[1]
KARAVARSAMIS S, GKIKA I, GKITSAS V, et al A survey of deep learning-based image restoration methods for enhancing situational awareness at disaster sites: the cases of rain, snow and haze
[J]. Sensors , 2022 , 22 (13 ): 4707 - 4751
[本文引用: 1]
[2]
LIU Y F, JAW D W, HUANG S C, et al DesnowNet: context-aware deep network for snow removal
[J]. IEEE Transactions on Image Processing , 2018 , 27 (6 ): 3064 - 3073
DOI:10.1109/TIP.2018.2806202
[本文引用: 1]
[3]
CHEN W T, FANG H Y, DING J J, et al. JSTASR: joint size and transparency-aware snow removal algorithm based on modified partial convolution and veiling effect removal [C]// Computer Vision – ECCV 2020 . [S.l.]: Springer, 2020: 754–770.
[本文引用: 1]
[4]
LI B, REN W, FU D, et al Benchmarking single-image dehazing and beyond
[J]. IEEE Transactions on Image Processing , 2019 , 28 (1 ): 492 - 505
DOI:10.1109/TIP.2018.2867951
[本文引用: 1]
[5]
CHEN W T, FANG H Y, HSIEH C L, et al. All snow removed: single image desnowing algorithm using hierarchical dual-tree complex wavelet representation and contradict channel loss [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 4176–4185.
[本文引用: 1]
[6]
CHEN H, REN J, GU J, et al. Snow removal in video: a new dataset and a novel method [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Paris: IEEE, 2023: 13165–13176.
[本文引用: 1]
[7]
ZHANG K, LI R, YU Y, et al Deep dense multi-scale network for snow removal using semantic and depth priors
[J]. IEEE Transactions on Image Processing , 2021 , 30 : 7419 - 7431
DOI:10.1109/TIP.2021.3104166
[本文引用: 2]
[8]
GEIGER A, LENZ P, STILLER C, et al Vision meets robotics: the KITTI dataset
[J]. International Journal of Robotics Research , 2013 , 32 (11 ): 1231 - 1237
DOI:10.1177/0278364913491297
[本文引用: 1]
[9]
CORDTS M, OMRAN M, RAMOS S, et al. The Cityscapes dataset for semantic urban scene understanding [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 3213–3223.
[本文引用: 1]
[10]
JANOSOVITS J. Cityscapes TL++: semantic traffic light annotations for the Cityscapes dataset [C]// Proceedings of the International Conference on Robotics and Automation . Philadelphia: IEEE, 2022: 2569–2575.
[本文引用: 1]
[11]
HAO J, JIANG M, HUANG Y, et al. Scatter inpainting algorithm for rain or snow removal in a single image [C]// Proceedings of the IEEE 4th International Conference on Computer and Communications . Chengdu: IEEE, 2018: 1700–1704.
[本文引用: 1]
[12]
黄鹤, 李文龙, 吴琨, 等 动态自适应特征融合的MFOPA跟踪器
[J]. 电子学报 , 2023 , 51 (5 ): 1350 - 1358
[本文引用: 1]
HUANG He, LI Wenlong, WU Kun, et al MFOPA tracker with dynamic adaptive feature fusion
[J]. Acta Electronica Sinica , 2023 , 51 (5 ): 1350 - 1358
[本文引用: 1]
[13]
HAO Z, YOU S, LI Y, et al. Learning from synthetic photorealistic raindrop for single image raindrop removal [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshop . Seoul: IEEE, 2019: 4340–4349.
[本文引用: 1]
[14]
黄鹤, 李战一, 胡凯益, 等 融合大气光值-图估计的无人机航拍图像去雾
[J]. 哈尔滨工业大学学报 , 2023 , 55 (5 ): 88 - 97
DOI:10.11918/202111001
[本文引用: 1]
HUANG He, LI Zhanyi, HU Kaiyi, et al UAV aerial image dehazing by fusion of atmospheric light value and graph estimation
[J]. Journal of Harbin Institute of Technology , 2023 , 55 (5 ): 88 - 97
DOI:10.11918/202111001
[本文引用: 1]
[15]
HUANG H, LI Z, NIU M, et al A sea fog image defogging method based on the improved convex optimization model
[J]. Journal of Marine Science and Engineering , 2023 , 11 (9 ): 1775
DOI:10.3390/jmse11091775
[本文引用: 1]
[16]
BOVIK A C Referenceless prediction of perceptual fog density and perceptual image defogging
[J]. IEEE Transactions on Image Processing , 2015 , 24 (11 ): 3888 - 3901
DOI:10.1109/TIP.2015.2456502
[本文引用: 1]
[17]
WANG T, YANG X, XU K, et al. Spatial attentive single-image deraining with a high quality real rain dataset [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 12262–12271.
