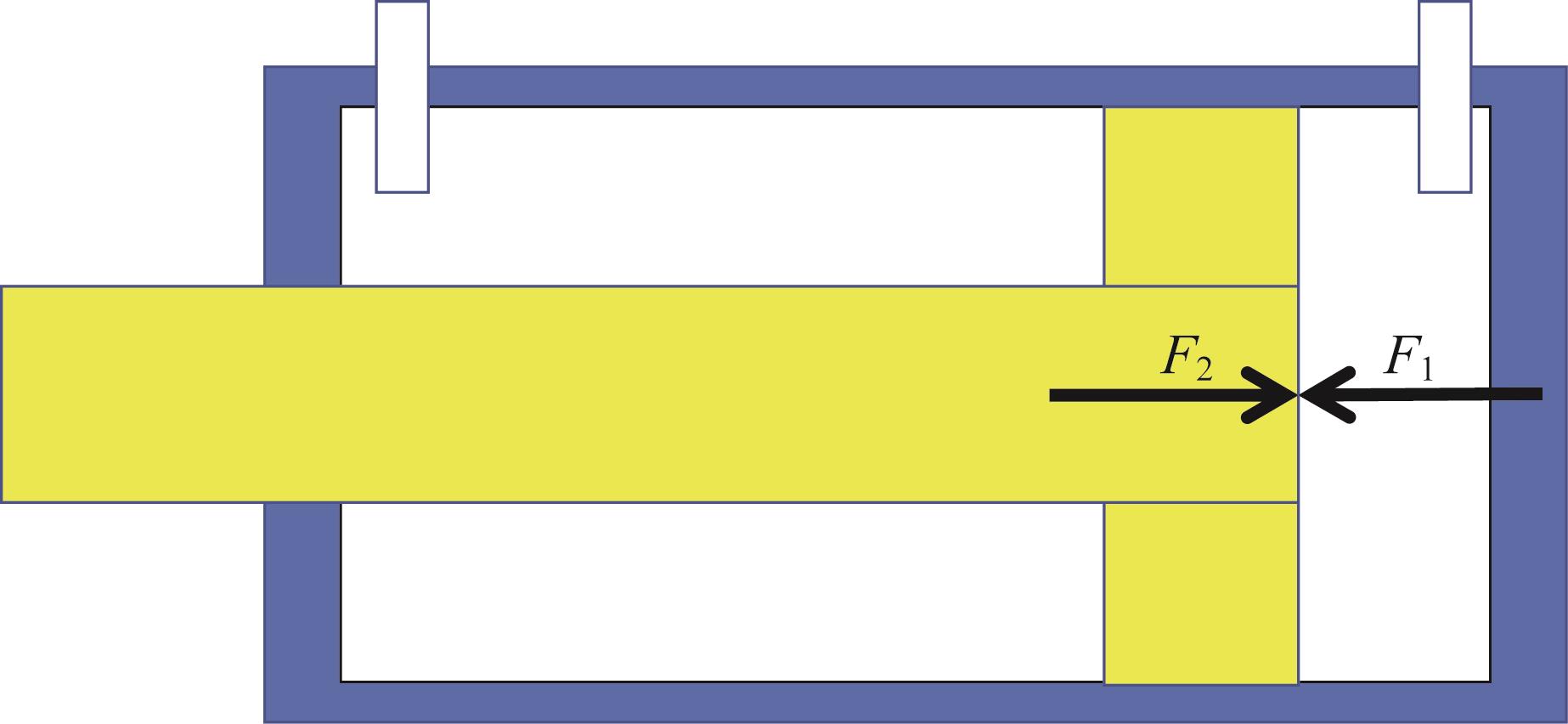
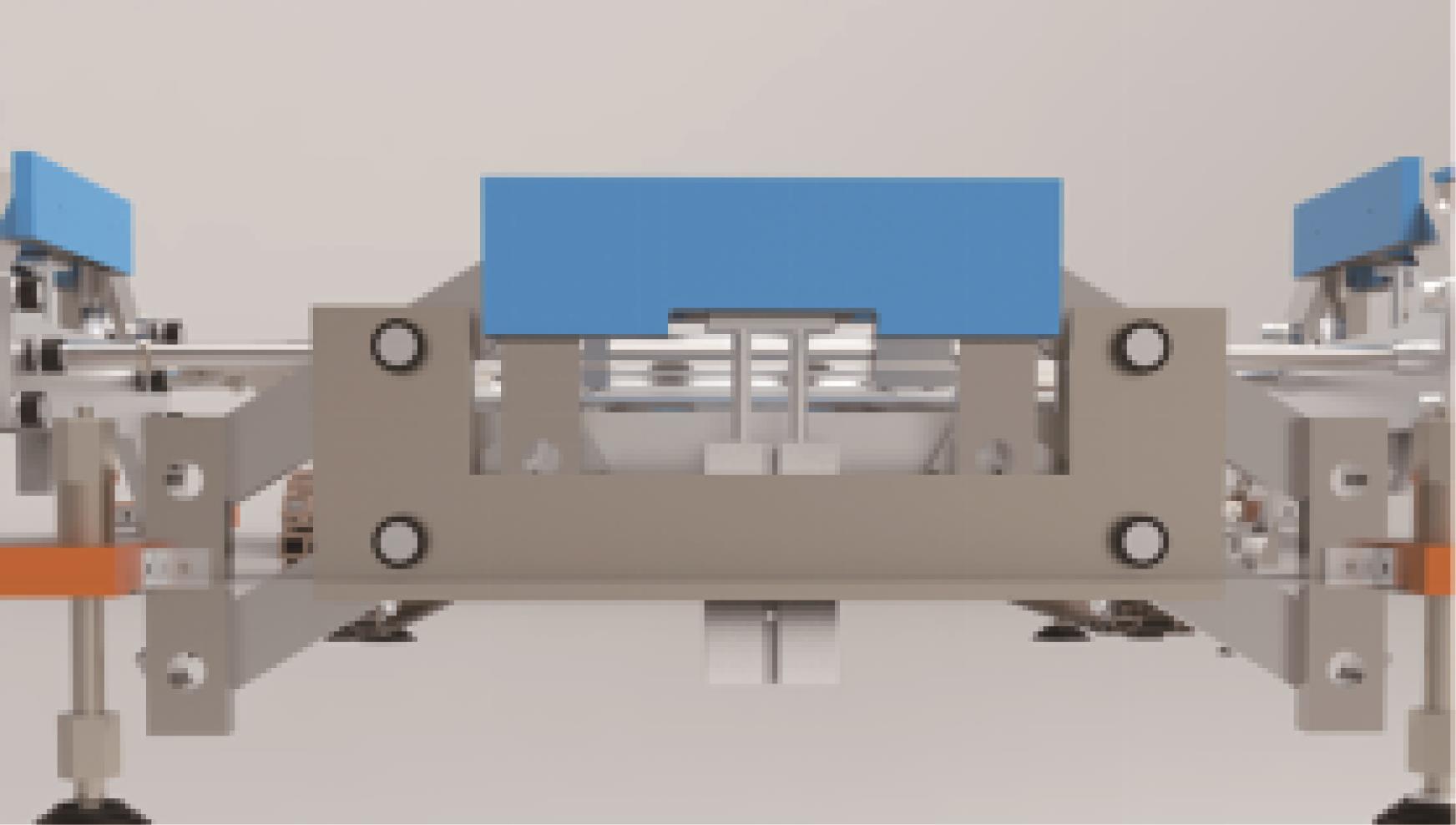
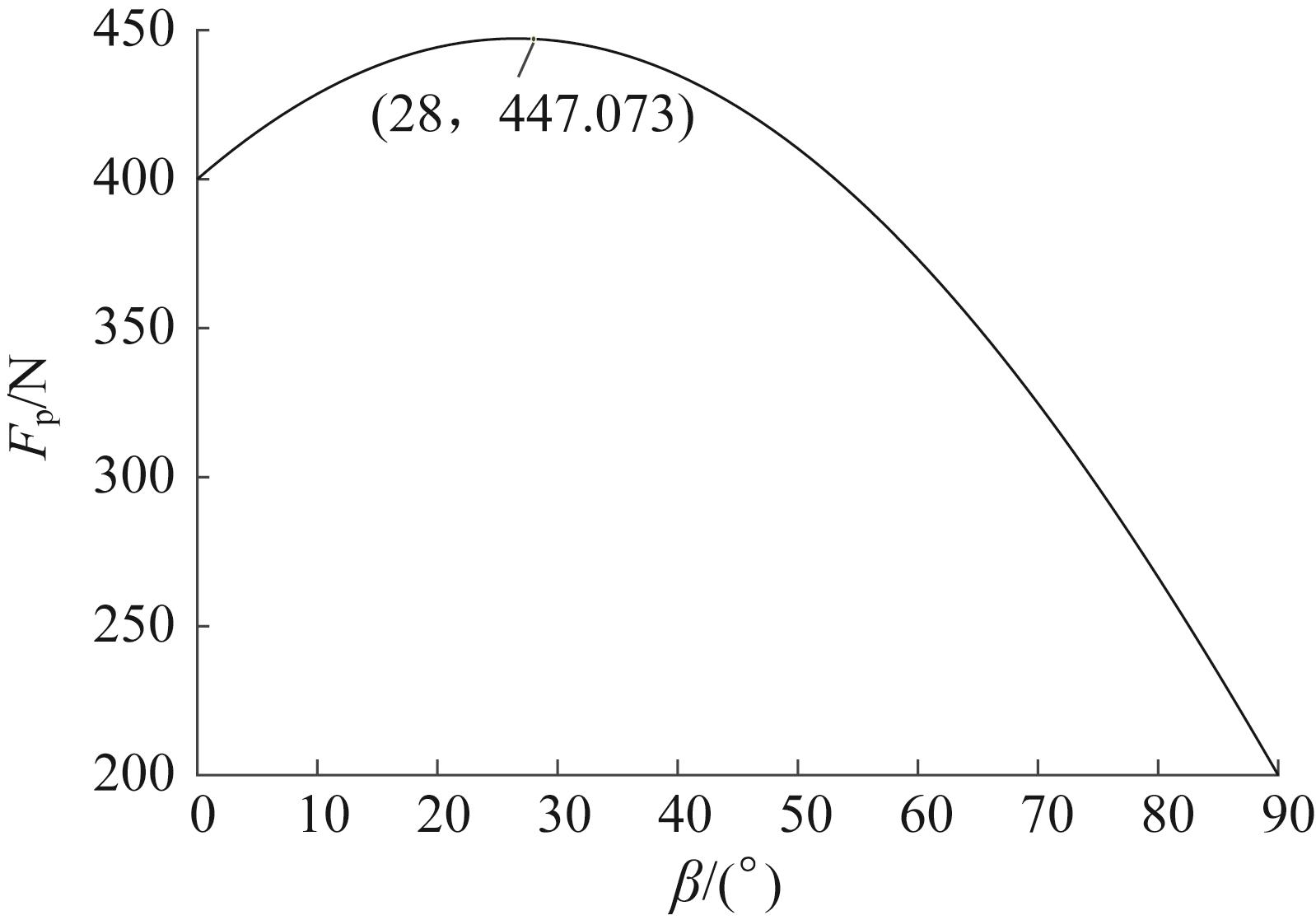
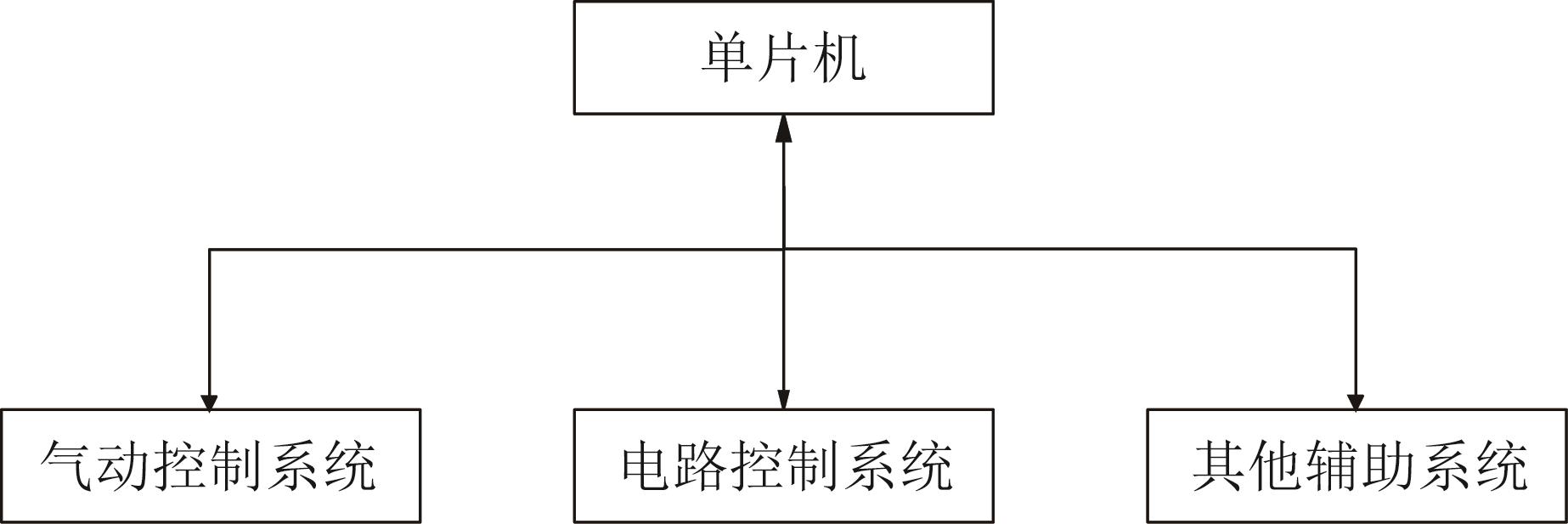
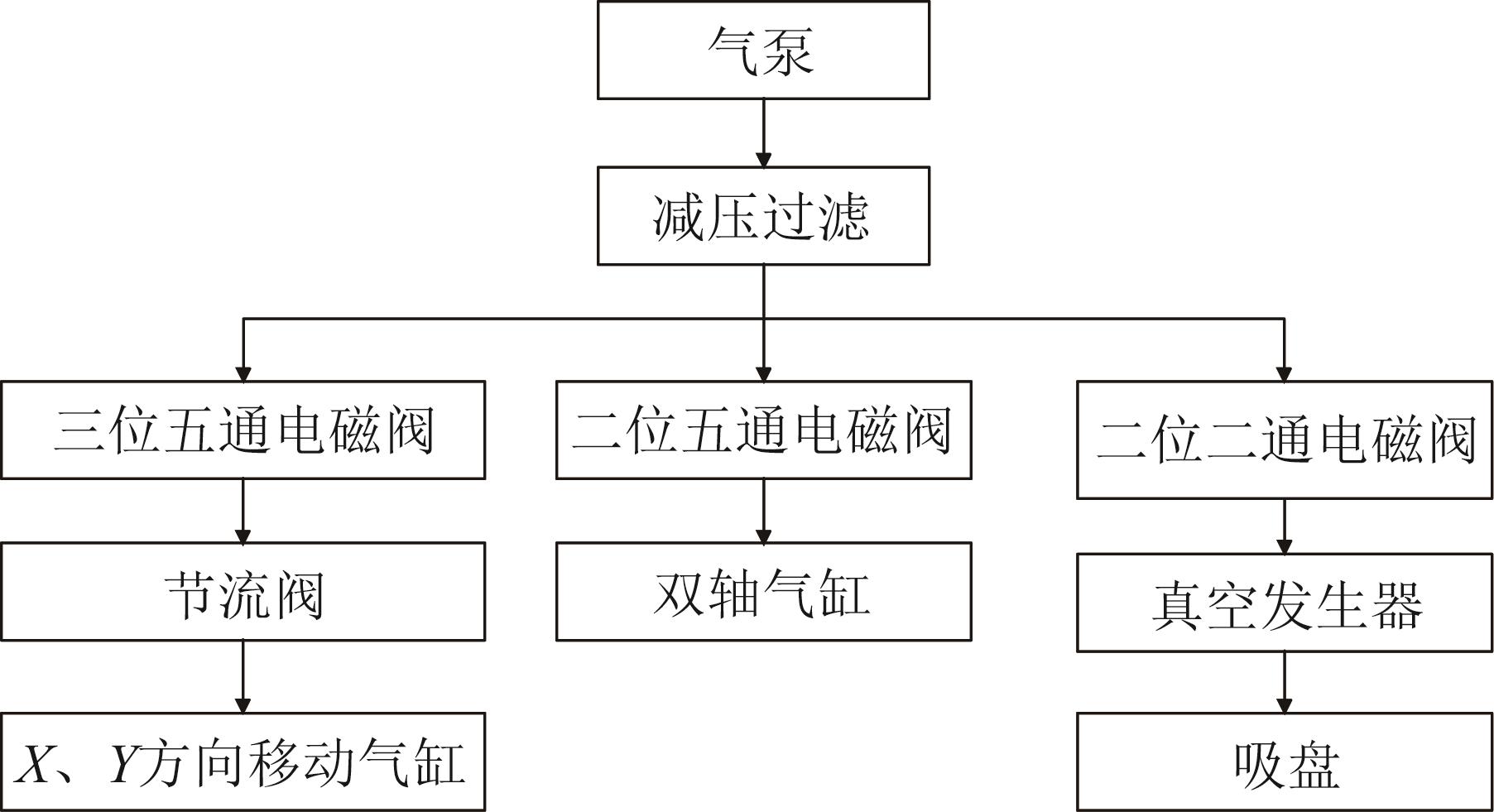
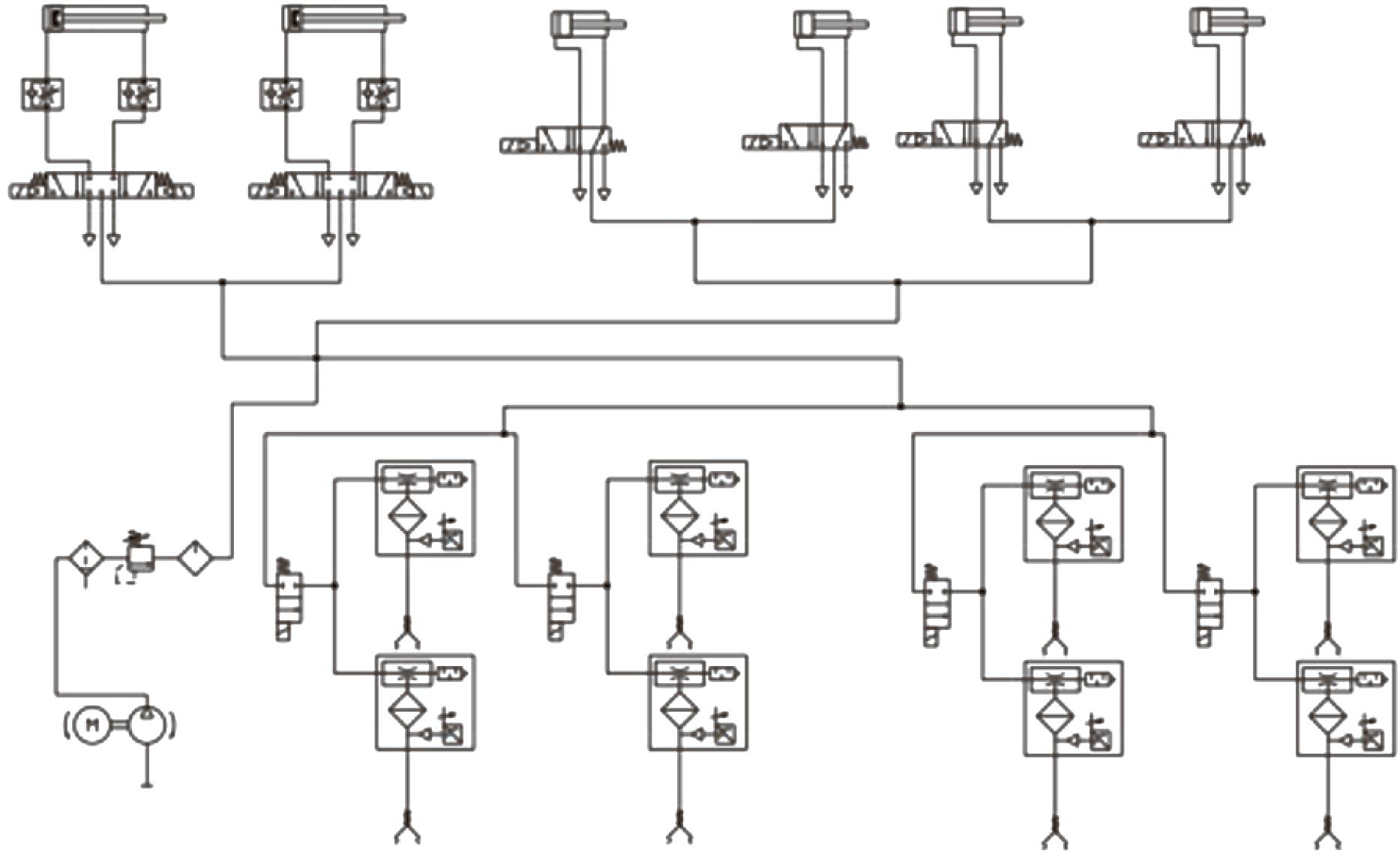
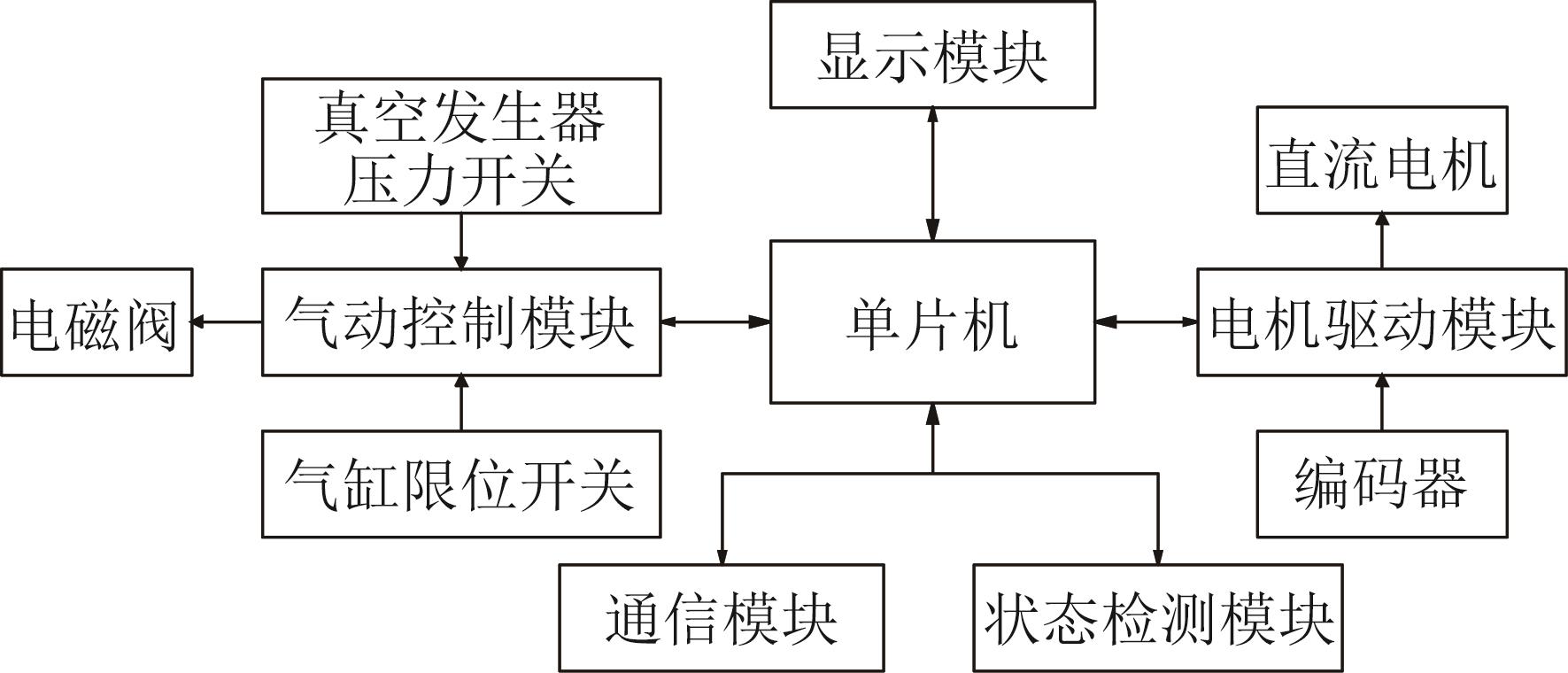
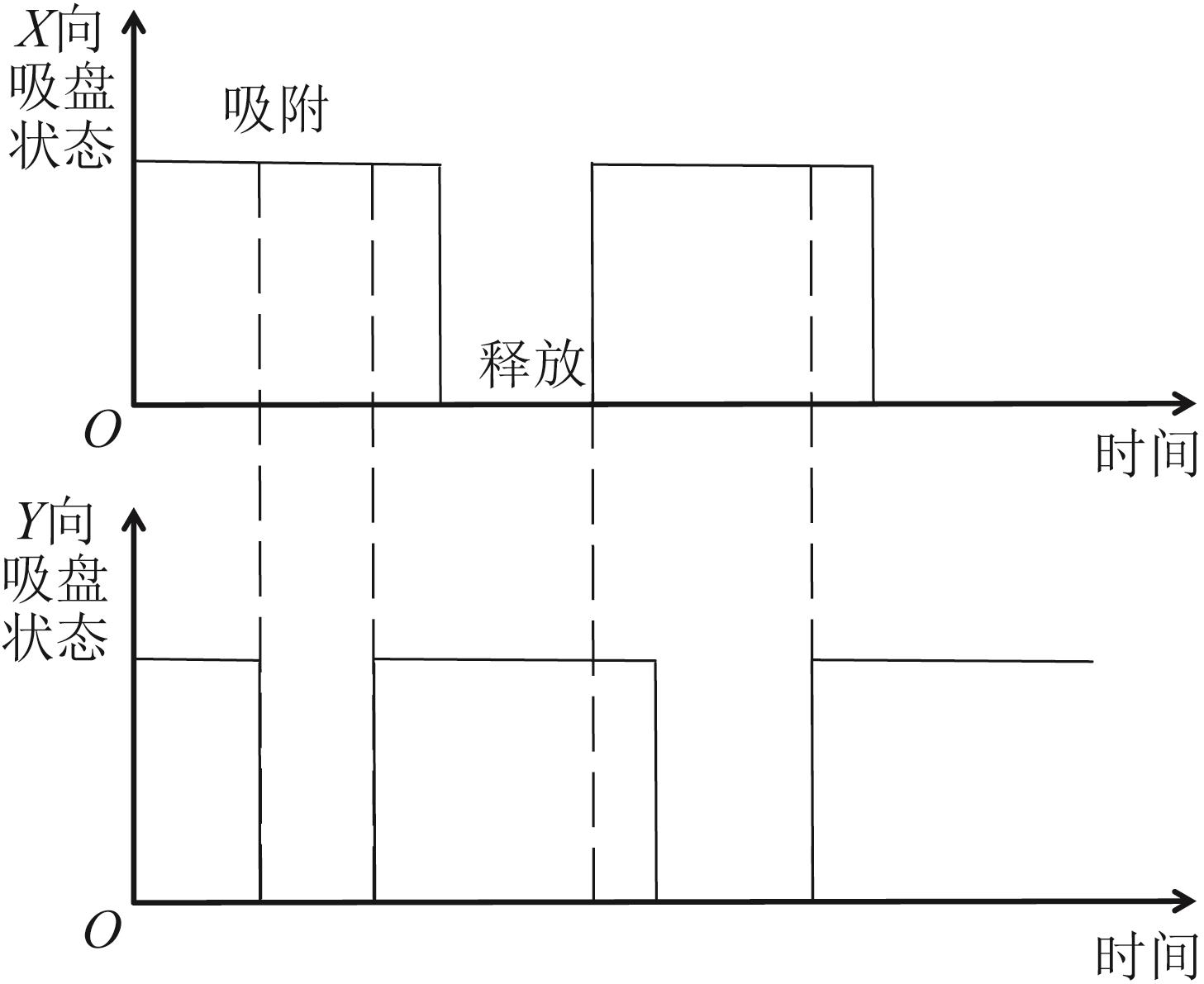
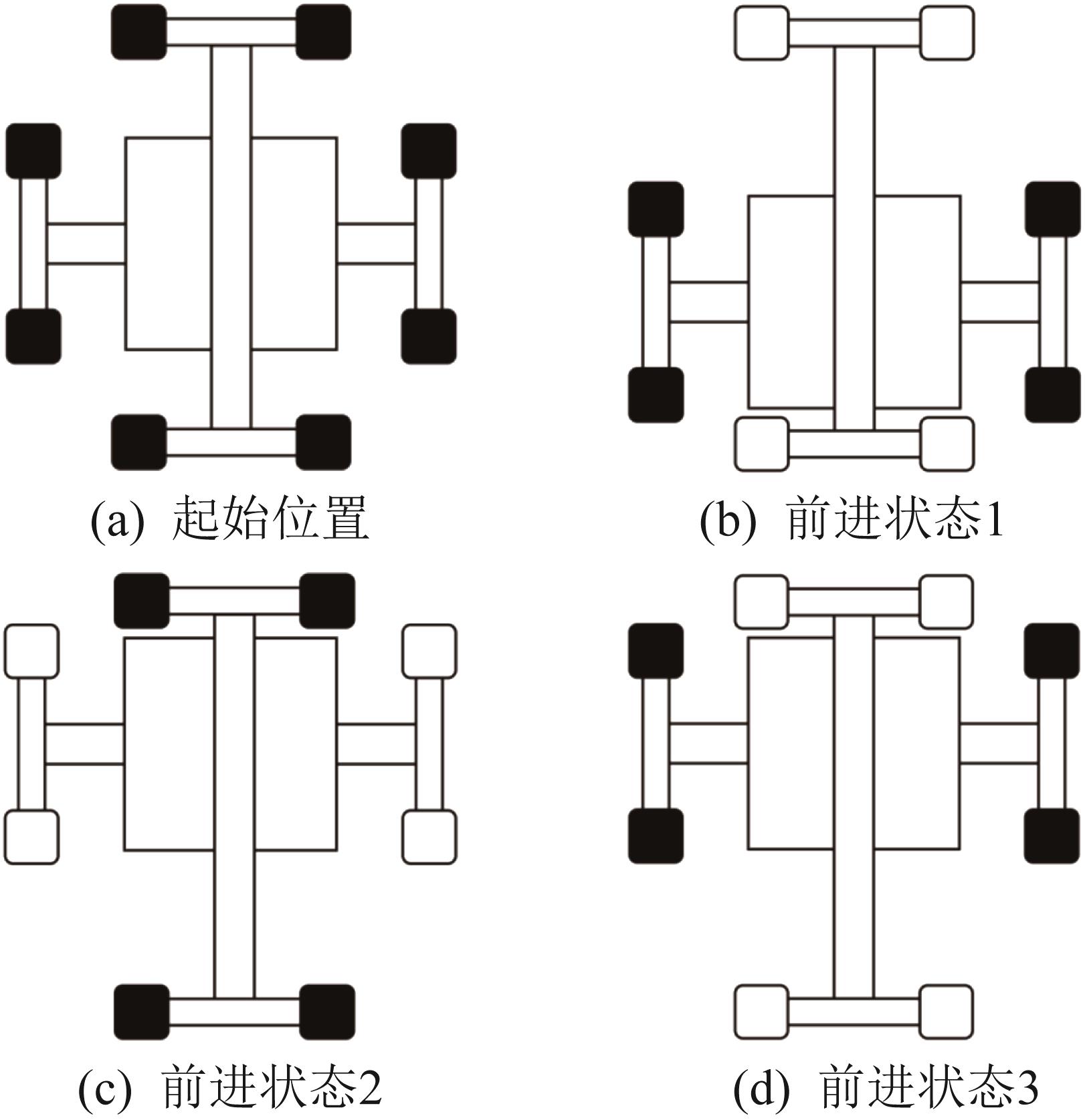
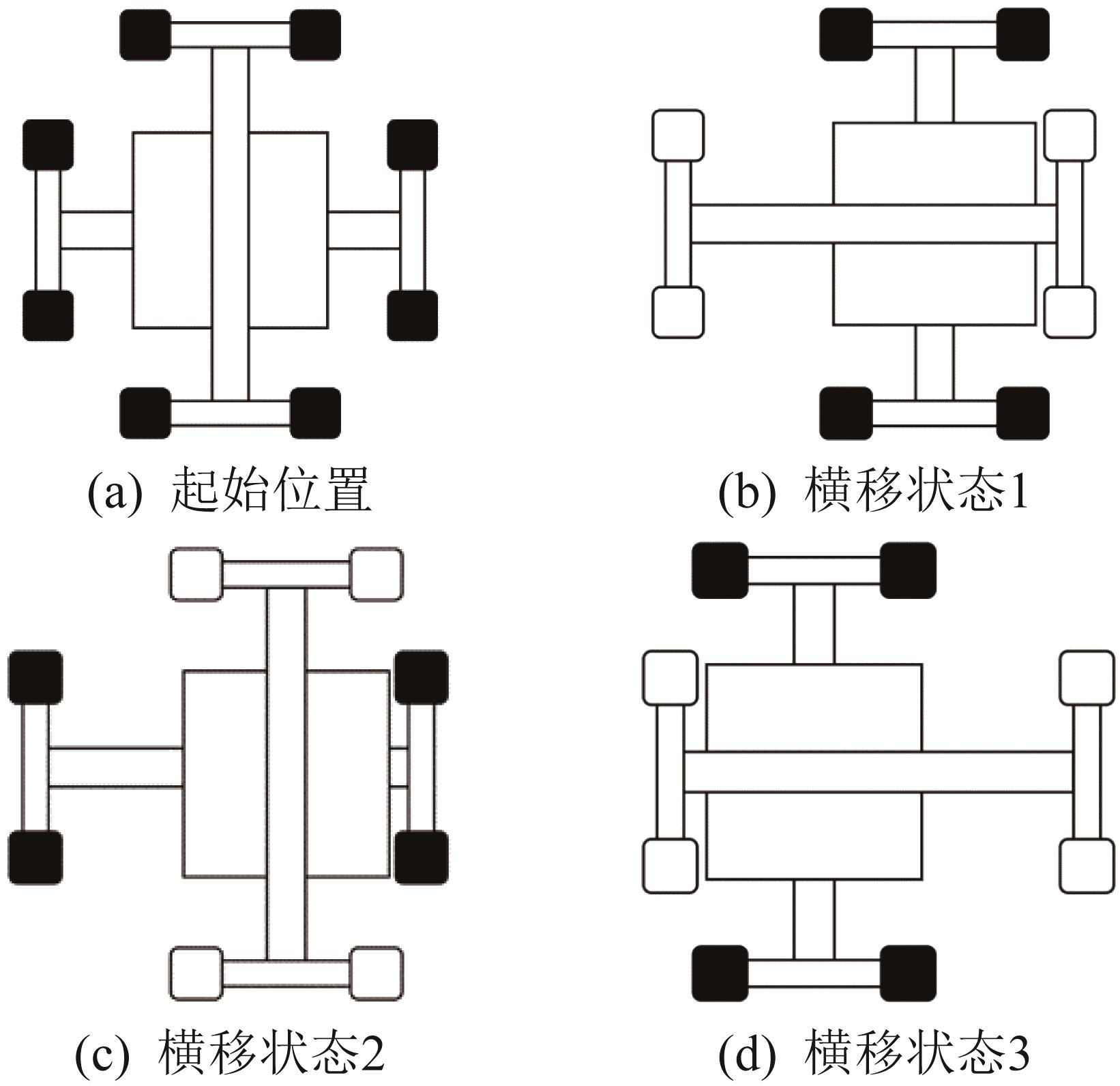
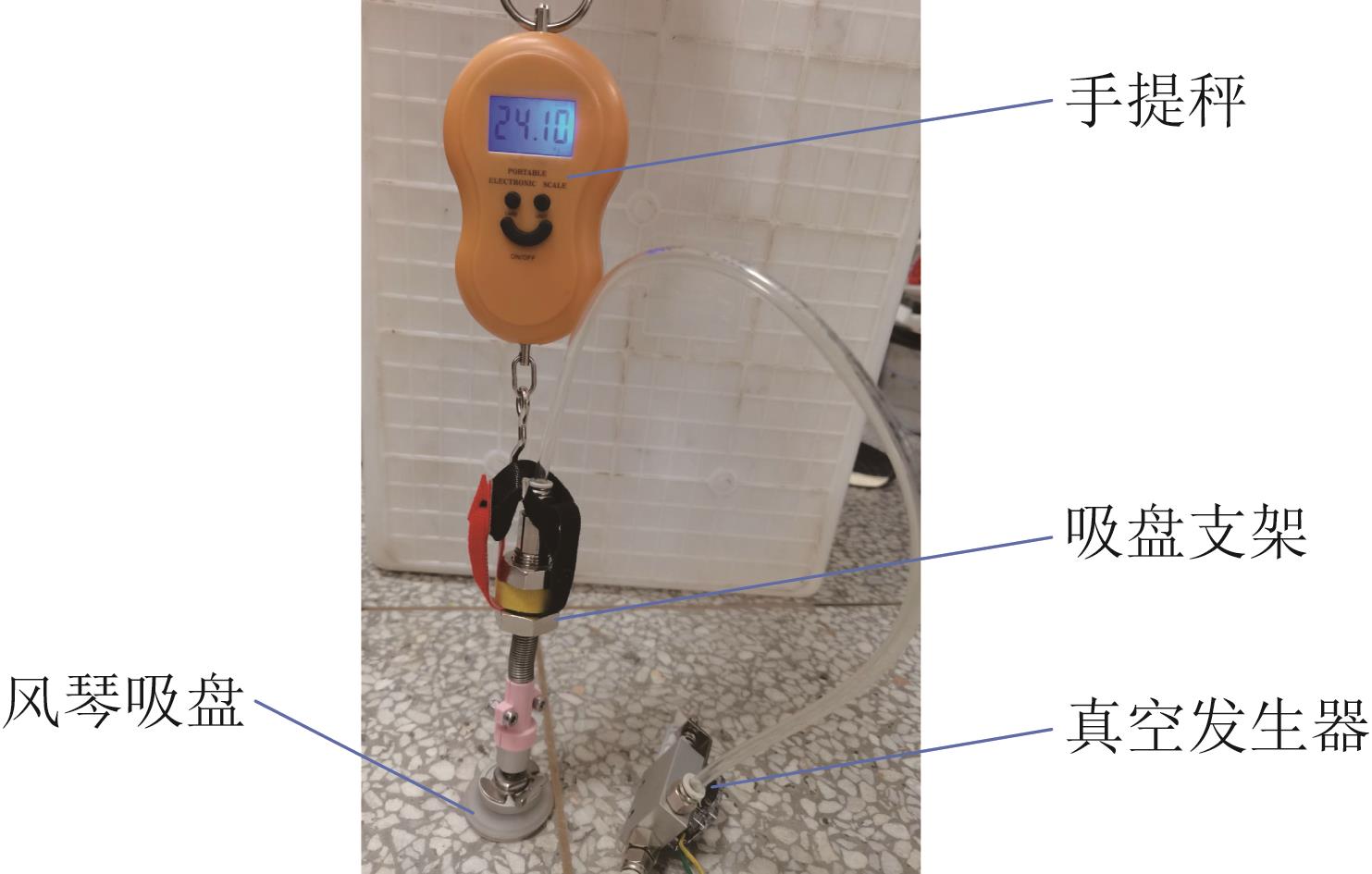
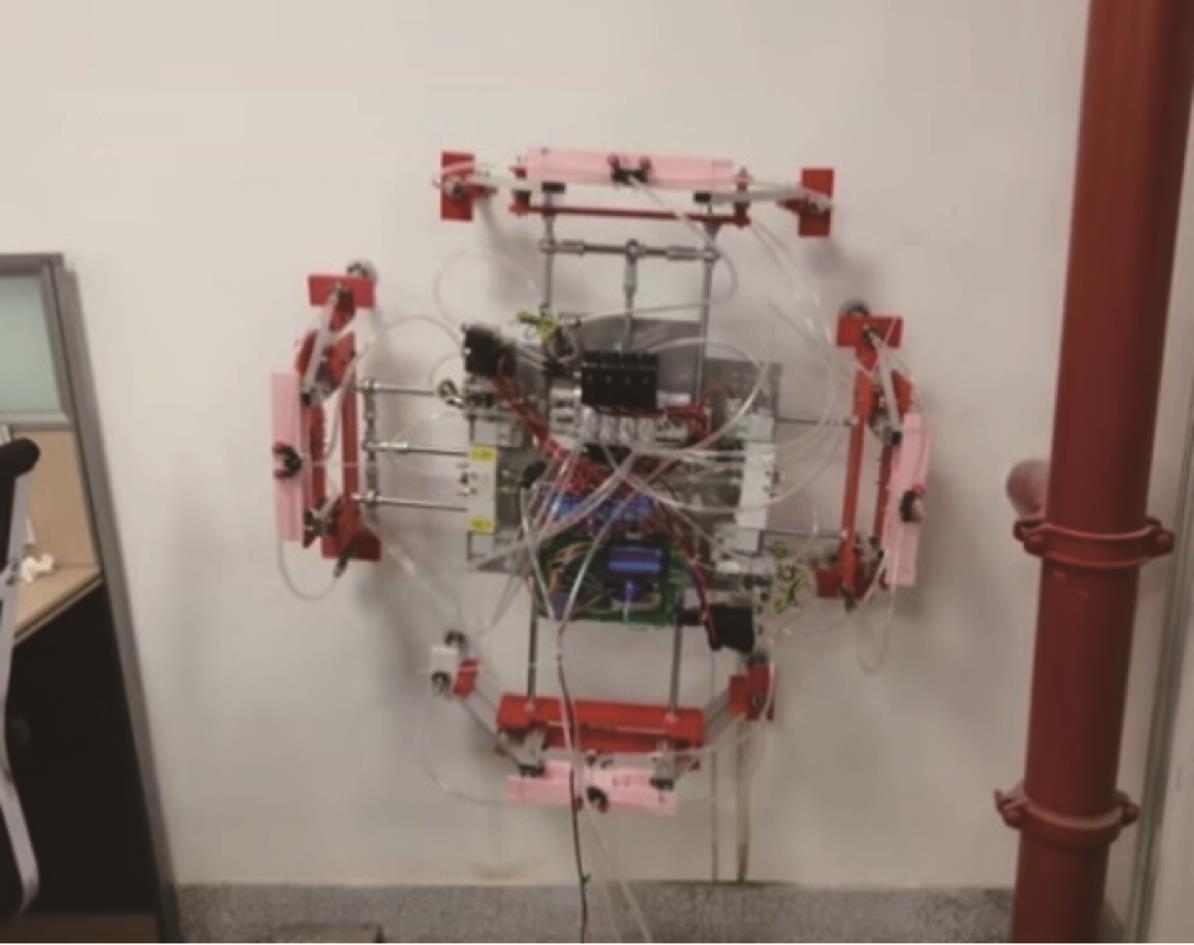
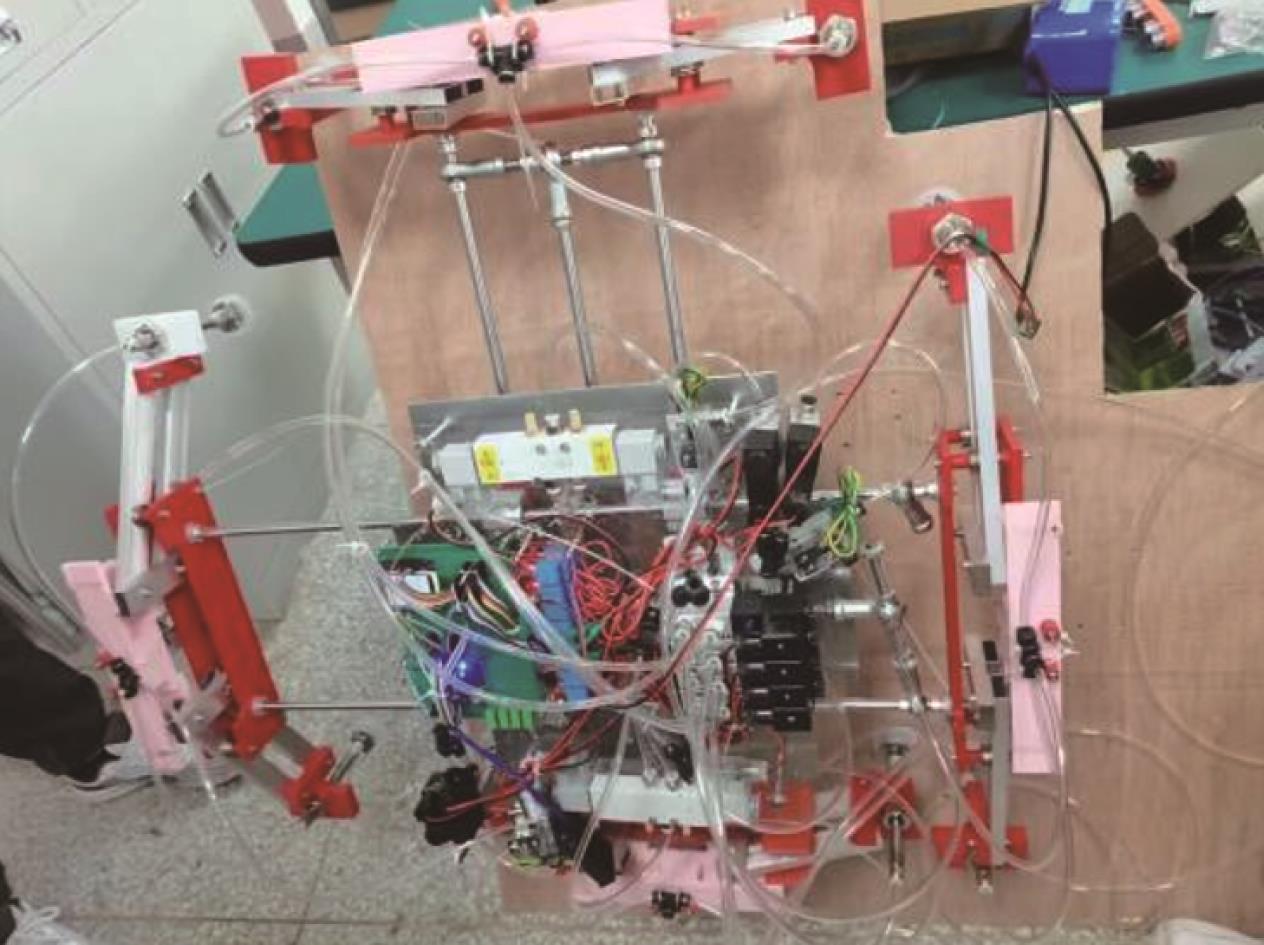
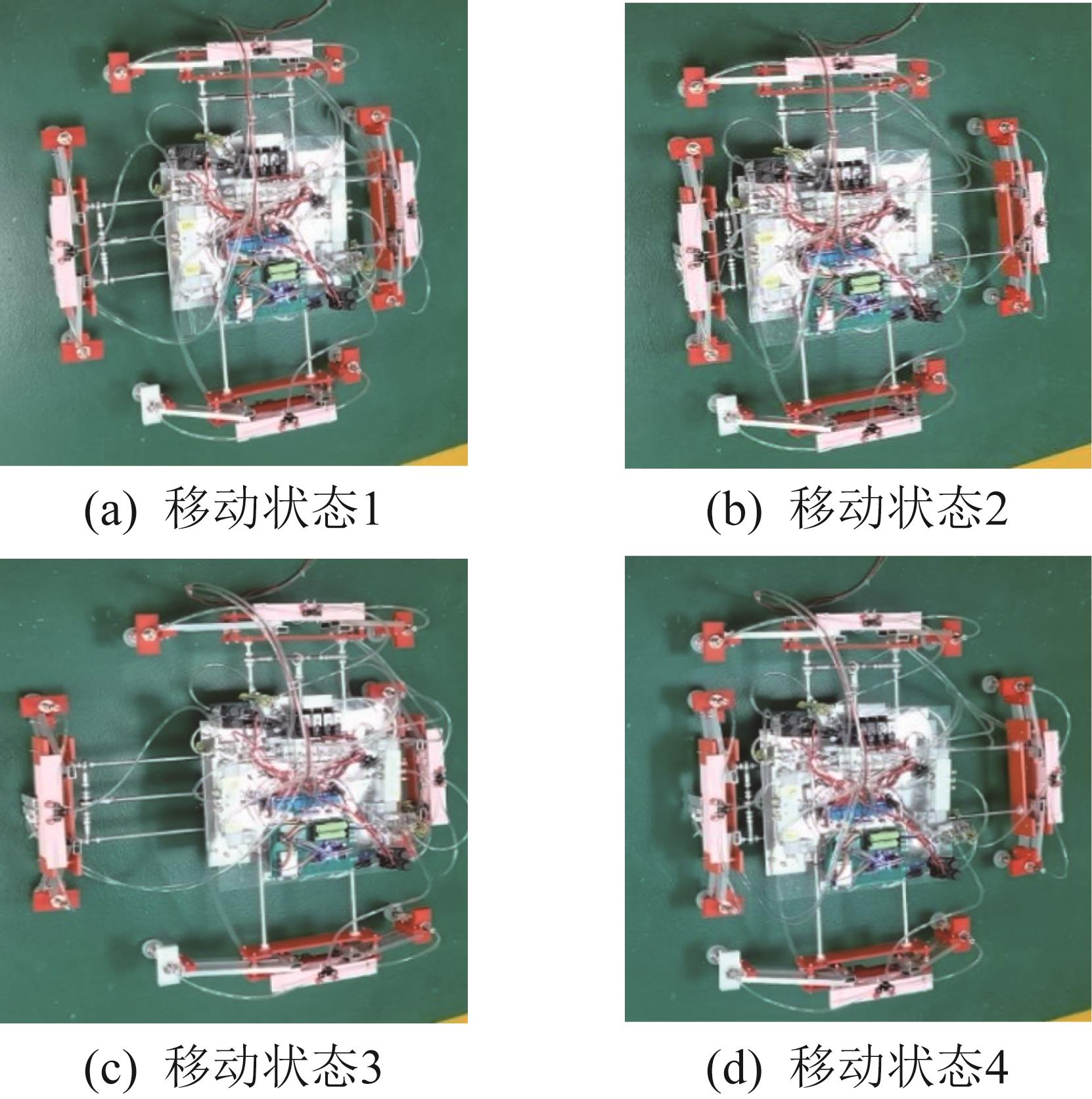
