| Whole Machine and System Design |
|

|
|
|
| Research on navigation system of roadheader based on combination mode |
Li-yong TIAN( ),Ye-xin SUN,Ning YU,Hong-yue CHEN,Chun-ying MA ),Ye-xin SUN,Ning YU,Hong-yue CHEN,Chun-ying MA |
| School of Mechanical Engineering,Liaoning Technical University,Fuxin 123000,China |
|
|
|
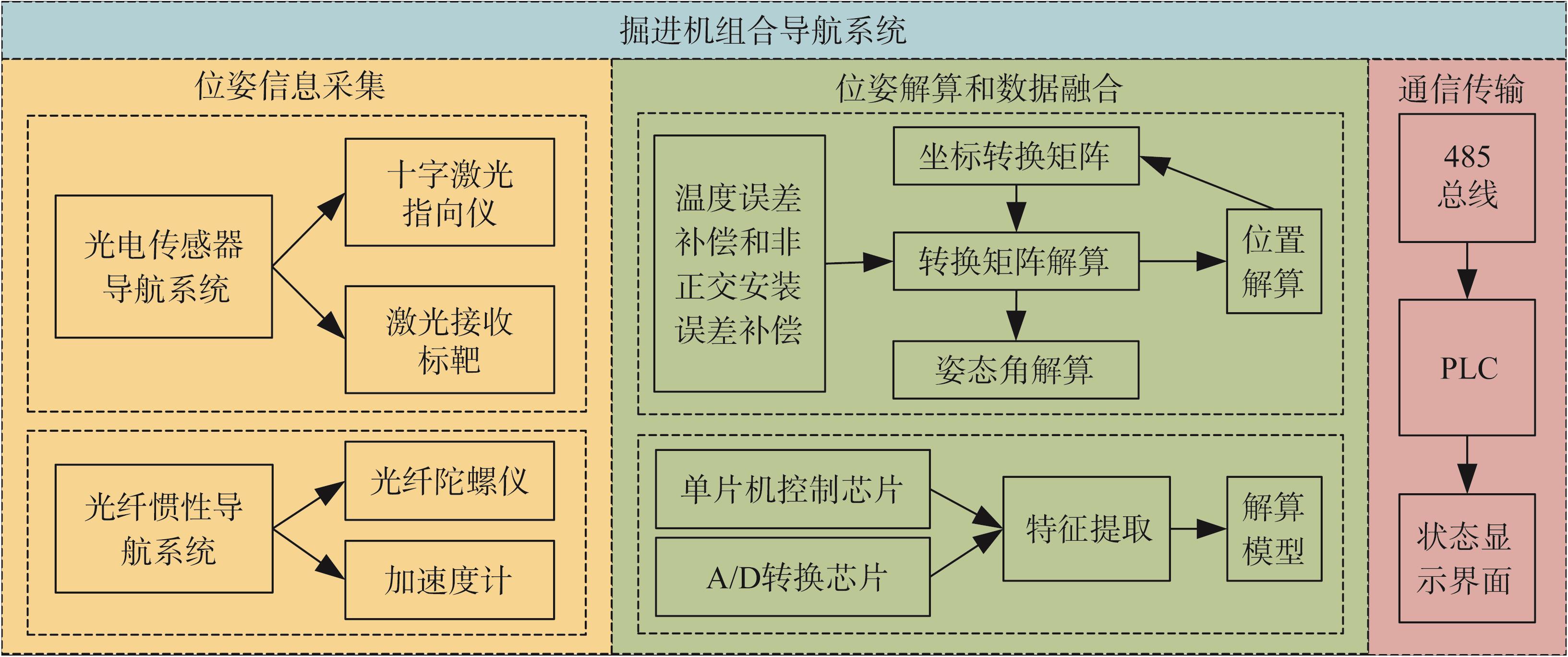
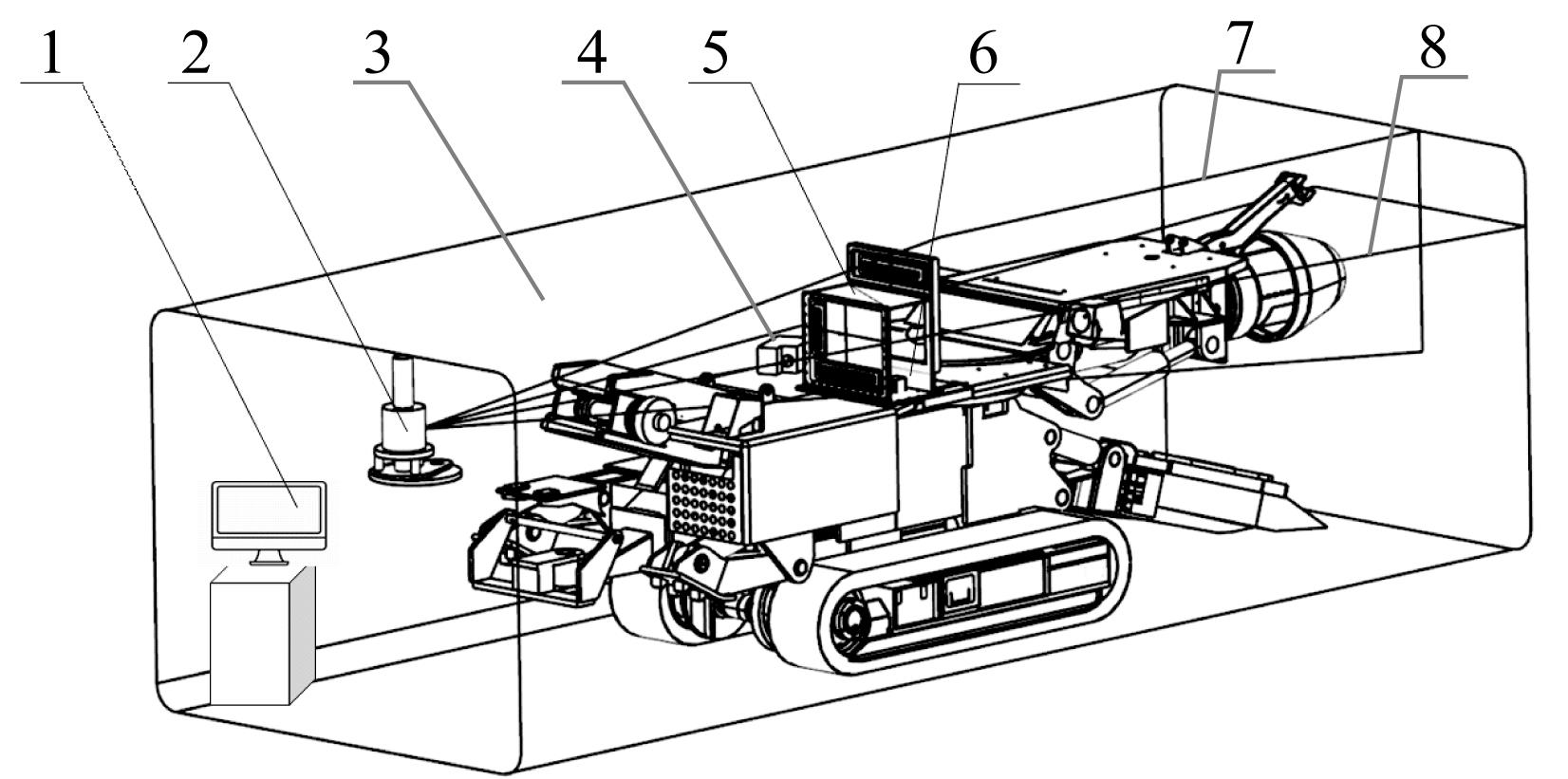
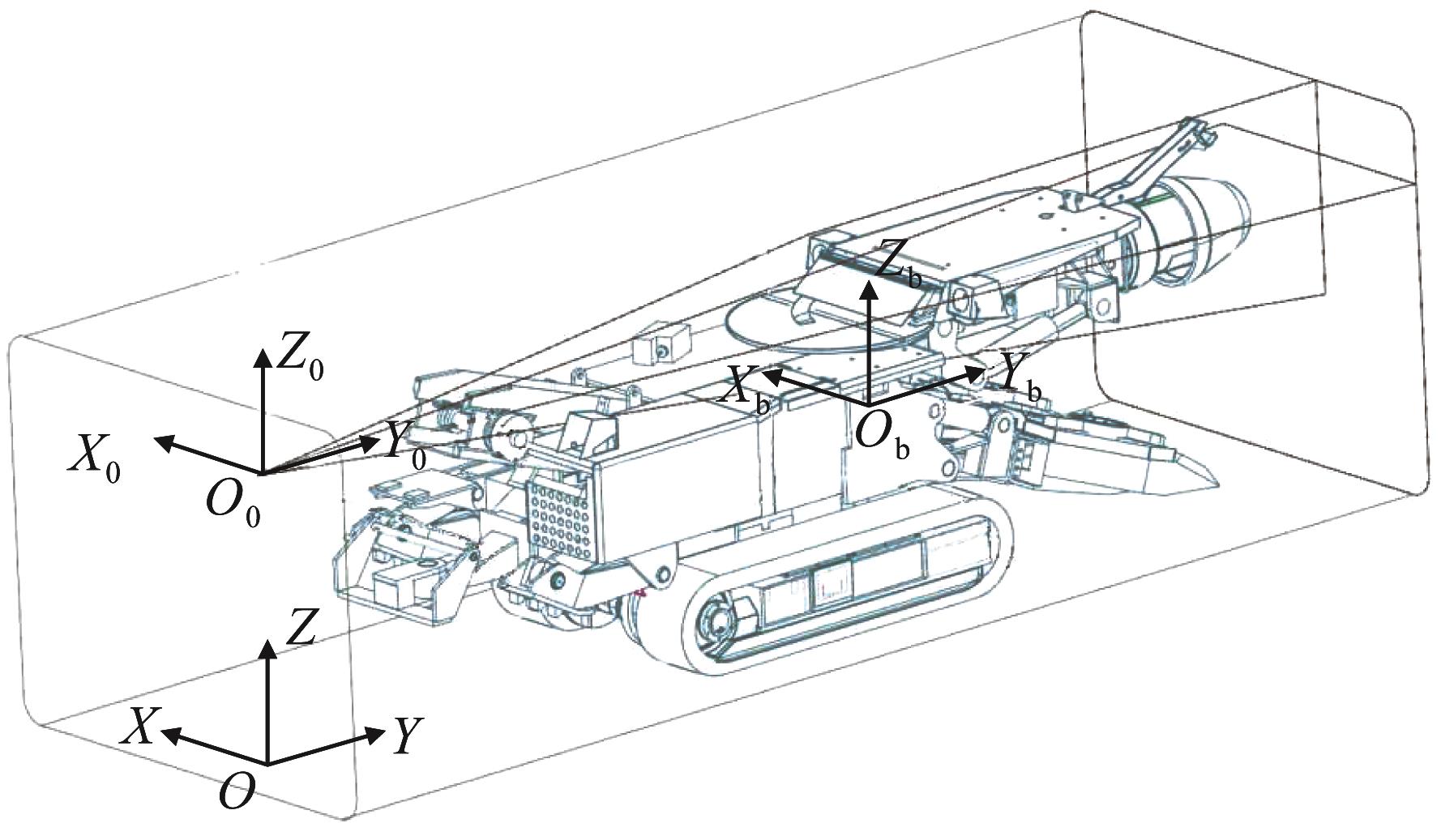