[本文引用: 1]
[18]
WANG Z, BOVIK A C, SHEIKH H R, et al Image quality assessment: from error visibility to structural similarity
[J]. IEEE Transactions on Image Processing , 2004 , 13 (4 ): 600 - 612
DOI:10.1109/TIP.2003.819861
[本文引用: 1]
[19]
黄鹤, 胡凯益, 宋京, 等 雾霾线求解透射率的二次优化方法
[J]. 西安交通大学学报 , 2021 , 55 (8 ): 130 - 138
[本文引用: 1]
HUANG He, HU Kaiyi, SONG Jing, et al A twice optimization method for solving transmittance with haze-lines
[J]. Journal of Xi’an Jiaotong University , 2021 , 55 (8 ): 130 - 138
[本文引用: 1]
[20]
黄莺, 胡凯益, 李战一, 等 含明亮区域的无人机遥感定位图像去雾方法
[J]. 火力与指挥控制 , 2024 , 49 (5 ): 130 - 136
DOI:10.3969/j.issn.1002-0640.2024.05.018
[本文引用: 1]
HUANG Ying, HU Kaiyi, LI Zhanyi, et al Dehazing method for the remote sensing and positioning image of UAV with bright area
[J]. Fire Control and Command Control , 2024 , 49 (5 ): 130 - 136
DOI:10.3969/j.issn.1002-0640.2024.05.018
[本文引用: 1]
A survey of deep learning-based image restoration methods for enhancing situational awareness at disaster sites: the cases of rain, snow and haze
1
2022
... 自动驾驶技术面临雪天视觉感知的挑战,有效的样本数据是测试视觉感知性能的关键. 雨雾天气里空气中的水雾颗粒折射或者反射导致场景信息的损失[1 ] ;在雪天场景中,雪花会直接阻挡光线传播,积雪覆盖还可能遮挡视野. ...
DesnowNet: context-aware deep network for snow removal
1
2018
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
Benchmarking single-image dehazing and beyond
1
2019
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
Deep dense multi-scale network for snow removal using semantic and depth priors
2
2021
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
... [7 ]还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
Vision meets robotics: the KITTI dataset
1
2013
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 雪天样本库较少,已有的雪天样本库研究以雪线模型为主. Liu等[2 ] 提出的Snow100k样本库包括合成样本数据和真实数据集,提供了100 000个合成雪天场景样本对和1 329个真实雪天场景样本. Chen等[3 ] 提出的SRRS(snow removal in realistic scenario)样本库包含15 000个合成数据和1 000个来自网络的真实数据,其中合成原始数据集取自RESIDE(realistic single image dehazing)[4 ] 数据集. Chen等[5 ] 提出的CSD(comprehensive snow dataset)样本库包含10 000张合成图像,这些合成图像取自RESIDE数据集,采用图像编辑软件(如PhotoShop)进行雪线的数据合成. Chen等[6 ] 提出的RVSD(realistic video desnowing dataset)视频样本库中有110组雪天视频数据,每组数据均包含雪、雾、晴朗场景数据,通过渲染引擎和各种增强技术生成具有多种逼真物理属性的雪. Zhang等[7 ] 使用Photoshop建立基于公共数据集KITTI2012[8 ] 的SnowKITTI2012数据集,它包含训练图片1 500张,测试图片1 000张. Zhang等[7 ] 还提出基于Cityscapes[9 -10 ] 数据集的SnowCityScapes数据集,其中训练和测试图片各2 000张. ...
1
... 积雪是常见的雪天场景,积雪覆盖物体表面会阻碍目标观察,积雪较强的反光特性还可能影响感知周围物体[11 -12 ] . 定义p x ,y 图1 所示的晴天场景图像可知,平坦物体表面的色彩变化较小,甚至很难被观测到;物体边缘区域的色彩变化明显. 图1 中,路面区域相对平坦,像素整体变化较小,护栏和树木的像素变化较大. ...
