[54]
GONG Y, HARTLEY R, DA X, et al. Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway [C]//2019 American Control Conference . Philadelphia: IEEE, 2019: 4559-4566.
[本文引用: 1]
[55]
WANG S, BHATIA A, MASON M T, et al. Contact localization using velocity constraints [J]. IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 7351−7358.
[本文引用: 2]
[56]
HWANGBO J, BELLICOSO C D, FANKHAUSER P, et al. Probabilistic foot contact estimation by fusing information from dynamics and differential/forward kinematics [C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 3872-3878.
[本文引用: 2]
[57]
NEUNERT M, FARSHIDIAN F, WINKLER A W, et al Trajectory optimization through contacts and automatic gait discovery for quadrupeds
[J]. IEEE Robotics and Automation Letters , 2017 , 2 (3 ): 1502 - 1509
DOI:10.1109/LRA.2017.2665685
[本文引用: 2]
[58]
HUYNH B P, BAE J. Impact intensity estimation of aquadruped robot without using a force sensor [EB/OL]. (2022-04-03)[2023-10-08]. https://arxiv.org/pdf/2204.01003.
[本文引用: 2]
[59]
CAMURRI M, FALLON M, BAZEILLE S, et al Probabilistic contact estimation and impact detection for state estimation of quadruped robots
[J]. IEEE Robotics and Automation Letters , 2017 , 2 (2 ): 1023 - 1030
DOI:10.1109/LRA.2017.2652491
[本文引用: 4]
[60]
LIN T Y, ZHANG R, YU J, et al. Legged robot state estimation using invariant Kalman filtering and learned contact events [EB/OL]. (2022-11-29)[2023-10-08]. https://arxiv.org/pdf/2106.15713.
[本文引用: 4]
[61]
PIPERAKIS S, MARAVGAKIS M, KANOULAS D, et al. Robust contact state estimation in humanoid walking gaits [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Kyoto: IEEE, 2022: 6732-6738.
[本文引用: 2]
[62]
NAHRENDRA I M A, YU B, MYUNG H. Dreamwaq: learning robust quadrupedal locomotion with implicit terrain imagination via deep reinforcement learning [C]//IEEE International Conference on Robotics and Automation . London: IEEE, 2023: 5078-5084.
[本文引用: 3]
[63]
TAKEMURA H, DEGUCHI M, UEDA J, et al Slip-adaptive walk of quadruped robot
[J]. Robotics and Autonomous Systems , 2005 , 53 (2 ): 124 - 141
DOI:10.1016/j.robot.2005.07.002
[本文引用: 1]
[64]
FOCCHI M, BARASUOL V, FRIGERIO M, et al Slip detection and recovery for quadruped robots
[J]. Robotics Research , 2018 , 2 (11 ): 185 - 199
[本文引用: 1]
[65]
TESHIGAWARA S, SHIMIZU S, TADAKUMA K, et al. High sensitivity slip sensor using pressure conductive rubber [C]//IEEE Sensors . Christchurch: IEEE, 2009: 988-991.
[本文引用: 1]
[1]
CHAI H, LI Y, SONG R, et al A survey of the development of quadruped robots: joint configuration, dynamic locomotion control method and mobile manipulation approach
[J]. Biomimetic Intelligence and Robotics , 2022 , 2 (1 ): 100029
DOI:10.1016/j.birob.2021.100029
[本文引用: 1]
[2]
PIPERAKIS S, TRAHANIAS P. Non-linear ZMP based state estimation for humanoid robot locomotion[C]//IEEE-RAS 16th International Conference on Humanoid Robots . Cancun: IEEE, 2016: 202-209.
[本文引用: 1]
[66]
IWASAKI T, TAKESHITA T, ARINAGA Y, et al Shearing force measurement device with a built-in integrated micro displacement sensor
[J]. Sensors and Actuators A: Physical , 2015 , 221 : 1 - 8
[本文引用: 1]
[67]
JENELTEN F, HWANGBO J, TRESOLDI F, et al Dynamic locomotion on slippery ground
[J]. IEEE Robotics and Automation Letters , 2019 , 4 (4 ): 4170 - 4176
DOI:10.1109/LRA.2019.2931284
[本文引用: 1]
[68]
KOLVENBACH H, ARM P, HAMPP E, et al. Traversing steep and granular martian analog slopes with a dynamic quadrupedal robot [EB/OL]. (2021-06-03)[2023-10-08]. https://arxiv.org/pdf/2106.01974.
[本文引用: 1]
[69]
SHIRWATKAR A, KUMAR S, AMRUTUR B, et al. Realizing linear controllers for quadruped robots on planetary terrains [EB/OL]. [2023-10-08]. https://hex-plex.github.io/publication/exploration/exploration.pdf.
[本文引用: 1]
[70]
MAKOVIYCHUK V, WAWRZYNIAK L, GUO Y, et al. Isaac gym: high performance GPU-based physics simulation for robot learning [EB/OL]. (2021-08-25)[2023-10-08]. https://arxiv.org/pdf/2108.10470.
[本文引用: 1]
[71]
SIVA S, WIGNESS M, ROGERS J, et al. Enhancing consistent ground maneuverability by robot adaptation to complex off-road terrains [C]//Conference on Robot Learning. London: PMLR, 2022: 1200-1210.
[本文引用: 1]
[72]
HULAS J, ZHOU C. Improving quadrupedal locomotion on granular material using genetic algorithm [C]//Robots into the Real World . England: ResearchGate, 2020: 33-34.
[本文引用: 1]
[73]
AJEWOLE P O, MANUWA S I. Establishment of Bekker's model for predicting the pressure-sinkage behaviour of a loamy sand soil [EB/OL]. (2014-09)[2023-10-08]. https://www.researchgate.net/publication/267186683_Establishment_of_Bekker%27s_Model_for_Predicting_the_Pressure-Sinkage_Behaviour_of_a_Loamy_Sand_Soil.
[本文引用: 1]
[74]
AGUILAR J, GOLDMAN D I Robophysical study of jumping dynamics on granular media
[J]. Nature Physics , 2016 , 12 (3 ): 278 - 283
DOI:10.1038/nphys3568
[本文引用: 1]
[75]
JOHNSON J B, DUVOY P X, KULCHITSKY A V, et al Analysis of Mars Exploration Rover wheel mobility processes and the limitations of classical terramechanics models using discrete element method simulations
[J]. Journal of Terramechanics , 2017 , 73 : 61 - 71
DOI:10.1016/j.jterra.2017.09.002
[本文引用: 1]
[3]
FOURMY M, FLAYOLS T, LEZIART P A, et al. Contact forces preintegration for estimation in legged robotics using factor graphs [C]//2021 IEEE International Conference on Robotics and Automation . Xi'an: IEEE, 2021: 1372-1378.
[本文引用: 1]
[4]
PLAYTER R, BUEHLER M, RAIBERT M. BigDog [C]//Unmanned Systems Technology VIII . Florida: SPIE, 2006: 896-901.
[本文引用: 4]
[76]
DEL PRETE A, NORI F, METTA G, et al. Control of contact forces: the role of tactile feedback for contact localization [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Vilamoura-Algarve: IEEE, 2012: 4048-4053.
[本文引用: 1]
[77]
DE LUCA A, MATTONE R. Sensorless robot collision detection and hybrid force/motion control [C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation . Barcelona: IEEE, 2005: 999-1004.
[本文引用: 1]
[78]
DE LUCA A, ALBU-SCHAFFER A, HADDADIN S, et al. Collision detection and safe reaction with the DLR-III lightweight manipulator arm [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Beijing: IEEE, 2006: 1623-1630.
[本文引用: 1]
[79]
VORNDAMME J, SCHAPPLER M, HADDADIN S. Collision detection, isolation and identification for humanoids [C]//IEEE International Conference on Robotics and Automation . Singapore: IEEE, 2017: 4754-4761.
[本文引用: 2]
[80]
MANUELLI L, TEDRAKE R. Localizing external contact using proprioceptive sensors: the contact particle filter [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Daejeon: IEEE, 2016: 5062-5069.
[本文引用: 2]
[81]
BARASUOL V, FINK G, FOCCHI M, et al. On the detection and localization of shin collisions and reactive actions in quadruped robots [C]//International Conference on Climbing and Walking Robots . Kuala Lumpur: Scholars Archive, 2019: 49-51.
[本文引用: 1]
[82]
MORALES J, MARTINEZ J L, MANDOW A, et al Static tip-over stability analysis for a robotic vehicle with a single-axle trailer on slopes based on altered supporting polygons
[J]. IEEE/ASME Transactions on Mechatronics , 2012 , 18 (2 ): 697 - 705
[本文引用: 1]
[83]
KIM H G, LEE D G, SEO T W Rolling stability enhancement via balancing tail for a water-running robot
[J]. Journal of Bionic Engineering , 2015 , 12 (3 ): 395 - 405
DOI:10.1109/TSMC.1979.4310180
[本文引用: 1]
[84]
DIANSHENG C, SITONG L, XUANHAI L, et al. Stability analysis of a mobile health care robot [C]//IEEE International Conference on Real-time Computing and Robotics . Angkor Wat: IEEE, 2016: 591-596.
[本文引用: 1]
[85]
ZHU H, LUO M, MEI T, et al Energy-efficient bio-inspired gait planning and control for biped robot based on human locomotion analysis
[J]. Journal of Bionic Engineering , 2016 , 13 (2 ): 271 - 282
DOI:10.1016/S1672-6529(16)60300-1
[本文引用: 1]
[5]
BLEDT G, POWELL M J, KATZ B, et al. Mit cheetah 3: design and control of a robust, dynamic quadruped robot [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems . Madrid: IEEE, 2018: 2245-2252.
[本文引用: 4]
[6]
SHI F, HOMBERGER T, LEE J, et al. Circus anymal: a quadruped learning dexterous manipulation with its limbs [C]//IEEE International Conference on Robotics and Automation . Xi'an: IEEE, 2021: 2316-2323.
[本文引用: 5]
[7]
BLACKMAN D J, NICHOLSON J V, ORDONEZ C, et al. Gait development on minitaur, a direct drive quadrupedal robot [C]//Unmanned Systems Technology XVIII . Baltimore: SPIE, 2016: 141-155.
[本文引用: 3]
[8]
GARCIA E, DE SANTOS P G On the improvement of walking performance in natural environments by a compliant adaptive gait
[J]. IEEE Transactions on Robotics , 2006 , 22 (6 ): 1240 - 1253
DOI:10.1109/TRO.2006.884343
[本文引用: 1]
[9]
ZHANG X, ZHENG H Walking up and down hill with a biologically-inspired postural reflex in a quadrupedal robot
[J]. Autonomous Robots , 2008 , 1 (25 ): 15 - 24
[本文引用: 1]
[10]
HIROSE S, FUKUDA Y, YONEDA K, et al Quadruped walking robots at Tokyo Institute of Technology
[J]. IEEE Robotics and Automation Magazine , 2009 , 16 (2 ): 104 - 114
DOI:10.1109/MRA.2009.932524
[本文引用: 1]
[11]
NELSON G, SAUNDERS A, NEVILLE N, et al Petman: a humanoid robot for testing chemical protective clothing
[J]. Journal of the Robotics Society of Japan , 2012 , 30 (1 ): 372 - 377
[本文引用: 3]
[12]
KANEKO K, HARADA K, KANEHIRO F, et al. Humanoid robot HRP-3 [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Nice: IEEE, 2008: 2471-2478.
[本文引用: 1]
[13]
GRIFFIN R J, WIEDEBACH G, BERTRAND S, et al. Walking stabilization using step timing and location adjustment on the humanoid robot, atlas [C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems . Vancouver: IEEE, 2017: 667-673.
[本文引用: 5]
[14]
KATZ B, DI CARLO J, KIM S. Mini cheetah: a platform for pushing the limits of dynamic quadruped control [C]// International Conference on Robotics and Automation . Montreal: IEEE, 2019: 6295-6301.
[本文引用: 2]
[15]
SEMINI C, TSAGARAKIS N G, GUGLIELMINO E, et al Design of HyQ: a hydraulically and electrically actuated quadruped robot
[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering , 2011 , 225 (6 ): 831 - 849
DOI:10.1177/0959651811402275
[本文引用: 1]
[16]
BELLEGARDA G, CHEN Y, LIU Z, et al. Robust high-speed running for quadruped robots via deep reinforcement learning [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Kyoto: IEEE, 2022: 10364-10370.
[本文引用: 1]
[17]
FERREIRA J, MOREIRA A P, SILVA M, et al. A survey on localization, mapping, and trajectory planning for quadruped robots in vineyards [C]//IEEE International Conference on Autonomous Robot Systems and Competitions . Santa Maria da Feira: IEEE, 2022: 237-242.
[本文引用: 1]
[18]
MURPHY M P, SAUNDERS A, MOREIRA C, et al The littledog robot
[J]. The International Journal of Robotics Research , 2011 , 30 (2 ): 145 - 149
DOI:10.1177/0278364910387457
[本文引用: 1]
[20]
LIN J, DENG G, CHEN L, et al. Bionic architecture design and robust rough-terrain locomotion for a high-payload quadrupedal robot [C]//IEEE International Conference on Robotics and Biomimetics . Dali: IEEE, 2019: 1027-1034.
[本文引用: 1]
[22]
HIROSE S, KATO K. Study on quadruped walking robot in Tokyo Institute of Technology-past, present and future [C]//IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000: 414-419.
[本文引用: 1]
[86]
SARDAIN P, BESSONNET G Forces acting on a biped robot. center of pressure-zero moment point
[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans , 2004 , 34 (5 ): 630 - 637
DOI:10.1109/TSMCA.2004.832811
[本文引用: 1]
[87]
BELLICOSO C D, JENELTEN F, GEHRING C, et al Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots
[J]. IEEE Robotics and Automation Letters , 2018 , 3 (3 ): 2261 - 2268
DOI:10.1109/LRA.2018.2794620
[本文引用: 1]
[88]
KHORRAM M, MOOSAVIAN S A A. Balance recovery of a quadruped robot [C]//3rd RSI International Conference on Robotics and Mechatronics . Tehran: IEEE, 2015: 259-264.
[本文引用: 1]
[89]
CHEROUVIM N, PAPADOPOULOS E. Use of a novel multipart controller for the parametric study of a trotting quadruped robot [C]//IEEE International Conference on Robotics and Automation . Pasadena: IEEE, 2008: 805-810.
