[1]
梁龙. 颈椎康复操对神经根型颈椎病的干预作用及机制研究[D]. 北京: 中国中医科学院, 2020.
[本文引用: 1]
LIANG long. The study on the effect and mechanism of cervical rehabilitation exercise for cervical radiculopathy [D]. Beijing: China Academy of Chinese Medical Sciences, 2020.
[本文引用: 1]
[2]
ALAGINGI N K Chronic neck pain and postural rehabilitation: a literature review
[J]. Journal of Bodywork and Movement Therapies , 2022 , 32 : 201 - 206
DOI:10.1016/j.jbmt.2022.04.017
[本文引用: 1]
[5]
FU T WANG Y JING Q, et al Effects of static resistance training of neck muscles on neck type cervical spondylosis with upper cross syndrome
[J]. Journal of Mechanics in Medicine and Biology , 2022 , 22 (9 ): 2240057
DOI:10.1142/S0219519422400577
[本文引用: 1]
[6]
梁邱, 杨静怡, 戈岩蕾, 等 肌内效贴联合渐进式抗阻肌力训练治疗肩峰下撞击综合征的临床疗效观察
[J]. 华西医学 , 2019 , 34 (7 ): 801 - 806
LIANG Qiu, YANG Jingyi, GE Yanlei, et al Kinesio tape combined with progressive resistance training in the treatment of subacromial impingement syndrome
[J]. West China Medical Journal , 2019 , 34 (7 ): 801 - 806
[7]
FARRELL S F, DE ZOETE R M J, CABOT P J, et al Systemic inflammatory markers in neck pain: a systematic review with meta-analysis
[J]. European Journal of Pain , 2020 , 24 (9 ): 1666 - 1686
DOI:10.1002/ejp.1630
[本文引用: 1]
[8]
BELAVY D L, VAN OOSTERWIJCK J, CLARKSON M, et al Pain sensitivity is reduced by exercise training: evidence from a systematic review and meta-analysis
[J]. Neuroscience and Biobehavioral Reviews , 2021 , 120 : 100 - 108
DOI:10.1016/j.neubiorev.2020.11.012
[本文引用: 1]
[9]
LIDEGAARD M, JENSEN R B, ANDERSEN C H, et al Effect of brief daily resistance training on occupational neck/shoulder muscle activity in office workers with chronic pain: randomized controlled trial
[J]. BioMed Research International , 2013 , 2013 : 262386
[本文引用: 1]
[10]
PORTERO P, BIGARD A X, GAMET D, et al Effects of resistance training in humans on neck muscle performance, and electromyogram power spectrum changes
[J]. European Journal of Applied Physiology , 2001 , 84 : 540 - 546
DOI:10.1007/s004210100399
[本文引用: 1]
[11]
麻玉梅, 马黎娜, 郭海云, 等 智能可穿戴设备在加速康复外科中的应用综述
[J]. 医疗卫生装备 , 2023 , 44 (5 ): 102 - 108
[本文引用: 1]
MA Yumei, MA Lina, GUO Haiyun, et al Review of smart wearable device applied in enhanced recovery after surgery
[J]. Chinese Medical Equipment Journal , 2023 , 44 (5 ): 102 - 108
[本文引用: 1]
[12]
刘德斌, 王旦, 陈柏, 等 外肢体机器人研究综述
[J]. 浙江大学学报: 工学版 , 2021 , 55 (2 ): 251 - 258
[本文引用: 1]
LIU Debin, WANG Dan, CHEN Bai, et al A survey of supernumerary robotic limbs
[J]. Journal of Zhejiang University: Engineering Science , 2021 , 55 (2 ): 251 - 258
[本文引用: 1]
[13]
WANG Y, CAO J, GENG R, et al Study on the design and control method of a wire-driven waist rehabilitation training parallel robot
[J]. Robotica , 2022 , 40 (10 ): 3499 - 3513
DOI:10.1017/S0263574722000376
[本文引用: 1]
[15]
张立雄. 基于ARM的颈椎牵引系统的设计与实现[D]. 西安: 西安建筑科技大学, 2018.
[本文引用: 3]
ZHANG Lixiong. Design and implementation of cervical vertebra traction system based on ARM [D]. Xi’an: Xi’an University of Architecture and Technology, 2018.
