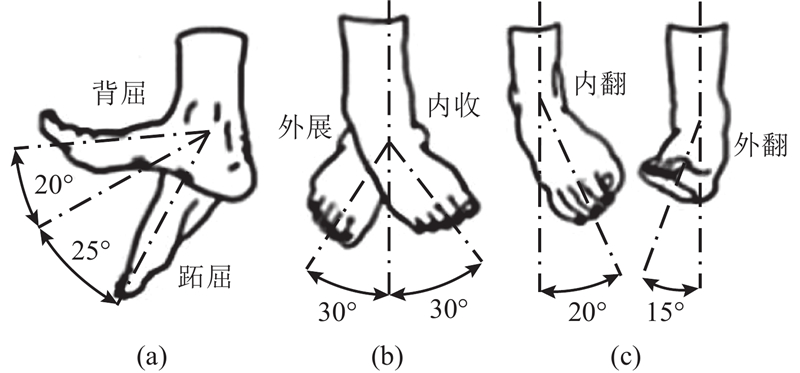
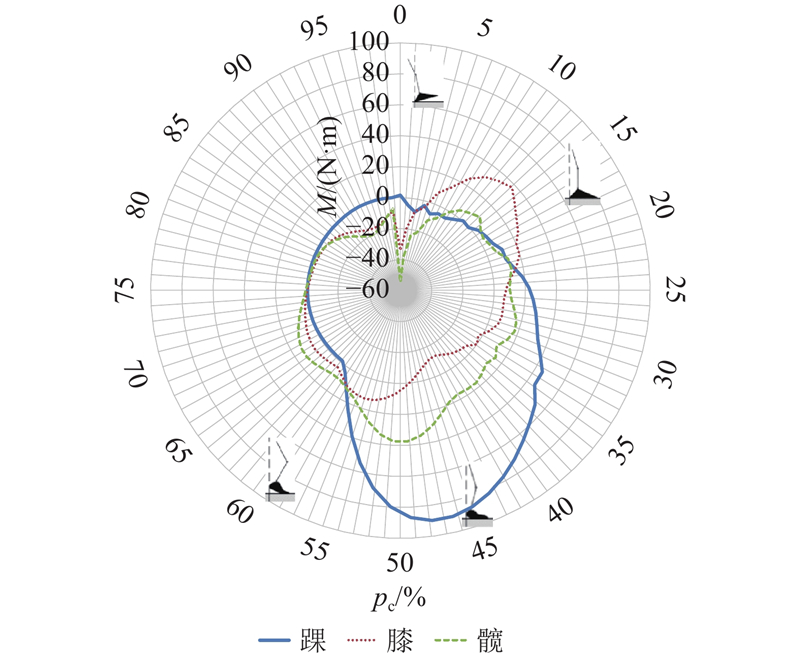
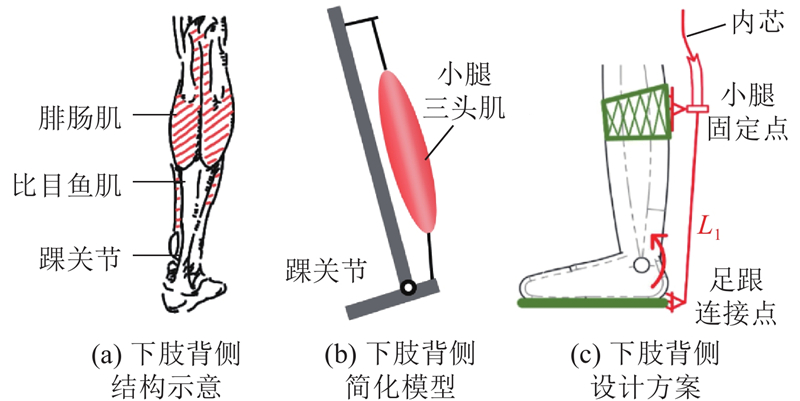
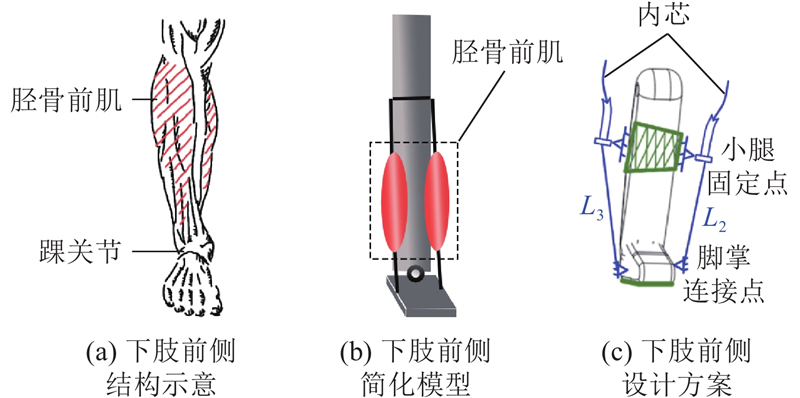
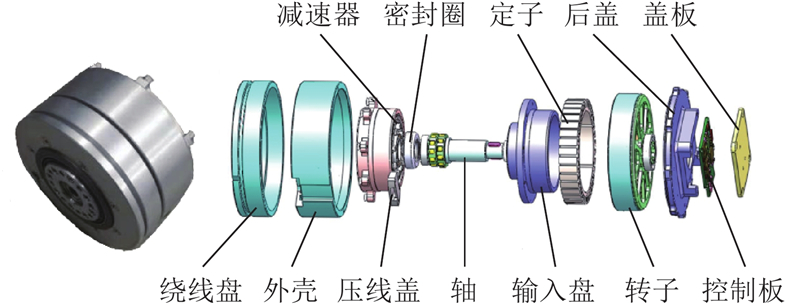
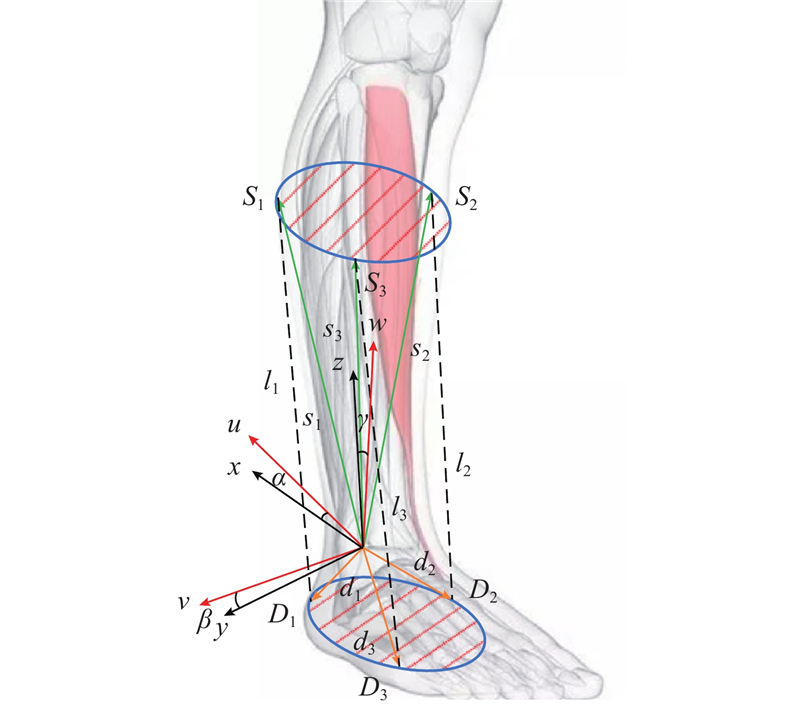
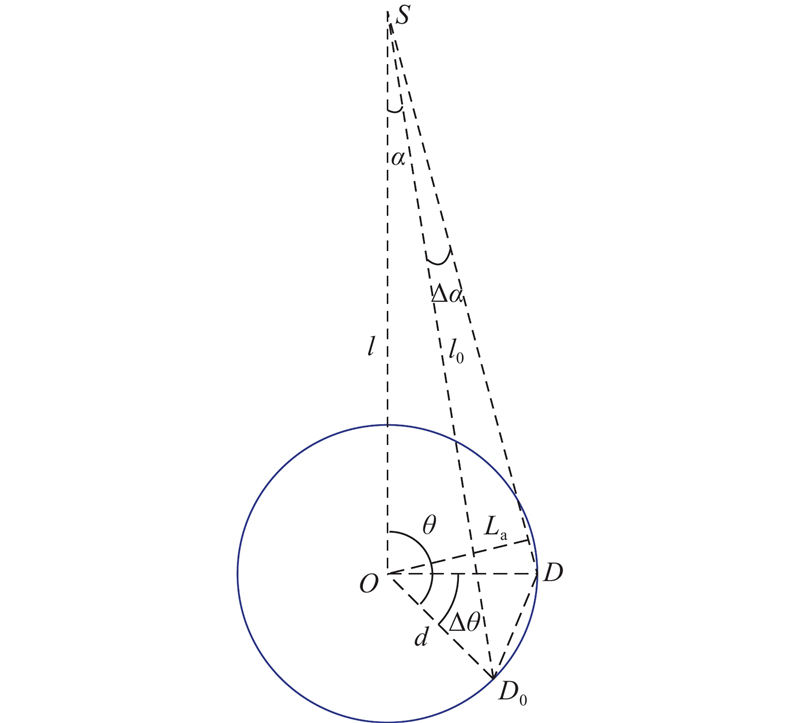
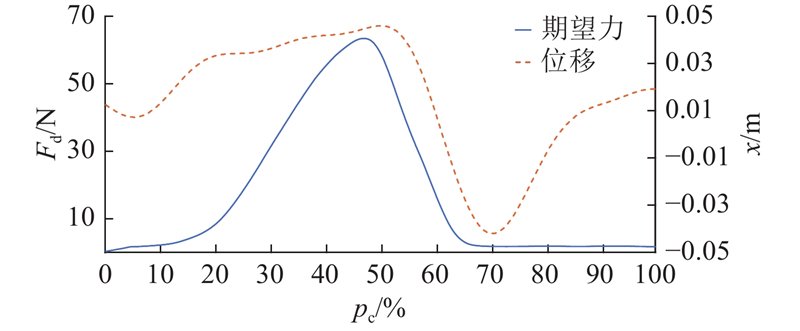
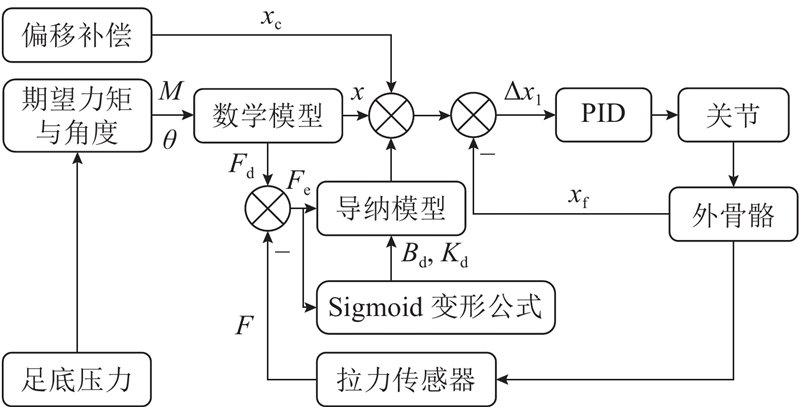
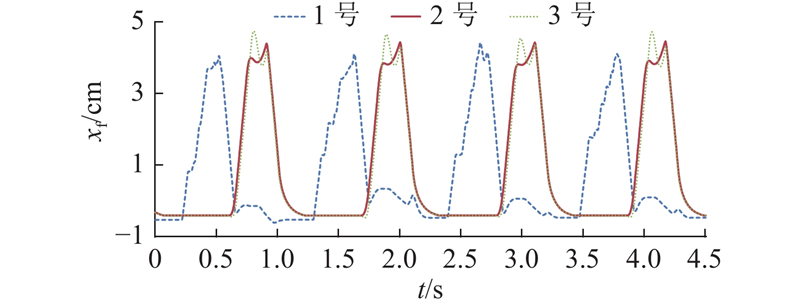
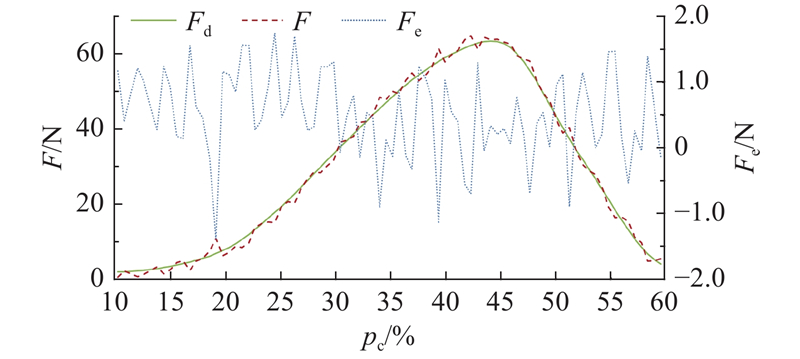
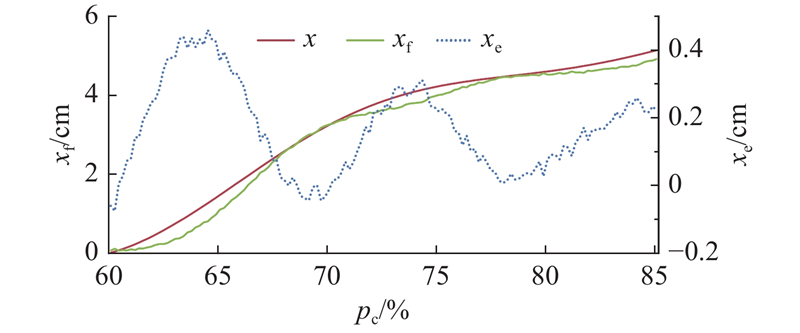
In response to the need for ankle rehabilitation training, a lightweight, easy-to-wear flexible ankle exoskeleton robot was designed using modular drive units and Bowden cables through analysis of ankle joint mechanics. The robot can provide assistance for ankle plantarflexion/dorsiflexion and inversion/eversion movements. Position control and torque control are used for flexible exoskeleton during the dorsiflexion and plantarflexion stages, respectively. Position control is mainly based