1.School of Mechanical and Electrical Engineering, Southwest Petroleum University, Chengdu 610500, China 2.School of Intelligent Manufacturing, Chengdu Technology University, Chengdu 611730, China 3.Sichuan Special Equipment Inspection Institute, Chengdu 610061, China
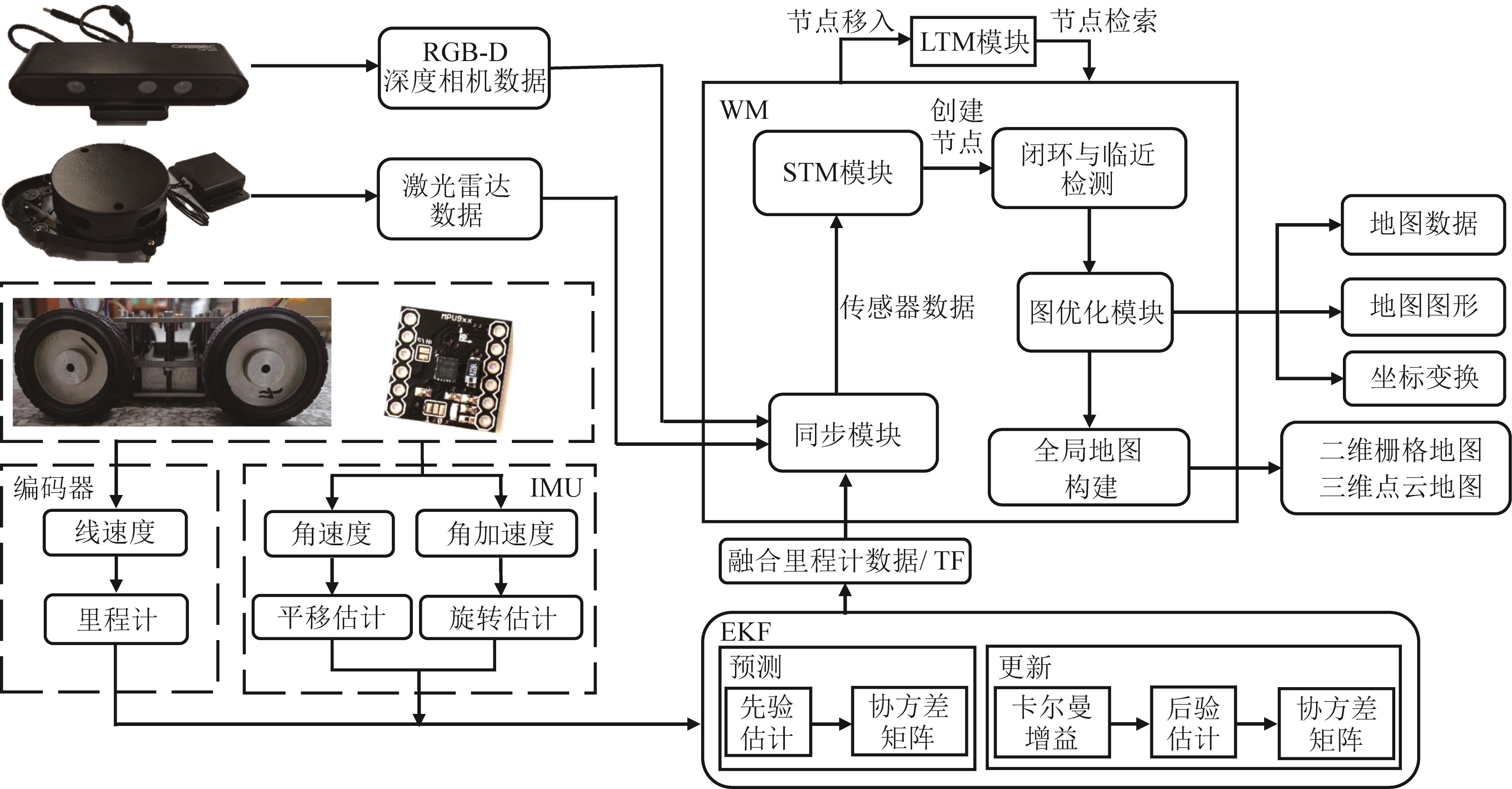
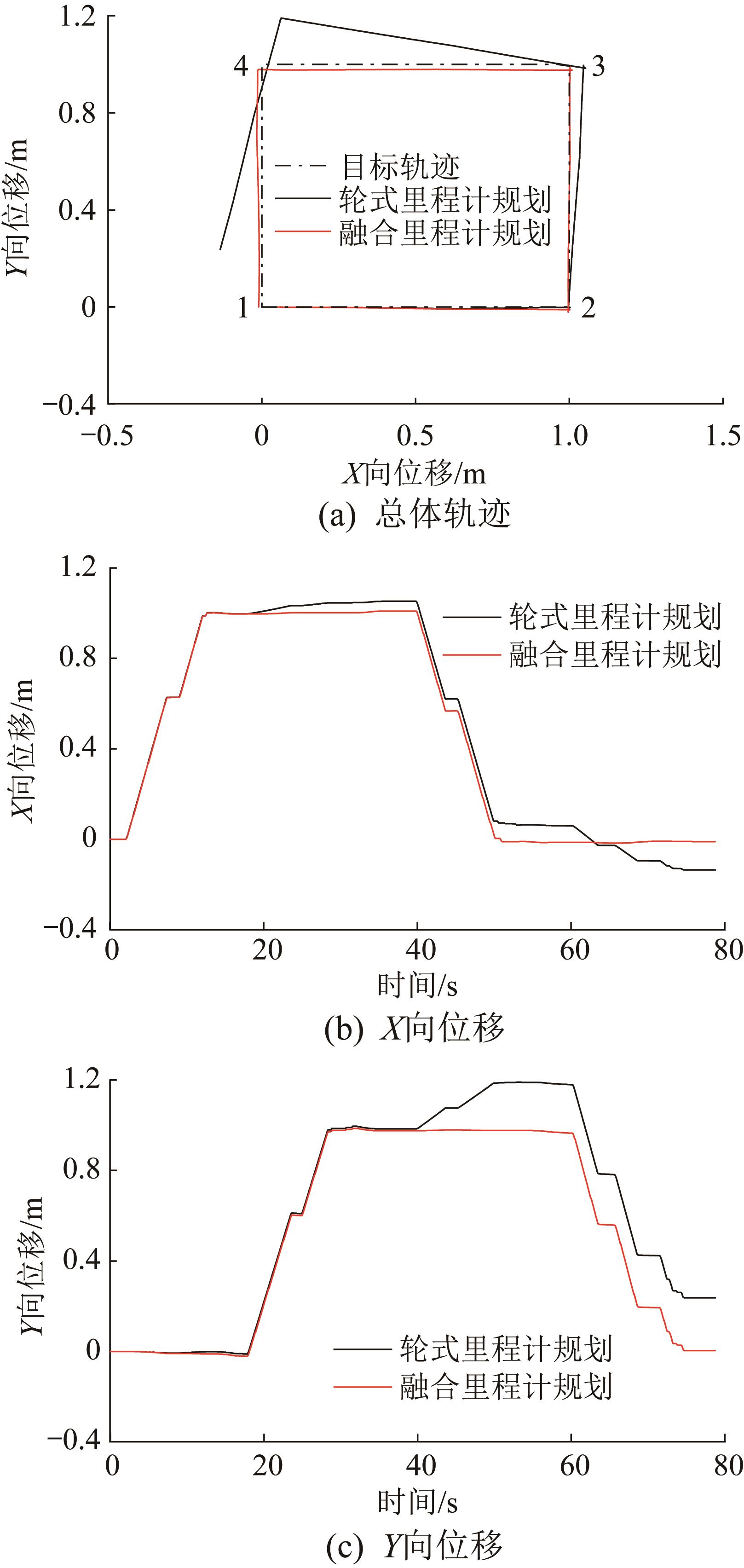
Aiming at the difficulty of wall-climbing robot in wall sensing and automated detection of large petrochemical equipment, an improved RTAB-Map (real-time appearance-based mapping) algorithm was proposed to realize the wall-climbing robot's localization, mapping and navigation by fusing multiple sensor data. Firstly, a robot motion chassis with wall adsorption ability was built to ensure the flexible and stable movement of the wall-climbing robot on the wall surface. Secondly, to address the cumulative error of the odometer resulting from the wall-climbing robot's slippage on the wall surface, the extended Kalman filter was utilized to fuse the data of encoder and inertial measurement unit to provide accurate odometer information for mapping and navigation. Thirdly, based on the RTAB-Map algorithm, the data of depth camera, LiDAR and odometer were fused to generate 2D grid and 3D point cloud map to realize a complete description of the equipment wall, and the navigation algorithm framework of the wall-climbing robot was constructed based on the fusion data. Finally, the experimental validation was carried out on the equipment wall. The results showed that the yaw angle error could be significantly reduced by using fusion mileage method, the average error of yaw angle was reduced by 88.94% compared with that under wheel odometer planning with an average error of 0.78°. The improved RTAB-Map algorithm improved the wall-climbing robot's mapping and sensing ability in the wall environment, and realized the autonomous navigation combined with the path planning algorithm. The research results have a certain reference significance for the research and application of automated detection technology of wall-climbing robots.