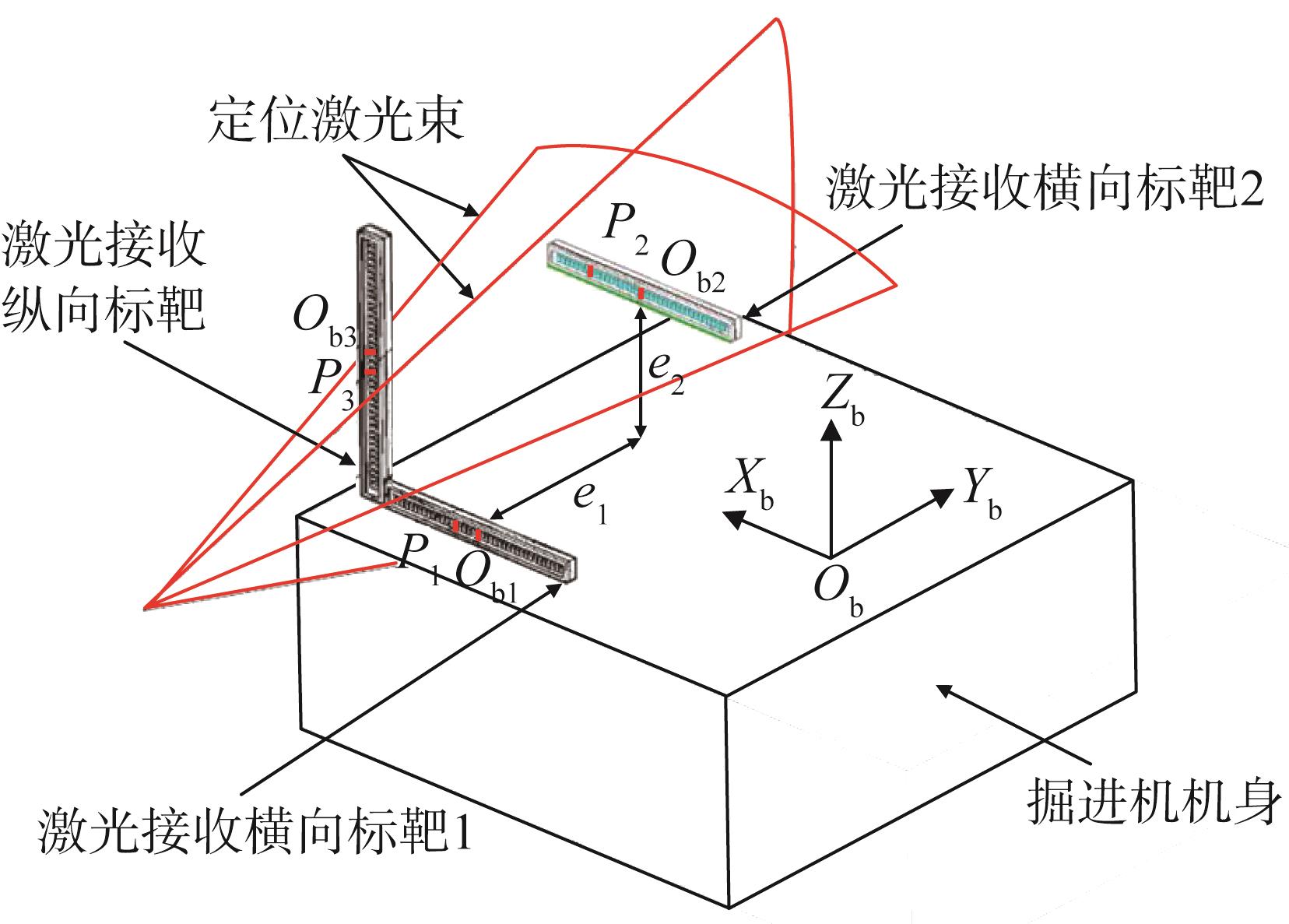
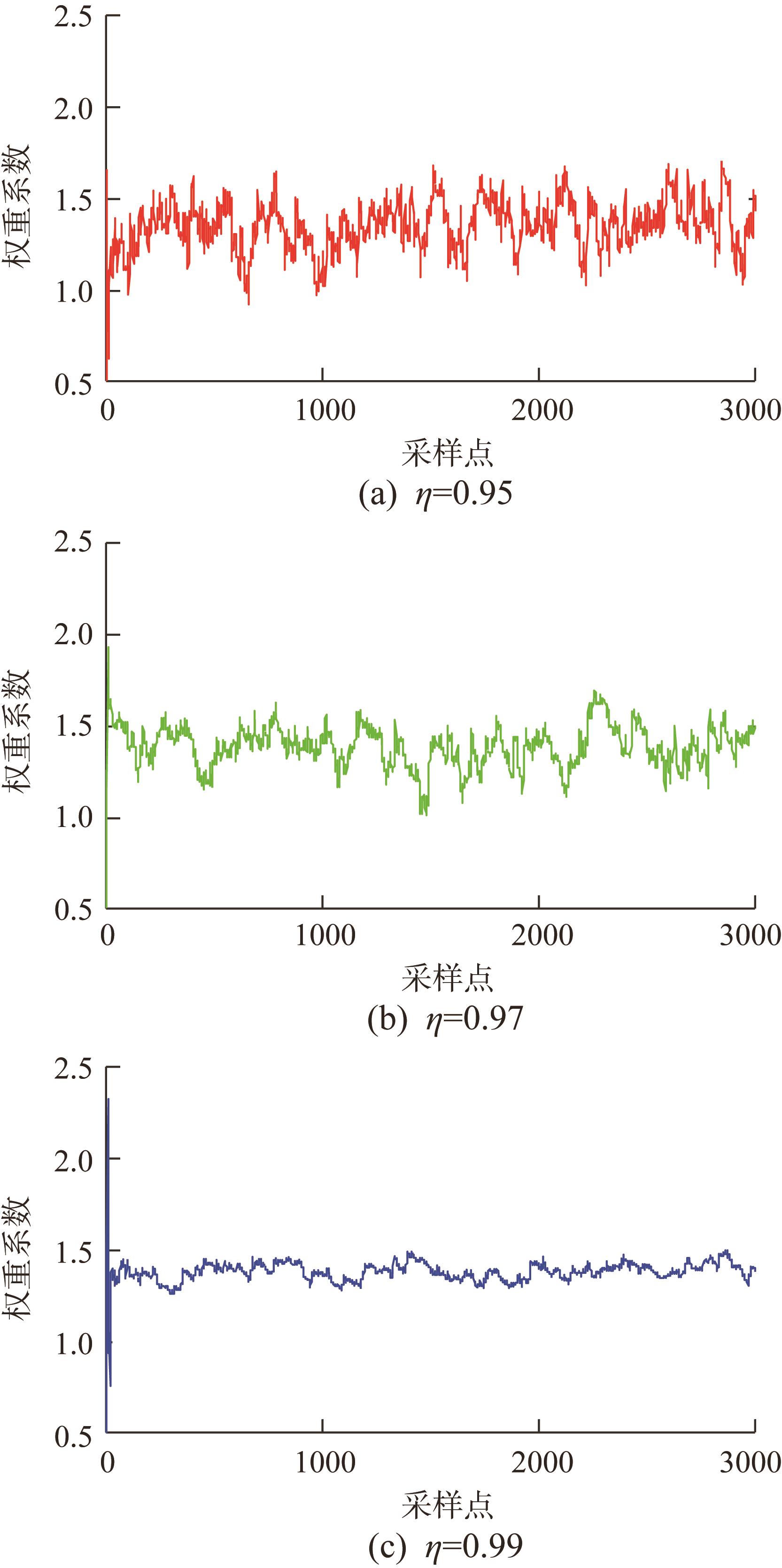
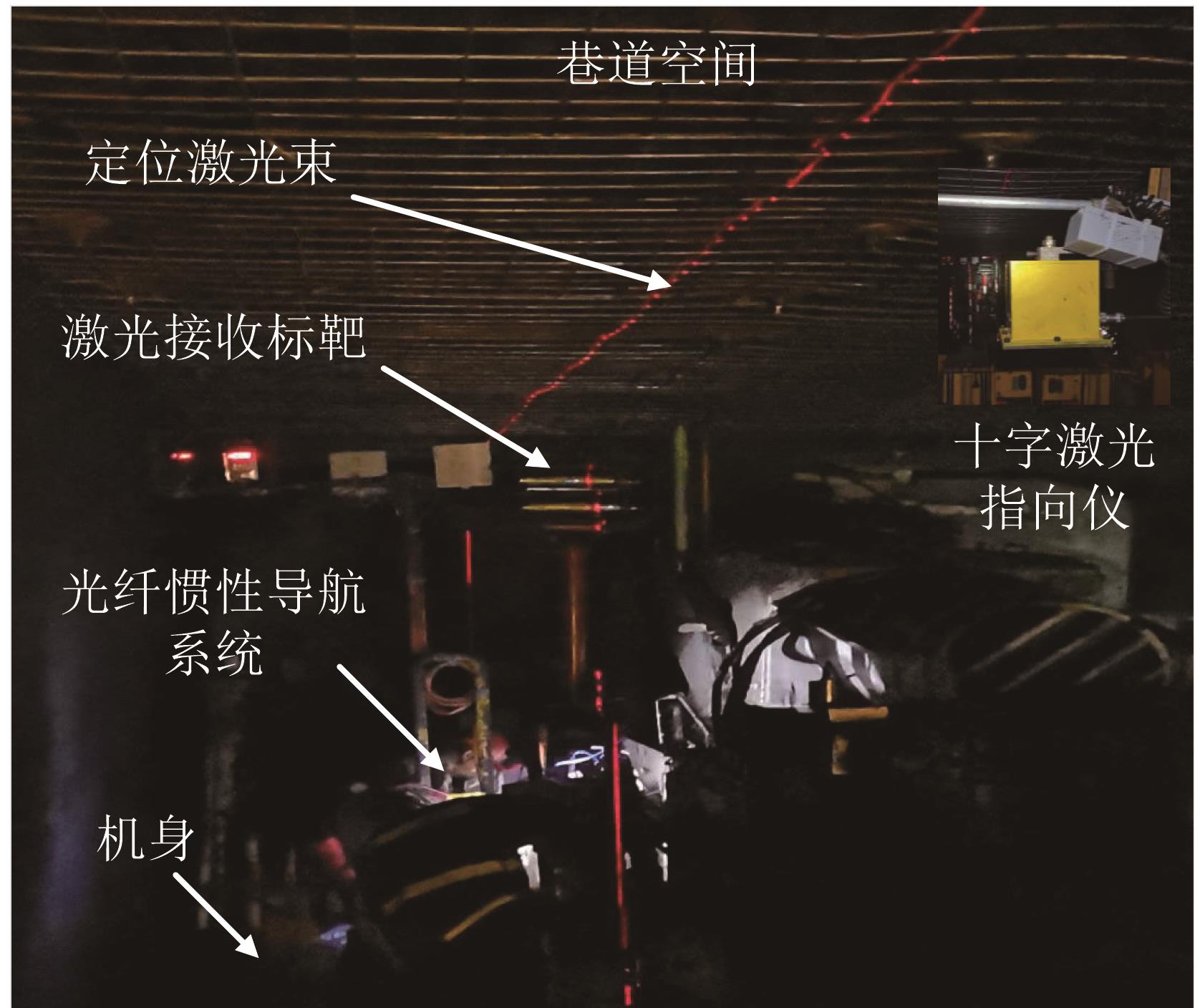
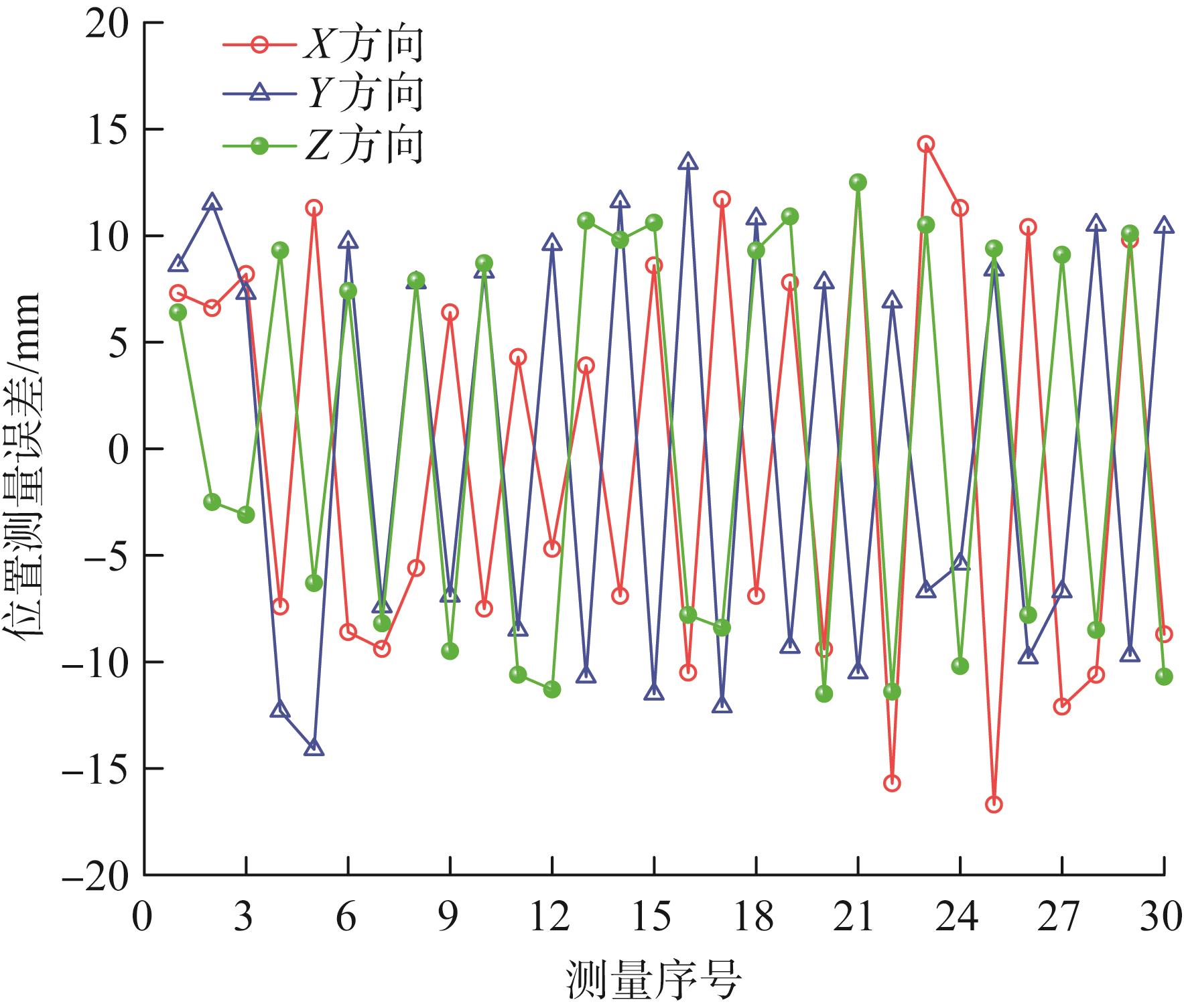
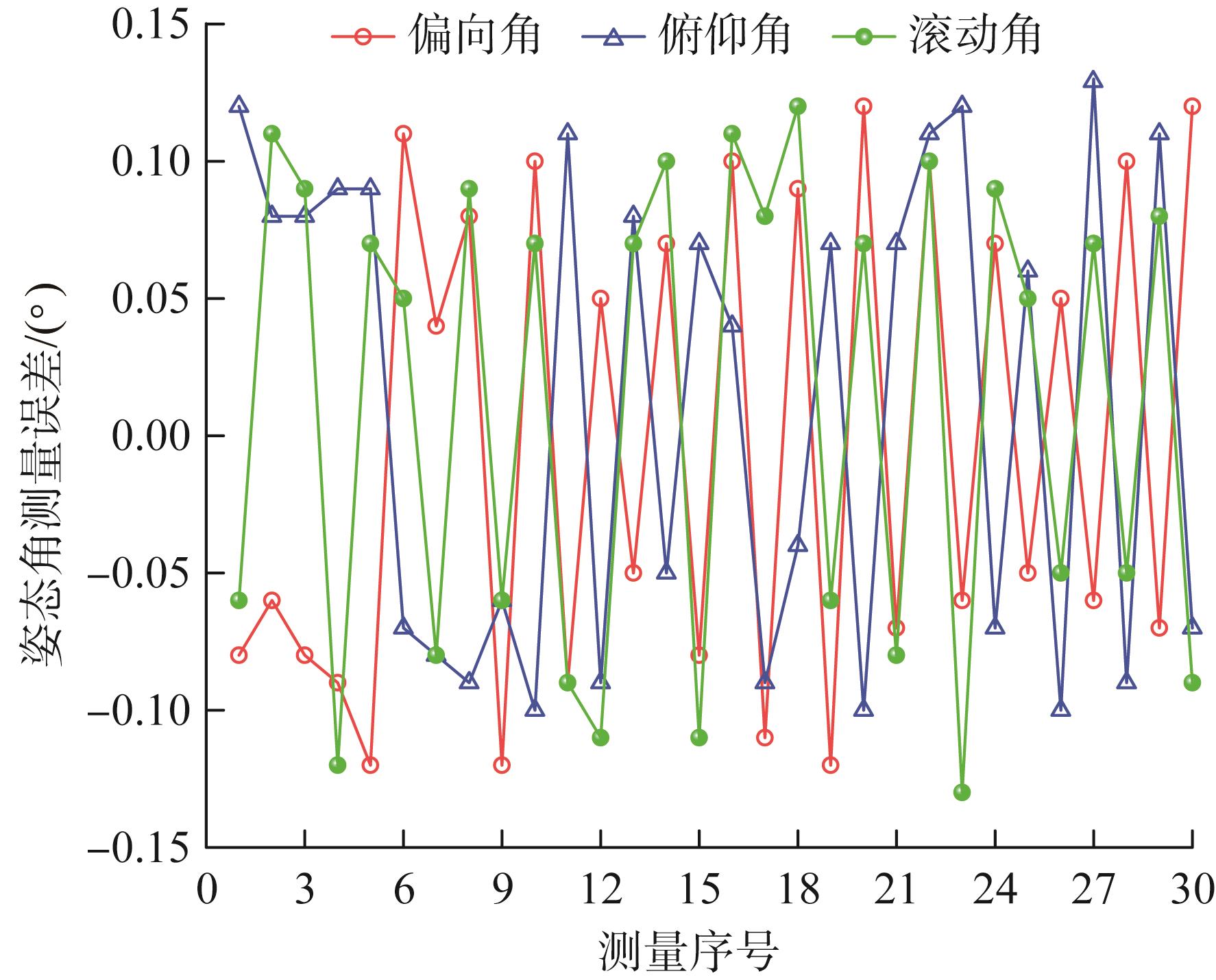
Abstract The step-by-step working characteristic of roadheader makes it difficult to realize directional tunneling, which has always been a technical problem at home and abroad. In order to realize the position and attitude measurement of coal mine roadheader, a navigation system of roadheader based on the combination mode (integrated navigation system) was proposed. Firstly, taking the laser beam of the cross laser pointer as the recognition feature, combined with the self-developed laser receiving target, the photoelectric sensor navigation system was set up, and the position and attitude calculation model of roadheader body was constructed; then, the measured data of the photoelectric sensor navigation system and the optical fiber inertial navigation system were fused by the recursive least square (RLS) algorithm to calculate the position and attitude of roadheader body; finally, according to the measurement results of the position and attitude of roadheader body, the deviation correction control for the roadheader was realized through the PLC (programmable logic controller), so as to effectively solve the problem of directional tunneling.Taking the MB670 anchor digging machine as the experimental object, the measurement error of the designed integrated navigation system was analyzed through field experiments.The results showed that the integrated navigation system could effectively measure the position and attitude of the coal mine roadheader body; the position measurement error of roadheader body was within ± 20 mm, and the attitude angle measurement error was within ± 0.15°, which met the requirements of coal mine roadway construction accuracy.The navigation system of roadheader based on the combination mode has the advantages of high precision and good reliability, which makes up for the measurement defects of the single navigation system, so it can provide a theoretical basis for the intelligent control of directional tunneling of roadheader.
