| 产品创新设计 |
|


|
|
|
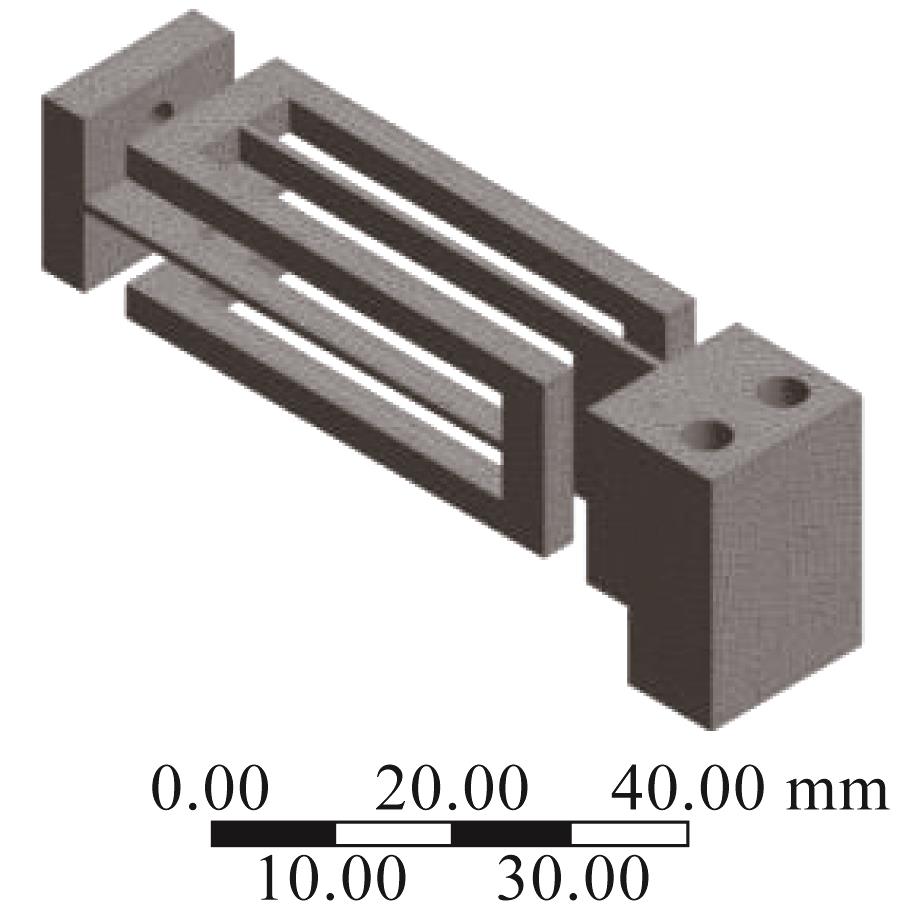
| 正交簧片型大行程柔性球铰设计及柔度分析 |
谢超( ),陈云壮,石光楠,赖磊捷() ),陈云壮,石光楠,赖磊捷() |
| 上海工程技术大学 机械与汽车工程学院,上海 201620 |
|
| Design and compliance analysis of large stroke flexible ball hinge with orthogonal reeds |
| Chao XIE(),Yunzhuang CHEN,Guangnan SHI,Leijie LAI() |
| School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China |
引用本文:
谢超,陈云壮,石光楠,赖磊捷. 正交簧片型大行程柔性球铰设计及柔度分析[J]. 工程设计学报, 2023, 30(5): 626-633.
Chao XIE,Yunzhuang CHEN,Guangnan SHI,Leijie LAI. Design and compliance analysis of large stroke flexible ball hinge with orthogonal reeds[J]. Chinese Journal of Engineering Design, 2023, 30(5): 626-633.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2023.00.069
或
https://www.zjujournals.com/gcsjxb/CN/Y2023/V30/I5/626
|
| 1 |
姜玉涛,张银.双轴椭圆切口型柔性球铰柔度建模及分析[J].自动化与仪器仪表,2022(2):33-42.
JIANG Y T, ZHANG Y. Compliance modeling and analysing of double-axis elliptical are flexure hinge[J]. Automation and Instrumentation, 2022 (2): 33-42.
|
| 2 |
SETO W, SITTI M. Tank-like module-based climbing robot using passive complaint joints[J]. IEEE/ASME Transaction on Mechatronics, 2013, 18(1): 397-408.
|
| 3 |
曹毅,王保兴,孟刚,等. 大行程三平动柔性微定位平台的设计分析及优化[J].机械工程学报,2020,56(17):71-81. doi:10.3901/jme.2020.17.071
CAO Y, WANG B X, MENG G, et al. Design analysis and optimization of large range spatial translational compliant micro-positioning stage[J]. Journal of Mechanical Engineering, 2020, 56(17): 71-81.