Chao QIN,Donglin TANG,Dongpan YOU,Chao DING,Sheng RAO,Yuanyuan HE. Research on navigation of wall-climbing robot based on improved RTAB-Map algorithm. Chinese Journal of Engineering Design, 2025, 32(1): 32-41.
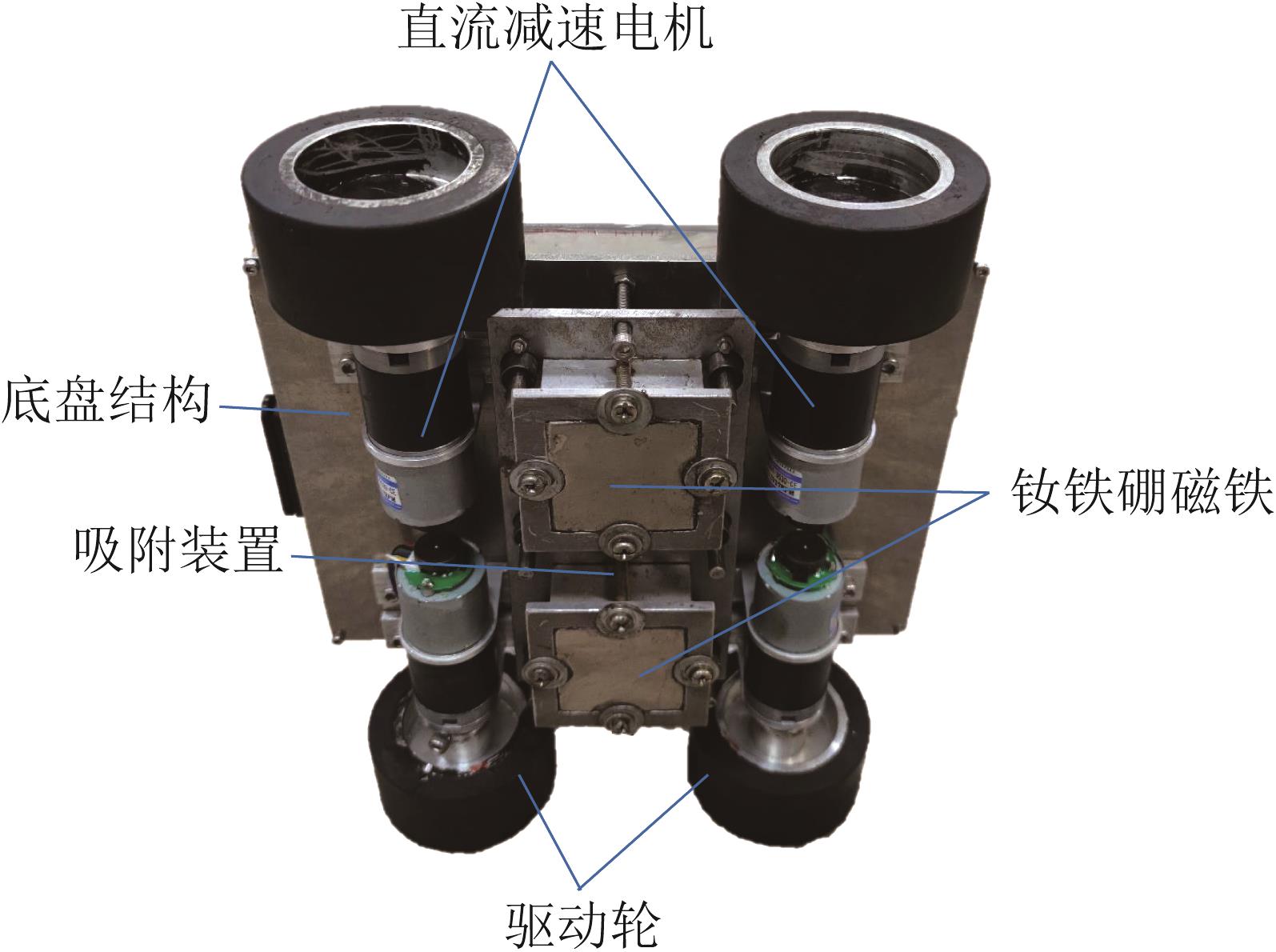
Table 1Main technical parameters of chassis structure of wall-climbing robot