[本文引用: 1]
[90]
DI CARLO J, WENSING P M, KATZ B, et al. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Madrid: IEEE, 2018: 1-9.
[本文引用: 1]
[91]
BUCHANAN R, CAMURRI M, FALLON M. Haptic sequential Monte Carlo localization for quadrupedal locomotion in vision-denied scenarios [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Kyoto: IEEE, 2020: 3657-3663.
[本文引用: 1]
[92]
WISTH D, CAMURRI M, FALLON M VILENS: visual, inertial, lidar, and leg odometry for all-terrain legged robots
[J]. IEEE Transactions on Robotics , 2022 , 39 (1 ): 309 - 326
[本文引用: 2]
[93]
LENS T, RADKHAH K, VON STRYK O. Simulation of dynamics and realistic contact forces for manipulators and legged robots with high joint elasticity [C]//15th International Conference on Advanced Robotics . Tallinn: IEEE, 2011: 34-41.
[本文引用: 1]
[94]
KOLVENBACH H, BREITENSTEIN M, GEHRING C, et al. Scalability analysis of legged robots for space exploration [C]//68th International Astronautical Congress . Adelaide: Curran, 2018: 10399-10413.
[本文引用: 1]
[95]
MUDALIGE N D W, NAZAROVA E, BABATAEV I, et al. Dogtouch: CNN-based recognition of surface textures by quadruped robot with high density tactile sensors [C]//IEEE 95th Vehicular Technology Conference . Helsinki: IEEE, 2022: 1-5.
[本文引用: 1]
[96]
SHI G, YAO C, WANG W, et al. Adaptive planar foot with compliant ankle joint and multi-modal sensing for quadruped robots [C]//IEEE International Conference on Robotics and Biomimetics . Xishuangbanna: IEEE, 2022: 52-57.
[本文引用: 1]
[97]
KOLVENBACH H, BARTSCHI C, WELLHAUSEN L, et al Haptic inspection of planetary soils with legged robots
[J]. IEEE Robotics and Automation Letters , 2019 , 4 (2 ): 1626 - 1632
DOI:10.1109/LRA.2019.2896732
[本文引用: 1]
[98]
CHUAH M Y M, EPSTEIN L, KIM D, et al. Bi-modal hemispherical sensor: a unifying solution for three axis force and contact angle measurement [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Macau: IEEE, 2019: 7968-7975.
[本文引用: 1]
[99]
CHILIAN A, HIRSCHMULLER H, GORNER M. Multisensor data fusion for robust pose estimation of a six-legged walking robot [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . San Francisco: IEEE, 2011: 2497-2504.
[本文引用: 1]
[100]
MA J, BAJRACHARYA M, SUSCA S, et al Real-time pose estimation of a dynamic quadruped in GPS-denied environments for 24-hour operation
[J]. The International Journal of Robotics Research , 2016 , 35 (6 ): 631 - 653
DOI:10.1177/0278364915587333
[本文引用: 1]
[101]
NOBILI S, CAMURRI M, BARASUOL V, et al. Heterogeneous sensor fusion for accurate state estimation of dynamic legged robots [C]//Robotics: Science and Systems . Cambridge: [s. n. ], 2017.
[本文引用: 1]
[23]
ALTENDORFER R, MOORE N, KOMSUOGLU H, et al Rhex: a biologically inspired hexapod runner
[J]. Autonomous Robots , 2001 , 11 (3 ): 207 - 213
DOI:10.1023/A:1012426720699
[本文引用: 3]
[24]
MICHAUD F, LETOURNEAU D, ARSENAULT M, et al Multi-modal locomotion robotic platform using leg-track-wheel articulations
[J]. Autonomous Robots , 2005 , 18 (2 ): 137 - 156
DOI:10.1007/s10514-005-0722-1
[本文引用: 1]
[25]
SANCHEZ C J, CHIU C W, ZHOU Y, et al Locomotion control of hybrid cockroach robots
[J]. Journal of the Royal Society Interface , 2015 , 12 (105 ): 20141363
DOI:10.1098/rsif.2014.1363
[本文引用: 1]
[26]
LUNECKAS M, LUNECKAS T, UDRIS D, et al A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots
[J]. Intelligent Service Robotics , 2021 , 14 : 9 - 24
[本文引用: 1]
[27]
DA X, XIE Z, HOELLER D, et al. Learning a contact-adaptive controller for robust, efficient legged locomotion [C]//Conference on Robot Learning . Cambridge: PMLR, 2021: 883-894.
[本文引用: 1]
[28]
JI Q, FU S, TAN K, et al Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning
[J]. Robotics and Computer-Integrated Manufacturing , 2022 , 78 : 102382
DOI:10.1016/j.rcim.2022.102382
[本文引用: 1]
[29]
MURALIDHARAN S T, ZHU R, JI Q, et al. A soft quadruped robot enabled by continuum actuators [C]//IEEE 17th International Conference on Automation Science and Engineering . Lyon: IEEE, 2021: 834-840.
[本文引用: 1]
[30]
PARK I W, KIM J Y, LEE J, et al Mechanical design of the humanoid robot platform, HUBO
[J]. Advanced Robotics , 2007 , 21 (11 ): 1305 - 1322
DOI:10.1163/156855307781503781
[本文引用: 2]
[31]
PARK I W, KIM J Y, LEE J, et al. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO) [C]//5th IEEE-RAS International Conference on Humanoid Robots . Tsukuba: IEEE, 2005: 321-326.
[本文引用: 2]
[32]
NIKONOVAS A, HARRISON A J L, HOULT S, et al The application of force-sensing resistor sensors for measuring forces developed by the human hand
[J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine , 2004 , 218 (2 ): 121 - 126
DOI:10.1243/095441104322984013
[本文引用: 2]
[33]
HOEPFLINGER M A, REMY C D, HUTTER M, et al. Haptic terrain classification for legged robots [C]//IEEE International Conference on Robotics and Automation . Anchorage: IEEE, 2010: 2828-2833.
[本文引用: 2]
[34]
WU X A, HUH T M, MUKHERJEE R, et al Integrated ground reaction force sensing and terrain classification for small legged robots
[J]. IEEE Robotics and Automation Letters , 2016 , 1 (2 ): 1125 - 1132
DOI:10.1109/LRA.2016.2524073
[本文引用: 2]
[35]
HUTTER M. StarlETH & Co. : design and control of legged robots with compliant actuation [D]. Zurich: Swiss Federal Institute of Technology Zurich, 2013.
[本文引用: 2]
[36]
CHUAH M Y, KIM S Enabling force sensing during ground locomotion: a bio-inspired, multi-axis, composite force sensor using discrete pressure mapping
[J]. IEEE Sensors Journal , 2014 , 14 (5 ): 1693 - 1703
DOI:10.1109/JSEN.2014.2299805
[本文引用: 3]
[37]
TOMO T P, SOMLOR S, SCHMITZ A, et al Design and characterization of a three-axis hall effect-based soft skin sensor
[J]. Sensors , 2016 , 16 (4 ): 491
DOI:10.3390/s16040491
[本文引用: 2]
[38]
KOCO E, MIRKOVIC D, KOVACIC Z Hybrid compliance control for locomotion of electrically actuated quadruped robot
[J]. Journal of Intelligent and Robotic Systems , 2019 , 94 (3 ): 537 - 563
[本文引用: 2]
[39]
YUAN W, DONG S, ADELSON E H Gelsight: high-resolution robot tactile sensors for estimating geometry and force
[J]. Sensors , 2017 , 17 (12 ): 2762
DOI:10.3390/s17122762
[本文引用: 1]
[40]
TENZER Y, JENTOFT L P, HOWE R D The feel of MEMS barometers: inexpensive and easily customized tactile array sensors
[J]. IEEE Robotics and Automation Magazine , 2014 , 21 (3 ): 89 - 95
DOI:10.1109/MRA.2014.2310152
[本文引用: 1]
[41]
GUGGENHEIM J W, JENTOFT L P, TENZER Y, et al Robust and inexpensive six-axis force–torque sensors using MEMS barometers
[J]. IEEE/ASME Transactions on Mechatronics , 2017 , 22 (2 ): 838 - 844
DOI:10.1109/TMECH.2017.2654446
[本文引用: 1]
[42]
ZU L, WEN J, WANG S, et al Multiangle, self-powered sensor array for monitoring head impacts
[J]. Science Advances , 2023 , 9 (20 ): 5152
DOI:10.1126/sciadv.adg5152
[本文引用: 3]
[43]
TALEBI S, POULAKAKIS I, PAPADOPOULOS E, et al. Quadruped robot running with a bounding gait [C]//Experimental Robotics VII . Hawaii: [s. n. ], 2001: 281-289.
[本文引用: 2]
[44]
NAM H, XU Q, HONG D. A reliable low-cost foot contact sensor for legged robots [C]//2020 17th International Conference on Ubiquitous Robots . Kyoto: IEEE, 2020: 219-224.
[本文引用: 3]
[45]
BLOESCH M, GEHRING C, FANKHAUSER P, et al. State estimation for legged robots on unstable and slippery terrain [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems . Tokyo: IEEE, 2013: 6058-6064.
[本文引用: 4]
[46]
FALLON M F, ANTONE M, ROY N, et al. Drift-free humanoid state estimation fusing kinematic, inertial and lidar sensing [C]//IEEE-RAS International Conference on Humanoid Robots . Madrid: IEEE, 2014: 112-119.
[本文引用: 2]
[47]
ROTELLA N, SCHAAL S, RIGHETTI L. Unsupervised contact learning for humanoid estimation and control [C]//IEEE International Conference on Robotics and Automation . Brisbane: IEEE, 2018: 411-417.
[本文引用: 3]
[48]
PIPERAKIS S, KOSKINOPOULOU M, TRAHANIAS P Nonlinear state estimation for humanoid robot walking
[J]. IEEE Robotics and Automation Letters , 2018 , 3 (4 ): 3347 - 3354
DOI:10.1109/LRA.2018.2852788
[本文引用: 2]
[49]
WANG R, ZHAO J, WANG J. Torque compensation model and touchdown detection model of the hydraulic quadruped robot controlled by VMC [C]//34th Chinese Control and Decision Conference . Hefei: IEEE, 2022: 3937-3943.
[本文引用: 2]
[50]
ORTENZI V, LIN H C, AZAD M, et al. Kinematics-based estimation of contact constraints using only proprioception [C]//2016 IEEE-RAS 16th International Conference on Humanoid Robots . Cancun: IEEE, 2016: 1304-1311.
[本文引用: 1]
[51]
BLOESCH M, HUTTER M, HOEPFLINGER M A, et al State estimation for legged robots-consistent fusion of leg kinematics and IMU
[J]. Robotics , 2013 , 17 : 17 - 24
[本文引用: 3]
[52]
HARTLEY R, GHAFFARI M, EUSTICE R M, et al Contact-aided invariant extended Kalman filtering for robot state estimation
[J]. The International Journal of Robotics Research , 2020 , 39 (4 ): 402 - 430
DOI:10.1177/0278364919894385
[本文引用: 2]
[53]
BLEDT G, WENSING P M, INGERSOLL S, et al. Contact model fusion for event-based locomotion in unstructured terrains [C]//IEEE International Conference on Robotics and Automation . Brisbane: IEEE, 2018: 4399-4406.
[本文引用: 2]
1
... Bledt等[53 ] 提出概率融合接触模型的方法,解决了动力学动态建模中存在不确定性现象的问题. 利用广义动量扰动观测器的离散扩展,以提高本体感受力控制估计的准确性,该算法利用基于事件的有限状态机来处理意外的过早和过晚触地. 这使得机器人可以根据估计的接触状态修改每条腿的控制动作,而不是不考虑实际接触状态而遵循严格的时间计划. 利用Cheetah 3机器人开展的实验表明,该方法的接触识别正确率高达99.3%. Gong等[54 ] 通过机载相机采集地面的图像,对采集的数据进行分析和计算,得到初步的机器人本体的速度和位置之后,再结合惯性测量单元信息,估计机器人的运动状态. Wang等[55 ] 提出利用速度测量来定位机器人本体感觉接触的运动学方法,使用粒子滤波器过滤掉估计过程中的多个候选接触点,减少接触位置的不确定性. Hwangbo等[56 ] 介绍具有隐马尔可夫模型的一维概率框架,该模型利用运动学、微分运动学和动力学来估计接触状态. 这种方法不依赖力/力矩传感器,有效地利用关节位置、速度和扭矩测量来估计GRF. Neunert等[57 ] 通过对机器人动力学进行阈值处理,从GRF推断出四足机器人的接触状态. ...