Abstract Aiming at the difficulty of wind-generator set blade inspection and the poor effect of traditional robot inspection, a wind-generator set blade inspection robot based on legged-and-tracked movement and hybrid adsorption was designed. Firstly, the mechanical characteristics of the robot moving on the blade surface were modeled, the required adsorption forces were calculated under the conditions of slip-free and overturning-free motion, and the equipment components were selected according to the calculation results. Secondly, according to the robot's structural characteristics, the corresponding control system was designed, and its moving gaits on the blade surface were planned and analyzed. Finally, the experiments were conducted to verify the effectiveness of the robot design scheme. The experimental results demonstrated that the robot had flexible moving ability and good adsorption performance, which could meet the actual demand of blade inspection. The research results not only promote the practical application of the robot in wind-generator set blade inspection, but also provide a reference for the progress and popularization of automatic inspection technology in related fields.
|
|
Received: 22 August 2024
Published: 06 May 2025
|
|
|
|
Corresponding Authors:
Hua HUANG
E-mail: 79144469@qq.com;hh318872@126.com
|
风力发电机叶片检测机器人的设计与分析
针对风力发电机叶片检测难度大及传统机器人检测效果不佳的问题,设计了一种基于足履式移动和复合式吸附的风机叶片检测机器人。首先,对机器人在叶片表面移动时的力学特性进行建模,计算其无滑移和倾覆时所需的吸附力,并根据计算结果进行设备元件的选型;其次,根据机器人结构特性,设计相应的控制系统,并对其在叶片表面的移动步态进行规划与分析;最后,通过实验验证了机器人设计方案的有效性。实验结果表明,该机器人具备灵活的移动能力和良好的吸附性能,能够满足风机叶片检测的实际需求。研究结果促进了机器人在风机叶片检测中的实际应用,还为相关领域自动化检查技术的进步和推广提供了参考。
关键词:
足履式移动,
复合吸附,
叶片检测机器人,
气压驱动
|
|
| [1] |
陈先龙, 王秀丽, 陈洁, 等. 考虑分布式可再生能源交易的风电商与电动汽车充电站协同优化调度[J]. 电网技术, 2023, 47(11): 4598-4610.