Fig.3 Improved RTAB-Map algorithm framework
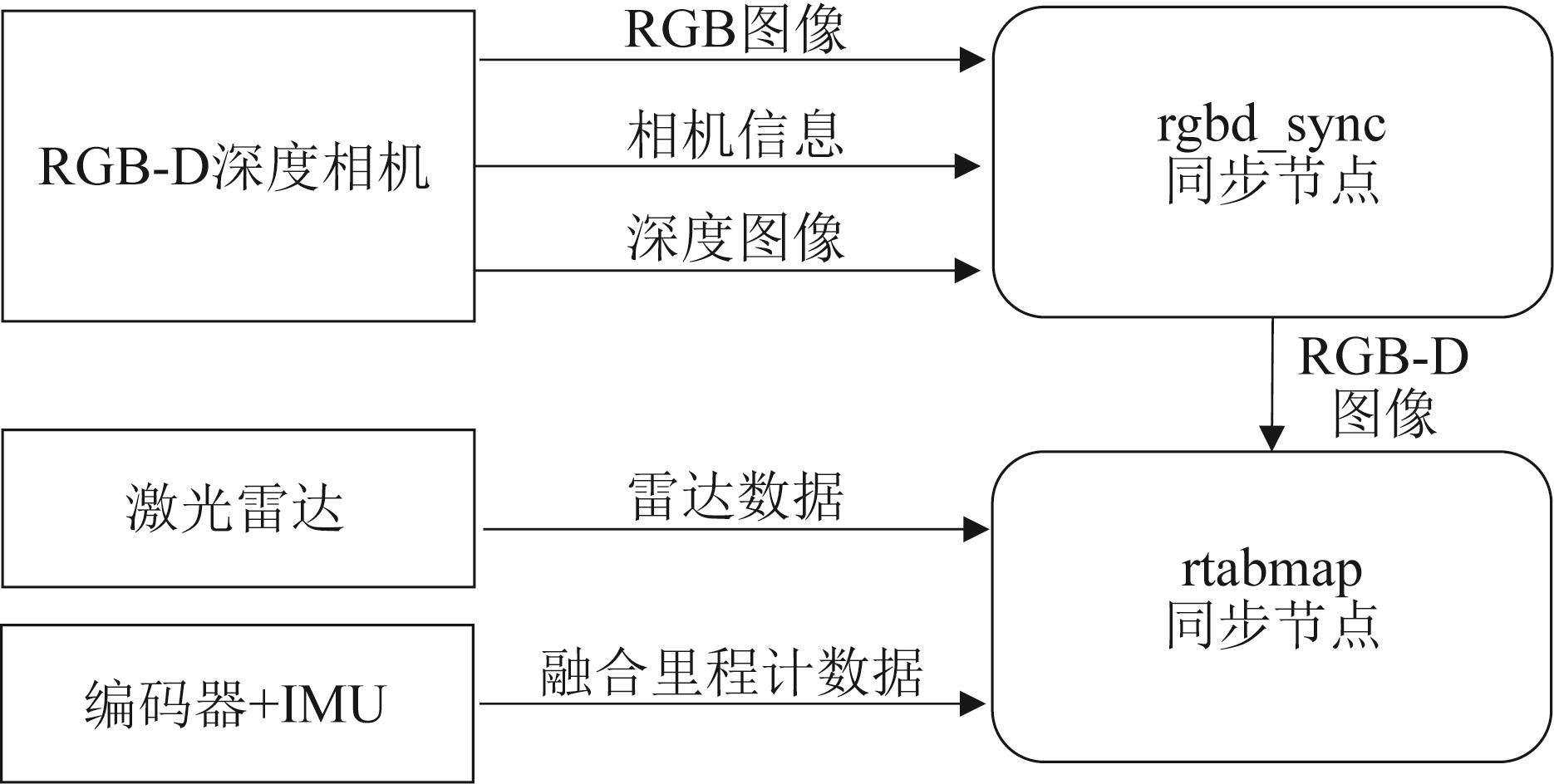
Fig.4 Sensor data synchronization process
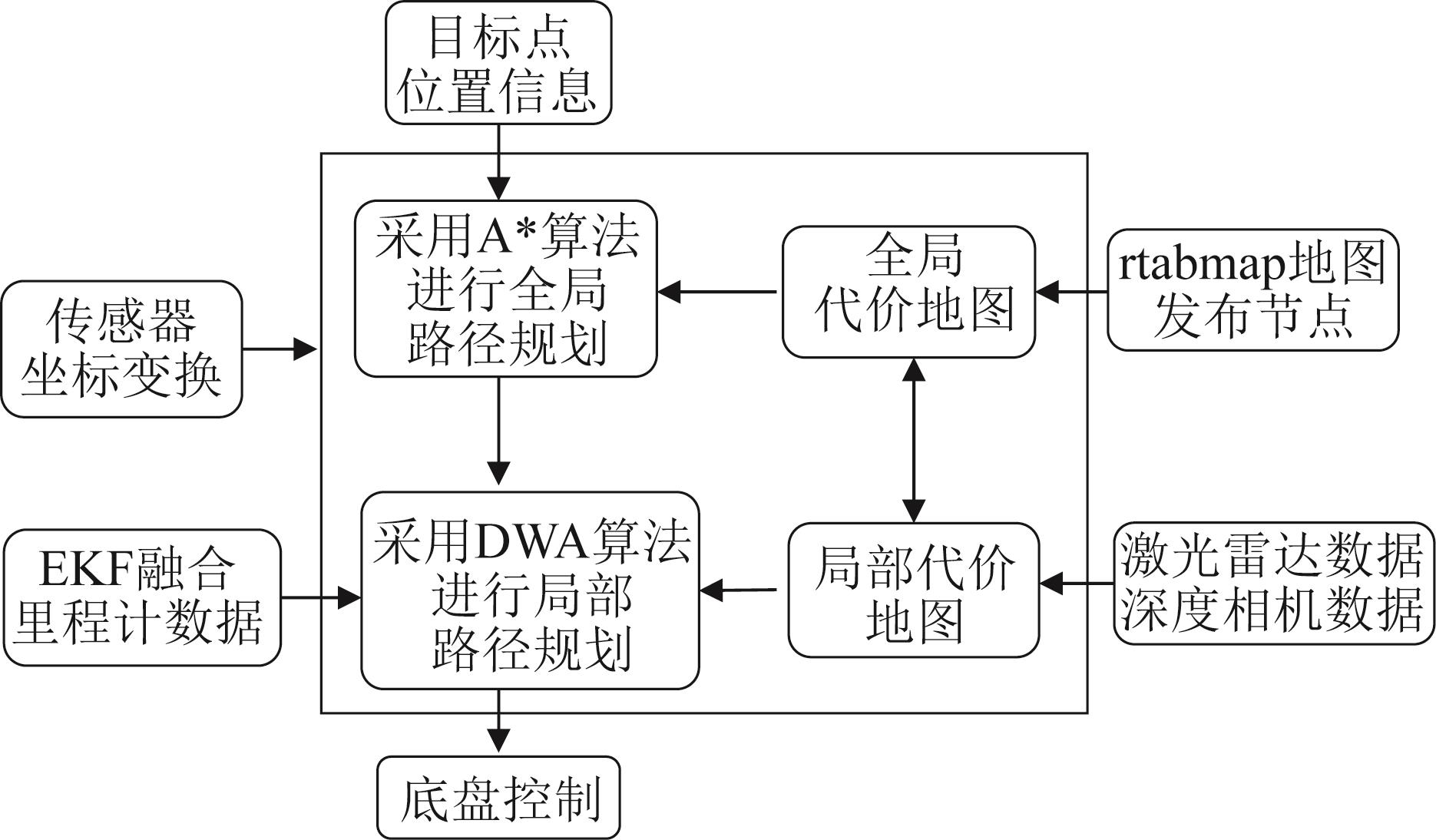
Fig.5 Navigation algorithm framework
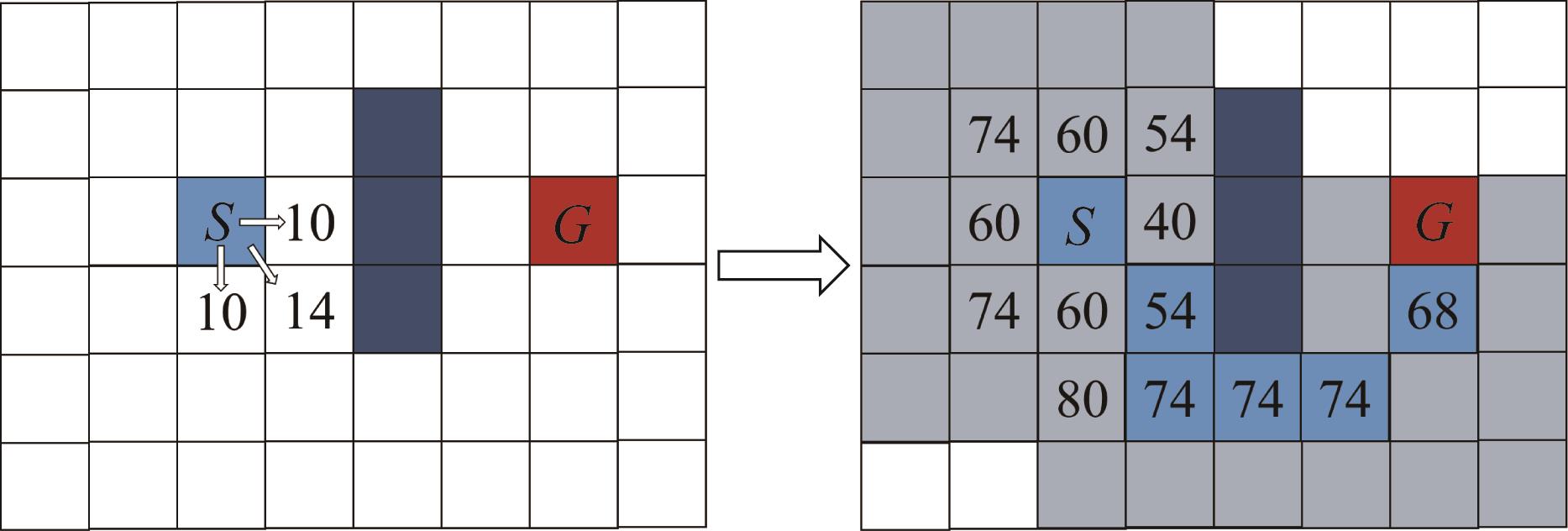
Fig.6 A* algorithm schematic
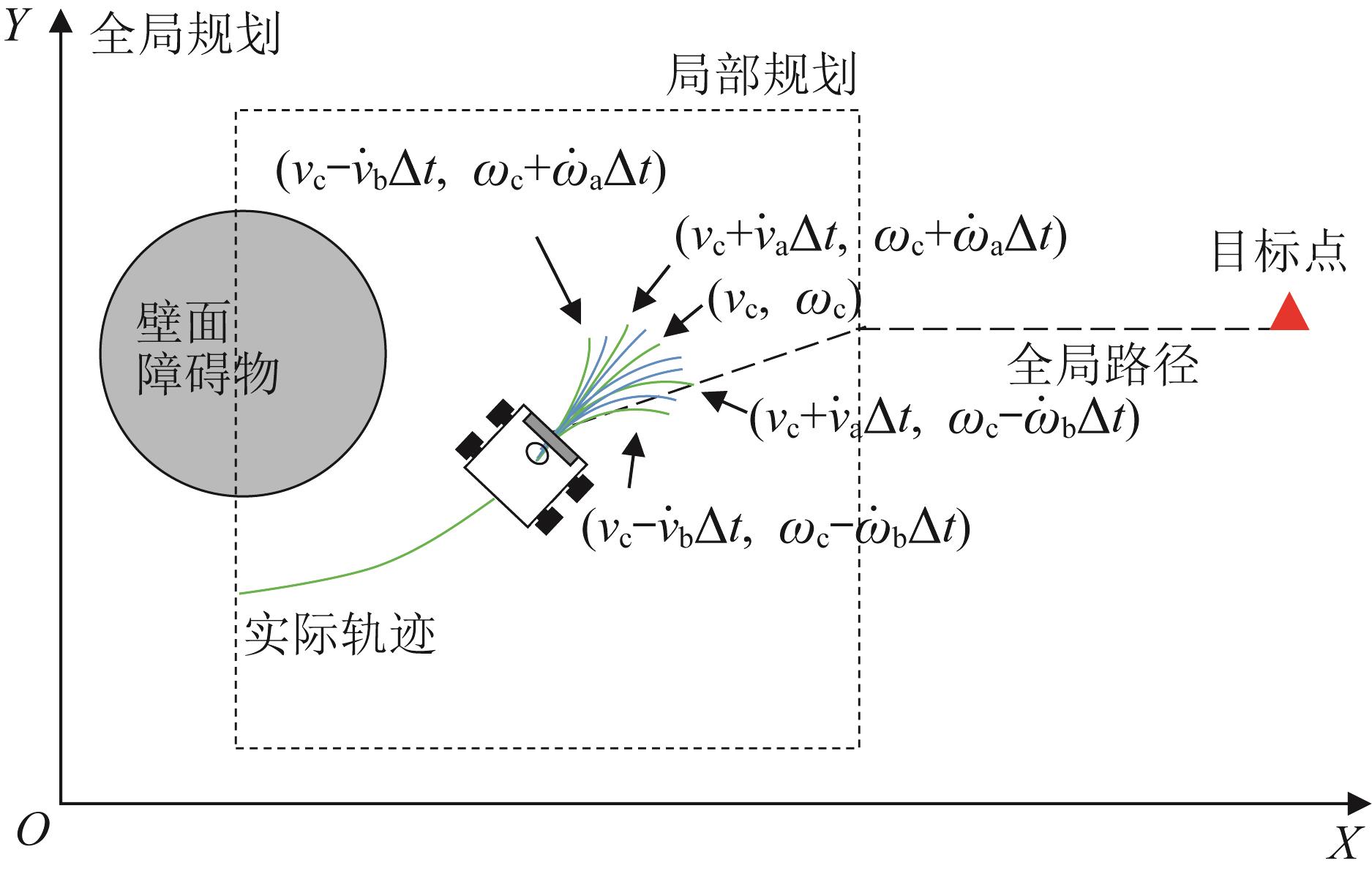
Fig.7 Schematic diagram of robot wall trajectory reckoning