doi: 10.3901/jme.2020.17.071
|
| 4 |
李立建,马爱霞,姚建涛,等. 柔性并联六维力传感器力映射解析研究[J].机械工程学报,2017,53(7):30-38. doi:10.3901/jme.2017.07.030
LI L J, MA A X, YAO J T, et al. Force mapping analytical research of flexible parallel six-axis force/torque sensor[J]. Journal of Mechanical Engineering, 2017, 53(7): 30-38.
doi: 10.3901/jme.2017.07.030
|
| 5 |
ZHENG Y L, YONG S I, CHOI H R, et al. An automated focusing method for a parallel micro-manipulator alignment[J]. Microsystem Technologies, 2016, 22(6): 1501-1509.
|
| 6 |
SINNO A, RUAUX P, CHASSAGNE L, et al. Enlarged atomic force microscopy scanning scope: Novel sample-holder device with millimeter range[J]. Review of Scientific Instruments, 2007, 78(9): 095107-095117.
|
| 7 |
LAN H, DING Y, LIU L, et al. Review of the wafer stage for nanoimprint lithography[J]. Microelectronic Engineering, 2007, 84 (4): 684-688.
|
| 8 |
于靖军,郝广波,陈贵敏,等. 柔性机构及其应用研究进展[J].机械工程学报,2015,51(13):53-68. doi:10.3901/jme.2015.13.053
YU J J, HAO G B, CHEN G M, et al. Research progress in flexible mechanisms and their applications[J]. Journal of Mechanical Engineering, 2015, 51(13): 53-68.
doi: 10.3901/jme.2015.13.053
|
| 9 |
杨德华,程颖,吴常铖,等. 一种基于双正交弹性簧片的球链:CN108050151A[P].2018-05-18.
YANG D H, CHENG Y, WU C C, et al. A ball chain based on biorthogonal elastic spring: CN108050151A[P]. 2018-05-18.
|
| 10 |
LONBONTIU N, GARLOBONTIU N, GARCIAE E . Two-axis flexure hinges with axially collocated and symmetric notches[J]. Computers and Structures, 2003,81: 1329-1341.
|
| 11 |
朱仁胜,沈健.双轴柔性铰链柔度的设计计算[J].合肥工业大学学报,2009,32(9):1370-1373.
ZHU R S, SHEN J. Design and calculation of flexibility of two-axis flexible hinge[J]. Journal of Hefei University of Technology, 2009, 32(9): 1370-1373.
|
| 12 |
陈应舒,朱淳逸. 椭圆弧型柔性球铰的柔度矩阵计算与分析[J].机械设计与研究,2015,31(5):51-54,61.
CHEN Y S, ZHU C Y. Calculation and analysis of flexibility matrix of elliptical arc flexible spherical joint[J]. Mechanical Design and Research, 2015, 31(5): 51-54, 61.
|
| 13 |
LOBONTIU N.Compliant mechanisms: Design of flexure hinges[M]. London: CRC Press, 2003.
|
| 14 |
于靖军,毕树生,裴旭,等.柔性设计:柔性机构的分析与综合[M].北京:高等教育出版社,2018:107-114.
YU J J, BI S S, PEI X, et al. Flexible design: Analysis and synthesis of flexible mechanisms[M]. Beijing: Higher Education Press, 2018: 107-114.
|
| 15 |
李政.二自由度大行程微定位平台设计与运动控制[D].天津:天津大学,2014:20-27.
LI Z. Design and motion control of two-degree-of-freedom large-stroke micro-positioning platform[D]. Tianjin: Tianjin University, 2014: 20-27.
|
| 16 |
刘鸿文.材料力学[M].北京:高等教育出版社,1992.
LIU H W. Material mechanics[M]. Beijing: Higher Education Press, 1992.
|
| 17 |
AL-JODAH A, SHIRINZADEH B, GHAFARIAN M, et al. Modeling and a cross-coupling compensation control methodology of a large range 3-DOF micropositioner with low parasitic motions[J]. Mechanism and Machine Theory, 2023, 162: 104334.
|
| 18 |
于阳,王学问,徐振邦,等.基于柔性铰链的大口径望远镜并联调整机构[J].光学精密工程,2023,31(3):352-362. doi:10.37188/ope.20233103.0352
YU Y, WANG X W, XU Z B, et al. Parallel adjustment mechanism for large aperture telescope based on flexible hinges[J]. Optical Precision Engineering, 2023, 31(3): 352-362.
doi: 10.37188/ope.20233103.0352
|
| 19 |
杨春辉,刘平安.圆弧型柔性球铰柔度设计计算[J].工程设计学报,2014,21(4):389-392,404. doi:10.3785/j.issn.1006-754X.2014.04.014
YANG C H, LIU P A. Design and calculation of flexibility of circular arc flexible spherical joint[J]. Chinese Journal of Engineering Design, 2014, 21(4): 389-392, 404.
doi: 10.3785/j.issn.1006-754X.2014.04.014
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|