| Robotic and Mechanism Design |
|


|
|
|
| Design and analysis of flexible decoupling mechanism for rotational nano-motion |
Rui MU( ),Leijie LAI() ),Leijie LAI() |
| School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China |
|
|
|
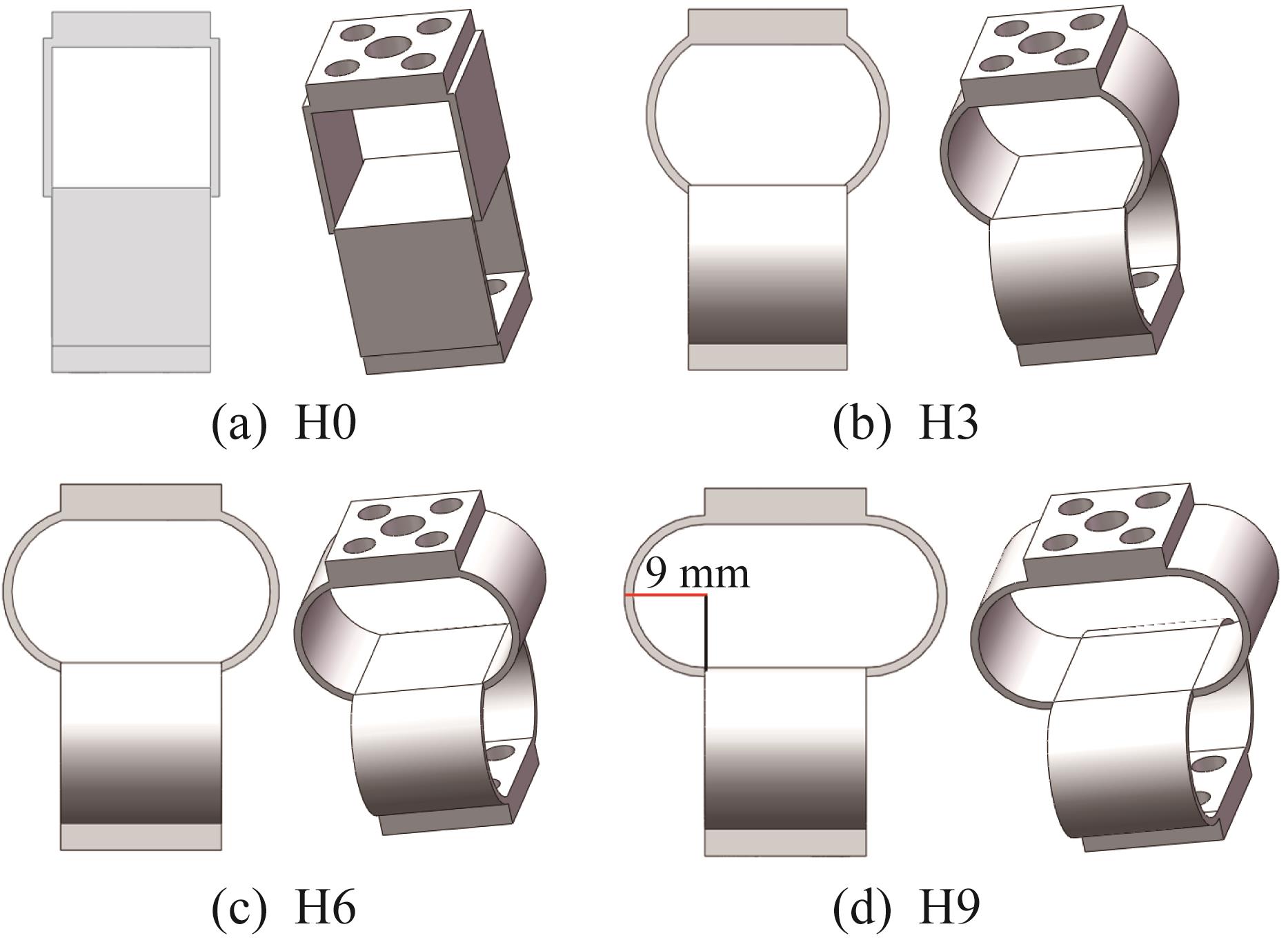
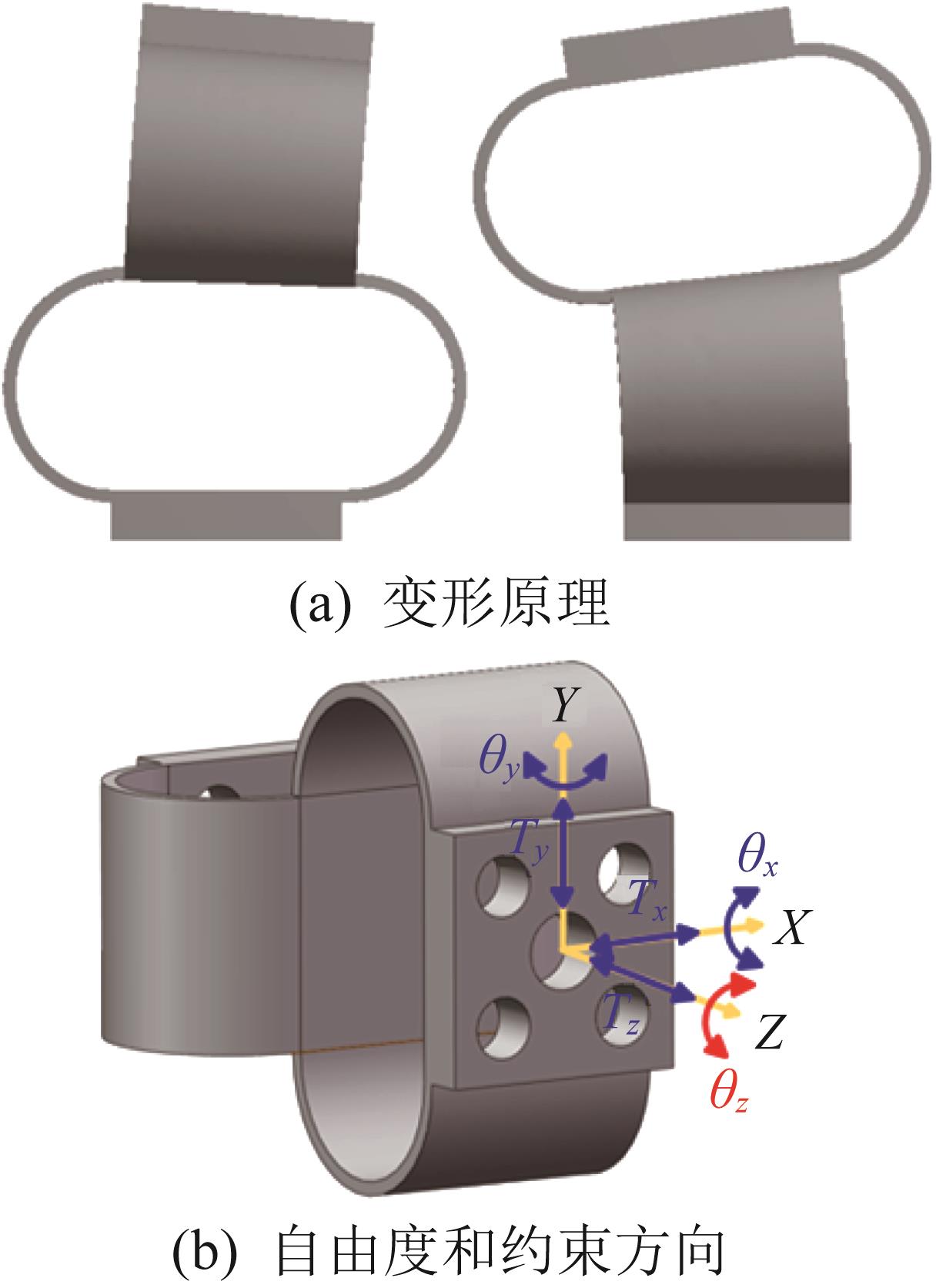
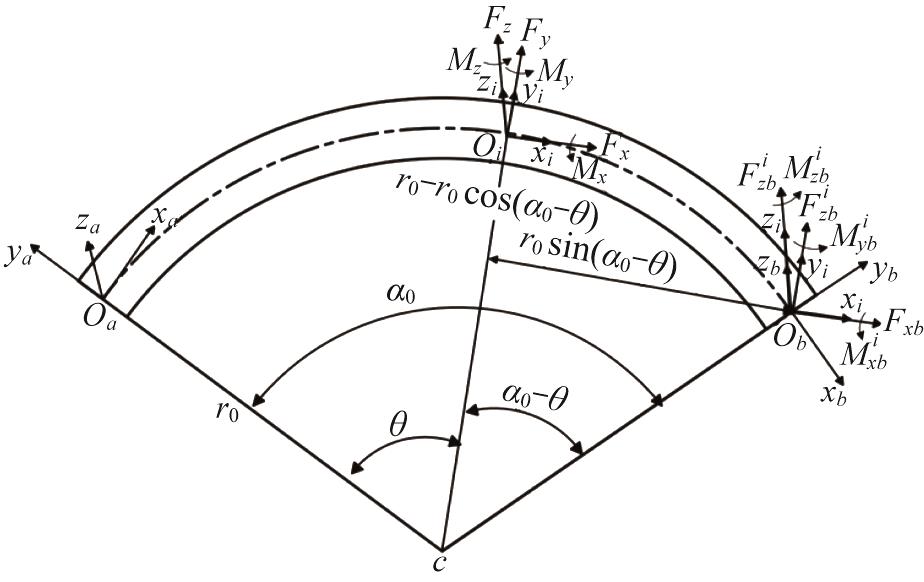
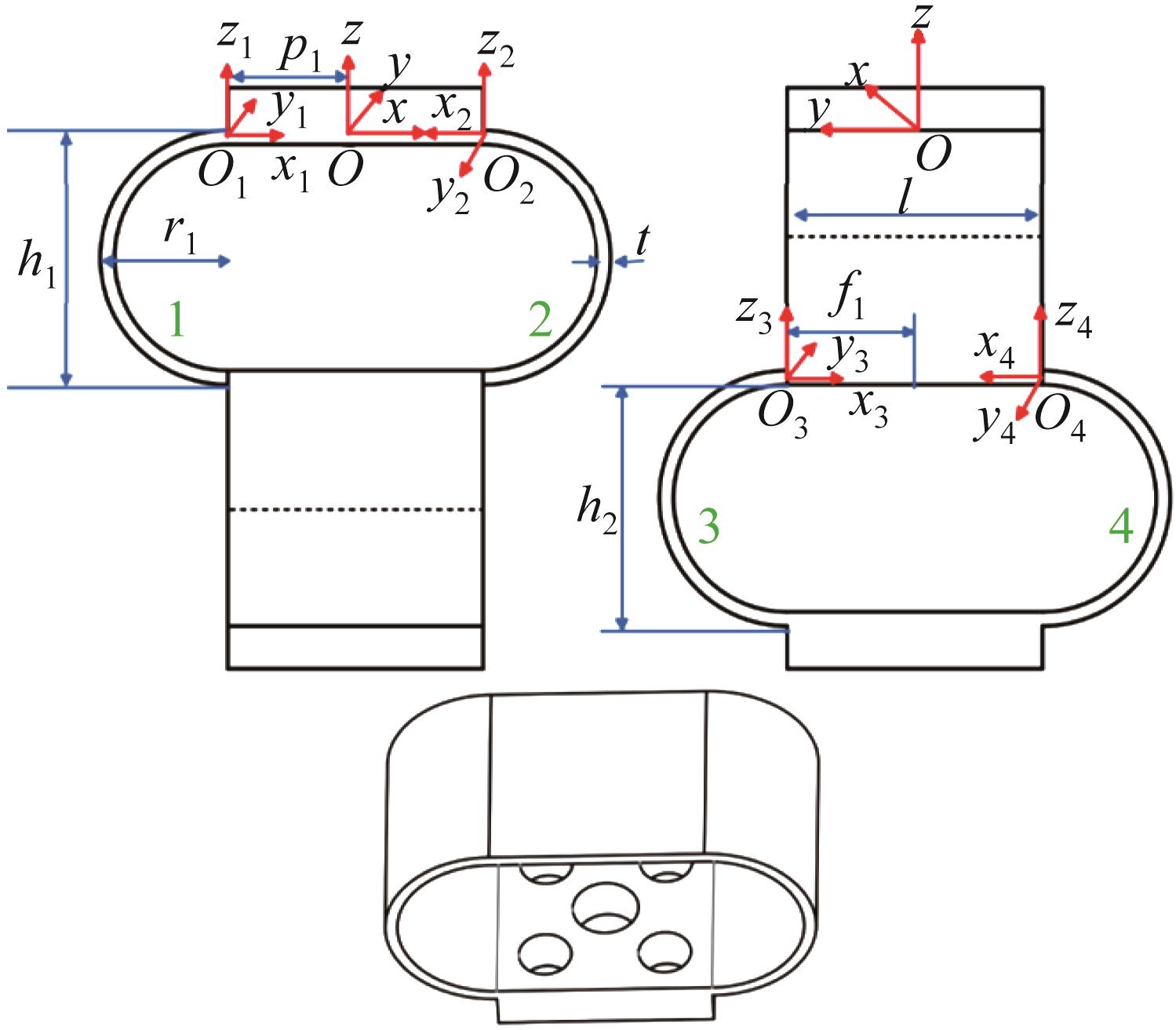