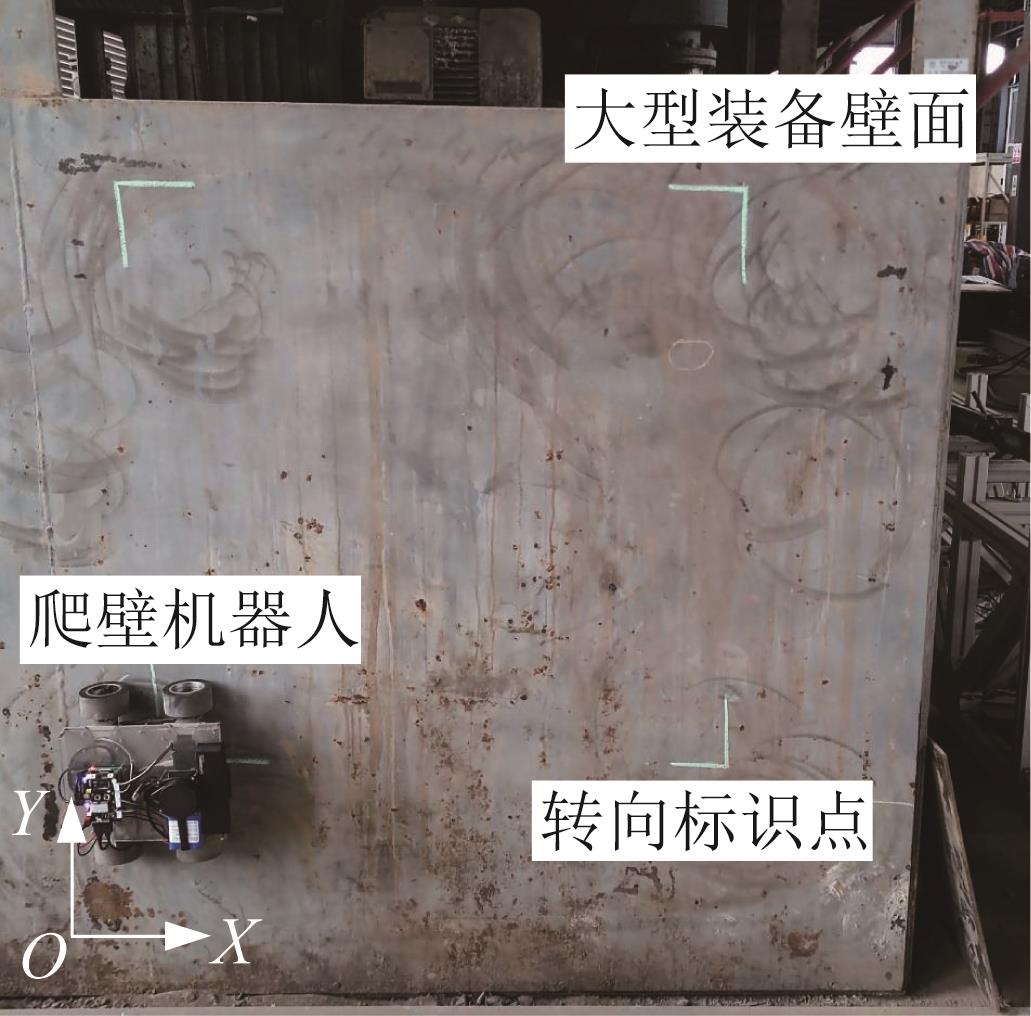
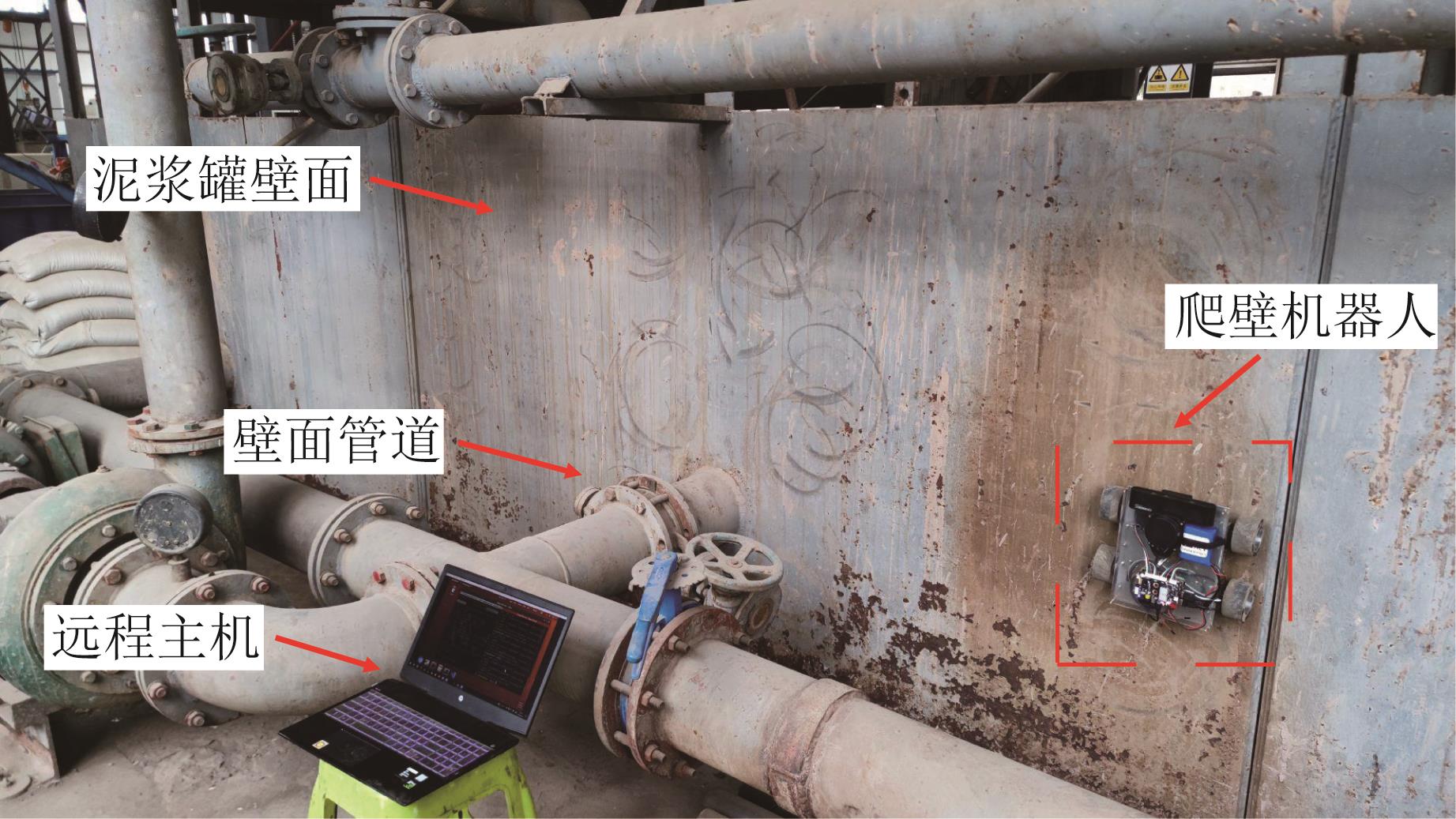
Fig.8 Odometer error test site
Fig.9 Movement trajectory of wall-climbing robot
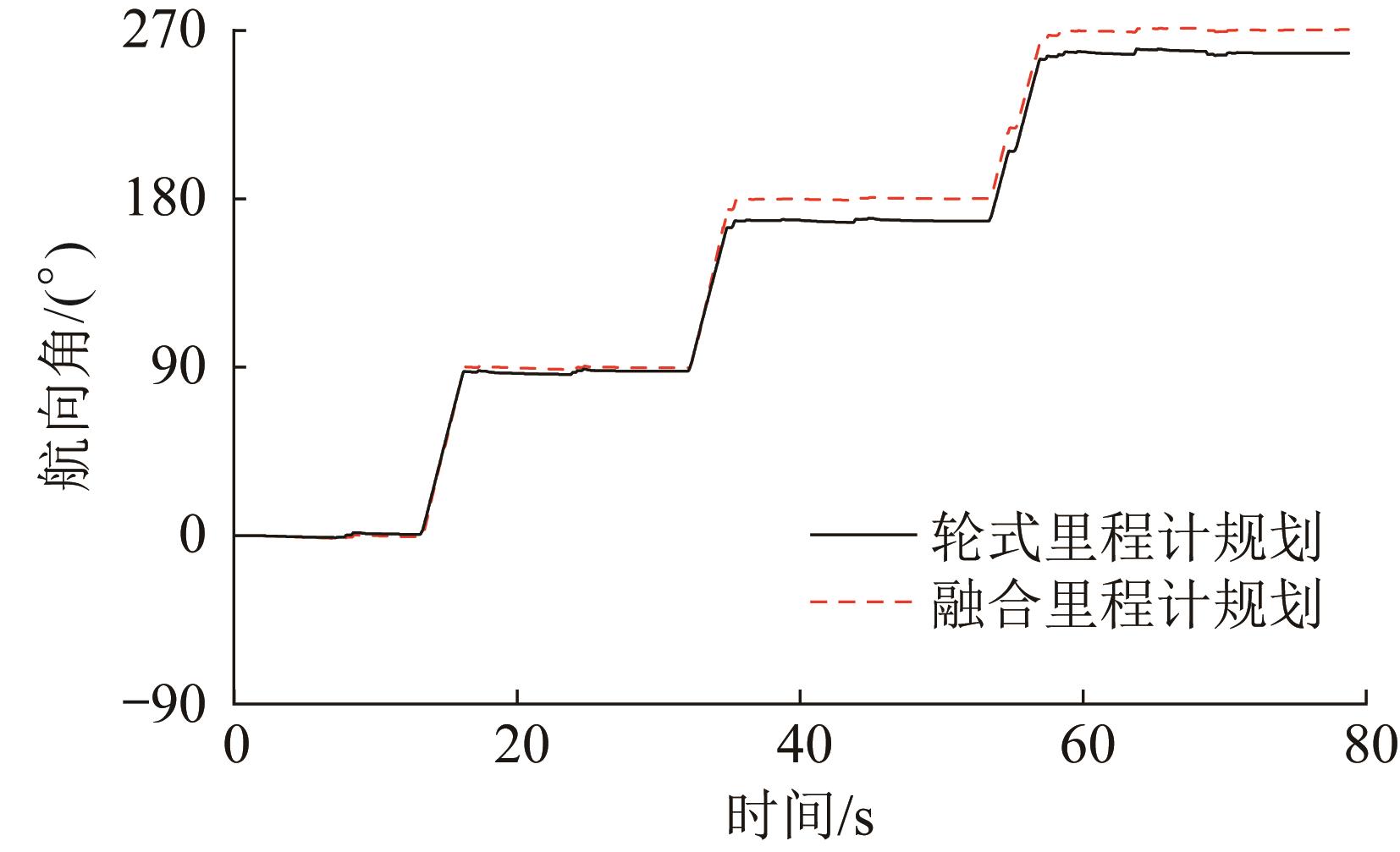
Fig.10 Yaw angle of wall-climbing robot
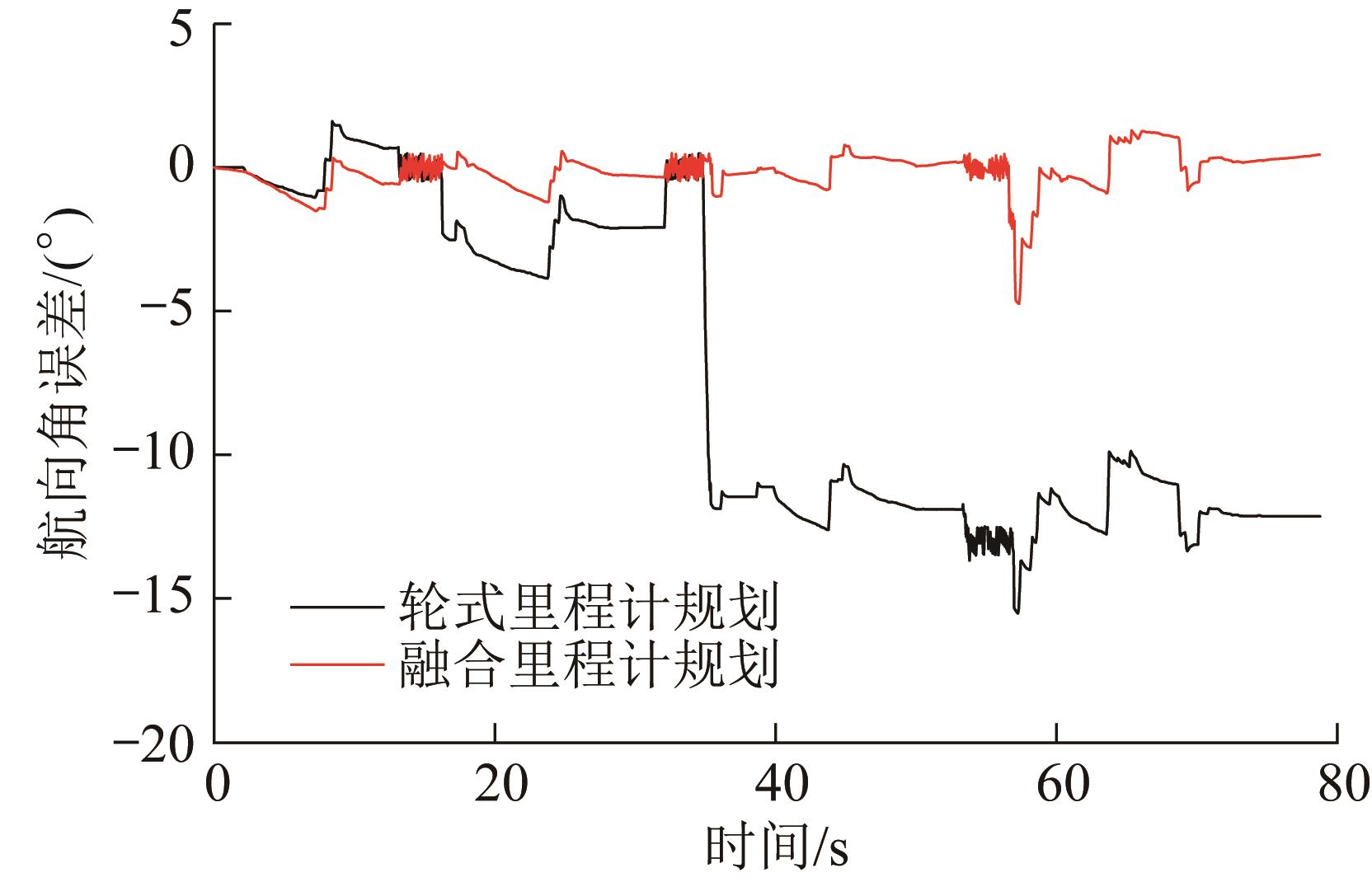
Fig.11 Yaw angle error of wall-climbing robot
序号
融合前误差/(°)