[本文引用: 3]
[16]
WANG C, HU Z, JIA L, et al Development of a rehabilitation instrument of neurological training for cervical spine
[J]. Journal of Biomedical Science and Engineering , 2022 , 15 (11 ): 269 - 279
DOI:10.4236/jbise.2022.1511024
[本文引用: 1]
[17]
郝天泽, 肖华平, 刘书海, 等 集成化智能软体机器人研究进展
[J]. 浙江大学学报: 工学版 , 2021 , 55 (2 ): 229 - 243
[本文引用: 1]
HAO Tianze, XIAO Huaping, LIU Shuhai, et al Research status of integrated intelligent soft robots
[J]. Journal of Zhejiang University: Engineering Science , 2021 , 55 (2 ): 229 - 243
[本文引用: 1]
[18]
MONTEIRO N M B, DA SILVA M P T, FOLGADO J O M G, et al Structural analysis of the intervertebral discs adjacent to an interbody fusion using multibody dynamics and finite element cosimulation
[J]. Multibody System Dynamics , 2011 , 25 : 245 - 270
DOI:10.1007/s11044-010-9226-7
[本文引用: 1]
[20]
粟思橙. 基于肌肉主动力的颈部有限元建模研究[D]. 长沙: 湖南大学, 2014.
[本文引用: 1]
SU Sicheng. Finite element modeling of human neck with muscle activation [D]. Changsha: Hunan University, 2014.
[本文引用: 1]
[21]
李想. 牵引式颈椎康复机器人康复控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
[本文引用: 3]
LI Xiang. Research on rehabilitation control strategy of traction cervical spine rehabilitation robot [D]. Harbin: Harbin Institute of Technology, 2020.
[本文引用: 3]
[22]
WU X, XIONG C, YANG S, et al. A simplified space vector pulsewidth modulation scheme for three-phase cascaded H-bridge inverters [J]. IEEE Transactions on Power Electronics , 2020, 35(4): 4192–4204.
[本文引用: 1]
[23]
MANSELL J, TIERNEY R T, SITLER M R, et al Resistance training and head-neck segment dynamic stabilization in male and female collegiate soccer players
[J]. Journal of Athletic Training , 2005 , 40 (4 ): 310 - 319
[本文引用: 1]
[24]
TIERNEY R T, SITLER M R, SWANIK C B, et al Gender differences in head-neck segment dynamic stabilization during head acceleration
[J]. Medicine and Science in Sports and Exercise , 2005 , 37 (2 ): 272 - 279
DOI:10.1249/01.MSS.0000152734.47516.AA
[本文引用: 1]
[25]
王广欢. 精准定量颈椎康复机器人设计与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
[本文引用: 2]
WANG Guanghuan. Design and experimental research of precise and quantitative cervical rehabilitation robot [D]. Harbin: Harbin Institute of Technology, 2018.
[本文引用: 2]
1
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
1
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
Chronic neck pain and postural rehabilitation: a literature review
1
2022
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
颈椎病牵引治疗专家共识
1
2020
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
颈椎病牵引治疗专家共识
1
2020
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
颈椎病本体感觉康复治疗进展
1
2020
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
颈椎病本体感觉康复治疗进展
1
2020
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
Effects of static resistance training of neck muscles on neck type cervical spondylosis with upper cross syndrome
1
2022
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
肌内效贴联合渐进式抗阻肌力训练治疗肩峰下撞击综合征的临床疗效观察
0
2019
肌内效贴联合渐进式抗阻肌力训练治疗肩峰下撞击综合征的临床疗效观察
0
2019
Systemic inflammatory markers in neck pain: a systematic review with meta-analysis
1
2020
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
Pain sensitivity is reduced by exercise training: evidence from a systematic review and meta-analysis
1
2021
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
Effect of brief daily resistance training on occupational neck/shoulder muscle activity in office workers with chronic pain: randomized controlled trial
1
2013
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
Effects of resistance training in humans on neck muscle performance, and electromyogram power spectrum changes
1
2001
... 颈部损伤包括颈椎疼痛、颈椎间盘突出、颈椎退行性病变等[1 -2 ] ,严重影响患者的生活质量. 人类长时间低头、久坐不动、缺乏运动、不良的姿势使颈椎持续受压,颈椎病已成为全球范围的健康问题[3 -4 ] .对颈部肌肉进行渐进式抗阻训练能够有效缓解颈椎病带来的各种僵硬和疼痛症状[5 -7 ] . 抗阻训练的理念是通过拉伸颈部韧带来增强颈椎的稳定性,从而缓解颈椎疼痛[8 ] . 30名患有慢性颈部和肩部疼痛的女性上班族参加每天2 min为期10周的高强度弹性阻力训练,她们的肌肉力量提高6%,她们的颈肩疼痛强度较对照组的明显降低40%[9 ] . 8名男性在完成为期8周每周3次的颈部侧屈训练后,计算机断层扫描评估的结果显示,抗阻训练能显著增强颈部肌肉力量,并降低颈部浅层肌肉的易疲劳性[10 ] . ...
