Research on environmental sanitation robot formation based on leader-follower and artificial potential field
Yuming XIE1(),Hanfeng YIN2(),Huihui XIAO1
1.Hunan Engineering Research Center of Control Technology and Equipment of Special Robot in Complex Environment, Xiangtan 411104, China 2.College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China
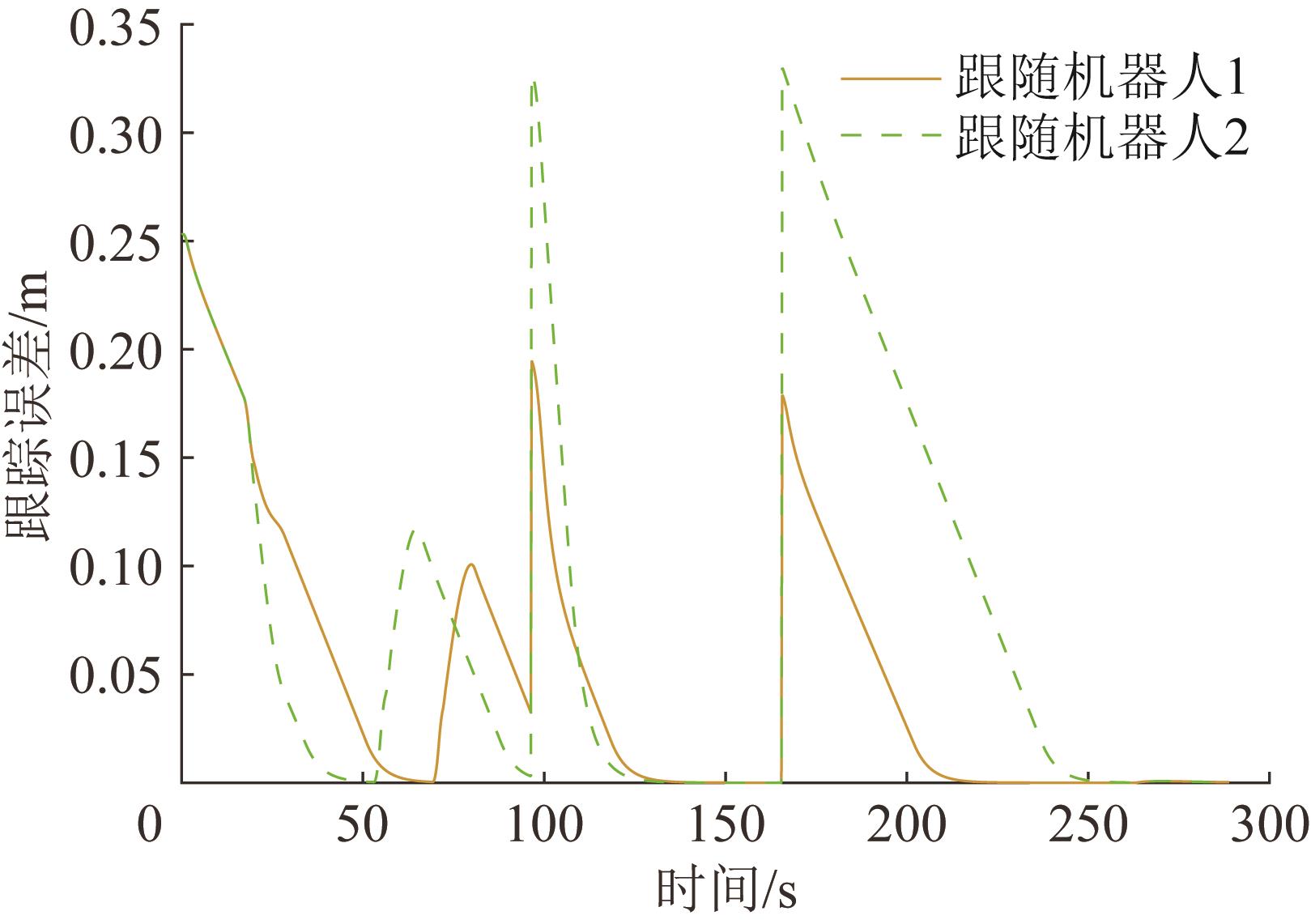
Aiming at the problem of poor formation stability of environmental sanitation robots during cluster operations, an innovative formation control method combining the leader-follower strategy and artificial potential field algorithm is proposed. Firstly, according to the structural characteristics of the environmental sanitation robot, its kinematics model was constructed based on the leader-follower strategy. Then, in view of the complex operation environment of environmental sanitation robots, the artificial potential field algorithm was employed for formation obstacle avoidance, and a novel formation transformation strategy was proposed to enable robots to smoothly pass through the working scenarios such as back streets and alleys, so as to realize the cooperative operation of multi-robots. Finally, the simulation experiments were conducted by MATLAB software and the experimental test was carried out in the actual operation scenario. The results showed that the proposed method could effectively facilitate the formation of environmental sanitation robots to avoid obstacles and pass through narrow passage in complex operation scenarios, while achieving stable formation maintenance and flexible transformation. The tracking error of the following robot remained below 0.1 m when the formation was stable, and the experimental results verified the effectiveness of the formation control method. The research results provide reference for the formation control of environmental sanitation robots in different operation scenarios.