融合后误差/(°)
最大值
平均值
最大值
平均值
1
13.27
6.38
2.12
0.85
2
12.75
6.03
1.80
0.68
3
13.99
8.60
0.48
0.02
4
12.75
6.06
3.37
0.60
5
13.60
7.64
3.57
1.82
6
13.07
7.00
2.18
0.56
7
13.63
6.98
2.06
0.51
8
14.42
8.79
2.55
0.53
9
13.19
6.40
3.35
1.38
10
13.92
6.43
2.02
0.85
Table 2Yaw angle errors of wall-climbing robot before and after fusion
Fig.12 Robot wall climbing experiment platform
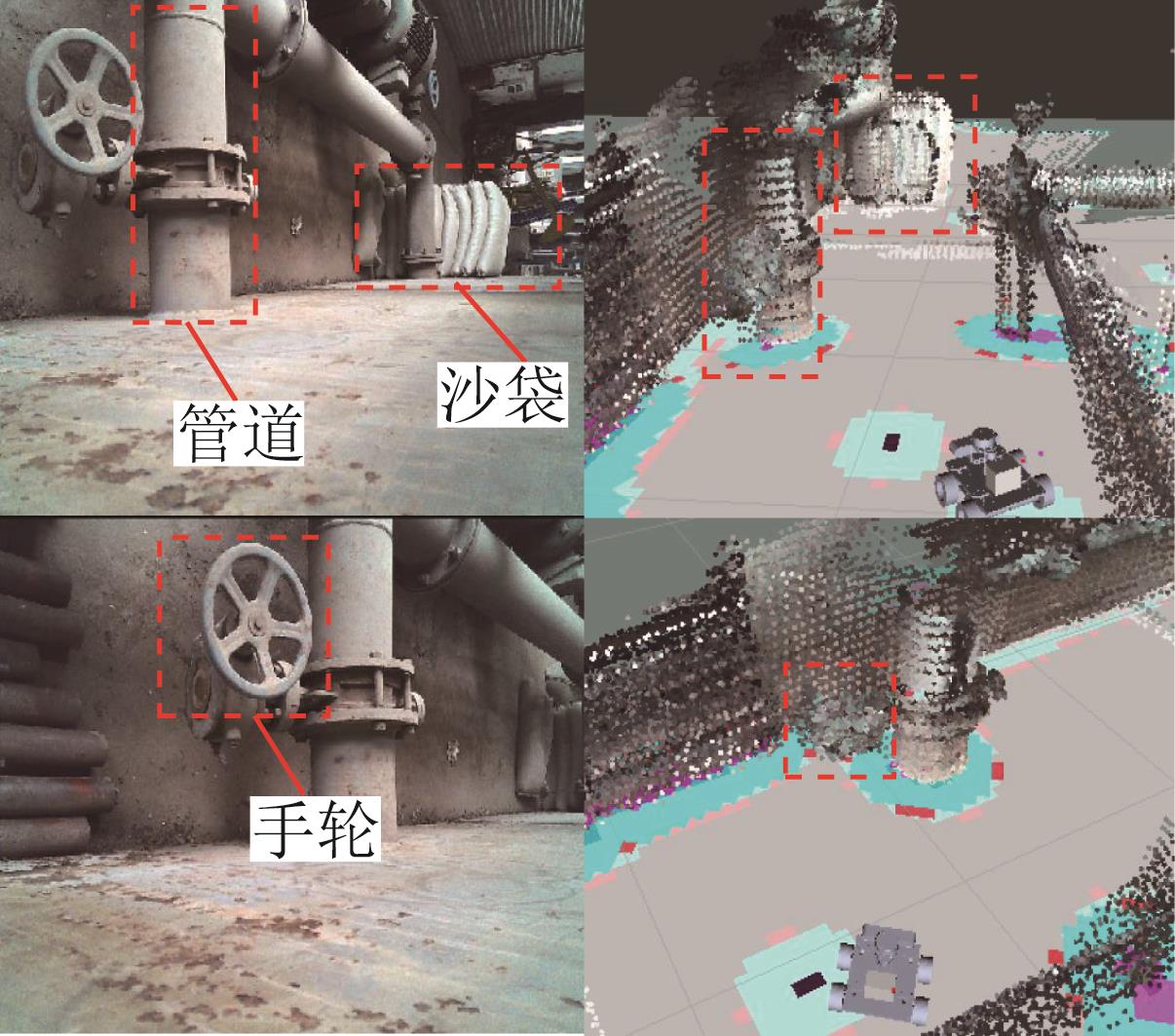
Fig.13 Wall environment mapping effect
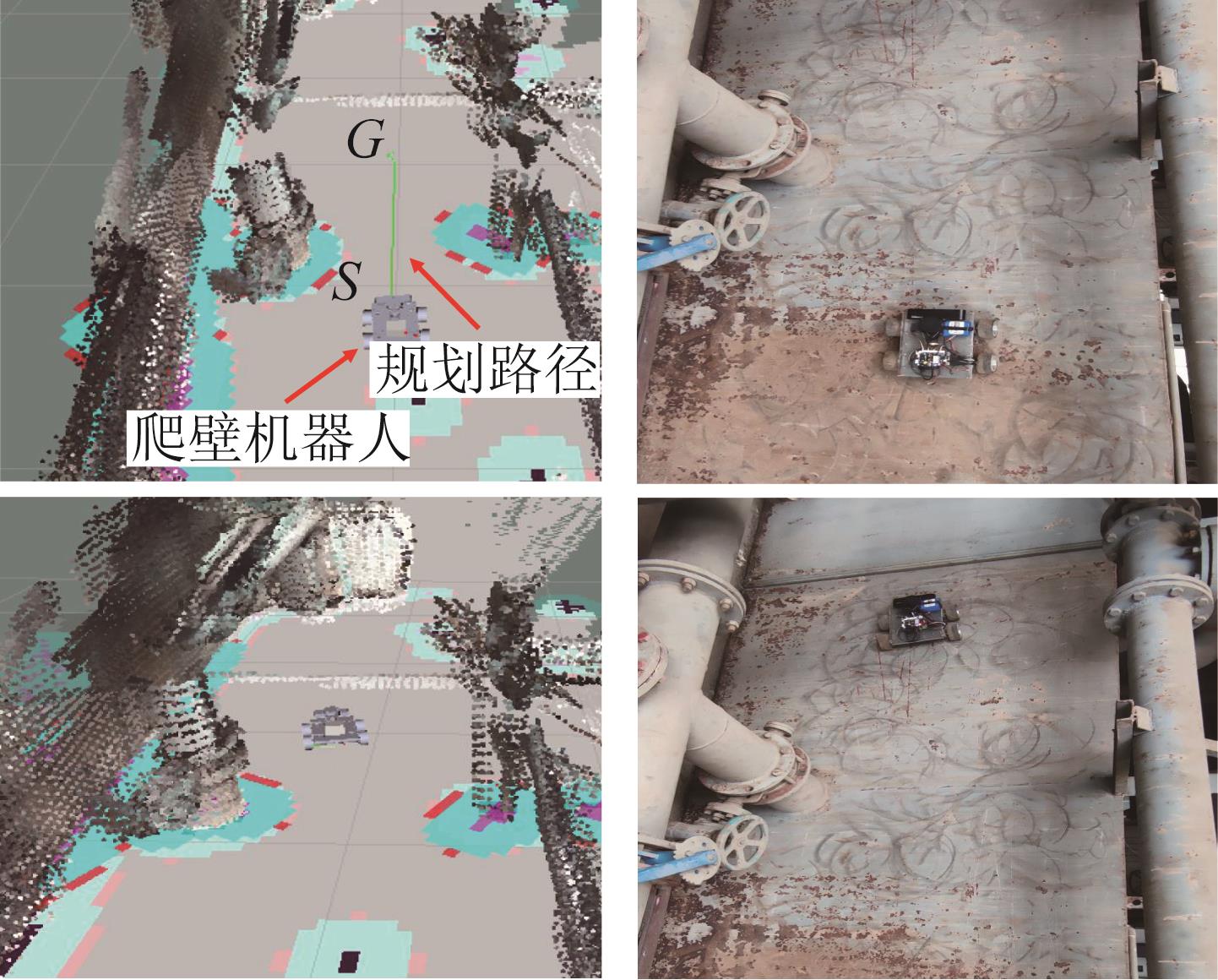
Fig.14 Robot navigation experiment on wall
参数
数值
参数
数值
最大牵引速度/(m/s)
0.15
最大角速度/(rad/s)
0.5
最小牵引速度/(m/s)
0
最小角速度/(rad/s)
0.1
最大加/减速度/(m/s2)
0.5
最大角加/减速度/(rad/s2)
3.5
牵引速度采样点数量/个
10
角速度采样点数量/个
10