2
... Bledt等[53 ] 提出概率融合接触模型的方法,解决了动力学动态建模中存在不确定性现象的问题. 利用广义动量扰动观测器的离散扩展,以提高本体感受力控制估计的准确性,该算法利用基于事件的有限状态机来处理意外的过早和过晚触地. 这使得机器人可以根据估计的接触状态修改每条腿的控制动作,而不是不考虑实际接触状态而遵循严格的时间计划. 利用Cheetah 3机器人开展的实验表明,该方法的接触识别正确率高达99.3%. Gong等[54 ] 通过机载相机采集地面的图像,对采集的数据进行分析和计算,得到初步的机器人本体的速度和位置之后,再结合惯性测量单元信息,估计机器人的运动状态. Wang等[55 ] 提出利用速度测量来定位机器人本体感觉接触的运动学方法,使用粒子滤波器过滤掉估计过程中的多个候选接触点,减少接触位置的不确定性. Hwangbo等[56 ] 介绍具有隐马尔可夫模型的一维概率框架,该模型利用运动学、微分运动学和动力学来估计接触状态. 这种方法不依赖力/力矩传感器,有效地利用关节位置、速度和扭矩测量来估计GRF. Neunert等[57 ] 通过对机器人动力学进行阈值处理,从GRF推断出四足机器人的接触状态. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
2
... Bledt等[53 ] 提出概率融合接触模型的方法,解决了动力学动态建模中存在不确定性现象的问题. 利用广义动量扰动观测器的离散扩展,以提高本体感受力控制估计的准确性,该算法利用基于事件的有限状态机来处理意外的过早和过晚触地. 这使得机器人可以根据估计的接触状态修改每条腿的控制动作,而不是不考虑实际接触状态而遵循严格的时间计划. 利用Cheetah 3机器人开展的实验表明,该方法的接触识别正确率高达99.3%. Gong等[54 ] 通过机载相机采集地面的图像,对采集的数据进行分析和计算,得到初步的机器人本体的速度和位置之后,再结合惯性测量单元信息,估计机器人的运动状态. Wang等[55 ] 提出利用速度测量来定位机器人本体感觉接触的运动学方法,使用粒子滤波器过滤掉估计过程中的多个候选接触点,减少接触位置的不确定性. Hwangbo等[56 ] 介绍具有隐马尔可夫模型的一维概率框架,该模型利用运动学、微分运动学和动力学来估计接触状态. 这种方法不依赖力/力矩传感器,有效地利用关节位置、速度和扭矩测量来估计GRF. Neunert等[57 ] 通过对机器人动力学进行阈值处理,从GRF推断出四足机器人的接触状态. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
Trajectory optimization through contacts and automatic gait discovery for quadrupeds
2
2017
... Bledt等[53 ] 提出概率融合接触模型的方法,解决了动力学动态建模中存在不确定性现象的问题. 利用广义动量扰动观测器的离散扩展,以提高本体感受力控制估计的准确性,该算法利用基于事件的有限状态机来处理意外的过早和过晚触地. 这使得机器人可以根据估计的接触状态修改每条腿的控制动作,而不是不考虑实际接触状态而遵循严格的时间计划. 利用Cheetah 3机器人开展的实验表明,该方法的接触识别正确率高达99.3%. Gong等[54 ] 通过机载相机采集地面的图像,对采集的数据进行分析和计算,得到初步的机器人本体的速度和位置之后,再结合惯性测量单元信息,估计机器人的运动状态. Wang等[55 ] 提出利用速度测量来定位机器人本体感觉接触的运动学方法,使用粒子滤波器过滤掉估计过程中的多个候选接触点,减少接触位置的不确定性. Hwangbo等[56 ] 介绍具有隐马尔可夫模型的一维概率框架,该模型利用运动学、微分运动学和动力学来估计接触状态. 这种方法不依赖力/力矩传感器,有效地利用关节位置、速度和扭矩测量来估计GRF. Neunert等[57 ] 通过对机器人动力学进行阈值处理,从GRF推断出四足机器人的接触状态. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
2
... 当代基于学习的方法在实践中已被证明是有效的,Huynh等[58 ] 设计人工神经网络模型来预测腿在轨迹中瞬时位置的电机转矩,不使用复杂的运动学和动力学运动模型. 在轨迹中使用无迹卡尔曼滤波器来平滑处理测量值. 基于预测信息和滤波值之间的差异,估计机器人脚与障碍物碰撞的状态和强度. Camurri等[59 ] 展示了监督学习框架,该框架采用逻辑回归估计四足机器人的接触概率. 该框架主要利用动力学、关节位置和扭矩测量值来估计GRF,对不同类型步态的不同GRF阈值进行编码训练,使用该方法进行小跑实验的机器人的速度均方根误差只有0.016 m/s. 类似地,Lin等[60 ] 开发基于深度学习的接触估计器,该估计器使用本体感觉数据作为输入,将个体接触分类为二元状态. 结果表明,分类精度很高,单腿的准确率可达97.82%,但该框架与特定的机器人和控制器相结合,若没有新的地面实况标记数据,则无法推广到不同的平台. 最近,Piperakis等[61 ] 提出无监督学习框架,称为步态相位估计模块(gait-phase estimation module,GEM),该框架主要进行了对本体传感器数据的线性降维和在潜在空间中通过聚类推断触地概率,利用模拟的Valkyrie机器人证明了在该学习框架下行走的高精度性,在60 s的步态中,x、y 、z 的位置均方根误差分别为0.024 5、0.010 1、0.0123 m,x 、y 、z 轴的方位均方根误差分别为0.7058°、1.2035°、1.8426°. 除了监督及无监督学习2种学习框架外,Nahrendra等[62 ] 利用深度强化学习算法训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,如高度图、摩擦和障碍. ...
... 根据接触力获取方法的不同,分为通过足端传感器直接获取以及通过本体传感器间接估算获取这2种方法. 为了保证机器人能够实现更加可靠的触地检测,保障机器人行走的稳定性,机器人在触地检测过程中,会融合其他的传感器,如IMU、视觉传感器、雷达等. 最初,基于卡尔曼滤波器的该传感器融合IMU表现良好,因为该传感器不容易发生失效情况而得到快速的发展,但是随着力传感器技术的发展,传感器的精度、分辨率、响应速度、耐用性都有很大的提高,传感器的成本有所下降. 现在无论是基于足端传感器的直接获取接触力的方法还是基于本体传感器间接估算接触力的方法都得到了研究人员的重视,多传感器融合技术在2种方法中都得到了不错的发展. 随着机器学习技术的出现,触地检测的技术得到了新的发展,如通过人工神经网络预测腿在轨迹中瞬时位置的电机转矩[58 ] ,利用监督学习来估计四足机器人的接触概率[59 ] ,基于深度学习的接触估计器将机器人的接触进行二元化分类[60 ] . 获取的接触力数据可以作为机器学习的数据库,例如Camurri等[59 ] 使用一维逻辑回归框架学习接触力的阈值. 强化学习通过机器人与环境的不断交互来获取最大奖励,完成学习目标,因此触地检测在算法中没有作为明确的设计目标,但是强化学习在保证机器人行走过程中的稳定性的时候,间接保证了可靠的触地检测. ...
Probabilistic contact estimation and impact detection for state estimation of quadruped robots
4
2017
... 当代基于学习的方法在实践中已被证明是有效的,Huynh等[58 ] 设计人工神经网络模型来预测腿在轨迹中瞬时位置的电机转矩,不使用复杂的运动学和动力学运动模型. 在轨迹中使用无迹卡尔曼滤波器来平滑处理测量值. 基于预测信息和滤波值之间的差异,估计机器人脚与障碍物碰撞的状态和强度. Camurri等[59 ] 展示了监督学习框架,该框架采用逻辑回归估计四足机器人的接触概率. 该框架主要利用动力学、关节位置和扭矩测量值来估计GRF,对不同类型步态的不同GRF阈值进行编码训练,使用该方法进行小跑实验的机器人的速度均方根误差只有0.016 m/s. 类似地,Lin等[60 ] 开发基于深度学习的接触估计器,该估计器使用本体感觉数据作为输入,将个体接触分类为二元状态. 结果表明,分类精度很高,单腿的准确率可达97.82%,但该框架与特定的机器人和控制器相结合,若没有新的地面实况标记数据,则无法推广到不同的平台. 最近,Piperakis等[61 ] 提出无监督学习框架,称为步态相位估计模块(gait-phase estimation module,GEM),该框架主要进行了对本体传感器数据的线性降维和在潜在空间中通过聚类推断触地概率,利用模拟的Valkyrie机器人证明了在该学习框架下行走的高精度性,在60 s的步态中,x、y 、z 的位置均方根误差分别为0.024 5、0.010 1、0.0123 m,x 、y 、z 轴的方位均方根误差分别为0.7058°、1.2035°、1.8426°. 除了监督及无监督学习2种学习框架外,Nahrendra等[62 ] 利用深度强化学习算法训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,如高度图、摩擦和障碍. ...
... 机器学习技术在足式机器人触地检测中的应用将更加广泛. 通过学习大量的数据样本,机器可以自动识别和分析不同地形和接触情况下的触地特征,生成相应的触地检测算法. 利用这种基于机器学习的方法,可以提高检测的准确性和鲁棒性. Camurri等[59 ] 使用一维逻辑回归框架,指定每种步态类型的动态GRF阈值. 该学习的阈值仅应用于垂直GRF,在假设有足够的摩擦力以防止滑动的情况下,忽略其他组件. Lin等[60 ] 介绍了深度卷积神经网络,该网络利用IMU和联合编码器,将单个触点分类为稳定和不稳定触点,在迷你猎豹机器人上进行评估,并在不同的地形上进行测试,总体准确率为97%. 深度强化学习作为新型的控制方法,无需大量的计算和精确的参数设计,机器人可以在与环境的交互中学习运动策略,因此更具有适应性和通用性,可以根据不同的任务设置学习到多种运动控制策略. Nahrendra等[62 ] 利用深度强化学习算法,训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,从而可以调整步态,安全地通过各种地形. ...
... 根据接触力获取方法的不同,分为通过足端传感器直接获取以及通过本体传感器间接估算获取这2种方法. 为了保证机器人能够实现更加可靠的触地检测,保障机器人行走的稳定性,机器人在触地检测过程中,会融合其他的传感器,如IMU、视觉传感器、雷达等. 最初,基于卡尔曼滤波器的该传感器融合IMU表现良好,因为该传感器不容易发生失效情况而得到快速的发展,但是随着力传感器技术的发展,传感器的精度、分辨率、响应速度、耐用性都有很大的提高,传感器的成本有所下降. 现在无论是基于足端传感器的直接获取接触力的方法还是基于本体传感器间接估算接触力的方法都得到了研究人员的重视,多传感器融合技术在2种方法中都得到了不错的发展. 随着机器学习技术的出现,触地检测的技术得到了新的发展,如通过人工神经网络预测腿在轨迹中瞬时位置的电机转矩[58 ] ,利用监督学习来估计四足机器人的接触概率[59 ] ,基于深度学习的接触估计器将机器人的接触进行二元化分类[60 ] . 获取的接触力数据可以作为机器学习的数据库,例如Camurri等[59 ] 使用一维逻辑回归框架学习接触力的阈值. 强化学习通过机器人与环境的不断交互来获取最大奖励,完成学习目标,因此触地检测在算法中没有作为明确的设计目标,但是强化学习在保证机器人行走过程中的稳定性的时候,间接保证了可靠的触地检测. ...
... [59 ]使用一维逻辑回归框架学习接触力的阈值. 强化学习通过机器人与环境的不断交互来获取最大奖励,完成学习目标,因此触地检测在算法中没有作为明确的设计目标,但是强化学习在保证机器人行走过程中的稳定性的时候,间接保证了可靠的触地检测. ...
4
... 当代基于学习的方法在实践中已被证明是有效的,Huynh等[58 ] 设计人工神经网络模型来预测腿在轨迹中瞬时位置的电机转矩,不使用复杂的运动学和动力学运动模型. 在轨迹中使用无迹卡尔曼滤波器来平滑处理测量值. 基于预测信息和滤波值之间的差异,估计机器人脚与障碍物碰撞的状态和强度. Camurri等[59 ] 展示了监督学习框架,该框架采用逻辑回归估计四足机器人的接触概率. 该框架主要利用动力学、关节位置和扭矩测量值来估计GRF,对不同类型步态的不同GRF阈值进行编码训练,使用该方法进行小跑实验的机器人的速度均方根误差只有0.016 m/s. 类似地,Lin等[60 ] 开发基于深度学习的接触估计器,该估计器使用本体感觉数据作为输入,将个体接触分类为二元状态. 结果表明,分类精度很高,单腿的准确率可达97.82%,但该框架与特定的机器人和控制器相结合,若没有新的地面实况标记数据,则无法推广到不同的平台. 最近,Piperakis等[61 ] 提出无监督学习框架,称为步态相位估计模块(gait-phase estimation module,GEM),该框架主要进行了对本体传感器数据的线性降维和在潜在空间中通过聚类推断触地概率,利用模拟的Valkyrie机器人证明了在该学习框架下行走的高精度性,在60 s的步态中,x、y 、z 的位置均方根误差分别为0.024 5、0.010 1、0.0123 m,x 、y 、z 轴的方位均方根误差分别为0.7058°、1.2035°、1.8426°. 除了监督及无监督学习2种学习框架外,Nahrendra等[62 ] 利用深度强化学习算法训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,如高度图、摩擦和障碍. ...
... 如地下矿山或下水道,机器人很难连续操作,因为外部传感器可能会因雾、黑暗、污垢或故障而失效. 为了在这种情况下实现自主导航,可以利用机器人本体感觉进行定位,在没有任何相机或激光雷达传感器帮助的情况下,根据先前的环境地图进行定位. Buchanan等[91 ] 提出基于序列蒙特卡罗方法的四足机器人6自由度(degree of freedom,DOF)定位算法,在给定姿势、关节运动学和足部接触状态的情况下,能够识别出机器人在先前地图中最可能的位置及过去的轨迹. Wisth等[92 ] 使用本体感觉传感器,例如惯性测量单元(IMU)、编码器和扭矩传感器来完成触地检测,通过接触辅助不变扩展卡尔曼滤波器生成准确的里程计轨迹,构建稳健的本体感觉里程计. Lin等[60 ] 设计基于深度学习的接触估计器,该估计器不需要专用传感器,而是使用关节编码器、运动学和IMU数据. 使用MiniCheetah[11 ] 在8个不同的地形上创建接触数据集. 部署接触估计器和接触辅助不变扩展卡尔曼滤波器(IEKF),实验表明,由此产生的里程计轨迹与最先进的视觉SLAM算法相当. ...
... 机器学习技术在足式机器人触地检测中的应用将更加广泛. 通过学习大量的数据样本,机器可以自动识别和分析不同地形和接触情况下的触地特征,生成相应的触地检测算法. 利用这种基于机器学习的方法,可以提高检测的准确性和鲁棒性. Camurri等[59 ] 使用一维逻辑回归框架,指定每种步态类型的动态GRF阈值. 该学习的阈值仅应用于垂直GRF,在假设有足够的摩擦力以防止滑动的情况下,忽略其他组件. Lin等[60 ] 介绍了深度卷积神经网络,该网络利用IMU和联合编码器,将单个触点分类为稳定和不稳定触点,在迷你猎豹机器人上进行评估,并在不同的地形上进行测试,总体准确率为97%. 深度强化学习作为新型的控制方法,无需大量的计算和精确的参数设计,机器人可以在与环境的交互中学习运动策略,因此更具有适应性和通用性,可以根据不同的任务设置学习到多种运动控制策略. Nahrendra等[62 ] 利用深度强化学习算法,训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,从而可以调整步态,安全地通过各种地形. ...