智能可穿戴设备在加速康复外科中的应用综述
1
2023
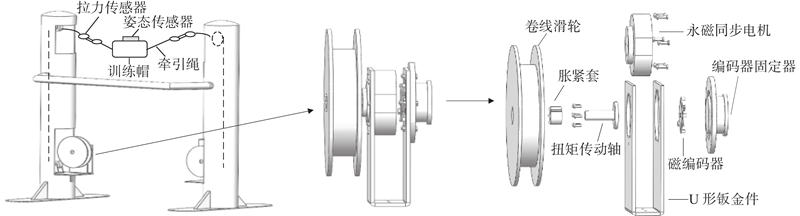
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
智能可穿戴设备在加速康复外科中的应用综述
1
2023
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
外肢体机器人研究综述
1
2021
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
外肢体机器人研究综述
1
2021
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
Study on the design and control method of a wire-driven waist rehabilitation training parallel robot
1
2022
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
负荷可调控颈椎运动康复锻炼机的应用研究
2
2018
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
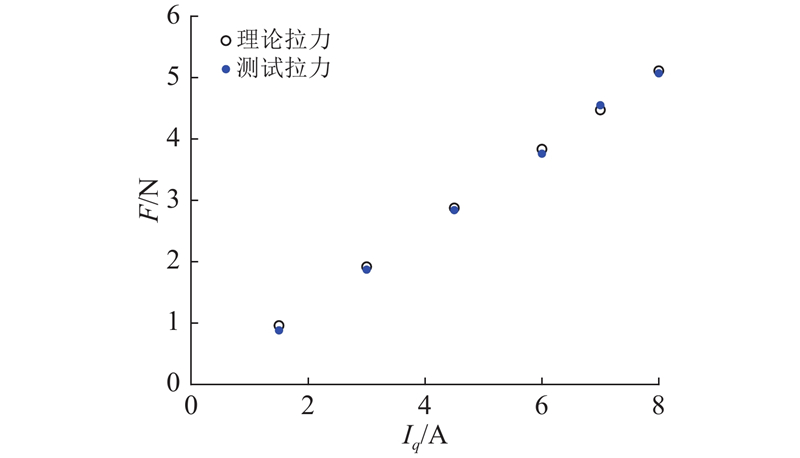
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
负荷可调控颈椎运动康复锻炼机的应用研究
2
2018
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
3
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
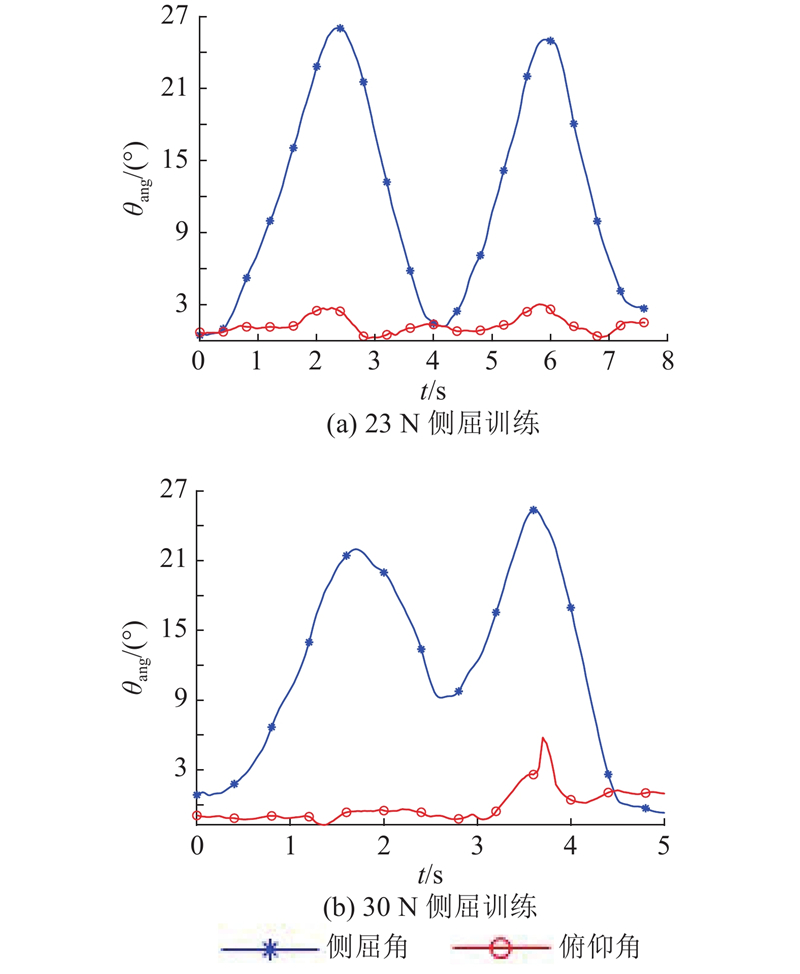
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...