|
|
Received: 12 April 2021
Published: 06 May 2022
|
|
|
基于组合方式的掘进机导航系统研究
掘进机时走时停的迈步式工作特点导致其难以实现定向掘进,这一直是国内外面临的技术难题。为实现煤矿巷道掘进机的位姿测量,提出一种基于组合方式的掘进机导航系统(即组合导航系统)。首先,以十字激光指向仪的激光束为识别特征,结合自主研制的激光接收标靶,组建光电传感器导航系统,并构建掘进机机身位姿解算模型;然后,通过递推最小二乘(recursive least square, RLS)算法将光电传感器导航系统和光纤惯性导航系统的测量数据融合,解算出掘进机机身的位姿;最后,根据掘进机机身位姿的测量结果,通过PLC (programmable logic controller,可编程逻辑控制器)实现掘进机的纠偏控制,以有效解决其定向掘进问题。以MB670型掘锚一体机为实验对象,通过现场实验对所设计的组合导航系统进行测量误差分析。结果表明:该组合导航系统可以有效实现煤矿巷道掘进机机身的位姿测量;掘进机机身的位置测量误差在±20 mm以内,姿态角测量误差在±0.15°以内,满足煤矿巷道施工精度要求。基于组合方式的掘进机导航系统具有精度高、可靠性好的优点,弥补了单一导航系统的测量缺陷,可为掘进机的定向掘进智能控制提供理论基础。
关键词:
掘进机,
光电传感器,
光纤惯性导航,
递推最小二乘(RLS)算法,
位姿测量
|
|
| [1] |
王国法,刘峰,孟祥军,等.煤矿智能化(初级阶段)研究与实践[J].煤炭科学技术,2019,47(8):1-36. doi:10.13199/j.cnki.cst.2019.08.001
WANG Guo-fa, LIU Feng, MENG Xiang-jun, et al. Research and practice on intelligent coal mine construction(primary stage)[J]. Coal Science and Technology, 2019, 47(8): 1-36.
doi: 10.13199/j.cnki.cst.2019.08.001
|
|
|
| [2] |
谢和平,王金华,王国法,等.煤炭革命新理念与煤炭科技发展构想[J].煤炭学报,2018,43(5):1187-1197. doi:10.13225/j.cnki.jccs.2018.0517
XIE He-ping, WANG Jin-hua, WANG Guo-fa, et al. New ideas of coal revolution and layout of coal science and technology development[J]. Journal of China Coal Society, 2018, 43(5): 1187-1197.
doi: 10.13225/j.cnki.jccs.2018.0517
|
|
|
| [3] |
王国法,杜毅博.智慧煤矿与智能化开采技术的发展方向[J].煤炭科学技术,2019,47(1):1-10. doi:10.13199/j.cnki.cst.2019.01.001
WANG Guo-fa, DU Yi-bo. Development direction of intelligent coal mine and intelligent mining technology [J]. Coal Science and Technology, 2019, 47(1): 1-10.
doi: 10.13199/j.cnki.cst.2019.01.001
|
|
|
| [4] |
王虹.我国综合机械化掘进技术发展40 a[J].煤炭学报,2010,35(11):1815-1820. doi:10.13225/j.cnki.jccs.2010.11.009
WANG Hong. The 40 years developmental review of the fully mechanized mine roadway heading technology in China[J]. Journal of China Coal Society, 2010, 35(11): 1815-1820.
doi: 10.13225/j.cnki.jccs.2010.11.009
|
|
|
| [5] |
张旭辉,赵建勋,杨文娟,等.悬臂式掘进机视觉导航与定向掘进控制技术[J].煤炭学报,2021,46(7):2186-2196. doi:10.13225/j.cnki.jccs.zn20.0357
ZHANG Xu-hui, ZHAO Jian-xun, YANG Wen-juan, et al. Vision-based navigation and directional heading control technologies of boom-type roadheader[J]. Journal of China Coal Society, 2021, 46(7): 2186-2196.
doi: 10.13225/j.cnki.jccs.zn20.0357
|
|
|
| [6] |
朱信平,李睿,高娟,等.基于全站仪的掘进机机身位姿参数测量方法[J].煤炭工程,2011(6):113-115. doi:10.3969/j.issn.1671-0959.2011.06.044
ZHU Xin-ping, LI Rui, GAO Juan, et al. The measurement method of body pose parameters of roadheader based on total station[J]. Coal Engineering, 2011(6): 113-115.
doi: 10.3969/j.issn.1671-0959.2011.06.044
|
|
|
| [7] |
杨文娟,张旭辉,马宏伟,等.悬臂式掘进机机身及截割头位姿视觉测量系统研究[J].煤炭科学技术,2019,47(6):50-57. doi:10.13199/j.cnki.cst.2019.06.008
YANG Wen-juan, ZHANG Xu-hui, MA Hong-wei, et al. Research on position and posture measurement system of body and cutting head for boom-type roadheader based on machine vision[J]. Coal Science and Technology, 2019, 47(6): 50-57.