... 根据接触力获取方法的不同,分为通过足端传感器直接获取以及通过本体传感器间接估算获取这2种方法. 为了保证机器人能够实现更加可靠的触地检测,保障机器人行走的稳定性,机器人在触地检测过程中,会融合其他的传感器,如IMU、视觉传感器、雷达等. 最初,基于卡尔曼滤波器的该传感器融合IMU表现良好,因为该传感器不容易发生失效情况而得到快速的发展,但是随着力传感器技术的发展,传感器的精度、分辨率、响应速度、耐用性都有很大的提高,传感器的成本有所下降. 现在无论是基于足端传感器的直接获取接触力的方法还是基于本体传感器间接估算接触力的方法都得到了研究人员的重视,多传感器融合技术在2种方法中都得到了不错的发展. 随着机器学习技术的出现,触地检测的技术得到了新的发展,如通过人工神经网络预测腿在轨迹中瞬时位置的电机转矩[58 ] ,利用监督学习来估计四足机器人的接触概率[59 ] ,基于深度学习的接触估计器将机器人的接触进行二元化分类[60 ] . 获取的接触力数据可以作为机器学习的数据库,例如Camurri等[59 ] 使用一维逻辑回归框架学习接触力的阈值. 强化学习通过机器人与环境的不断交互来获取最大奖励,完成学习目标,因此触地检测在算法中没有作为明确的设计目标,但是强化学习在保证机器人行走过程中的稳定性的时候,间接保证了可靠的触地检测. ...
2
... 当代基于学习的方法在实践中已被证明是有效的,Huynh等[58 ] 设计人工神经网络模型来预测腿在轨迹中瞬时位置的电机转矩,不使用复杂的运动学和动力学运动模型. 在轨迹中使用无迹卡尔曼滤波器来平滑处理测量值. 基于预测信息和滤波值之间的差异,估计机器人脚与障碍物碰撞的状态和强度. Camurri等[59 ] 展示了监督学习框架,该框架采用逻辑回归估计四足机器人的接触概率. 该框架主要利用动力学、关节位置和扭矩测量值来估计GRF,对不同类型步态的不同GRF阈值进行编码训练,使用该方法进行小跑实验的机器人的速度均方根误差只有0.016 m/s. 类似地,Lin等[60 ] 开发基于深度学习的接触估计器,该估计器使用本体感觉数据作为输入,将个体接触分类为二元状态. 结果表明,分类精度很高,单腿的准确率可达97.82%,但该框架与特定的机器人和控制器相结合,若没有新的地面实况标记数据,则无法推广到不同的平台. 最近,Piperakis等[61 ] 提出无监督学习框架,称为步态相位估计模块(gait-phase estimation module,GEM),该框架主要进行了对本体传感器数据的线性降维和在潜在空间中通过聚类推断触地概率,利用模拟的Valkyrie机器人证明了在该学习框架下行走的高精度性,在60 s的步态中,x、y 、z 的位置均方根误差分别为0.024 5、0.010 1、0.0123 m,x 、y 、z 轴的方位均方根误差分别为0.7058°、1.2035°、1.8426°. 除了监督及无监督学习2种学习框架外,Nahrendra等[62 ] 利用深度强化学习算法训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,如高度图、摩擦和障碍. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
3
... 当代基于学习的方法在实践中已被证明是有效的,Huynh等[58 ] 设计人工神经网络模型来预测腿在轨迹中瞬时位置的电机转矩,不使用复杂的运动学和动力学运动模型. 在轨迹中使用无迹卡尔曼滤波器来平滑处理测量值. 基于预测信息和滤波值之间的差异,估计机器人脚与障碍物碰撞的状态和强度. Camurri等[59 ] 展示了监督学习框架,该框架采用逻辑回归估计四足机器人的接触概率. 该框架主要利用动力学、关节位置和扭矩测量值来估计GRF,对不同类型步态的不同GRF阈值进行编码训练,使用该方法进行小跑实验的机器人的速度均方根误差只有0.016 m/s. 类似地,Lin等[60 ] 开发基于深度学习的接触估计器,该估计器使用本体感觉数据作为输入,将个体接触分类为二元状态. 结果表明,分类精度很高,单腿的准确率可达97.82%,但该框架与特定的机器人和控制器相结合,若没有新的地面实况标记数据,则无法推广到不同的平台. 最近,Piperakis等[61 ] 提出无监督学习框架,称为步态相位估计模块(gait-phase estimation module,GEM),该框架主要进行了对本体传感器数据的线性降维和在潜在空间中通过聚类推断触地概率,利用模拟的Valkyrie机器人证明了在该学习框架下行走的高精度性,在60 s的步态中,x、y 、z 的位置均方根误差分别为0.024 5、0.010 1、0.0123 m,x 、y 、z 轴的方位均方根误差分别为0.7058°、1.2035°、1.8426°. 除了监督及无监督学习2种学习框架外,Nahrendra等[62 ] 利用深度强化学习算法训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,如高度图、摩擦和障碍. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
... 机器学习技术在足式机器人触地检测中的应用将更加广泛. 通过学习大量的数据样本,机器可以自动识别和分析不同地形和接触情况下的触地特征,生成相应的触地检测算法. 利用这种基于机器学习的方法,可以提高检测的准确性和鲁棒性. Camurri等[59 ] 使用一维逻辑回归框架,指定每种步态类型的动态GRF阈值. 该学习的阈值仅应用于垂直GRF,在假设有足够的摩擦力以防止滑动的情况下,忽略其他组件. Lin等[60 ] 介绍了深度卷积神经网络,该网络利用IMU和联合编码器,将单个触点分类为稳定和不稳定触点,在迷你猎豹机器人上进行评估,并在不同的地形上进行测试,总体准确率为97%. 深度强化学习作为新型的控制方法,无需大量的计算和精确的参数设计,机器人可以在与环境的交互中学习运动策略,因此更具有适应性和通用性,可以根据不同的任务设置学习到多种运动控制策略. Nahrendra等[62 ] 利用深度强化学习算法,训练了仅具有本体感觉的四足机器人的鲁棒运动策略,隐式地推断地形属性,从而可以调整步态,安全地通过各种地形. ...
Slip-adaptive walk of quadruped robot
1
2005
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
Slip detection and recovery for quadruped robots
1
2018
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
1
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
A survey of the development of quadruped robots: joint configuration, dynamic locomotion control method and mobile manipulation approach
1
2022
... 近年来,随着机器人技术的不断进步,人们对机器人的要求日益提高,不仅需要适应简单结构化的环境,更需要应对复杂崎岖的非结构化地面环境. 非结构化地面环境占陆地的将近一半,例如山地、草地、沙漠等,且这些地形对于轮式和履带式机器人来说难以轻松到达,足式机器人利用独立的支撑来代替轮式及履带式机器人所需的连续支撑,能够改变自身步态、姿态及落足点,可以较容易地穿越这些非结构地形,从而实现行走、越障功能,可以满足人们对工业巡检、灾难搜寻、野外探险乃至外星球探测等需求[1 ] . ...
1
... 足式机器人触地检测的方法主要分为利用外部传感器直接检测、利用本体传感器间接判断触地状态两大类. 前者主要利用安装在足端的力传感器来采集力学数据[2 ] ,直接感知触地情况;后者主要通过本体传感器(电机的编码器及IMU)获取的数据进行运动学及动力学分析,估计足端力,间接获取机器人的触地信息[3 ] . 本文主要回顾了足式机器人触地检测的经典方法,总结了触地检测方法的最新进展与成果,介绍了在湿滑地面、松散的颗粒状地面及非足端触地特殊场景下的触地检测策略,也介绍了触地检测技术在足式机器人领域中运动控制的需要、导航中的应用、地形与地质的感知这三大应用场景,总结了触地检测技术在硬件改进和集成、多模态触地检测、多传感器融合化触地检测及智能化触地检测4个方面的发展趋势. ...
Shearing force measurement device with a built-in integrated micro displacement sensor
1
2015
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
Dynamic locomotion on slippery ground
1
2019
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
1
... 机器人在松散地面触地行走时,不但存在滑移的风险,而且存在足端下沉的风险. SpaceBok[68 ] 提供了出色的动态机动,已被证明可在沙质地形下正常工作. Shirwatkar等[69 ] 利用Nvidia的IsaacGym[70 ] 和Bekker模型的子程序[71 ] ,模拟砂土接触的相互作用,在该过程中没有专注于下沉分析,而是专注于滑移分析,保证机器人在松散的地面上正常工作. Hulas等[72 ] 通过建立非线性接触模型,使得足端具备穿透性,可以较准确地判断足端的实际触地情况. 非线性接触模型中的接触力函数$ {F_n} $ $ z $ $ \dot z $
1
... 机器人在松散地面触地行走时,不但存在滑移的风险,而且存在足端下沉的风险. SpaceBok[68 ] 提供了出色的动态机动,已被证明可在沙质地形下正常工作. Shirwatkar等[69 ] 利用Nvidia的IsaacGym[70 ] 和Bekker模型的子程序[71 ] ,模拟砂土接触的相互作用,在该过程中没有专注于下沉分析,而是专注于滑移分析,保证机器人在松散的地面上正常工作. Hulas等[72 ] 通过建立非线性接触模型,使得足端具备穿透性,可以较准确地判断足端的实际触地情况. 非线性接触模型中的接触力函数$ {F_n} $ $ z $ $ \dot z $
1
... 机器人在松散地面触地行走时,不但存在滑移的风险,而且存在足端下沉的风险. SpaceBok[68 ] 提供了出色的动态机动,已被证明可在沙质地形下正常工作. Shirwatkar等[69 ] 利用Nvidia的IsaacGym[70 ] 和Bekker模型的子程序[71 ] ,模拟砂土接触的相互作用,在该过程中没有专注于下沉分析,而是专注于滑移分析,保证机器人在松散的地面上正常工作. Hulas等[72 ] 通过建立非线性接触模型,使得足端具备穿透性,可以较准确地判断足端的实际触地情况. 非线性接触模型中的接触力函数$ {F_n} $ $ z $ $ \dot z $
1
... 机器人在松散地面触地行走时,不但存在滑移的风险,而且存在足端下沉的风险. SpaceBok[68 ] 提供了出色的动态机动,已被证明可在沙质地形下正常工作. Shirwatkar等[69 ] 利用Nvidia的IsaacGym[70 ] 和Bekker模型的子程序[71 ] ,模拟砂土接触的相互作用,在该过程中没有专注于下沉分析,而是专注于滑移分析,保证机器人在松散的地面上正常工作. Hulas等[72 ] 通过建立非线性接触模型,使得足端具备穿透性,可以较准确地判断足端的实际触地情况. 非线性接触模型中的接触力函数$ {F_n} $ $ z $ $ \dot z $
1
... 机器人在松散地面触地行走时,不但存在滑移的风险,而且存在足端下沉的风险. SpaceBok[68 ] 提供了出色的动态机动,已被证明可在沙质地形下正常工作. Shirwatkar等[69 ] 利用Nvidia的IsaacGym[70 ] 和Bekker模型的子程序[71 ] ,模拟砂土接触的相互作用,在该过程中没有专注于下沉分析,而是专注于滑移分析,保证机器人在松散的地面上正常工作. Hulas等[72 ] 通过建立非线性接触模型,使得足端具备穿透性,可以较准确地判断足端的实际触地情况. 非线性接触模型中的接触力函数$ {F_n} $ $ z $ $ \dot z $
1
... 式中:$ k $ [73 ] ,$ c $ [74 ] ;$ n $ $ k $
Robophysical study of jumping dynamics on granular media
1
2016
... 式中:$ k $ [73 ] ,$ c $ [74 ] ;$ n $ $ k $
Analysis of Mars Exploration Rover wheel mobility processes and the limitations of classical terramechanics models using discrete element method simulations
1
2017
... 对于$ k $ $ c $ [75 ] . ...
1
... 足式机器人触地检测的方法主要分为利用外部传感器直接检测、利用本体传感器间接判断触地状态两大类. 前者主要利用安装在足端的力传感器来采集力学数据[2 ] ,直接感知触地情况;后者主要通过本体传感器(电机的编码器及IMU)获取的数据进行运动学及动力学分析,估计足端力,间接获取机器人的触地信息[3 ] . 本文主要回顾了足式机器人触地检测的经典方法,总结了触地检测方法的最新进展与成果,介绍了在湿滑地面、松散的颗粒状地面及非足端触地特殊场景下的触地检测策略,也介绍了触地检测技术在足式机器人领域中运动控制的需要、导航中的应用、地形与地质的感知这三大应用场景,总结了触地检测技术在硬件改进和集成、多模态触地检测、多传感器融合化触地检测及智能化触地检测4个方面的发展趋势. ...
4
... BigDog[4 ] 是典型的液压四足机器人,如图1 (a)所示,其配备的弹性高度可调的液压伸缩腿可以帮助机器人适应不同的地形和行走姿势,提供稳定的支撑. 足端配备的弹簧减震系统可以提高柔顺性,帮助机器人与地面更稳定地接触,有利于足端力传感器的精确检测. Cheetah 3[5 ] 是具有代表性的无足端传感器的电机狗,如图1 (b)所示,腿部为串联式结构,且大小腿电机都安装在腿部上端,小腿通过传动机构间接驱动,又由于腿部质量进行轻量化设计,腿部总质量占机器人总质量的不到10%,在设计控制模型的时候可以忽略不计,将接触力直接等效地施加在机器人质心处,为后续的基于力估计的力优化提供了简化模型. ANYmal[6 ] 是另外一款电机狗,如图1 (c)所示,腿部为串联式结构,但与Cheetah 3不同,大小电机都分别直接驱动大小腿,没有中间传动部分,可以提高机器人的响应速度,也可以减少机械损失,提高机器人的能效. 电机安装在小腿关节处,可以降低机器人的重心,提供更稳定的支撑基础. Minitaur[7 ] 是并联式电机狗,如图1 (d)所示,与ANYmal相似,Minitaur的并联腿相对应的杆件由电机直接驱动. Minitaur腿部是并联结构,两电动机可以充当传感器,让它们感觉自己接触到地面,也可以像弹簧阻尼器系统一样工作,因此虽然腿是刚性的,但是机器人还是有弹力的,保证了机器人的柔顺性. ...