3
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...
Development of a rehabilitation instrument of neurological training for cervical spine
1
2022
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
集成化智能软体机器人研究进展
1
2021
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
集成化智能软体机器人研究进展
1
2021
... 康复机器人作为新型康复辅助工具[11 ] ,其设计开发须融合机械、电子、人工智能和康复医学等多学科知识[12 ] ,旨在帮助患者进行康复训练,促进患者的康复. 康复机器人的开发应用还能够弥补康复治疗师人力短缺的问题[13 ] . 王鑫晨等[14 ] 开发的便捷式悬垂锻炼架由套头帽、负载架和头枕架组成,该设备通过调节砝码来调整训练负载,用于颈椎抗阻训练. 张立雄[15 ] 开发的颈椎牵引设备包括头套、步进电机和牵引绳,该设备通过控制步进电机旋转角来控制牵引拉力. Wang等[16 ] 开发的自主式颈部阻力训练装置以可调节强度的空气弹簧提供颈部伸展活动所需的阻力. 这些设备大多缺乏监控反馈,患者自主训练的可行性较低[17 ] . 合适的训练负载须在使用者进行最佳负载评估测试后才能确定,设备的负载装卸为人工或半自动方式,针对不同个体调整训练负载和训练方案的时间长. 此外,配重块负载的档位有限,不能连续变化,不仅直接影响训练的负载精度,还影响细粒度康复训练方案的定制. ...
Structural analysis of the intervertebral discs adjacent to an interbody fusion using multibody dynamics and finite element cosimulation
1
2011
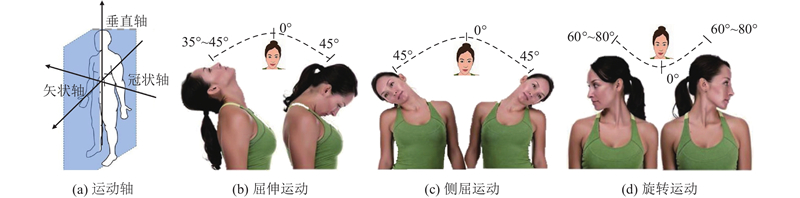
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
多自由度控制牵引治疗神经根型颈椎病的临床研究
1
2019
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
多自由度控制牵引治疗神经根型颈椎病的临床研究
1
2019
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
1
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
1
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
3
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...
3
... 如图1 所示,人体颈椎具有3个运动轴,分别是冠状轴、矢状轴和垂直轴. 运动时,颈椎具有6个自由度,包括3个角位移和3个线位移[18 ] . 3个线位移分别是沿冠状轴方向的左右平移、沿矢状轴方向的前后平移和沿垂直轴方向的压缩拉伸位移. 3个角位移是围绕3个运动轴的旋转,包括屈伸运动、侧屈运动、旋转运动. 在正常情况下,人体头颈部能够完成的所有运动均由这3种角位移及其复合运动组成. 不同的颈部训练动作锻炼不同的肌肉群[19 ] . 以侧屈抗阻训练为例,当患者进行一侧的侧屈训练时,另一侧会产生反向的抗阻拉力,从而锻炼斜角肌和肩胛提肌. 斜角肌和肩胛提肌位于颈椎侧方,连接第一、二肋骨和肩胛骨[20 ] . 抗阻训练的动作幅度可作为颈部康复的指标,如果使用者在多次康复训练后能够在同样的负载拉力下稳定地达到训练动作幅度目标,表示颈部肌肉得到有效治疗[21 ] . ...