Table 3Kinematic parameters for navigation experiment
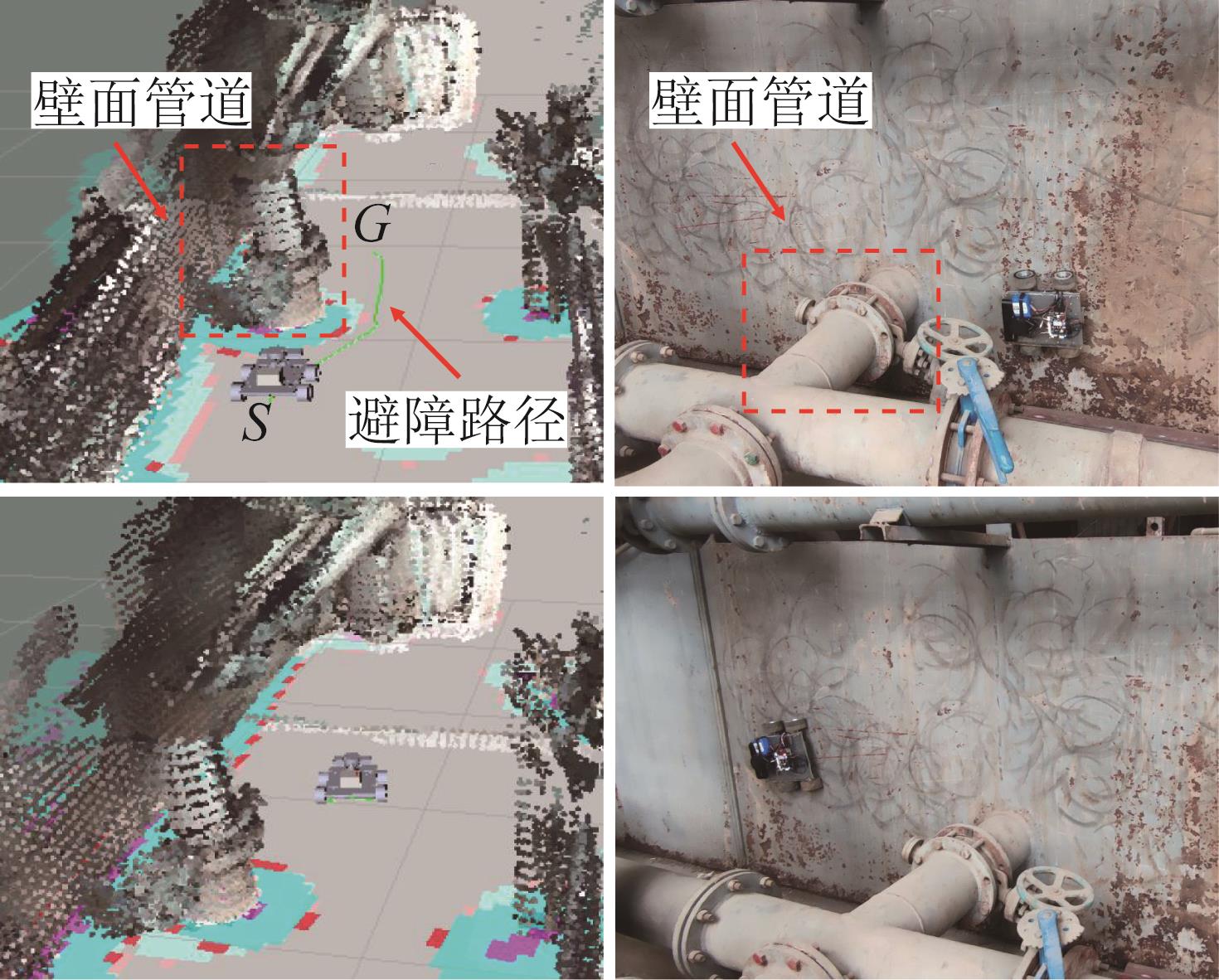
Fig.15 Robot wall obstacle avoidance experiment
[1]
ZHANG B Y, LI H H, WANG W. Numerical study of dynamic response and failure analysis of spherical storage tanks under external blast loading[J]. Journal of Loss Prevention in the Process Industries, 2015, 34: 209-217.