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
1
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
1
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
1
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
2
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
... [79 -80 ]依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
2
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
... -80 ]依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
1
... 足式机器人在穿越非结构化地形时很可能发生意外碰撞. 在意外情况下,不能保证机器人与环境的交互仅发生在末端执行器处,因此为了实现鲁棒运动,检测意外碰撞位置并将其用作稳定躯干控制器的反馈是很重要的. 有些方法结合力/力矩传感器与分布式皮肤,捕捉施加到任意位置的外力[76 ] . 大多数机器人都没有这种类型的传感器,因为它们显著增大了机器人的复杂性. 检测和估计外力的其他方法是基于广义动量(generalized momentum,GM)[77 ] 的基于模型的观测器. 这些方法的基本思想是将计算的转矩与实际转矩进行比较,推断外力的作用. 它们的优点是只需要本体感觉测量(扭矩和编码器测量),不需要额外的力传感器. De Luca等[78 ] 提出能够同时检测碰撞、找到接触链路(而不是接触位置)和估计外力的方法. 大多数GM方法仅适用于固定基座机器人. Vorndamme等[79 ] 开发用于浮动基座机器人(类人机器人)的方法,他们将GM方法与基于力/力矩传感器的方法进行组合和比较. 除了接触隔离外,一些方法试图以增大复杂性为代价来估计接触位置,Manuelli等[80 ] 提出基于粒子滤波器的优化方法,仅使用本体感觉传感器来检测和定位人形机器人上的多个接触. 通常,大多数基于本体感觉测量的方法无法确定最远端连接上的确切接触位置. Vorndamme等[79 -80 ] 依赖于非常精确的机器人模型,实现接触位置的确定,并仅在模拟环境中,对静止的机器人施加外力的方式得到了验证. Barasuol等[81 ] 提出运动学策略来定位小腿上的碰撞,利用表面倾角和摩擦系数的信息来产生与摩擦锥相关的地面反作用力,建立虚拟胫骨传感器的信息来更新力雅克比矩阵、摩擦系数和摩擦锥的方向,确定实际小腿的碰撞位置. ...
Static tip-over stability analysis for a robotic vehicle with a single-axle trailer on slopes based on altered supporting polygons
1
2012
... 足式机器人触地检测技术在机器人运动控制中起到非常重要的作用,尤其是机器人的运动稳定性,针对足式机器人,常用的运动稳定性评估方法主要包括静态稳定性和动态稳定性评估,这2种稳定性评估与环境参数之间有密切联系. 静态稳定性评估一般只适用于地形坡度小、地形不平度小以及地表摩擦力大的较理想的平面,动态稳定性评估在适应静态稳定性评估的同时,可以满足地形更加复杂的地面. 常见的静态稳定性评估有重心投影法(center of gravity projection method,CGPM)[82 ] 、静态稳定边界法(static stability margin, SSM)[83 ] 及能量稳定边界法(energy stabilitymargin,ESM)[84 ] . 常见的动态稳定性评估有零力矩点法(zero moment point,ZMP)[85 ] ,该方法认为若地面上存在重力、外力和惯性力对该点的合力矩为零的点,该点称为零力矩点,若ZMP在支撑区域内,则机器人是稳定的. 压力中心法(center of pressure,COP)[86 ] 是基于合外力与支撑多边形几何关系的判定方法. 该方法计算质心沿合力方向到支撑平面的投影,若该投影在支撑平面多边形内,则处于稳定状态. 由于静态稳定性评估大多数都是基于偏理想化的条件总结出来的,且大部分只适用于较规整的地面,相对动态稳定性评估用得少. 下面重点介绍动态稳定性评估与运动控制以及触地检测技术的关系. ...
Rolling stability enhancement via balancing tail for a water-running robot
1
2015
... 足式机器人触地检测技术在机器人运动控制中起到非常重要的作用,尤其是机器人的运动稳定性,针对足式机器人,常用的运动稳定性评估方法主要包括静态稳定性和动态稳定性评估,这2种稳定性评估与环境参数之间有密切联系. 静态稳定性评估一般只适用于地形坡度小、地形不平度小以及地表摩擦力大的较理想的平面,动态稳定性评估在适应静态稳定性评估的同时,可以满足地形更加复杂的地面. 常见的静态稳定性评估有重心投影法(center of gravity projection method,CGPM)[82 ] 、静态稳定边界法(static stability margin, SSM)[83 ] 及能量稳定边界法(energy stabilitymargin,ESM)[84 ] . 常见的动态稳定性评估有零力矩点法(zero moment point,ZMP)[85 ] ,该方法认为若地面上存在重力、外力和惯性力对该点的合力矩为零的点,该点称为零力矩点,若ZMP在支撑区域内,则机器人是稳定的. 压力中心法(center of pressure,COP)[86 ] 是基于合外力与支撑多边形几何关系的判定方法. 该方法计算质心沿合力方向到支撑平面的投影,若该投影在支撑平面多边形内,则处于稳定状态. 由于静态稳定性评估大多数都是基于偏理想化的条件总结出来的,且大部分只适用于较规整的地面,相对动态稳定性评估用得少. 下面重点介绍动态稳定性评估与运动控制以及触地检测技术的关系. ...
1
... 足式机器人触地检测技术在机器人运动控制中起到非常重要的作用,尤其是机器人的运动稳定性,针对足式机器人,常用的运动稳定性评估方法主要包括静态稳定性和动态稳定性评估,这2种稳定性评估与环境参数之间有密切联系. 静态稳定性评估一般只适用于地形坡度小、地形不平度小以及地表摩擦力大的较理想的平面,动态稳定性评估在适应静态稳定性评估的同时,可以满足地形更加复杂的地面. 常见的静态稳定性评估有重心投影法(center of gravity projection method,CGPM)[82 ] 、静态稳定边界法(static stability margin, SSM)[83 ] 及能量稳定边界法(energy stabilitymargin,ESM)[84 ] . 常见的动态稳定性评估有零力矩点法(zero moment point,ZMP)[85 ] ,该方法认为若地面上存在重力、外力和惯性力对该点的合力矩为零的点,该点称为零力矩点,若ZMP在支撑区域内,则机器人是稳定的. 压力中心法(center of pressure,COP)[86 ] 是基于合外力与支撑多边形几何关系的判定方法. 该方法计算质心沿合力方向到支撑平面的投影,若该投影在支撑平面多边形内,则处于稳定状态. 由于静态稳定性评估大多数都是基于偏理想化的条件总结出来的,且大部分只适用于较规整的地面,相对动态稳定性评估用得少. 下面重点介绍动态稳定性评估与运动控制以及触地检测技术的关系. ...
Energy-efficient bio-inspired gait planning and control for biped robot based on human locomotion analysis
1
2016
... 足式机器人触地检测技术在机器人运动控制中起到非常重要的作用,尤其是机器人的运动稳定性,针对足式机器人,常用的运动稳定性评估方法主要包括静态稳定性和动态稳定性评估,这2种稳定性评估与环境参数之间有密切联系. 静态稳定性评估一般只适用于地形坡度小、地形不平度小以及地表摩擦力大的较理想的平面,动态稳定性评估在适应静态稳定性评估的同时,可以满足地形更加复杂的地面. 常见的静态稳定性评估有重心投影法(center of gravity projection method,CGPM)[82 ] 、静态稳定边界法(static stability margin, SSM)[83 ] 及能量稳定边界法(energy stabilitymargin,ESM)[84 ] . 常见的动态稳定性评估有零力矩点法(zero moment point,ZMP)[85 ] ,该方法认为若地面上存在重力、外力和惯性力对该点的合力矩为零的点,该点称为零力矩点,若ZMP在支撑区域内,则机器人是稳定的. 压力中心法(center of pressure,COP)[86 ] 是基于合外力与支撑多边形几何关系的判定方法. 该方法计算质心沿合力方向到支撑平面的投影,若该投影在支撑平面多边形内,则处于稳定状态. 由于静态稳定性评估大多数都是基于偏理想化的条件总结出来的,且大部分只适用于较规整的地面,相对动态稳定性评估用得少. 下面重点介绍动态稳定性评估与运动控制以及触地检测技术的关系. ...
4
... BigDog[4 ] 是典型的液压四足机器人,如图1 (a)所示,其配备的弹性高度可调的液压伸缩腿可以帮助机器人适应不同的地形和行走姿势,提供稳定的支撑. 足端配备的弹簧减震系统可以提高柔顺性,帮助机器人与地面更稳定地接触,有利于足端力传感器的精确检测. Cheetah 3[5 ] 是具有代表性的无足端传感器的电机狗,如图1 (b)所示,腿部为串联式结构,且大小腿电机都安装在腿部上端,小腿通过传动机构间接驱动,又由于腿部质量进行轻量化设计,腿部总质量占机器人总质量的不到10%,在设计控制模型的时候可以忽略不计,将接触力直接等效地施加在机器人质心处,为后续的基于力估计的力优化提供了简化模型. ANYmal[6 ] 是另外一款电机狗,如图1 (c)所示,腿部为串联式结构,但与Cheetah 3不同,大小电机都分别直接驱动大小腿,没有中间传动部分,可以提高机器人的响应速度,也可以减少机械损失,提高机器人的能效. 电机安装在小腿关节处,可以降低机器人的重心,提供更稳定的支撑基础. Minitaur[7 ] 是并联式电机狗,如图1 (d)所示,与ANYmal相似,Minitaur的并联腿相对应的杆件由电机直接驱动. Minitaur腿部是并联结构,两电动机可以充当传感器,让它们感觉自己接触到地面,也可以像弹簧阻尼器系统一样工作,因此虽然腿是刚性的,但是机器人还是有弹力的,保证了机器人的柔顺性. ...
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
5
... BigDog[4 ] 是典型的液压四足机器人,如图1 (a)所示,其配备的弹性高度可调的液压伸缩腿可以帮助机器人适应不同的地形和行走姿势,提供稳定的支撑. 足端配备的弹簧减震系统可以提高柔顺性,帮助机器人与地面更稳定地接触,有利于足端力传感器的精确检测. Cheetah 3[5 ] 是具有代表性的无足端传感器的电机狗,如图1 (b)所示,腿部为串联式结构,且大小腿电机都安装在腿部上端,小腿通过传动机构间接驱动,又由于腿部质量进行轻量化设计,腿部总质量占机器人总质量的不到10%,在设计控制模型的时候可以忽略不计,将接触力直接等效地施加在机器人质心处,为后续的基于力估计的力优化提供了简化模型. ANYmal[6 ] 是另外一款电机狗,如图1 (c)所示,腿部为串联式结构,但与Cheetah 3不同,大小电机都分别直接驱动大小腿,没有中间传动部分,可以提高机器人的响应速度,也可以减少机械损失,提高机器人的能效. 电机安装在小腿关节处,可以降低机器人的重心,提供更稳定的支撑基础. Minitaur[7 ] 是并联式电机狗,如图1 (d)所示,与ANYmal相似,Minitaur的并联腿相对应的杆件由电机直接驱动. Minitaur腿部是并联结构,两电动机可以充当传感器,让它们感觉自己接触到地面,也可以像弹簧阻尼器系统一样工作,因此虽然腿是刚性的,但是机器人还是有弹力的,保证了机器人的柔顺性. ...
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
3
... BigDog[4 ] 是典型的液压四足机器人,如图1 (a)所示,其配备的弹性高度可调的液压伸缩腿可以帮助机器人适应不同的地形和行走姿势,提供稳定的支撑. 足端配备的弹簧减震系统可以提高柔顺性,帮助机器人与地面更稳定地接触,有利于足端力传感器的精确检测. Cheetah 3[5 ] 是具有代表性的无足端传感器的电机狗,如图1 (b)所示,腿部为串联式结构,且大小腿电机都安装在腿部上端,小腿通过传动机构间接驱动,又由于腿部质量进行轻量化设计,腿部总质量占机器人总质量的不到10%,在设计控制模型的时候可以忽略不计,将接触力直接等效地施加在机器人质心处,为后续的基于力估计的力优化提供了简化模型. ANYmal[6 ] 是另外一款电机狗,如图1 (c)所示,腿部为串联式结构,但与Cheetah 3不同,大小电机都分别直接驱动大小腿,没有中间传动部分,可以提高机器人的响应速度,也可以减少机械损失,提高机器人的能效. 电机安装在小腿关节处,可以降低机器人的重心,提供更稳定的支撑基础. Minitaur[7 ] 是并联式电机狗,如图1 (d)所示,与ANYmal相似,Minitaur的并联腿相对应的杆件由电机直接驱动. Minitaur腿部是并联结构,两电动机可以充当传感器,让它们感觉自己接触到地面,也可以像弹簧阻尼器系统一样工作,因此虽然腿是刚性的,但是机器人还是有弹力的,保证了机器人的柔顺性. ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
On the improvement of walking performance in natural environments by a compliant adaptive gait
1
2006
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Walking up and down hill with a biologically-inspired postural reflex in a quadrupedal robot
1
2008
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Quadruped walking robots at Tokyo Institute of Technology
1
2009
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Petman: a humanoid robot for testing chemical protective clothing
3
2012
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... 如地下矿山或下水道,机器人很难连续操作,因为外部传感器可能会因雾、黑暗、污垢或故障而失效. 为了在这种情况下实现自主导航,可以利用机器人本体感觉进行定位,在没有任何相机或激光雷达传感器帮助的情况下,根据先前的环境地图进行定位. Buchanan等[91 ] 提出基于序列蒙特卡罗方法的四足机器人6自由度(degree of freedom,DOF)定位算法,在给定姿势、关节运动学和足部接触状态的情况下,能够识别出机器人在先前地图中最可能的位置及过去的轨迹. Wisth等[92 ] 使用本体感觉传感器,例如惯性测量单元(IMU)、编码器和扭矩传感器来完成触地检测,通过接触辅助不变扩展卡尔曼滤波器生成准确的里程计轨迹,构建稳健的本体感觉里程计. Lin等[60 ] 设计基于深度学习的接触估计器,该估计器不需要专用传感器,而是使用关节编码器、运动学和IMU数据. 使用MiniCheetah[11 ] 在8个不同的地形上创建接触数据集. 部署接触估计器和接触辅助不变扩展卡尔曼滤波器(IEKF),实验表明,由此产生的里程计轨迹与最先进的视觉SLAM算法相当. ...