CHEN X L, WANG X L, CHEN J, et al. Optimal collaborative scheduling of wind power operators and electric vehicle charging stations considering distributed renewable energy trading[J]. Power System Technology, 2023, 47(11): 4598-4610.
|
|
|
| [2] |
王道累, 肖佳威, 刘易腾, 等. 风电机组叶片损伤检测技术研究与进展[J]. 中国电机工程学报, 2023, 43(12): 4614-4631.
WANG D L, XIAO J W, LIU Y T, et al. Research and development of wind turbine blade damage detection technology[J]. Proceedings of the CSEE, 2023, 43(12): 4614-4631.
|
|
|
| [3] |
张小俊, 吴亚淇, 刘昊学, 等. 轮足式磁吸附越障爬壁机器人设计与分析[J]. 机械工程学报, 2024, 60(1): 248-261. doi:10.3901/jme.2024.01.248
ZHANG X J, WU Y Q, LIU H X, et al. Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability[J]. Journal of Mechanical Engineering, 2024, 60(1): 248-261.
doi: 10.3901/jme.2024.01.248
|
|
|
| [4] |
杨培, 张明路, 孙凌宇. 爬壁机器人磁黏附模块设计分析与参数优化[J]. 工程设计学报, 2024, 31(5): 592-602.
YANG P, ZHANG M L, SUN L Y. Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot[J]. Chinese Journal of Engineering Design, 2024, 31(5): 592-602.
|
|
|
| [5] |
郑勇峰, 刘昊学. 自适应轮足式爬壁机器人设计与分析[J]. 机械设计, 2021, 38(9): 105-112.
ZHENG Y F, LIU H X. Design and analysis of the self-adaptive wheel-footed wall-climbing robot[J]. Journal of Machine Design, 2021, 38(9): 105-112.
|
|
|
| [6] |