Yuming XIE,Hanfeng YIN,Huihui XIAO. Research on environmental sanitation robot formation based on leader-follower and artificial potential field. Chinese Journal of Engineering Design, 2025, 32(1): 42-50.
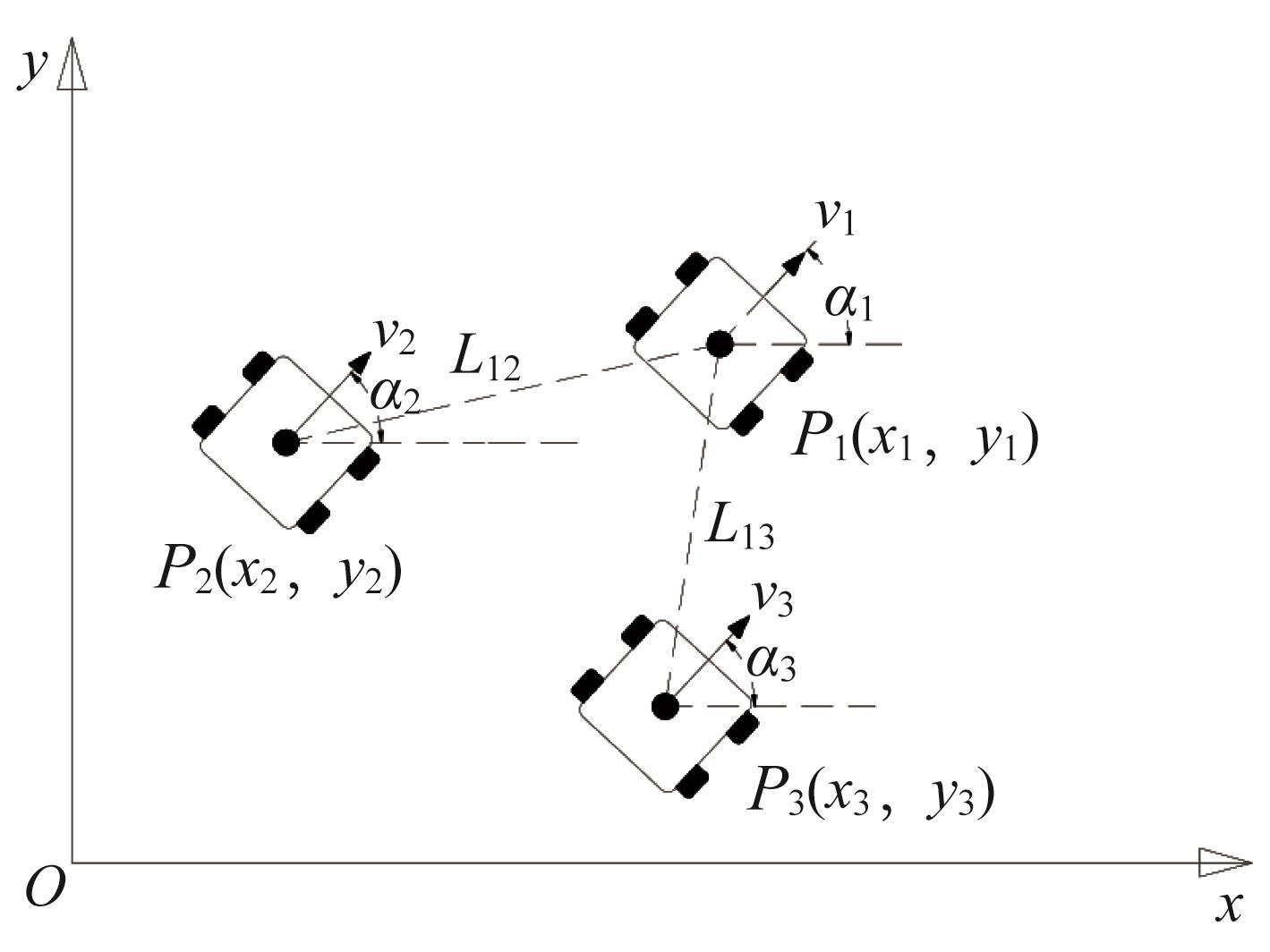
Fig.1 Kinematics model of a single environmental sanitation robot
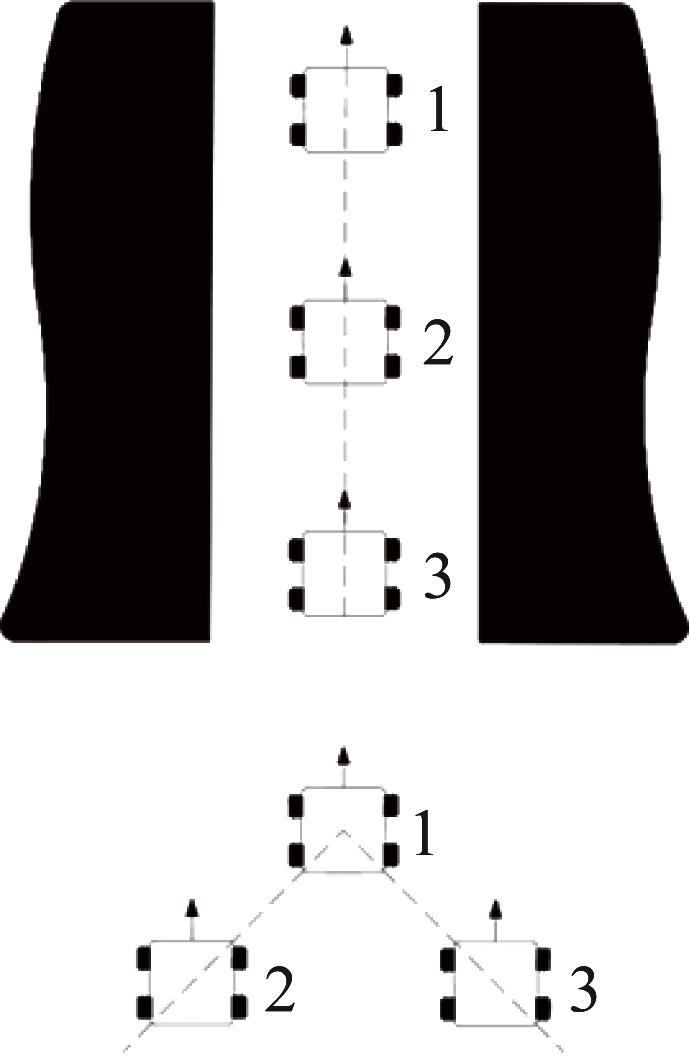
Fig.2 Actual operation formation of environmental sanitation robots
Fig.3 Environmental sanitation robot formation model
Fig.4 Obstacle avoidance process of environmental sanitation robot