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...
1
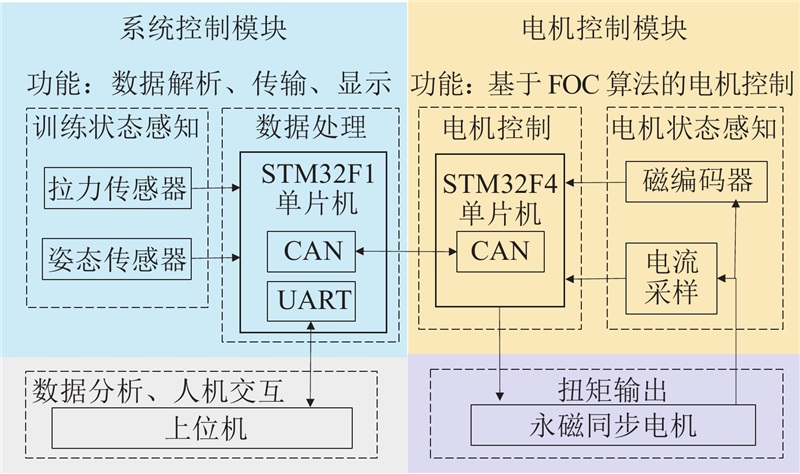
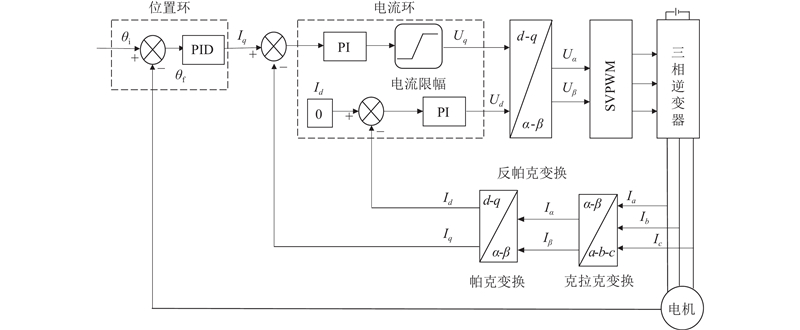
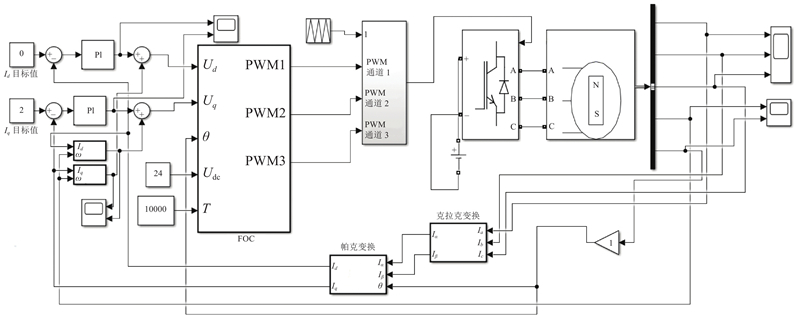
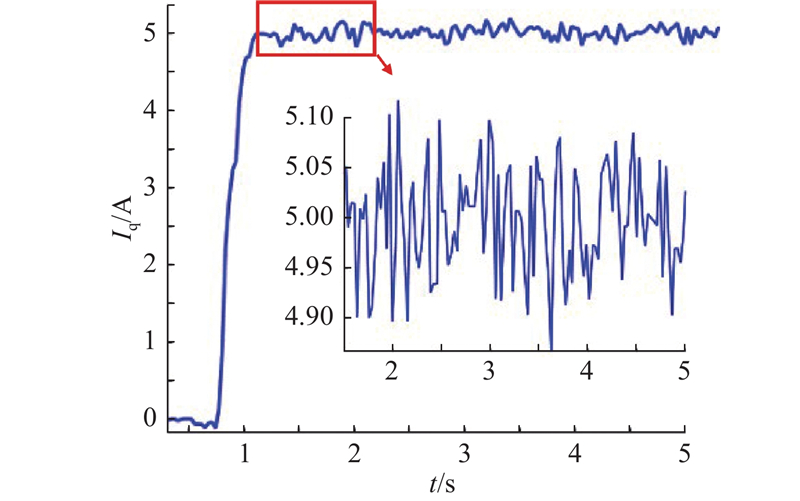
... FOC算法旨在实现对电机的精确控制,核心是将电机的转子磁场与定子磁场解耦,使得转子磁场始终与定子磁场保持相对稳定的相对位置关系. 如图4 所示,通过电流采样将电机的三相电流$ {I}_{{a}} $ $ {I}_{{b}} $ $ {I}_{{c}} $ $ {I}_{\mathrm{\alpha }} $ $ {I}_{\mathrm{\beta }} $ $ {I}_{{d}} $ $ {I}_{{q}} $ [22 ] . 图中,${\theta _{\mathrm{i}}} $ ${\theta _{\mathrm{f}}} $
Resistance training and head-neck segment dynamic stabilization in male and female collegiate soccer players
1
2005
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
Gender differences in head-neck segment dynamic stabilization during head acceleration
1
2005
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
2
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...