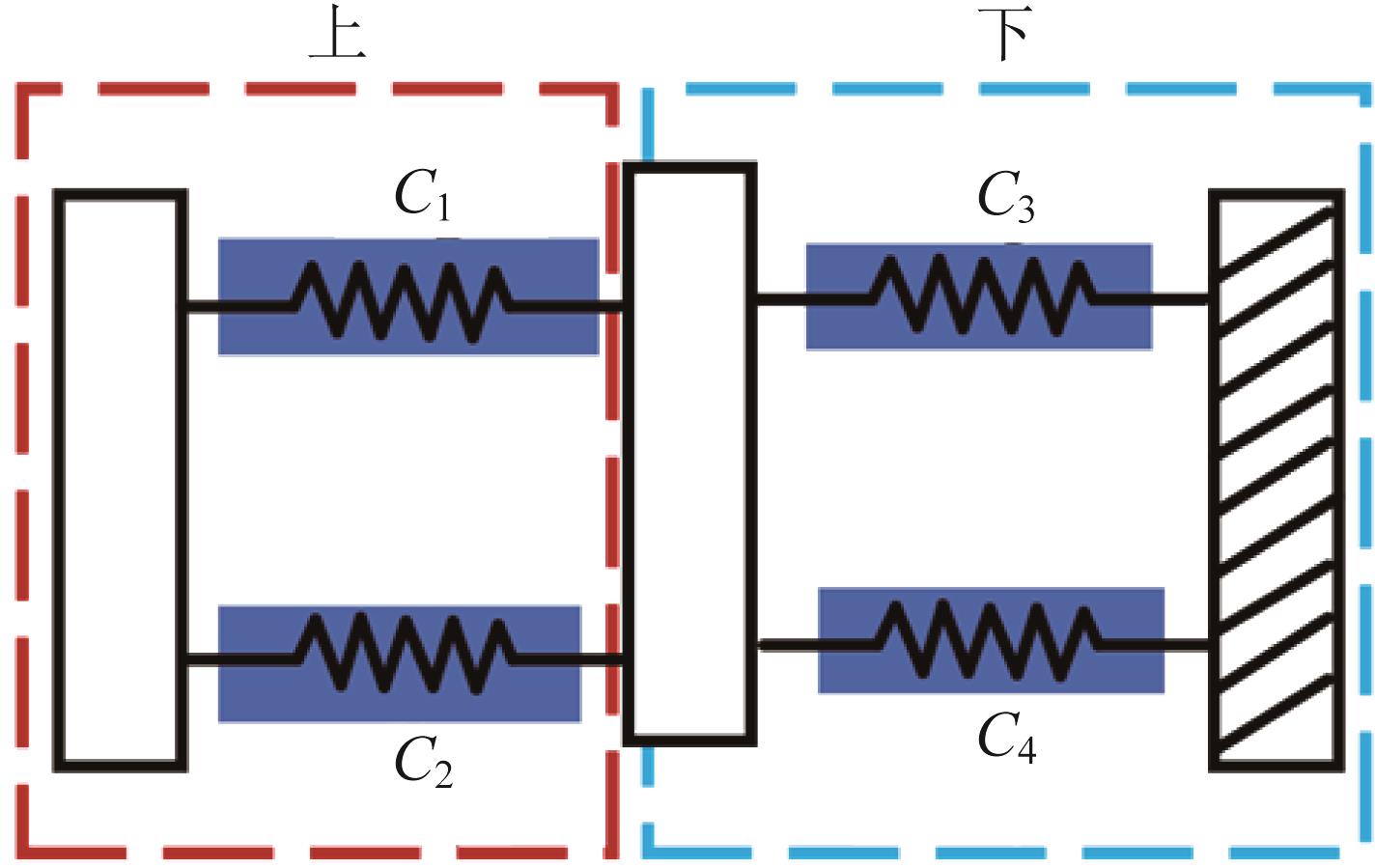
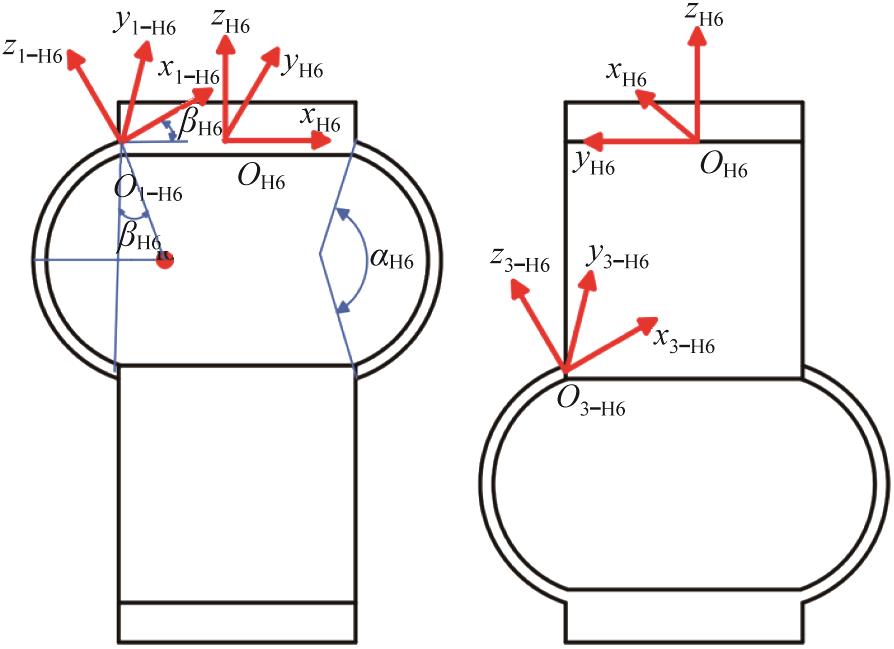
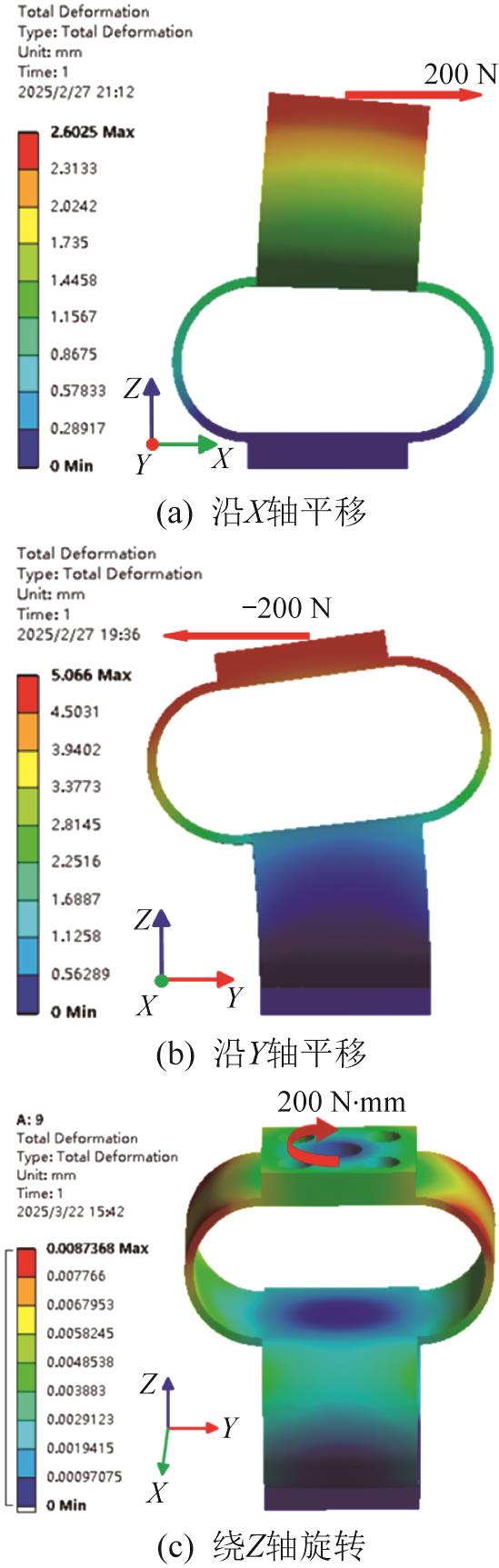
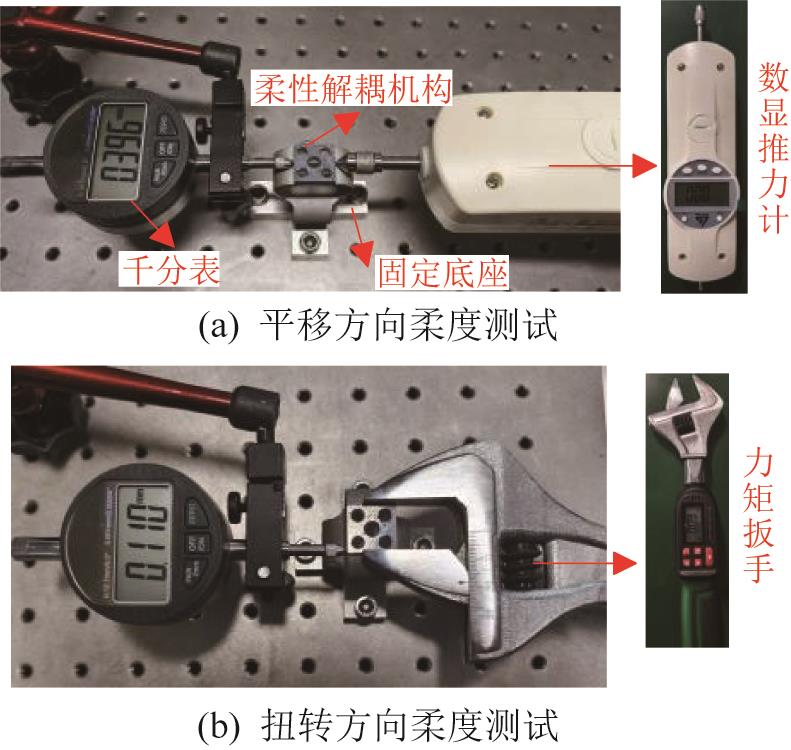
Abstract Aiming at the problem that parallel flexible mechanisms applied in micro/nano-positioning fields struggle to decouple rotational motion from other degrees of freedom to form independent actuation units, the rotational motion decoupling mechanism based on orthogonal arrangements of reed-beam parallelogram mechanisms is extended. By replacing reed beams with arc beams, a series of flexible rotational nano-motion decoupling mechanisms based on arc beams are designed, and their compliance modeling and performance testing are conducted. Firstly, the configurations of flexible decoupling mechanisms with different arc beam heights were introduced. Each mechanism was composed of two identical orthogonal upper and lower parts, which fully utilized the compliance characteristics of arc beams in various degrees of freedom, enabling decoupling among multiple coupled degrees of freedom, including translational motions. Then, theoretical modeling of the flexible decoupling mechanisms was performed based on the compliance matrix method to determine their dimensional parameters and derive their output compliance. Finally, the accuracy of the theoretical compliance models was validated by combining finite element analysis with experiments, and the decoupling capabilities of different mechanisms were compared. The results showed that the relative errors between the finite element analysis and experimental results and the theoretical calculation results of each flexible decoupling mechanism's compliance were within 10%, and its decoupling performance was positively correlated with the height of arc beams on both sides. This type of flexible decoupling mechanism can be applied to the flexible mechanism design for multi-degree-of-freedom parallel micro/nano-positioning platforms, which has certain practical value.