Fig.5 Transformation of environmental sanitation robot formation
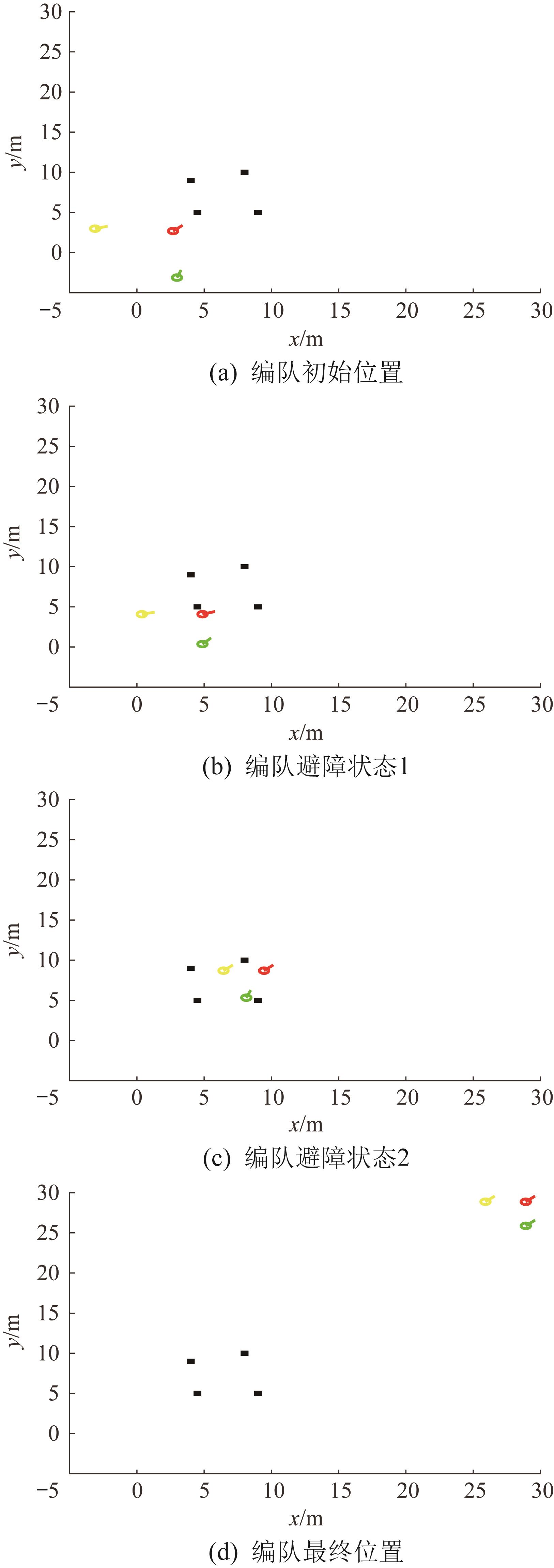
Fig.6 Motion state of environmental sanitation robot formation during obstacle avoidance
Fig. 7 Motion trajectory of environmental sanitation robot formation during obstacle avoidance
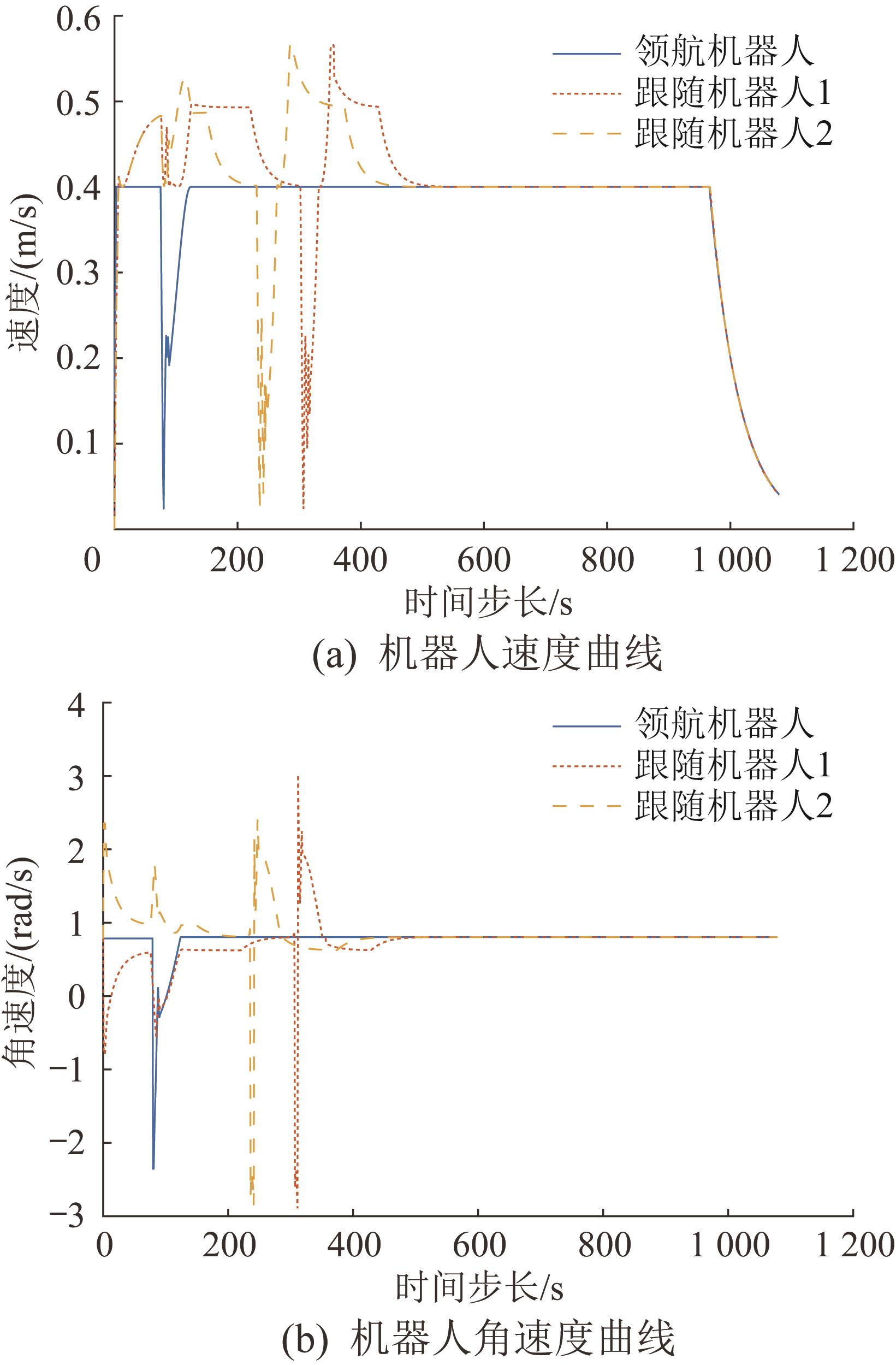
Fig.8 Speed and angular velocity curves of environmental sanitation robot formation during obstacle avoidance
Fig.9 Motion state of environmental sanitation robot formation during transformation