动态自适应特征融合的MFOPA跟踪器
1
2023
... 积雪是常见的雪天场景,积雪覆盖物体表面会阻碍目标观察,积雪较强的反光特性还可能影响感知周围物体[11 -12 ] . 定义p x ,y 图1 所示的晴天场景图像可知,平坦物体表面的色彩变化较小,甚至很难被观测到;物体边缘区域的色彩变化明显. 图1 中,路面区域相对平坦,像素整体变化较小,护栏和树木的像素变化较大. ...
动态自适应特征融合的MFOPA跟踪器
1
2023
... 积雪是常见的雪天场景,积雪覆盖物体表面会阻碍目标观察,积雪较强的反光特性还可能影响感知周围物体[11 -12 ] . 定义p x ,y 图1 所示的晴天场景图像可知,平坦物体表面的色彩变化较小,甚至很难被观测到;物体边缘区域的色彩变化明显. 图1 中,路面区域相对平坦,像素整体变化较小,护栏和树木的像素变化较大. ...
1
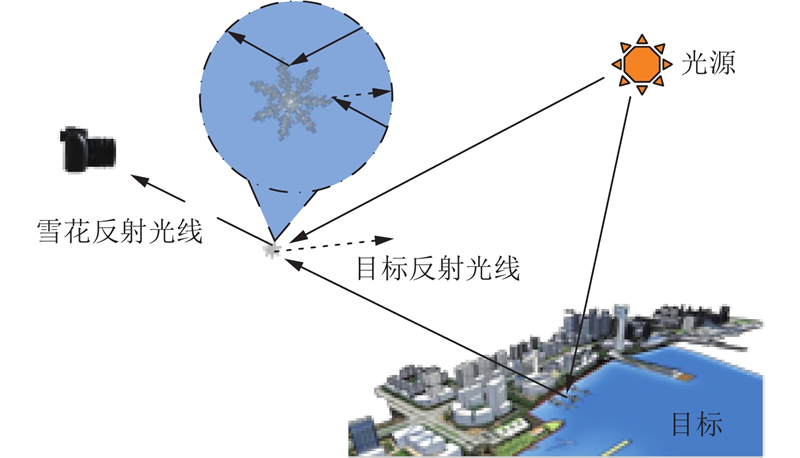
... 与雨线模型[13 ] 相似,雪线模型是模拟场景干扰物在空气中运动的视觉画面;不同的是,雨滴受重力因素影响较大,尺寸几乎相同,运动方向相对统一;雪花受重力影响较小,受空气阻力的影响较大,运动方向和轨迹变化较大,下落形式也有单片成团之分. 如图4 所示,雪花会将原本物体的反射光线吸收或反射,产生视觉上的白亮效果. 构建雪线模型,表达式为 ...
融合大气光值-图估计的无人机航拍图像去雾
1
2023
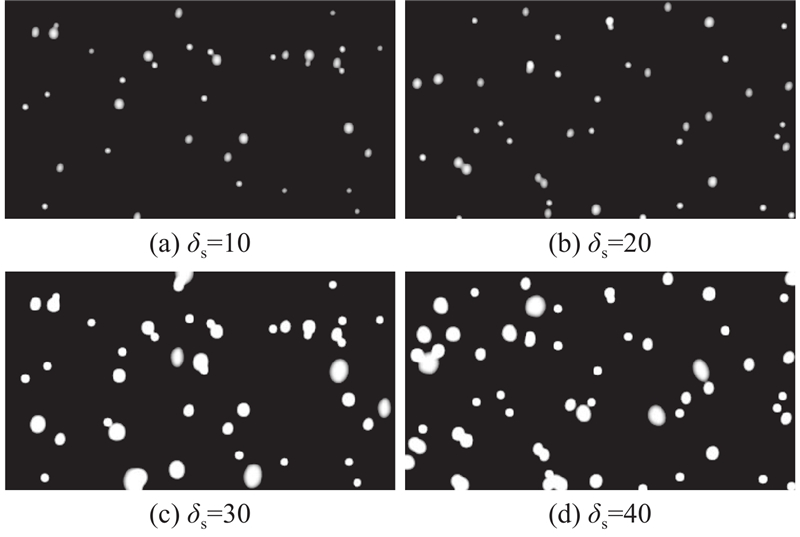
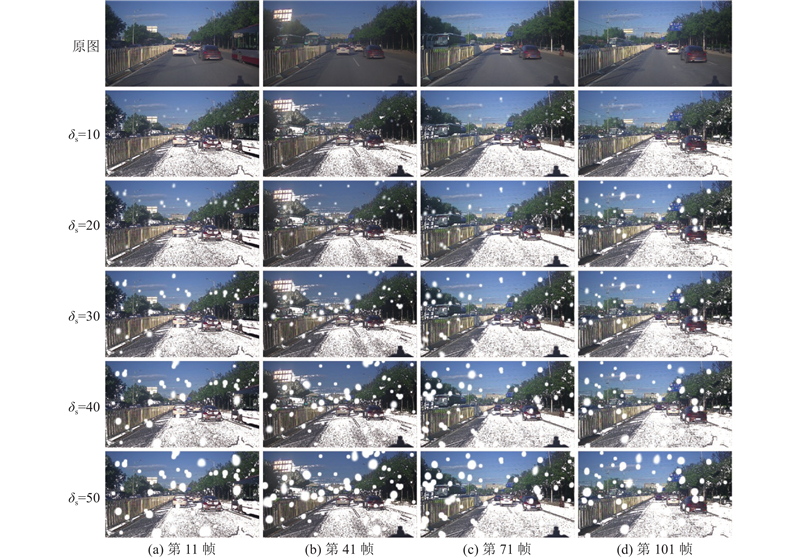
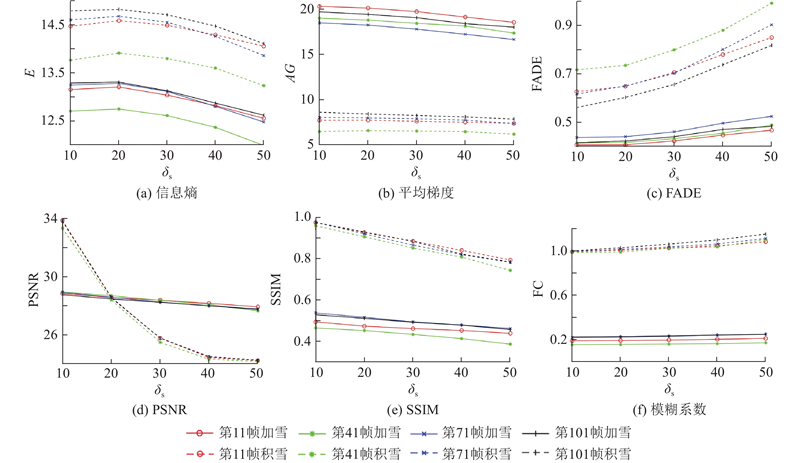
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
融合大气光值-图估计的无人机航拍图像去雾
1
2023
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
A sea fog image defogging method based on the improved convex optimization model
1
2023
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