|
|
Received: 03 April 2025
Published: 30 December 2025
|
|
|
|
Corresponding Authors:
Leijie LAI
E-mail: mur3721@163.com;lailj@sues.edu.cn
|
旋转纳米运动柔性解耦机构的设计与分析
针对应用于微纳米定位领域的并联柔性机构存在旋转运动难以与其他自由度实现解耦以形成独立驱动单元的问题,以由簧片梁式平行四边形机构正交组合而成的旋转运动解耦机构为基础,对其进行扩展,将簧片梁替换为圆弧梁,设计了一系列基于圆弧梁的旋转纳米运动柔性解耦机构,并对其进行柔度建模与性能测试。首先,介绍了圆弧梁高度不同的柔性解耦机构构型,其由完全相同的上下两部分正交构成,通过充分利用圆弧梁在各自由度方向上的柔度特性,以实现对包含平动在内的多个耦合自由度的解耦。然后,基于柔度矩阵法对柔性解耦机构进行理论建模,确定各机构的尺寸参数并得到其输出柔度。最后,通过有限元分析和实验相结合的方法对柔度理论模型的准确性进行了验证,并比较了不同柔性解耦机构的解耦能力。结果表明:各柔性解耦机构柔度的有限元分析和实验结果与理论计算结果的相对误差均在10%以内,且其解耦性能与两侧圆弧梁的高度成正比关系。这类柔性解耦机构可应用于多自由度并联微纳米定位平台的柔性机构设计,具有一定实用价值。
关键词:
旋转运动,
柔性解耦机构,
柔度矩阵法,
圆弧梁,
有限元分析
|
|
| [[1]] |
王陈, 孟宪昱, 于瀛洁, 等. 三维微纳米台阶高精度光学显微测量量化表征[J]. 光学 精密工程, 2022, 30(6): 651-658. doi:10.37188/OPE.20223006.0651
WANG C, MENG X Y, YU Y J, et al. High-accuracy characterization of areal micro-nano steps measured with optical microscopes[J]. Optics and Precision Engineering, 2022, 30(6): 651-658.
doi: 10.37188/OPE.20223006.0651
|
|
|
| [[2]] |
XIAO R J, XU M L, SHAO S B, et al. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit[J]. Mechanical Systems and Signal Processing, 2019, 126: 211-226.
|
|
|
| [[3]] |
刘昊, 赖磊捷. 大行程推拉电磁驱动微定位平台的内环阻尼与迭代学习控制[J]. 机械科学与技术, 2024, 43(7): 1238-1243.
LIU H, LAI L J. Inner loop damping and iterative learning control of a large stroke micro-positioning stage driven by push-pull electromagnetic actuators[J]. Mechanical Science and Technology for Aerospace Engineering, 2024, 43(7): 1238-1243.
|
|
|
| [[4]] |
TEO T J, YANG G L, CHEN I M. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part I. modeling and analyses[J]. Precision Engineering, 2014, 38(4): 861-871.
|
|
|
| [[5]] |
张旭, 赖磊捷, 李朋志, 等. 电磁驱动柔顺微定位平台闭环频域逆迭代学习控制[J]. 光学 精密工程, 2021, 29(9): 2149-2157. doi:10.37188/OPE.20212909.2149
ZHANG X, LAI L J, LI P Z, et al. Closed-loop inverse iterative learning control in frequency-domain for electromagnetic driven compliant micro-positioning platform[J]. Optics and Precision Engineering, 2021, 29(9): 2149-2157.