Fig.10 Motion trajectory of environmental sanitation robot formation during transformation
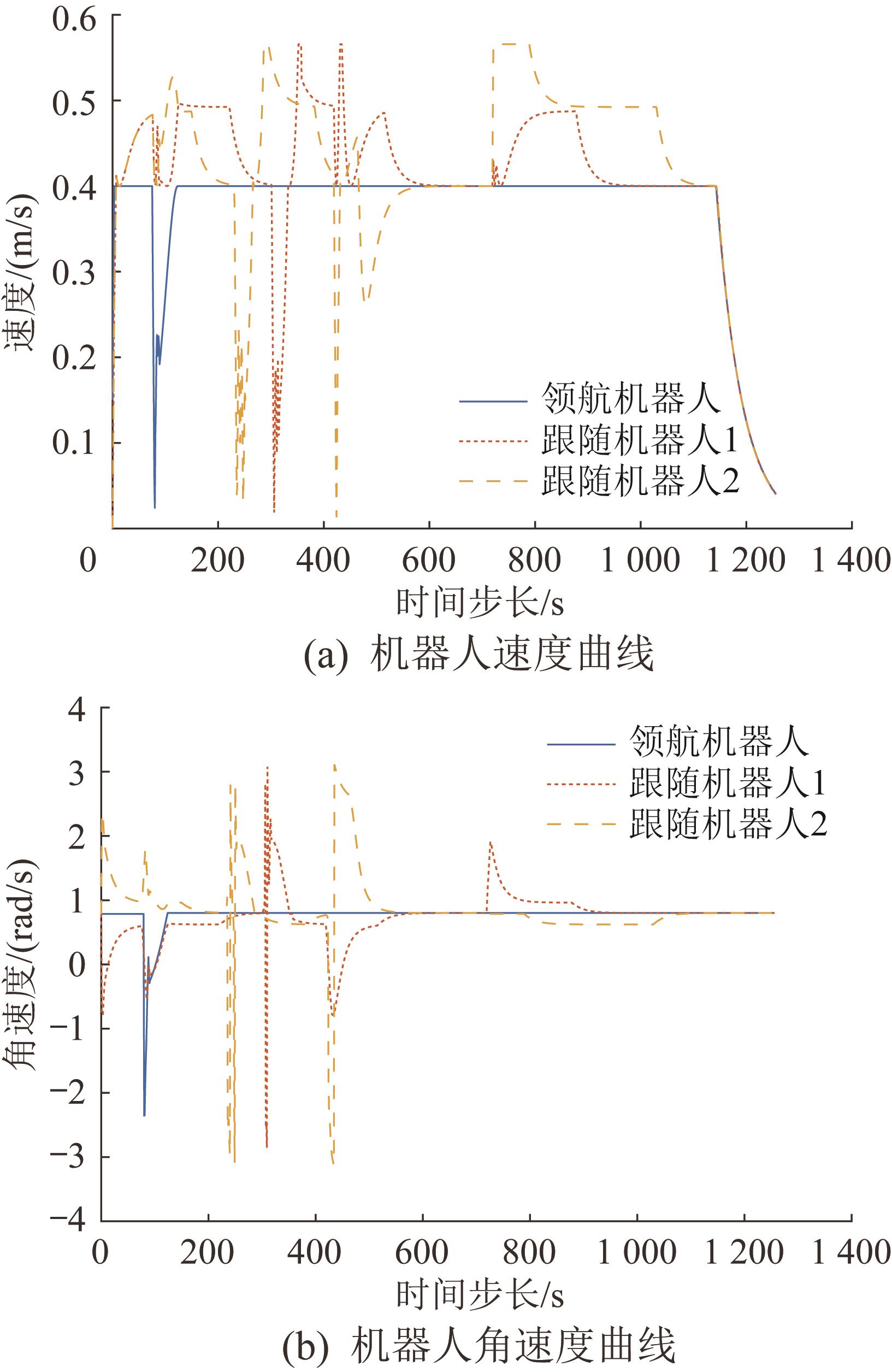
Fig.11 Speed and angular velocity curves of environmental sanitation robot formation during transformation
Fig.12 Tracking error of following robots
Fig.13 Formation of environmental sanitation robots
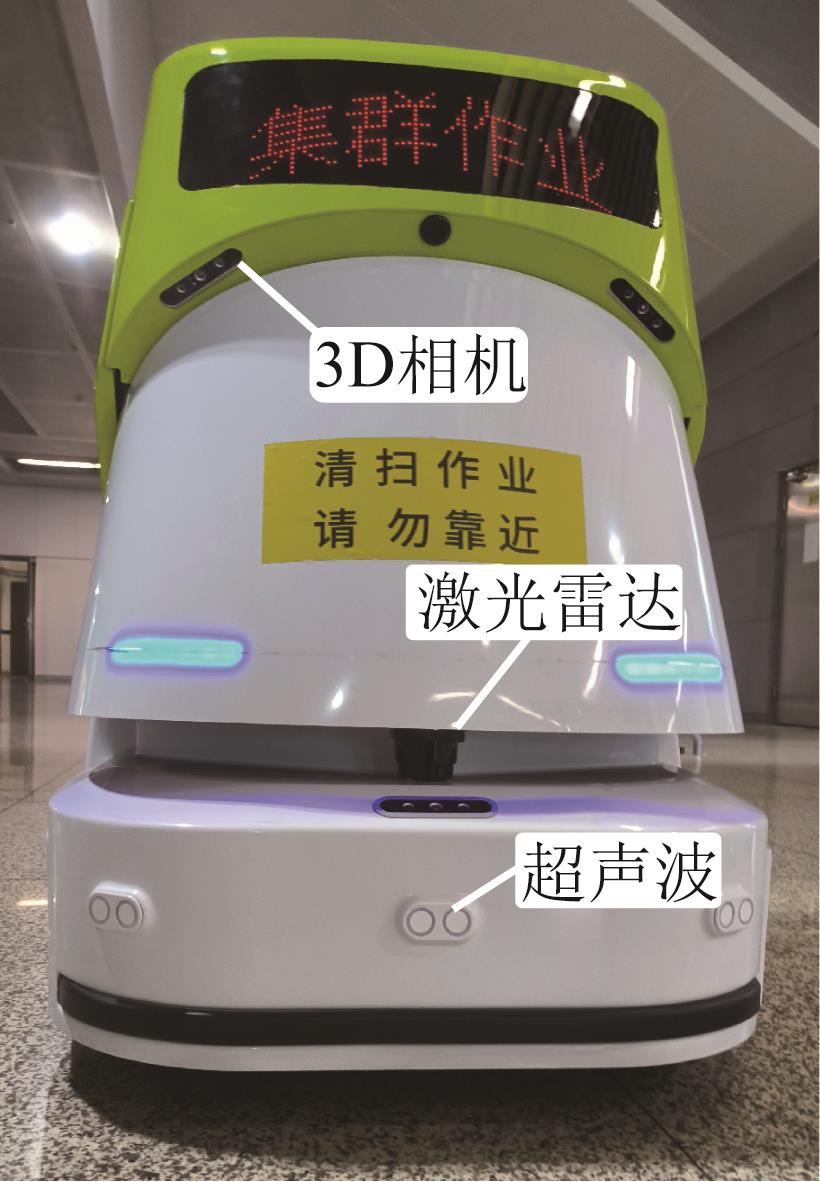
Fig.14 Structure of environmental sanitation robot
Fig.15 Experimental results of environmental sanitation robot formation operation
[1]
王耀南, 江一鸣, 姜娇, 等. 机器人感知与控制关键技术及其智能制造应用[J]. 