霍平, 徐阳阳, 于江涛, 等. 一种新型足式爬壁机器人设计[J]. 实验室研究与探索, 2021, 40(10): 77-81.
HUO P, XU Y Y, YU J T, et al. Design of a new foot wall climbing robot[J]. Research and Exploration in Laboratory, 2021, 40(10): 77-81.
|
|
|
| [7] |
徐阳阳, 于江涛, 李占贤, 等. 足式爬壁机器人的控制系统和实验研究[J]. 传感器与微系统, 2023, 42(9): 14-17.
XU Y Y, YU J T, LI Z X, et al. Control system and experimental research of foot-type wall-climbing robot[J]. Transducer and Microsystem Technologies, 2023, 42(9): 14-17.
|
|
|
| [8] |
LEE D G, OH S, SON H I. Wire-driven parallel robotic system and its control for maintenance of offshore wind turbines[C]//2016 IEEE International Conference on Robotics and Automation. New York: IEEE, 2016: 902-908.
|
|
|
| [9] |
SAHBEL A, ABBAS A, SATTAR T. System design and implementation of wall climbing robot for wind turbine blade inspection[C]//2019 International Conference on Innovative Trends in Computer Engineering. New York: IEEE, 2019: 242-247.
|
|
|
| [10] |
李响, 刘书海, 肖华平, 等. 风电叶片检测机器人设计与运动仿真研究[J]. 现代制造工程, 2023(4): 51-58.
LI X, LIU S H, XIAO H P, et al. Design and motion simulation of a wind turbine blade detection robot[J]. Modern Manufacturing Engineering, 2023(4): 51-58.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|