doi: 10.13199/j.cnki.cst.2019.06.008
|
|
|
| [8] |
杜雨馨,刘停,童敏明,等.基于机器视觉的悬臂式掘进机机身位姿检测系统[J].煤炭学报,2016,41(11):2897-2906. doi:10.13225/j.cnki.jccs.2016.0397
DU Yu-xin, LIU Ting, TONG Min-ming, et al. Pose measurement system of boom-type roadheader based on machine vision[J]. Journal of China Coal Society, 2016, 41(11): 2897-2906.
doi: 10.13225/j.cnki.jccs.2016.0397
|
|
|
| [9] |
吴淼,贾文浩,华伟,等.基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法[J].煤炭学报,2015,40(11):2596-2602. doi:10.13225/j.cnki.jccs.2015.7065
WU Miao, JIA Wen-hao, HUA Wei, et al. Autonomous measurement of position and attitude of boom-type roadheader based on space intersection measurement[J]. Journal of China Coal Society, 2015, 40(11): 2596-2602.
doi: 10.13225/j.cnki.jccs.2015.7065
|
|
|
| [10] |
张旭辉,赵建勋,张超,等.悬臂式掘进机视觉伺服截割控制系统研究[J].煤炭科学技术,2022,50(2):263-270. doi:10.13199/j.cnki.cst.2019-0628
ZHANG Xu-hui, ZHAO Jian-xun, ZHANG Chao, et al. Visual servo control system for cutting of boom-type roadheader[J]. Coal Science and Technology, 2022, 50(2): 263-270.
doi: 10.13199/j.cnki.cst.2019-0628
|
|
|
| [11] |
毛清华,张旭辉,马宏伟,等.多传感器信息的悬臂式掘进机空间位姿监测系统研究[J].煤炭科学技术,2018,46(12):41-47. doi:10.13199/j.cnki.cst.2018.12.007
MAO Qing-hua, ZHANG Xu-hui, MA Hong-wei, et al. Study on spatial position and posture monitoring system of boom-type roadheader based on multi sensor information[J]. Coal Science and Technology, 2018, 46(12): 41-47.
doi: 10.13199/j.cnki.cst.2018.12.007
|
|
|
| [12] |
HARGRAVE C O, JAMES C A, RALSTON J C. Infrastructure-based localisation of automated coal mining equipment[J]. International Journal of Coal Science & Technology, 2017, 4(3): 252-261. doi:10.1007/s40789-017-0180-3
doi: 10.1007/s40789-017-0180-3
|
|
|
| [13] |
李磊,肖世德,李兴坤,等.多传感器融合的智能车定位导航系统设计[J].工程设计学报,2019,26(2):182-189. doi:10.3785/j.issn.1006-754X.2019.02.009
LI Lei, XIAO Shi-de, LI Xing-kun, et al. Design of intelligent vehicle positioning navigation system with multi-sensor fusion[J]. Chinese Journal of Engineering Design, 2019, 26(2): 182-189.
doi: 10.3785/j.issn.1006-754X.2019.02.009
|
|
|
| [14] |
张博雅.多源辅助惯性导航系统算法研究[D].南京:南京理工大学,2019:10-12.
ZHANG Bo-ya. Algorithm research on multi-source aided inertial navigation system[D]. Nanjing: Nanjing University of Science and Technology, 2019: 10-12.
|
|
|
| [15] |
郭庆尧.激光标靶与捷联惯性导航系统组合位姿测量关键技术研究[D].天津:天津大学,2017:13-15.
GUO Qing-yao. Research on key technologies of the pose combination measurement system based on laser target and strapdown inertial navigation[D]. Tianjin: Tianjin University, 2017: 13-15.
|
|
|
| [16] |
张璞.煤矿井下移动机器人自主定位方法研究[D].西安:西安科技大学,2019:30-32.
ZHANG Pu. Research on autonomous positioning of coal mine mobile robot[D]. Xi’an: Xi’an University of Science and Technology, 2019: 30-32.
|
|
|
| [17] |
田粮川.基于捷联惯导的消防员运动位置检测研究[D].保定:河北大学,2018:30-31.
TIAN Liang-chuan. Research on location detection of firefighters based on strapdown inertial navigation[D]. Baoding: Hebei University, 2018: 30-31.
|
|
|
| [18] |
刘可.基于阵列天线的自适应波束形成算法研究[D].哈尔滨:哈尔滨工程大学,2018:22-25.
LIU Ke. Research on array antenna-based adaptive beamforming algorithm[D]. Harbin: Harbin Engineering University, 2018: 22-25.
|
|
|
| [19] |
余修武,范飞生,周利兴,等.无线传感器网络自适应预测加权数据融合算法[J].传感技术学报,2017,30(5):772-776. doi:10.3969/j.issn.1004-1699.2017.05.023
YU Xiu-wu, FAN Fei-sheng, ZHOU Li-xing, et al. Adaptive forecast weighting data fusion algorithm for wireless sensor network[J]. Chinese Journal of Sensors and Actuators, 2017, 30(5): 772-776.
doi: 10.3969/j.issn.1004-1699.2017.05.023
|
|
|
| [20] |
刘昊,陈光武,魏宗寿,等.改进的最小二乘自适应滤波陀螺仪去噪方法[J].仪器仪表学报,2018,39(4):107-114. doi:10.19650/j.cnki.cjsi.J1702823
LIU Hao, CHEN Guang-wu, WEI Zong-shou, et al. Gyro denoising method based on least squares adaptive filter[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 107-114.
doi: 10.19650/j.cnki.cjsi.J1702823
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|