自动化学报, 2023, 49(3): 494-513. WANG Y N, JIANG Y M, JIANG J, et al. Key technologies of robot perception and control and its intelligent manufacturing applications[J]. Acta Automatica Sinica, 2023, 49(3): 494-513.
[2]
ZHANG K T, CHERMPRAYONG P, XIAO F, et al. Aerial additive manufacturing with multiple autonomous robots[J]. Nature, 2022, 609(7928): 709-717.
[3]
张振国, 毛建旭, 谭浩然, 等. 重大装备制造多机器人任务分配与运动规划技术研究综述[J]. 自动化学报, 2024, 50(1): 21-41 ZHANG Z G, MAO J X, TAN H R, et al. A review of task allocation and motion planning for multi-robot in major equipment manufacturing[J]. Acta Automatica Sinica, 2024, 50(1): 21-41.
[4]
邓辅秦, 黄焕钊, 谭朝恩, 等. 结合遗传算法和滚动调度的多机器人任务分配算法[J]. 计算机应用, 2023, 43(12): 3833-3839. doi:10.11772/j.issn.1001-9081.2022121916 DENG F Q, HUANG H Z, TAN C E, et al. Multi-robot task allocation algorithm combining genetic algorithm and rolling scheduling[J]. Journal of Computer Applications, 2023, 43(12): 3833-3839.
doi: 10.11772/j.issn.1001-9081.2022121916
[5]
邓国琛. 无人车多车协同控制技术研究[D]. 济南: 济南大学, 2022: 1-5. DENG G C. Research on multi vehicle cooperative control technology of unmanned vehicle[D]. Jinan: University of Jinan, 2022: 1-5.
[6]
付雷, 秦一杰, 何顶新, 等. 基于改进人工势场法的多机器人编队避障[J]. 控制工程, 2022, 29(3): 388-396. FU L, QIN Y J, HE D X, et al. Obstacle avoidance in multi-robot formation based on improved artificial potential field[J]. Control Engineering of China, 2022, 29(3): 388-396.
[7]
PAN Z H, ZHANG C X, XIA Y Q, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(3): 1129-1133.
[8]
ZHUANG H C, DONG K L, WANG N, et al. Multi-robot leader grouping consistent formation control method research with low convergence time based on nonholonomic constraints[J]. Applied Sciences, 2022, 12(5): 2300.
