基于力反馈导纳控制的踝关节柔性外骨骼
Ankle flexible exoskeleton based on force feedback admittance control
基于力反馈导纳控制的踝关节柔性外骨骼 |
| 陈栋,李伟达,张虹淼,李娟 |
|
Ankle flexible exoskeleton based on force feedback admittance control |
| Dong CHEN,Weida LI,Hongmiao ZHANG,Juan LI |
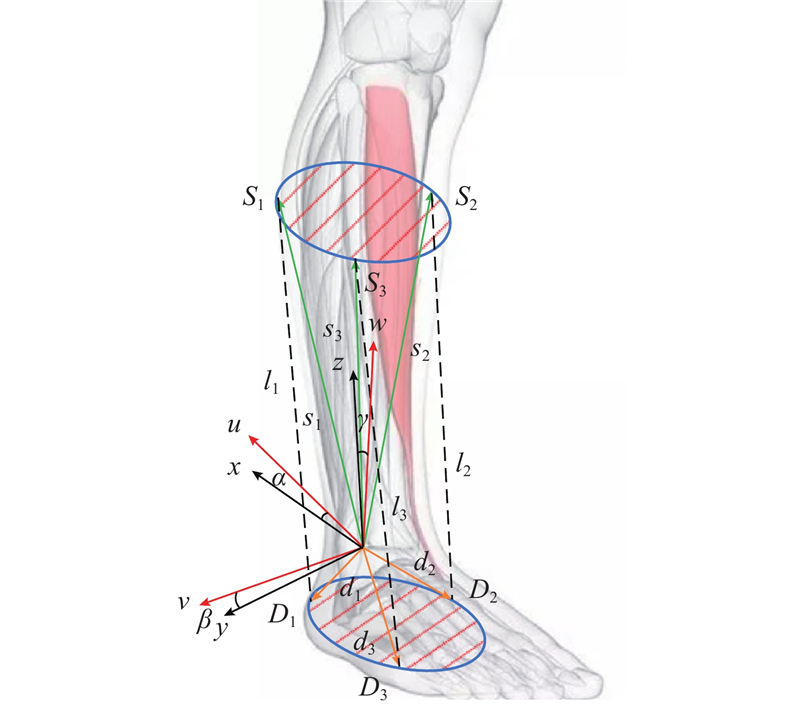
| 图 7 机器人坐标系及运动学分析示意图 |
| Fig.7 Diagram of robot coordinate system and kinematic analysis |
|
|