1
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
5
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... [13 ]可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
2
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
Design of HyQ: a hydraulically and electrically actuated quadruped robot
1
2011
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
1
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
1
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
The littledog robot
1
2011
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Multi-expert learning of adaptive legged locomotion
3
2020
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
1
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
March of the sandbots
1
2009
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
1
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Forces acting on a biped robot. center of pressure-zero moment point
1
2004
... 足式机器人触地检测技术在机器人运动控制中起到非常重要的作用,尤其是机器人的运动稳定性,针对足式机器人,常用的运动稳定性评估方法主要包括静态稳定性和动态稳定性评估,这2种稳定性评估与环境参数之间有密切联系. 静态稳定性评估一般只适用于地形坡度小、地形不平度小以及地表摩擦力大的较理想的平面,动态稳定性评估在适应静态稳定性评估的同时,可以满足地形更加复杂的地面. 常见的静态稳定性评估有重心投影法(center of gravity projection method,CGPM)[82 ] 、静态稳定边界法(static stability margin, SSM)[83 ] 及能量稳定边界法(energy stabilitymargin,ESM)[84 ] . 常见的动态稳定性评估有零力矩点法(zero moment point,ZMP)[85 ] ,该方法认为若地面上存在重力、外力和惯性力对该点的合力矩为零的点,该点称为零力矩点,若ZMP在支撑区域内,则机器人是稳定的. 压力中心法(center of pressure,COP)[86 ] 是基于合外力与支撑多边形几何关系的判定方法. 该方法计算质心沿合力方向到支撑平面的投影,若该投影在支撑平面多边形内,则处于稳定状态. 由于静态稳定性评估大多数都是基于偏理想化的条件总结出来的,且大部分只适用于较规整的地面,相对动态稳定性评估用得少. 下面重点介绍动态稳定性评估与运动控制以及触地检测技术的关系. ...
Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots
1
2018
... Bellicoso等[87 ] 设计在线的基于ZMP的运动规划器,把它作为接触计划和机器人状态的函数,不断更新参考运动轨迹. 通过求解单独的优化问题,获得每条腿的参考立足点. 生成的优化运动计划由分层全身控制器跟踪,使得四足机器人能够完成动态的高难度动作,满足复杂环境的高动态稳定行走的要求. Khorram等[88 ] 将COP作为机器人的动态稳定性评估方法,将稳定性和防滑条件作为线性约束加入到优化问题中. 利用最小二乘法求解优化问题,得到不违反摩擦条件和稳定条件的允许加速度,使得机器人在外力干扰下能够迅速恢复. ...
1
... Bellicoso等[87 ] 设计在线的基于ZMP的运动规划器,把它作为接触计划和机器人状态的函数,不断更新参考运动轨迹. 通过求解单独的优化问题,获得每条腿的参考立足点. 生成的优化运动计划由分层全身控制器跟踪,使得四足机器人能够完成动态的高难度动作,满足复杂环境的高动态稳定行走的要求. Khorram等[88 ] 将COP作为机器人的动态稳定性评估方法,将稳定性和防滑条件作为线性约束加入到优化问题中. 利用最小二乘法求解优化问题,得到不违反摩擦条件和稳定条件的允许加速度,使得机器人在外力干扰下能够迅速恢复. ...
1
... 除了应用稳定性评估的运动控制方法与触地检测有密切关系,基于弹簧倒立摆模型的方法[89 ] 、模型预测控制的方法[90 ] 、深度强化学习的方法[36 ] 都需要机器人的接触力及实际的接触状态,根据接触信息来调整步态、姿态和力矩等控制参数,帮助机器人实现稳定的运动姿态和平衡控制. ...
1
... 除了应用稳定性评估的运动控制方法与触地检测有密切关系,基于弹簧倒立摆模型的方法[89 ] 、模型预测控制的方法[90 ] 、深度强化学习的方法[36 ] 都需要机器人的接触力及实际的接触状态,根据接触信息来调整步态、姿态和力矩等控制参数,帮助机器人实现稳定的运动姿态和平衡控制. ...
1
... 如地下矿山或下水道,机器人很难连续操作,因为外部传感器可能会因雾、黑暗、污垢或故障而失效. 为了在这种情况下实现自主导航,可以利用机器人本体感觉进行定位,在没有任何相机或激光雷达传感器帮助的情况下,根据先前的环境地图进行定位. Buchanan等[91 ] 提出基于序列蒙特卡罗方法的四足机器人6自由度(degree of freedom,DOF)定位算法,在给定姿势、关节运动学和足部接触状态的情况下,能够识别出机器人在先前地图中最可能的位置及过去的轨迹. Wisth等[92 ] 使用本体感觉传感器,例如惯性测量单元(IMU)、编码器和扭矩传感器来完成触地检测,通过接触辅助不变扩展卡尔曼滤波器生成准确的里程计轨迹,构建稳健的本体感觉里程计. Lin等[60 ] 设计基于深度学习的接触估计器,该估计器不需要专用传感器,而是使用关节编码器、运动学和IMU数据. 使用MiniCheetah[11 ] 在8个不同的地形上创建接触数据集. 部署接触估计器和接触辅助不变扩展卡尔曼滤波器(IEKF),实验表明,由此产生的里程计轨迹与最先进的视觉SLAM算法相当. ...
VILENS: visual, inertial, lidar, and leg odometry for all-terrain legged robots
2
2022
... 如地下矿山或下水道,机器人很难连续操作,因为外部传感器可能会因雾、黑暗、污垢或故障而失效. 为了在这种情况下实现自主导航,可以利用机器人本体感觉进行定位,在没有任何相机或激光雷达传感器帮助的情况下,根据先前的环境地图进行定位. Buchanan等[91 ] 提出基于序列蒙特卡罗方法的四足机器人6自由度(degree of freedom,DOF)定位算法,在给定姿势、关节运动学和足部接触状态的情况下,能够识别出机器人在先前地图中最可能的位置及过去的轨迹. Wisth等[92 ] 使用本体感觉传感器,例如惯性测量单元(IMU)、编码器和扭矩传感器来完成触地检测,通过接触辅助不变扩展卡尔曼滤波器生成准确的里程计轨迹,构建稳健的本体感觉里程计. Lin等[60 ] 设计基于深度学习的接触估计器,该估计器不需要专用传感器,而是使用关节编码器、运动学和IMU数据. 使用MiniCheetah[11 ] 在8个不同的地形上创建接触数据集. 部署接触估计器和接触辅助不变扩展卡尔曼滤波器(IEKF),实验表明,由此产生的里程计轨迹与最先进的视觉SLAM算法相当. ...
... 对于庞大的城市地下基础设施,一般靠专业人员进行检查,但是对于狭窄黑暗环境,很大程度上加大了工作的困难程度和危险程度. 针对该场景,瑞士联邦理工学院研发的四足机器人[92 ] 可以利用足端的触觉传感器,代替工人对下水道水泥地面缺陷检测. 在类似于月球、火星完全未知的环境中,利用地形与地质的感知帮助机器人行走尤为重要. 例如勇气号火星探测器因为无法提前感知地面,导致机器人陷入看似牢固的软沙坑中,耗费几周才得以脱险[93 ] ,因此光靠视觉来规划路径是存在较大风险的,需要结合触觉感知地面土质情况来提高机器人在未知地形中行走的稳定性和可靠性. ANYmal机器人[94 ] 使用1条腿进行撞击,用剩下的3条腿支撑主体,由放置在脚上的传感器记录产生的震动,使用离散小波变换进行分解,通过支持向量机识别土壤类别. Mudalige等[95 ] 采用触敏脚(touch sensitive foot,TSF),它能够在经过训练的CNN模型的帮助下识别机器人行走的表面纹理,机器人在未知环境中移动,只须识别特定的触觉模式,这些模式将给机器人指示直线路径、左转或右转、人行横道、道路等. 这将允许机器人在照明条件较差的环境中,能够稳健地行走. ...
1
... 对于庞大的城市地下基础设施,一般靠专业人员进行检查,但是对于狭窄黑暗环境,很大程度上加大了工作的困难程度和危险程度. 针对该场景,瑞士联邦理工学院研发的四足机器人[92 ] 可以利用足端的触觉传感器,代替工人对下水道水泥地面缺陷检测. 在类似于月球、火星完全未知的环境中,利用地形与地质的感知帮助机器人行走尤为重要. 例如勇气号火星探测器因为无法提前感知地面,导致机器人陷入看似牢固的软沙坑中,耗费几周才得以脱险[93 ] ,因此光靠视觉来规划路径是存在较大风险的,需要结合触觉感知地面土质情况来提高机器人在未知地形中行走的稳定性和可靠性. ANYmal机器人[94 ] 使用1条腿进行撞击,用剩下的3条腿支撑主体,由放置在脚上的传感器记录产生的震动,使用离散小波变换进行分解,通过支持向量机识别土壤类别. Mudalige等[95 ] 采用触敏脚(touch sensitive foot,TSF),它能够在经过训练的CNN模型的帮助下识别机器人行走的表面纹理,机器人在未知环境中移动,只须识别特定的触觉模式,这些模式将给机器人指示直线路径、左转或右转、人行横道、道路等. 这将允许机器人在照明条件较差的环境中,能够稳健地行走. ...
1
... 对于庞大的城市地下基础设施,一般靠专业人员进行检查,但是对于狭窄黑暗环境,很大程度上加大了工作的困难程度和危险程度. 针对该场景,瑞士联邦理工学院研发的四足机器人[92 ] 可以利用足端的触觉传感器,代替工人对下水道水泥地面缺陷检测. 在类似于月球、火星完全未知的环境中,利用地形与地质的感知帮助机器人行走尤为重要. 例如勇气号火星探测器因为无法提前感知地面,导致机器人陷入看似牢固的软沙坑中,耗费几周才得以脱险[93 ] ,因此光靠视觉来规划路径是存在较大风险的,需要结合触觉感知地面土质情况来提高机器人在未知地形中行走的稳定性和可靠性. ANYmal机器人[94 ] 使用1条腿进行撞击,用剩下的3条腿支撑主体,由放置在脚上的传感器记录产生的震动,使用离散小波变换进行分解,通过支持向量机识别土壤类别. Mudalige等[95 ] 采用触敏脚(touch sensitive foot,TSF),它能够在经过训练的CNN模型的帮助下识别机器人行走的表面纹理,机器人在未知环境中移动,只须识别特定的触觉模式,这些模式将给机器人指示直线路径、左转或右转、人行横道、道路等. 这将允许机器人在照明条件较差的环境中,能够稳健地行走. ...
1
... 对于庞大的城市地下基础设施,一般靠专业人员进行检查,但是对于狭窄黑暗环境,很大程度上加大了工作的困难程度和危险程度. 针对该场景,瑞士联邦理工学院研发的四足机器人[92 ] 可以利用足端的触觉传感器,代替工人对下水道水泥地面缺陷检测. 在类似于月球、火星完全未知的环境中,利用地形与地质的感知帮助机器人行走尤为重要. 例如勇气号火星探测器因为无法提前感知地面,导致机器人陷入看似牢固的软沙坑中,耗费几周才得以脱险[93 ] ,因此光靠视觉来规划路径是存在较大风险的,需要结合触觉感知地面土质情况来提高机器人在未知地形中行走的稳定性和可靠性. ANYmal机器人[94 ] 使用1条腿进行撞击,用剩下的3条腿支撑主体,由放置在脚上的传感器记录产生的震动,使用离散小波变换进行分解,通过支持向量机识别土壤类别. Mudalige等[95 ] 采用触敏脚(touch sensitive foot,TSF),它能够在经过训练的CNN模型的帮助下识别机器人行走的表面纹理,机器人在未知环境中移动,只须识别特定的触觉模式,这些模式将给机器人指示直线路径、左转或右转、人行横道、道路等. 这将允许机器人在照明条件较差的环境中,能够稳健地行走. ...
1
... 传统的力传感器通常只能测量单一接触点或者单一轴向的力,然而对于足式机器人来说,能够同时测量多个接触点或者多轴多方向的力会更加有益,可以更全面地了解机器人与环境之间的接触情况. Shi等[96 ] 研发的6轴力/扭矩传感器数据可以提供更加准确的接触力信息,帮助机器人更好地通过不平整和变形的柔软地. Kolvenbachde等[97 ] 在ANYmal机器人腿部底端安装被动的踝关节,在踝关节处安装IMU来测量鞋底的相对方向,在足端内部配备6轴力/扭矩传感器检测触地力. 通过这套多轴多方向力传感装置,可以实现高达98%正确率的土壤类别识别. Chuah等[98 ] 设计双模态半球传感器,利用应力场方法,在弹性体内的多个位置取样压力,通过高斯过程回归,将采样得到的应力分布映射为半球面传感器表面的输出力$ {f_x} $ $ {f_y} $ $ {f_z} $ $ \theta $ $ \varphi $ $ {f_z} $ $ {f_x} $ $ {f_y} $ $ \theta $ fx 和fy 的RMS误差分别为2.69%~7.51%和2.79%~9.62%. ...
Haptic inspection of planetary soils with legged robots
1
2019
... 传统的力传感器通常只能测量单一接触点或者单一轴向的力,然而对于足式机器人来说,能够同时测量多个接触点或者多轴多方向的力会更加有益,可以更全面地了解机器人与环境之间的接触情况. Shi等[96 ] 研发的6轴力/扭矩传感器数据可以提供更加准确的接触力信息,帮助机器人更好地通过不平整和变形的柔软地. Kolvenbachde等[97 ] 在ANYmal机器人腿部底端安装被动的踝关节,在踝关节处安装IMU来测量鞋底的相对方向,在足端内部配备6轴力/扭矩传感器检测触地力. 通过这套多轴多方向力传感装置,可以实现高达98%正确率的土壤类别识别. Chuah等[98 ] 设计双模态半球传感器,利用应力场方法,在弹性体内的多个位置取样压力,通过高斯过程回归,将采样得到的应力分布映射为半球面传感器表面的输出力$ {f_x} $ $ {f_y} $ $ {f_z} $ $ \theta $ $ \varphi $ $ {f_z} $ $ {f_x} $ $ {f_y} $ $ \theta $ fx 和fy 的RMS误差分别为2.69%~7.51%和2.79%~9.62%. ...
1
... 传统的力传感器通常只能测量单一接触点或者单一轴向的力,然而对于足式机器人来说,能够同时测量多个接触点或者多轴多方向的力会更加有益,可以更全面地了解机器人与环境之间的接触情况. Shi等[96 ] 研发的6轴力/扭矩传感器数据可以提供更加准确的接触力信息,帮助机器人更好地通过不平整和变形的柔软地. Kolvenbachde等[97 ] 在ANYmal机器人腿部底端安装被动的踝关节,在踝关节处安装IMU来测量鞋底的相对方向,在足端内部配备6轴力/扭矩传感器检测触地力. 通过这套多轴多方向力传感装置,可以实现高达98%正确率的土壤类别识别. Chuah等[98 ] 设计双模态半球传感器,利用应力场方法,在弹性体内的多个位置取样压力,通过高斯过程回归,将采样得到的应力分布映射为半球面传感器表面的输出力$ {f_x} $ $ {f_y} $ $ {f_z} $ $ \theta $ $ \varphi $ $ {f_z} $ $ {f_x} $ $ {f_y} $ $ \theta $ fx 和fy 的RMS误差分别为2.69%~7.51%和2.79%~9.62%. ...