[9]
DESAI J P, OSTROWSKI J, KUMAR V. Controlling formations of multiple mobile robots[C]//Proceedings of 1998 IEEE International Conference on Robotics and Automation. Leuven, May 20, 1998.
[10]
黎星华, 刘晓平, 王刚, 等. 面向多智能消防机器人的编队避障控制方法[J]. 机器人, 2024, 46(1): 81-93. LI X H, LIU X P, WANG G, et al. A formation obstacle-avoidance control method for multiple intelligent firefighting robots[J]. Robot, 2024, 46(1): 81-93.
[11]
王琳, 张庆杰, 陈宏伟. 基于领航者跟随者的群系统保性能编队控制[J]. 北京航空航天大学学报, 2024, 50(3): 1037-1046. WANG L, ZHANG Q J, CHEN H W. Guaranteed-performance formation control of swarm systems based on leader-follower strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(3): 1037-1046.
[12]
熊勇刚, 付茂林, 李波, 等. 基于领航-跟随法的多机器人编队控制[J]. 机电工程技术, 2024, 53(3): 136-141. XIONG Y G, FU M L, LI B, et al. Multi-robot formation control based on pilot-following method[J]. Mechanical & Electrical Engineering Technology, 2024, 53(3): 136-141.
[13]
庄红超, 王柠, 董凯伦, 等. 非完整约束大负重比六足机器人多机动态协同编队避障控制策略[J]. 机械工程学报, 2024, 60(1): 284-295. doi:10.3901/jme.2024.01.284 ZHUANG H C, WANG N, DONG K L, et al. Obstacle avoidance control strategy of multi-robot dynamic cooperative formation of large-load-ratio six-legged robot under nonholonomic constraints[J]. Journal of Mechanical Engineering, 2024, 60(1): 284-295.
doi: 10.3901/jme.2024.01.284
[14]
张晓莉, 王张哲. 基于领航-跟随模型的井下多移动机器人编队研究[J]. 矿业研究与开发, 2022, 42(2): 179-182. ZHANG X L, WANG Z Z. Research on underground multi-mobile robots formation based on leader-follower model[J]. Mining Research and Development, 2022, 42(2): 179-182.
[15]
陈冠星. 动态环境下多机器人编队及避障控制策略研究[D]. 南京: 南京理工大学, 2021: 38-43. CHEN G X. Research on formation and obstacle avoidance control strategy of multiple robots in dynamic environment[D]. Nanjing: Nanjing University of Science and Technology, 2021: 38-43.
[16]
ZHANG T, DONG D B, DU Z Z, et al. Swarm control based on artificial potential field method with predicted state and input threshold[J]. Engineering Applications of Artificial Intelligence, 2023, 125: 106567.
[17]
ZHANG W, XU G J, SONG Y, et al. An obstacle avoidance strategy for complex obstacles based on artificial potential field method[J]. Journal of Field Robotics, 2023, 40(5): 1231-1244.
[18]
杨立炜, 李萍, 权赫, 等. 基于蚁群混合人工势场法的多机器人编队运动[J]. 电光与控制, 2024, 31(9): 52-57, 80. YANG L W, LI P, QUAN H, et al. Motion of multi-robot formation based on ACO and APF[J]. Electronics Optics & Control, 2024, 31(9): 52-57, 80.
[19]
辛鹏, 王艳辉, 刘晓立, 等. 优化改进RRT和人工势场法的路径规划算法[J]. 计算机集成制造系统, 2023, 29(9): 2899-2907. XIN P, WANG Y H, LIU X L, et al. Path planning algorithm based on optimize and improve RRT and artificial potential field[J]. Computer Integrated Manufacturing Systems, 2023, 29(9): 2899-2907.
[20]
时培成, 陈旭, 杨爱喜, 等. 4WID-4WIS智能车阿克曼转向轨迹规划及位置估算[J]. 工程设计学报, 2022, 29(2): 123-132. SHI P C, CHEN X, YANG A X, et al. Ackerman steering trajectory planning and position estimation of 4WID-4WIS intelligent vehicle[J]. Chinese Journal of Engineering Design, 2022, 29(2): 123-132.