2
... 本研究设计的颈部康复机器人系统与现有颈部康复设备进行比较. Mansell等[23 -24 ] 定义颈部康复设备负载的方法是让1.0 kg的物体从15 cm高处落下生成大约50 N的拉力,并使用拉力传感器进行验证. 这种方法无法持续提供稳定的拉力,且每次训练后都要手动重置重物高度. 王鑫晨等[14 ] 设计的设备采用手动配重方法,通过砝码实现负载调节. 这种设定方式受到砝码档位的限制,且由于缺乏传感器反馈,负载精度高度依赖砝码分配. 手动调节配重块不仅耗时,而且操作的复杂性增加,系统的智能化水平有所降低. 张立雄等[15 ,21 ,25 ] 提出基于力/位混合控制策略和自适应模糊PID控制的方法,以增强负载拉力的稳定性. 与手动康复设备相比,这些自动牵引设备可以通过PID调节减少稳态误差. 由于拉力输出依赖电机的旋转角,调整拉力时必须等待电机旋转到特定位置,使得调节时间被延长. 本研究提出的颈部康复机器人系统,其负载拉力直接与电机转矩电流成正比. 用户可在人机交互界面上直接设置负载,微控制器随即按照公式计算出所需的转矩电流,并进行限幅和PI调节. 这种方法无需等待电机旋转到特定位置,简化了负载调节过程,提升了响应速度,改善了用户体验. ...
... Comparison results of performance and parameter of different neck rehabilitation equipment
Tab.1 设备 $ {e}_{{\mathrm{ss}}} $ T u /s负载调节方式 文献[21 ] 0.60 5.50 电机转动调节 文献[25 ] 0.50 5.00 电机转动调节 文献[15 ] 1.00 3.80 电机转动调节 本研究 0.59 0.53 PI电流调节
3.3. 运动测试结果 3.3.1. 拉力评估测试分析 在拉力评估开始之前,通过人机交互界面校准姿态传感器,将当前位置的XYZ 轴角初始值置为0,使得每次动作的角度峰值可以作为训练的幅度参考值. 以1位测试者侧屈运动的拉力评估为例. 在无负载条件下,该测试者的右侧屈幅度为32°. 在施加评估拉力后,测试者须达到至少25°的侧屈幅度. 如图11 所示为测试者在23 N和30 N拉力下进行右侧屈时头颈部的姿态角${\theta _{{\rm{ang}}}} $ . 头颈部的俯仰角变化反映使用者的下巴位置是否保持在训练的正常范围内,侧屈角的变化用于评估使用者的侧屈幅度. 可以看出,在23 N拉力下,测试者的头部俯仰角度变化始终小于3°,表明在训练过程中头部姿态保持正常,下巴位置适当;此时头部侧屈角的变化率也保持稳定. 图中侧屈角曲线的2个波峰表明,在23 N的拉力下,测试者在2次侧屈训练中均达到25°. 当拉力增加到30 N时,尽管测试者在3~4 s达到25°的侧屈幅度,头部俯仰角却发生显著变化,出现下巴上抬现象,这违背了侧屈训练的规定. 侧屈角的变化曲线显示,在2~3 s,测试者在完成第一次右侧屈后未能回到起始位置,也没有达到25°的规定侧屈幅度. 对比2次实验的数据,可以得出结论:该测试者的适宜负载拉力范围为23~30 N;拉力超过30 N,测试者在训练中保持头部姿态和侧屈幅度的能力会显著下降. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}