1
... Chilian等[99 ] 提出融合腿部里程计、视觉里程计和IMU数据的方法. 即使在恶劣的照明条件下,多传感器数据融合也能实现精确的姿态估计. Ma等[100 ] 使用4类信息来估计机器人的身体姿态状态,包括双目视觉里程计、IMU、腿部运动学和GPS. 在实验中,机器人的平均运动误差约为1%. Nobili等[101 ] 融合IMU、运动学、双目视觉传感器和雷达的信息,研究在异常情况(如足部滑动)下对身体速度和位置的估计. 该方法基于IMU和运动学信息的融合,辅以双目视觉和雷达探测信息,可以将位置估计误差降低到0.01 m. 可以看出,融合的传感器越多,则估计精度越高,甚至可以解决类似足端滑动的复杂触地问题. 随着计算机发展及各类算法的改进,多传感器融合会使得触地估计更加准确化. ...
Real-time pose estimation of a dynamic quadruped in GPS-denied environments for 24-hour operation
1
2016
... Chilian等[99 ] 提出融合腿部里程计、视觉里程计和IMU数据的方法. 即使在恶劣的照明条件下,多传感器数据融合也能实现精确的姿态估计. Ma等[100 ] 使用4类信息来估计机器人的身体姿态状态,包括双目视觉里程计、IMU、腿部运动学和GPS. 在实验中,机器人的平均运动误差约为1%. Nobili等[101 ] 融合IMU、运动学、双目视觉传感器和雷达的信息,研究在异常情况(如足部滑动)下对身体速度和位置的估计. 该方法基于IMU和运动学信息的融合,辅以双目视觉和雷达探测信息,可以将位置估计误差降低到0.01 m. 可以看出,融合的传感器越多,则估计精度越高,甚至可以解决类似足端滑动的复杂触地问题. 随着计算机发展及各类算法的改进,多传感器融合会使得触地估计更加准确化. ...
1
... Chilian等[99 ] 提出融合腿部里程计、视觉里程计和IMU数据的方法. 即使在恶劣的照明条件下,多传感器数据融合也能实现精确的姿态估计. Ma等[100 ] 使用4类信息来估计机器人的身体姿态状态,包括双目视觉里程计、IMU、腿部运动学和GPS. 在实验中,机器人的平均运动误差约为1%. Nobili等[101 ] 融合IMU、运动学、双目视觉传感器和雷达的信息,研究在异常情况(如足部滑动)下对身体速度和位置的估计. 该方法基于IMU和运动学信息的融合,辅以双目视觉和雷达探测信息,可以将位置估计误差降低到0.01 m. 可以看出,融合的传感器越多,则估计精度越高,甚至可以解决类似足端滑动的复杂触地问题. 随着计算机发展及各类算法的改进,多传感器融合会使得触地估计更加准确化. ...
Rhex: a biologically inspired hexapod runner
3
2001
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
... 接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... Leg design of each legged robot
Tab.4 机器人 机器人 腿部结构 足端形状 足端 触地检测传感器 已使用的触 应用场景 BigDog[4 ] 重型 串联式+弹簧 圆柱型 橡胶 压力传感器 基于力传感器的触地检测 军事 Cheetah 3[5 ] 中型 串联式 圆柱型 橡胶 无 足端力估计+触地状态机 巡检、救援 ANYmalC[6 ] 中型 串联式 半圆型 橡胶 无 多传感器融合+足端力估计、深度强化学习(间接保证) 工业巡检 Minitaur[7 ] 轻型 并联式 半圆型 橡胶 无 强化学习(间接保证)、基于速度的接触定位 救援、勘探 ATLAS[13 ] 重型 串联式 平面型 金属 力/扭矩传感器 多传感器融合+足端力估计、深度强化学习(间接保证) 工业生产、巡检、救援 Jueying[19 ] 中型 串联式 圆柱型 橡胶 无 足端力估计、深度强化学习(间接保证) 巡检、救援、排爆 RHex[23 ] 轻型 轮腿式 仿生型 橡胶 无 触地状态机 勘探、救援
2. 触地检测方法 2.1. 外部传感器直接检测 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
Multi-modal locomotion robotic platform using leg-track-wheel articulations
1
2005
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
Locomotion control of hybrid cockroach robots
1
2015
... Comparative analysis of robot foot end shapes
Tab.1 足端形状 优缺点分析 典型机器人 平面型 优点:接触面积较大,能够提供较大的附着力,承重能力较强 SILO4[8 ] 、Biosbot[9 ] 、TITAN[10 ] 、[11 ] 、HRP-3[12 ] 、ATLAS[13 ] 缺点:适应性不高,在复杂地形下,容易造成机器人行走不稳 半圆型 优点:点接触足端,地形适应性较强,在复杂地形环境中应用广泛 ANYmal[6 ] 、MiniCheetah[14 ] 、HYQ[15 ] 、[16 ] 、CyberDog[17 ] 、LittleDog[18 ] 缺点:在山区类地形中,足端与地面接触面小,导致附着力性能不好,容易打滑 圆柱型 优点:线接触足端,复杂地形适应性好,结构简单 BigDog[4 ] 、 Cheetah 3[5 ] [19 ] 、Pegasus[20 ] 缺点:线接触,容易导致接触面积不够,大斜度地面容易打滑 仿生型 优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 SandBot[21 ] 、Stickybot[22 ] [23 ] 、Azimuth[24 ] [25 ] 缺点:仿生型足端,结构较复杂,耐久性仍需验证
表 2 机器人足端材料的对比分析 ...
A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots
1
2021
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
1
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning
1
2022
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
1
... Comparative analysis of robot foot end materials
Tab.2 足端材料 接触性 可变性 耐磨性 强度 质量 典型机器人 橡胶 较好 好 较好 较低 较小 ANYmal[6 ] 、MiniCheetah[14 ] 聚合物 较差 较差 较好 较低 小 Hexapod[26 ] 、Laikago[27 ] 金属 差 差 好 高 大 PETMAN[11 ] 、ATLAS[13 ] 3D打印(非橡胶类) 较差 较差 较低 较低 小 Ji[28 ] 、Muralidharan[29 ]
1.3. 传感器设计 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
Mechanical design of the humanoid robot platform, HUBO
2
2007
... 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
2
... 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
The application of force-sensing resistor sensors for measuring forces developed by the human hand
2
2004
... 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
2
... 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
Integrated ground reaction force sensing and terrain classification for small legged robots
2
2016
... 力/扭矩传感器[30 -31 ] 存在惯性大、高速冲击下有噪声的问题,采用力传感电阻器(force-sensing resistor,FSR)在小型机器人平台上检测接触和测量力较实用. FSR的测量能力较差,只能提供单轴测量[32 ] . Remy等[33 ] 为了解决该问题,将多个FSR集成在一个允许多轴测量的组合中. 与FSR功能相似的另外一种力传感器是电容触觉传感器[34 ] ,它和FSR都采用薄板的形式,薄板分别包含检测压力或电容的传感器阵列. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
2
... FSR的替代方案是将空气压力传感器集成在空心和密封橡胶结构内[35 ] ,这能够测量到橡胶结构压缩过程中发生的气压变化,提供了一种相当简单的测量力和检测接触的方法. 由于它只用了一个气压传感器,所能提供的接触力信息有限. 该问题通过将该类传感器阵列集成到复合结构中来解决,该结构允许三维力测量[36 ] . ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
Enabling force sensing during ground locomotion: a bio-inspired, multi-axis, composite force sensor using discrete pressure mapping
3
2014
... FSR的替代方案是将空气压力传感器集成在空心和密封橡胶结构内[35 ] ,这能够测量到橡胶结构压缩过程中发生的气压变化,提供了一种相当简单的测量力和检测接触的方法. 由于它只用了一个气压传感器,所能提供的接触力信息有限. 该问题通过将该类传感器阵列集成到复合结构中来解决,该结构允许三维力测量[36 ] . ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... 除了应用稳定性评估的运动控制方法与触地检测有密切关系,基于弹簧倒立摆模型的方法[89 ] 、模型预测控制的方法[90 ] 、深度强化学习的方法[36 ] 都需要机器人的接触力及实际的接触状态,根据接触信息来调整步态、姿态和力矩等控制参数,帮助机器人实现稳定的运动姿态和平衡控制. ...
Design and characterization of a three-axis hall effect-based soft skin sensor
2
2016
... 除了上述4类力传感器,还有许多其他的传感器,其中包括基于磁霍尔效应的传感器[37 ] 、光学触觉传感器[38 ] 、GelSight触觉传感器[39 ] 、触觉传感阵列[40 ] 和其他基于橡胶嵌入应力场的传感器[41 ] . ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
Hybrid compliance control for locomotion of electrically actuated quadruped robot
2
2019
... 除了上述4类力传感器,还有许多其他的传感器,其中包括基于磁霍尔效应的传感器[37 ] 、光学触觉传感器[38 ] 、GelSight触觉传感器[39 ] 、触觉传感阵列[40 ] 和其他基于橡胶嵌入应力场的传感器[41 ] . ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
Gelsight: high-resolution robot tactile sensors for estimating geometry and force
1
2017
... 除了上述4类力传感器,还有许多其他的传感器,其中包括基于磁霍尔效应的传感器[37 ] 、光学触觉传感器[38 ] 、GelSight触觉传感器[39 ] 、触觉传感阵列[40 ] 和其他基于橡胶嵌入应力场的传感器[41 ] . ...
The feel of MEMS barometers: inexpensive and easily customized tactile array sensors
1
2014
... 除了上述4类力传感器,还有许多其他的传感器,其中包括基于磁霍尔效应的传感器[37 ] 、光学触觉传感器[38 ] 、GelSight触觉传感器[39 ] 、触觉传感阵列[40 ] 和其他基于橡胶嵌入应力场的传感器[41 ] . ...
Robust and inexpensive six-axis force–torque sensors using MEMS barometers
1
2017
... 除了上述4类力传感器,还有许多其他的传感器,其中包括基于磁霍尔效应的传感器[37 ] 、光学触觉传感器[38 ] 、GelSight触觉传感器[39 ] 、触觉传感阵列[40 ] 和其他基于橡胶嵌入应力场的传感器[41 ] . ...
Multiangle, self-powered sensor array for monitoring head impacts
3
2023
... 以上介绍的都是一些有源的力传感器,Zu等[42 ] 研究出无源自驱的力传感器,该传感器可以在没有电源的情况下将来自多个方向的力(如压缩、旋转和剪切)转换成电信号,并将脉冲信号编码成彩色映射,获取力的大小和作用位置. 下面将上述的常用力传感器和部分其他类型的检测传感器进行对比分析,如表3 所示. ...
... Comparative analysis of robot foot end sensors
Tab.3 传感器类型 优缺点分析 参考文献 力/扭矩传感器 优点:高精度,宽量程,高灵敏度,耐用. 文献[30 ]、[31 ] 缺点:质量偏大,位于足端会增加惯性,高速、高冲击下会出现惯性噪声. 压敏电阻传感器 优点:结构简单,质量小,耐用度较高. 文献[32 ]、[33 ] 缺点:有限量程、受温度影响,不适合高精度、高动态测量. 电容触觉传感器 优点:测量范围大,温度稳定性好,结构简单,适应性强. 文献[34 ] 缺点:输出阻抗高,负载能力差,寄生电容影响大. 气压传感器 优点:结构轻巧,有良好的顺应性和阻尼性. 文献[35 ]、[36 ] 缺点:动态响应较慢,寿命不长. 霍尔效应传感器 优点:精度高、响应速度快、无接触测量、具有线性特性、抗干扰能力强. 文献[37 ] 缺点:灵敏度不高、温度漂移明显、对磁场幅值和方向非常敏感、成本较高. 光学触觉传感器 优点:高过载范围、高精度、抗电磁干扰、非接触性、无损测量. 文献[38 ] 缺点:受光照影响,光源不足,处理速度不够快. 自驱力传感器 优点:独立性、省电、灵活性和响应速度快. 文献[42 ] 缺点:能源和激励信号的限制、设计和实现的复杂性、受环境噪声干扰的影响.
接下来列举典型的足式机器人,针对上述腿部的结构设计、足端设计及传感器设计这3个部分展开对比分析,具体见表4 . 可以看出,BigDog[4 ] 和ATLAS[13 ] 两重型机器人的足端形状采用接触面积较大的平面型及圆柱型,触地检测采用基于力传感器的触地检测方法,主要是因为腿部质量偏大,不容易简化为力估计的控制模型;其他Cheetah 3[5 ] 、ANYmalC[6 ] 、Minitaur[7 ] 、Jueying[19 ] 、RHex[23 ] 这几款典型的中轻型狗足端形状采用接触面积较小、但是地形适应性较强的圆柱型和半圆形,都没有利用力传感器进行触地检测,采用足端力估计的方法进行触地检测. 虽然从质量上可以大致将机器人的触地检测方法分成有、无力传感器两大类(特殊需要除外),但是基于无控制模型的强化学习算法可以将它们无差别地统一起来. 例如ATLAS[13 ] 可以利用深度强化学习,保证了机器人在复杂的地形上行走的稳定性,实现了机器人在行走过程中的触地检测,后续介绍的机器学习方法同样适用于有、无力传感器这2种检测方法. ...
... 针对外部传感器直接检测接触状态来说,未来的足式机器人触地检测方法将会推动硬件技术的改进和集成. 传感器的体积、质量和功耗将进一步减小,以便更好地集成到机器人的脚部或其他接触部分中,减少对机器人整体结构和质量的影响. Nam等[44 ] 设计低成本、轻量化、简单耐用的脚接触传感器,能够可靠地检测接触角度为30°~150°的地面接触. 在承受超过80 N的接触负载下,可以正常工作超过10 000步,Zu等[42 ] 研究无源自驱的力传感器,该传感器可以在没有电源的情况下将力信号转换成电信号,并将电信号编码成彩色映射,获取力的大小和作用位置,实现无源零功耗的触地检测. ...