Referenceless prediction of perceptual fog density and perceptual image defogging
1
2015
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
1
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
Image quality assessment: from error visibility to structural similarity
1
2004
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
雾霾线求解透射率的二次优化方法
1
2021
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
雾霾线求解透射率的二次优化方法
1
2021
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
含明亮区域的无人机遥感定位图像去雾方法
1
2024
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...
含明亮区域的无人机遥感定位图像去雾方法
1
2024
... 选用无参评价指标:信息熵E [14 ] 、平均梯度AG[15 ] 、雾感知密度评估FADE[16 ] ;有参评价指标:峰值信噪比PSNR[17 ] 、结构相似性指数SSIM[18 ] 、模糊系数FC[19 -20 ] 对所提算法的性能进行客观评价,各帧图像在不同雪线密度下客观评价指标曲线如图10 所示. 受雪线影响,图像信息熵不断降低,FADE不断增加,由于雪线总体覆盖面积较小,平均梯度下降不明显. PSNR及SSIM均随雪线密度增大而降低,模糊系数不断增大. 由于受积雪影响,雪线对图像质量的影响降低,导致积雪条件下PSNR、SSIM及模糊系数变化缓慢. 如表1 所示为各帧图像在不同雪线密度下客观评价指标的平均值. 可以看出,随着δ s 的增加,信息熵、平均梯度、PSNR、SSIM逐步减小,FADE和模糊系数不断增大,与实际情况相符合. 结果表明,所提算法处理可有效获得不同雪量下的雪天场景效果. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}