[2]
赵金龙, 唐卿, 黄弘, 等. 基于数值模拟的大型外浮顶储罐区定量风险评估[J]. 清华大学学报(自然科学版), 2015, 55(10): 1143-1149. ZHAO J L, TANG Q, HUANG H, et al. Quantitative risk assessment of external floating roof tank areas based on the numerical simulations[J]. Journal of Tsinghua University (Science and Technology), 2015, 55(10): 1143-1149.
[3]
卢俊华, 朱海飞, 梁经伦, 等. 双足爬壁机器人三维壁面环境全局路径规划[J]. 哈尔滨工业大学学报, 2020, 52(1): 148-155. LU J H, ZHU H F, LIANG J L, et al. Global path planning for a biped wall-climbing robot in 3D wall environment[J]. Journal of Harbin Institute of Technology, 2020, 52(1): 148-155.
[4]
宋伟, 姜红建, 王滔, 等. 爬壁机器人磁吸附组件优化设计与试验研究[J]. 浙江大学学报(工学版), 2018, 52(10): 1837-1844. SONG W, JIANG H J, WANG T, et al. Optimization design and experimental research on magnetic components for wall-climbing robot[J]. Journal of Zhejiang University (Engineering Science), 2018, 52(10): 1837-1844.
[5]
FANG Y, WANG S, BI Q S, et al. Design and technical development of wall-climbing robots: a review[J]. Journal of Bionic Engineering, 2022, 19(4): 877-901.
[6]
方璇, 刘俊锋, 陈勇. 基于SLAM的爬壁机器人自主移动研究[J]. 制造业自动化, 2023, 45(6): 85-88. FANG X, LIU J F, CHEN Y. Research on autonomous movement of the wall-climbing robot based on SLAM[J]. Manufacturing Automation, 2023, 45(6): 85-88.
[7]
丁超, 李刚俊, 唐东林. 储罐轮式机器人转向磁吸附力[J]. 科学技术与工程, 2019, 19(27): 217-223. DING C, LI G J, TANG D L. Dynamic magnetic adsorption force of tank wheeled robot steering[J]. Science Technology and Engineering, 2019, 19(27): 217-223.
[8]
ZHANG X J, ZHANG X, ZHANG M L, et al. Optimization design and flexible detection method of wall-climbing robot system with multiple sensors integration for magnetic particle testing[J]. Sensors, 2020, 20(16): 4582.
[9]
张文, 杨耀鑫, 黄天帜, 等. ArUco辅助的爬壁机器人自主定位方法[J]. 机器人, 2024, 46(1): 27-35, 44. ZHANG W, YANG Y X, HUANG T Z, et al. ArUco-assisted autonomous localization method for wall climbing robots[J]. Robot, 2024, 46(1): 27-35, 44.
[10]
张文, 丁雨林, 陈咏华, 等. 基于外部视觉与机载IMU组合的爬壁机器人自主定位方法[J]. 清华大学学报(自然科学版), 2022, 62(9): 1524-1531. ZHANG W, DING Y L, CHEN Y H, et al. Autonomous positioning for wall climbing robots based on a combination of an external camera and a robot-mounted inertial measurement unit[J]. Journal of Tsinghua University (Science and Technology), 2022, 62(9): 1524-1531.
[11]
张小俊, 刘昊学. 基于数据融合的爬壁机器人控制系统设计[J]. 传感器与微系统, 2023, 42(4): 103-106. ZHANG X J, LIU H X. Design of wall-climbing robot control system based on data fusion[J]. Transducer and Microsystem Technologies, 2023, 42(4): 103-106.
[12]
丁杰月, 张延兵, 谈英姿. 基于多传感器融合的爬壁机器人控制系统研究[J]. 机械设计与制造工程, 2018, 47(12): 57-62. DING J Y, ZHANG Y B, TAN Y Z. Research on the control system of wall-climbing robot based on multi-sensor fusion[J]. Machine Design and Manufacturing Engineering, 2018, 47(12): 57-62.
[13]
汪潼, 朱世强, 宋伟, 等. 立式罐容量计量中爬壁机器人的路径规划[J]. 机器人, 2024, 46(1): 36-44. WANG T, ZHU S Q, SONG W, et al. Path planning for wall-climbing robot in volume measurement of vertical tank[J]. Robot, 2024, 46(1): 36-44.
[14]
张军, 韦鹏, 王古超. 基于ROS的全向移动机器人定位导航系统研究[J]. 组合机床与自动化加工技术, 2020(6): 119-122. doi:10.18178/ijmerr.9.11.1502-1508 ZHANG J, WEI P, WANG G C. Research on location and navigation system for omnidirectional mobile robot based on ROS[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020(6): 119-122.
doi: 10.18178/ijmerr.9.11.1502-1508
[15]
危双丰, 庞帆, 刘振彬, 等. 基于激光雷达的同时定位与地图构建方法综述[J]. 计算机应用研究, 2020, 37(2): 327-332. doi:10.19734/j.issn.1001-3695.2018.09.0674 WEI S F, PANG F, LIU Z B, et al. Survey of LiDAR-based SLAM algorithm[J]. Application Research of Computers, 2020, 37(2): 327-332.
doi: 10.19734/j.issn.1001-3695.2018.09.0674
[16]
郑丽丽, 孙伟, 刘明明. 基于粒子滤波的自主移动机器人快速定位方法[J]. 传感器与微系统, 2020, 39(10): 31-34. ZHENG L L, SUN W, LIU M M. Fast localization method of autonomous mobile robots based on particle filtering[J]. Transducer and Microsystem Technologies, 2020, 39(10): 31-34.
[17]
LIU Y H, LIM B, LEE J W, et al. Steerable dry-adhesive linkage-type wall-climbing robot[J]. Mechanism and Machine Theory, 2020, 153: 103987.
[18]
LIU J F, XU L S, XU J J, et al. Analysis and optimization of the wall-climbing robot with an adsorption system and adhesive belts[J]. International Journal of Advanced Robotic Systems, 2020, 17(3): 1729881420926409.
[19]
汪建华, 黄磊, 石雨婷, 等. 基于优化Hector-SLAM算法的机器人自主导航系统设计[J]. 工程设计学报, 2023, 30(6): 678-686. WANG J H, HUANG L, SHI Y T, et al. Design of robot autonomous navigation system based on optimized Hector-SLAM algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 678-686.
[20]
LI Y Q, TANG X D, LI Z K, et al.Multi-sensor information fusion for mobile robots[J].Journal of Northwestern Polytechnical University, 2021,39(S1):59-65.
[21]
COLONNIER F, DELLA VEDOVA L, ORCHARD G. ESPEE: event-based sensor pose estimation using an extended Kalman filter[J]. Sensors, 2021, 21(23): 7840.
[22]
MALLIOS A, RIDAO P, RIBAS D, et al. EKF-SLAM for AUV navigation under probabilistic sonar scan-matching[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2010: 4404-4411.
[23]
LABBÉ M, MICHAUD F. RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation[J]. Journal of Field Robotics, 2019, 36(2): 416-446.
[24]
HUANG Z, XU Z, CAO Z, et al. Graphic information processing algorithm based on visual word-of-bag model [J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2015, 43: 233-236.
[25]
LIN Y Z, FENG C H, WANG Z X, et al. UAV design and control with A* algorithm[J]. International Core Journal of Engineering, 2021, 7(12): 212-224.