on traditional proportional integral derivative(PID), while torque control uses force as a feedback signal to establish an admittance model between the interaction force difference and the Bowden cable core displacement compensation. The admittance parameters are dynamically adjusted through the Sigmoid deformation function to meet the requirements of assistive torque output and human-machine interaction compliance. Experimental data showed that the position tracking error was stable within 0.46 cm, and the force output error was stable within −1.5-1.5 N, meeting the needs of human rehabilitation training.
Keywords:ankle joint
;
rehabilitation training
;
flexible exoskeleton
;
force feedback
;
admittance control
CHEN Dong, LI Weida, ZHANG Hongmiao, LI Juan. Ankle flexible exoskeleton based on force feedback admittance control. Journal of Zhejiang University(Engineering Science)[J], 2024, 58(4): 772-778 doi:10.3785/j.issn.1008-973X.2024.04.012
WINFREE K N, STEGALL P, AGRAWAL S K. Design of a minimally constraining, passively supported gait training exoskeleton: ALEX II [C]// 2011 IEEE International Conference on Rehabilitation Robotics . Zurich: IEEE, 2011: 1–6.
WEHNER M, QUINLIVAN B, AUBIN P M, et al. A lightweight soft exosuit for gait assistance [C]// 2013 IEEE International Conference on Robotics and Automation . Karlsruhe: IEEE, 2013: 3362–3369.
Performance estimation of the lower limb exoskeleton for plantarflexion using surface electromyography (sEMG) signals
[J]. Journal of Biomechanical Science and Engineering, 2017, 12 (2): 16- 00595
GASPARRI G M, BAIR M O, LIBBY R P, et al. Verification of a robotic ankle exoskeleton control scheme for gait assistance in individuals with cerebral palsy [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . Madrid: IEEE, 2018: 4673–4678.
CHEN L, CHEN C, WANG Z, et al
A novel lightweight wearable soft exosuit for reducing the metabolic rate and muscle fatigue
BAE J, SIVIY C, ROULEAU M, et al. A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke [C] // 2018 IEEE International Conference on Robotics and Automation (ICRA) . Brisbane: IEEE, 2018: 2820–2827.
SHAN H, JIANG C, MAO Y, et al. Design and control of a wearable active knee orthosis for walking assistance [C]// 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC) . Auckland: IEEE, 2016: 51–56.
ZHANG Q, SHEN X, WANG X, et al. Development of a small clamper for tendon-sheath artificial muscle [C]// 2018 25th International Conference on Mechatronics and Machine Vision in Practice (M2VIP) . Stuttgart: IEEE, 2018: 1–6.
CHRISTIAN O, RANJAN M, YOSHIHIKO N. Unified impedance and admittance control [C]// 2010 IEEE International Conference on Robotics and Automation (ICRA) . Anchorage: IEEE, 2010: 554–561.
YU Honggang. Research and design of flexible exoskeleton of lower extremity [D]. Chengdu: University of Electronic Science and Technology of China, 2020.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}