2
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
3
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... 针对外部传感器直接检测接触状态来说,未来的足式机器人触地检测方法将会推动硬件技术的改进和集成. 传感器的体积、质量和功耗将进一步减小,以便更好地集成到机器人的脚部或其他接触部分中,减少对机器人整体结构和质量的影响. Nam等[44 ] 设计低成本、轻量化、简单耐用的脚接触传感器,能够可靠地检测接触角度为30°~150°的地面接触. 在承受超过80 N的接触负载下,可以正常工作超过10 000步,Zu等[42 ] 研究无源自驱的力传感器,该传感器可以在没有电源的情况下将力信号转换成电信号,并将电信号编码成彩色映射,获取力的大小和作用位置,实现无源零功耗的触地检测. ...
4
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
2
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
3
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... 四足机器人TITAN-VIII[63 ] 通过调整步态模式变量,对检测到的腿部加速度做出打滑反应. 步态适应被证明是有效的,但长的收敛时间不能保证立即稳定. 将垂直于局部地面的接触力扰动施加到支撑脚上,从而将接触力推回到摩擦锥中. Focchi等[64 ] 针对HyQ提出滑移检测和恢复策略的组合,在仿真中得到了验证. Rotella等[47 ] 提出从六维接触传感器测量中学习接触概率. 若6种接触概率中的一种或多种明显低于其他接触概率,则表明存在滑动. 在机械装置方面,例如触觉传感器[65 ] 或剪切力传感器[66 ] 可以用于滑动检测,但是这种传感器由于反复撞击,难以在腿式系统上维护. Jenelten等[67 ] 采用隐马尔可夫模型的概率滑动估计器,利用阻抗控制和摩擦调制作为在牵引损失期间恢复稳定性的有用工具. ANYmal机器人能够在湿滑的地面上动态行走的实验结果,证明了估计/控制架构的成功. ...
Nonlinear state estimation for humanoid robot walking
2
2018
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
2
... 目前,对于足式机器人,采用外部传感器来检测接触碰撞是比较直接且可靠的方法. Talebi等[43 ] 利用接触开关来区分运动过程中的站立和摆动阶段. Nam等[44 ] 利用接触阈值来构成有限状态机,实现接触状态的切换. 除了力传感器本身作为直接的触地检测外,力传感器还可以联合其他本体传感器进行综合性的触地检测. Bloesch等[45 ] 在StarlETH四足动物的脚上使用二进制接触传感器来检测接触,利用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性. Fallon等[46 ] 利用施密特触发器方法,通过Atlas人形机器人脚部的力/力矩传感器测得的垂直地面接触反力(ground reaction force,GRF)来确定触地状态,对触地状态下的那条腿进行状态估计. Rotella等[47 ] 使用模糊c-均值算法,对人形机器人脚部的力/力矩传感器和IMU测量进行聚类,独立估计每条腿的六自由度的接触概率,位移的均方根误差最大为0.053 m,相对基于固定法向力和噪声参数的触地检测误差小很多. NAO人形机器人[48 ] 采用的质心(center of mass, COM)估计器考虑地面高度和角动量率,不依赖力/力矩传感器,通过有效地利用联合编码器、FSR和IMU测量值,可以准确地估计3D-COM的位置、速度和作用在COM上的外力. 机器人在实物测试中表现良好,在x 、y 轴上的位姿误差分别为3.06和2.88 cm,偏航角为2.81°. Wang等[49 ] 通过四足机器人拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力矩,建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换. 对上述基于力传感器的触地检测方法进行对比分析,具体见表5 . ...
... Comparison of force sensor-based touchdown detection method
Tab.5 文献 力传感器种类 有无编码 有无IMU 检测原理与应用 文献[43 ] 接触开关 无 无 利用接触开关的开关信息来判断触地信息 文献[44 ] 二进制接触传感器 无 无 利用二进制接触传感器的接触阈值来构成有限状态机,实现接触状态的切换 文献[45 ] 二进制接触传感器 有 有 利用二进制接触传感器来确定腿部接触,用支撑腿的运动学约束来更新无迹卡尔曼滤波器,提高滤波器的鲁棒性 文献[46 ] 3轴力-扭矩传感器 有 有 利用力传感器GRF值对接触地状态进行检测,选用触地状态下的静止腿进行状态估计 文献[47 ] 力-扭矩传感器 有 有 使用模糊c-均值算法,对人形机器人脚部的F/T和IMU测量值进行聚类,独立估计每条腿的接触概率 文献[48 ] 脚敏电阻器(FSR) 有 有 利用力传感器压力对接触地状态进行检测,融合编码器、惯性、视觉里程测量,开展机器人的综合状态估计 文献[49 ] 力-扭矩传感器 有 有 根据拉格朗日动力学方程得到的关节力矩和力传感器得到的关节力建立触地检测函数,确定四足机器人脚的触地状态,实现腿的相位切换
2.2. 本体传感器间接判断 Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
1
... Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
State estimation for legged robots-consistent fusion of leg kinematics and IMU
3
2013
... Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
Contact-aided invariant extended Kalman filtering for robot state estimation
2
2020
... Ortenzi等[50 ] 提出仅基于关节位置测量来估计机器人与环境的接触约束的方法,该方法在易发生形变的接触面上表现较好,水平表面倾角的平均误差为2.4°,47°倾斜表面倾角的平均误差为4.2°. 因为卡尔曼滤波器可以融合不同传感器的数据,在基于多传感器数据融合的状态估计方面发挥了最大作用,不同的卡尔曼滤波器的特点及适用范围如表6 所示. Bloesch等[51 ] 提出状态估计框架,该框架通过使用扩展卡尔曼滤波器(extended Kalman filter,EKF),将惯性测量与腿部运动学相融合. 每个立足点的绝对位置包括在状态向量中,通过确定脚的姿势是否恒定来进行接触分类,该方法使得机器人在小跑状态下的末端位置误差小于行驶距离的5%. 利用这项工作,Bloesch等[45 ] 继续拓展了文献[51 ]的研究,用无迹卡尔曼滤波器(unscented Kalman filter,UKF)代替EKF,并将原先的状态向量利用公式重新改写. 为了使滤波器具有鲁棒性,在更新步骤中引入异常值抑制方法. 他们在StarlETH四足机器人上评估了他们的方法,机器人在不规则地面行走中的滚转角、俯仰角和偏航角估计的均方根为0.0086、0.0056和0.0693 rad,证明了它对一定量的足部打滑检测的鲁棒性. Hartley等[52 ] 将不变扩展卡尔曼滤波器(invariant extended Kalman filter,IEKF)运用到双足机器人中,该机器人能够通过不变扩展卡尔曼滤波器,对运动状态包括姿态角度和运动速度进行比较出色的状态估计. 进一步总结上述方法,具体见图2 . ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...
2
... Bledt等[53 ] 提出概率融合接触模型的方法,解决了动力学动态建模中存在不确定性现象的问题. 利用广义动量扰动观测器的离散扩展,以提高本体感受力控制估计的准确性,该算法利用基于事件的有限状态机来处理意外的过早和过晚触地. 这使得机器人可以根据估计的接触状态修改每条腿的控制动作,而不是不考虑实际接触状态而遵循严格的时间计划. 利用Cheetah 3机器人开展的实验表明,该方法的接触识别正确率高达99.3%. Gong等[54 ] 通过机载相机采集地面的图像,对采集的数据进行分析和计算,得到初步的机器人本体的速度和位置之后,再结合惯性测量单元信息,估计机器人的运动状态. Wang等[55 ] 提出利用速度测量来定位机器人本体感觉接触的运动学方法,使用粒子滤波器过滤掉估计过程中的多个候选接触点,减少接触位置的不确定性. Hwangbo等[56 ] 介绍具有隐马尔可夫模型的一维概率框架,该模型利用运动学、微分运动学和动力学来估计接触状态. 这种方法不依赖力/力矩传感器,有效地利用关节位置、速度和扭矩测量来估计GRF. Neunert等[57 ] 通过对机器人动力学进行阈值处理,从GRF推断出四足机器人的接触状态. ...
... Comparison of touchdown state estimation algorithm
Tab.7 算法框架 算法 所需状态量 算法原理 创新与改进 基于卡尔曼滤波器 EKF[51 ] 全局坐标系下的机身质心 通过卡尔曼滤波器,融合运动编码器 融合运动编码器数据与机载IMU测量数据,提高了触地状态估计的准确性. UKF[45 ] 在更新步骤中引入异常值抑制方法,提高了算法的鲁棒性. IEKF[52 ] 利用李群理论和不变观测器设计,开发接触辅助不变扩展卡尔曼滤波器,相对QEKF表现出优越的收敛性和一致性. KF[53 ] 全局坐标系下的机身质心 基于离散时间动量的观测器来估计 提出基于离散时间动量的观测器GM进行腿部外力估计的方法,将估计腿上的外力、测量概率模型进行卡尔曼融合,提高了接触状态估计的准确性. 基于粒子滤波器 PF[55 ] 机器人广义坐标位移、广义 使用速度约束来生成1组一维的可能 提出使用速度测量进行本体感觉接触定位的运动学方法,利用粒子滤波器过滤掉不符合的接触点,减少接触位置的不确定性. 隐马尔可夫模型 HMM[56 ] 机器人广义 融合动力学和正向/微分运动学信息 提出概率接触检测策略,该策略考虑全动力学和微分/正运动学,以最大限度地利用可用信息进行接触估计,提升了鲁棒性及响应速度. 监督学习 SL[57 ] 机器人广义 利用动力学、关节位置和扭矩测量 该方法利用逻辑分类器学习概率最高的GRF阈值,使基本速度误差最小. 无监督 DL[61 ] 机器人广义坐标位移、广义 提出基于本体感觉的深度学习框架, 仅采用本体感觉传感,尽管它依赖于模拟的地面真实接触数据进行分类过程,但算法可以推广到不同的摩擦表面和不同的腿式机器人平台,很容易从模拟转移到实践. 强化学习 RL[62 ] 机器人广义坐标位移、广义 通过强化学习训练运动策略,推断地 提出新的运动学习框架,该框架通过不对称Actor-Critic架构,仅使用本体感觉就能推断地形属性.
3. 特殊的场景触地检测策略 在非结构化和不平坦的地形上进行动态运动是足式机器人的一项具有挑战性的任务,特别是涉及以下3种情况,如图3 所示. ...


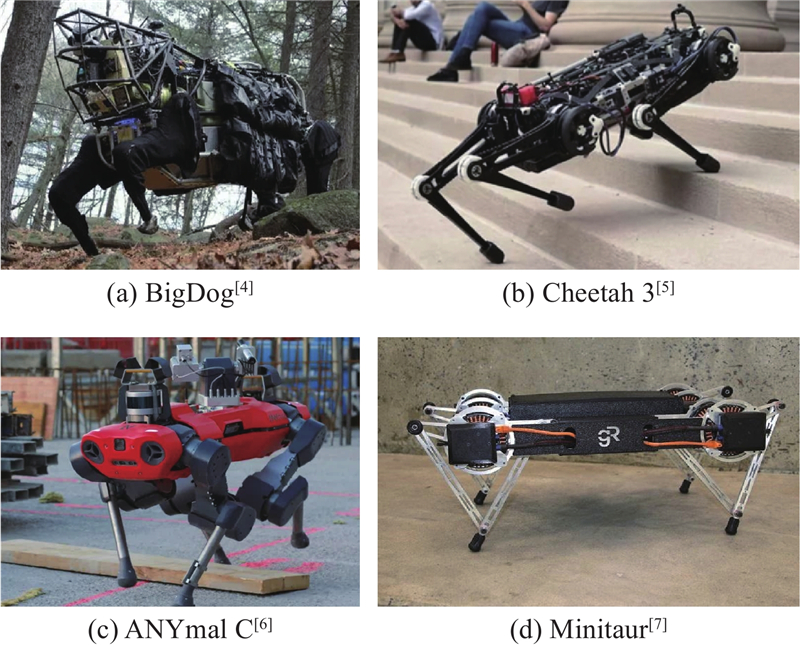
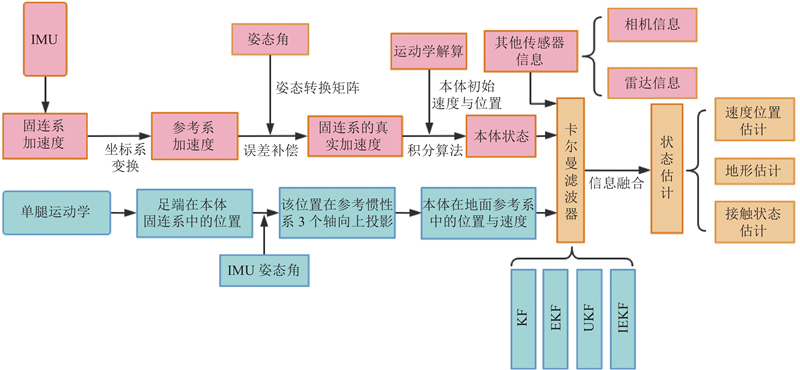
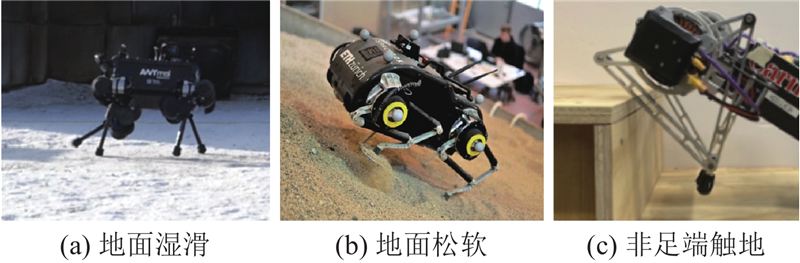
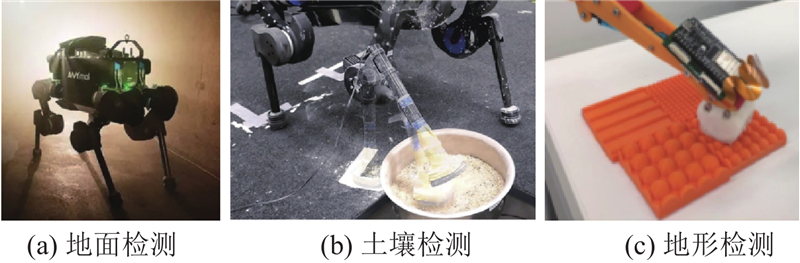

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}