doi: 10.37188/OPE.20212909.2149
|
|
|
| [[6]] |
吴俊杰, 李源. 基于纳米测量机的微结构三维坐标测量[J]. 光学 精密工程, 2020, 28(10): 2252-2259. doi:10.37188/ope.20202810.2252
WU J J, LI Y. Three-dimensional coordinate measurement of microstructures based on nano measuring machine[J]. Optics and Precision Engineering, 2020, 28(10): 2252-2259.
doi: 10.37188/ope.20202810.2252
|
|
|
| [[7]] |
WANG P Y, XU Q S. Design of a flexure-based constant-force XY precision positioning stage[J]. Mechanism and Machine Theory, 2017, 108: 1-13.
|
|
|
| [[8]] |
SHEN X, ZHANG L, QIU D M. A lever-bridge combined compliant mechanism for translation amplification[J]. Precision Engineering, 2021, 67: 383-392.
|
|
|
| [[9]] |
KANG S, LEE M G, CHOI Y M. Six degrees-of-freedom direct-driven nanopositioning stage using crab-leg flexures[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(2): 513-525.
|
|
|
| [[10]] |
YANG Z D, LEE R, HOPKINS J B. Hexblade positioner: a fast large-range six-axis motion stage[J]. Precision Engineering, 2022, 76: 199-207.
|
|
|
| [[11]] |
陈云壮, 赖磊捷, 李朋志, 等. 全簧片式空间大行程并联柔性微定位平台及其轨迹控制[J]. 光学 精密工程, 2023, 31(18): 2675-2686. doi:10.37188/ope.20233118.2675
CHEN Y Z, LAI L J, LI P Z, et al. Full leaf-spring type spatial large-stroke parallel flexure micro-positioning stage and trajectory control[J]. Optics and Precision Engineering, 2023, 31(18): 2675-2686.
doi: 10.37188/ope.20233118.2675
|
|
|
| [[12]] |
LAI L J, GU G Y, ZHU L M. Design and control of a decoupled two degree of freedom translational parallel micro-positioning stage[J]. Review of Scientific Instruments, 2012, 83(4): 045105.
|
|
|
| [[13]] |
WU H T, LAI L J, ZHANG L Q, et al. A novel compliant XY micro-positioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism[J]. Precision Engineering, 2022, 73: 284-295.
|
|
|
| [[14]] |
XU Q S. Design and development of a compact flexure-based XY precision positioning system with centimeter range[J]. IEEE Transactions on Industrial Electronics, 2014, 61(2): 893-903.
|
|
|
| [[15]] |
LU S S, YAN P, ZHANG B. Long stroke displacement measurement with reduced coupling error supporting high precision control of a beam flexure-based micro-stage[J]. Review of Scientific Instruments, 2020, 91(7): 073701.
|
|
|
| [[16]] |
YU H T, ZHANG C, YANG B, et al. The design and kinetostatic modeling of 3PPR planar compliant parallel mechanism based on compliance matrix method[J]. Review of Scientific Instruments, 2019, 90(4): 045102.
|
|
|
| [[17]] |
YANG M, SUN M Y, WU Z, et al. Design of a redundant actuated 4-PPR planar 3-DOF compliant nanopositioning stage[J]. Precision Engineering, 2023, 82: 68-79.
|
|
|
| [[18]] |
LI H Y, LIU Y J, WANG Z P, et al. A constraint-flow based method of synthesizing XYθ compliant parallel mechanisms with decoupled motion and actuation characteristics[J]. Mechanism and Machine Theory, 2022, 178: 105085.
|
|
|
| [[19]] |
AL-JODAH A, SHIRINZADEH B, GHAFARIAN M, et al. Design, modeling, and control of a large range 3-DOF micropositioning stage[J]. Mechanism and Machine Theory, 2021, 156: 104159.
|
|
|
| [[20]] |
谢超, 陈云壮, 石光楠, 等. 正交簧片型大行程柔性球铰设计及柔度分析[J]. 工程设计学报, 2023, 30(5): 626-633.
XIE C, CHEN Y Z, SHI G N, et al. Design and compliance analysis of large stroke flexible ball hinge with orthogonal reeds[J]. Chinese Journal of Engineering Design, 2023, 30(5): 626-633.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|