抗阻式颈部康复机器人系统设计
Design of resistance neck rehabilitation robot system
抗阻式颈部康复机器人系统设计 |
| 黄松林,郑秀娟,谭笑月,胡兴,涂海燕,李康 |
|
Design of resistance neck rehabilitation robot system |
| Songlin HUANG,Xiujuan ZHENG,Xiaoyue TAN,Xing HU,Haiyan TU,Kang LI |
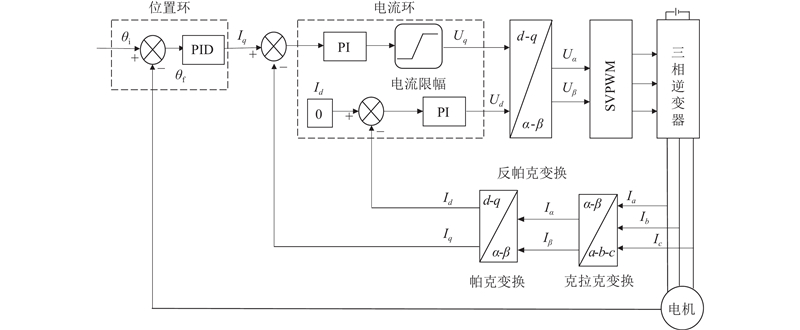
| 图 4 双环磁场定向控制算法的框架 |
| Fig.4 Framework of double-loop field oriented control algorithm |
|
|