| 机械工程 |
|

|
|
|
| 足式机器人触地检测方法的研究综述 |
姜晓勇1,2( ),应凯健1,吴起威1,魏璇1 ),应凯健1,吴起威1,魏璇1 |
1. 浙江科技学院 机械与能源工程学院,浙江 杭州 310000
2. 浙江大学 机械工程学院,浙江 杭州 310058 |
|
| Research overview on touchdown detection methods for footed robots |
| Xiaoyong JIANG1,2(),Kaijian YING1,Qiwei WU1,Xuan WEI1 |
1. School of Mechanical and Energy Engineering, Zhejiang University of Science and Technology, Hangzhou 310000, China
2. School of Mechanical Engineering, Zhejiang University, Hangzhou 310058, China |
引用本文:
姜晓勇,应凯健,吴起威,魏璇. 足式机器人触地检测方法的研究综述[J]. 浙江大学学报(工学版), 2024, 58(2): 334-348.
Xiaoyong JIANG,Kaijian YING,Qiwei WU,Xuan WEI. Research overview on touchdown detection methods for footed robots. Journal of ZheJiang University (Engineering Science), 2024, 58(2): 334-348.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2024.02.012
或
https://www.zjujournals.com/eng/CN/Y2024/V58/I2/334
|
| 54 |
GONG Y, HARTLEY R, DA X, et al. Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway [C]//2019 American Control Conference. Philadelphia: IEEE, 2019: 4559-4566.
|
| 55 |
WANG S, BHATIA A, MASON M T, et al. Contact localization using velocity constraints [J]. IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 7351−7358.
|
| 56 |
HWANGBO J, BELLICOSO C D, FANKHAUSER P, et al. Probabilistic foot contact estimation by fusing information from dynamics and differential/forward kinematics [C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 3872-3878.
|
| 57 |
NEUNERT M, FARSHIDIAN F, WINKLER A W, et al Trajectory optimization through contacts and automatic gait discovery for quadrupeds[J]. IEEE Robotics and Automation Letters, 2017, 2 (3): 1502- 1509
doi: 10.1109/LRA.2017.2665685
|
| 58 |
HUYNH B P, BAE J. Impact intensity estimation of aquadruped robot without using a force sensor [EB/OL]. (2022-04-03)[2023-10-08]. https://arxiv.org/pdf/2204.01003.
|
| 59 |
CAMURRI M, FALLON M, BAZEILLE S, et al Probabilistic contact estimation and impact detection for state estimation of quadruped robots[J]. IEEE Robotics and Automation Letters, 2017, 2 (2): 1023- 1030
doi: 10.1109/LRA.2017.2652491
|
| 60 |
LIN T Y, ZHANG R, YU J, et al. Legged robot state estimation using invariant Kalman filtering and learned contact events [EB/OL]. (2022-11-29)[2023-10-08]. https://arxiv.org/pdf/2106.15713.
|
| 61 |
PIPERAKIS S, MARAVGAKIS M, KANOULAS D, et al. Robust contact state estimation in humanoid walking gaits [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 6732-6738.
|
| 62 |
NAHRENDRA I M A, YU B, MYUNG H. Dreamwaq: learning robust quadrupedal locomotion with implicit terrain imagination via deep reinforcement learning [C]//IEEE International Conference on Robotics and Automation. London: IEEE, 2023: 5078-5084.
|
| 63 |
TAKEMURA H, DEGUCHI M, UEDA J, et al Slip-adaptive walk of quadruped robot[J]. Robotics and Autonomous Systems, 2005, 53 (2): 124- 141
doi: 10.1016/j.robot.2005.07.002
|
| 64 |
FOCCHI M, BARASUOL V, FRIGERIO M, et al Slip detection and recovery for quadruped robots[J]. Robotics Research, 2018, 2 (11): 185- 199
|
| 65 |
TESHIGAWARA S, SHIMIZU S, TADAKUMA K, et al. High sensitivity slip sensor using pressure conductive rubber [C]//IEEE Sensors. Christchurch: IEEE, 2009: 988-991.
|
| 1 |
CHAI H, LI Y, SONG R, et al A survey of the development of quadruped robots: joint configuration, dynamic locomotion control method and mobile manipulation approach[J]. Biomimetic Intelligence and Robotics, 2022, 2 (1): 100029
doi: 10.1016/j.birob.2021.100029
|
| 2 |
PIPERAKIS S, TRAHANIAS P. Non-linear ZMP based state estimation for humanoid robot locomotion[C]//IEEE-RAS 16th International Conference on Humanoid Robots. Cancun: IEEE, 2016: 202-209.
|
| 66 |
IWASAKI T, TAKESHITA T, ARINAGA Y, et al Shearing force measurement device with a built-in integrated micro displacement sensor[J]. Sensors and Actuators A: Physical, 2015, 221: 1- 8
|
| 67 |
JENELTEN F, HWANGBO J, TRESOLDI F, et al Dynamic locomotion on slippery ground[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4170- 4176
doi: 10.1109/LRA.2019.2931284
|
| 68 |
KOLVENBACH H, ARM P, HAMPP E, et al. Traversing steep and granular martian analog slopes with a dynamic quadrupedal robot [EB/OL]. (2021-06-03)[2023-10-08]. https://arxiv.org/pdf/2106.01974.
|
| 69 |
SHIRWATKAR A, KUMAR S, AMRUTUR B, et al. Realizing linear controllers for quadruped robots on planetary terrains [EB/OL]. [2023-10-08]. https://hex-plex.github.io/publication/exploration/exploration.pdf.
|
| 70 |
MAKOVIYCHUK V, WAWRZYNIAK L, GUO Y, et al. Isaac gym: high performance GPU-based physics simulation for robot learning [EB/OL]. (2021-08-25)[2023-10-08]. https://arxiv.org/pdf/2108.10470.
|
| 71 |
SIVA S, WIGNESS M, ROGERS J, et al. Enhancing consistent ground maneuverability by robot adaptation to complex off-road terrains [C]//Conference on Robot Learning. London: PMLR, 2022: 1200-1210.
|
| 72 |
HULAS J, ZHOU C. Improving quadrupedal locomotion on granular material using genetic algorithm [C]//Robots into the Real World. England: ResearchGate, 2020: 33-34.
|
| 73 |
AJEWOLE P O, MANUWA S I. Establishment of Bekker's model for predicting the pressure-sinkage behaviour of a loamy sand soil [EB/OL]. (2014-09)[2023-10-08]. https://www.researchgate.net/publication/267186683_Establishment_of_Bekker%27s_Model_for_Predicting_the_Pressure-Sinkage_Behaviour_of_a_Loamy_Sand_Soil.
|
| 74 |
AGUILAR J, GOLDMAN D I Robophysical study of jumping dynamics on granular media[J]. Nature Physics, 2016, 12 (3): 278- 283
doi: 10.1038/nphys3568
|
| 75 |
JOHNSON J B, DUVOY P X, KULCHITSKY A V, et al Analysis of Mars Exploration Rover wheel mobility processes and the limitations of classical terramechanics models using discrete element method simulations[J]. Journal of Terramechanics, 2017, 73: 61- 71
doi: 10.1016/j.jterra.2017.09.002
|
| 76 |
DEL PRETE A, NORI F, METTA G, et al. Control of contact forces: the role of tactile feedback for contact localization [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve: IEEE, 2012: 4048-4053.
|
| 77 |
DE LUCA A, MATTONE R. Sensorless robot collision detection and hybrid force/motion control [C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 999-1004.
|
| 78 |
DE LUCA A, ALBU-SCHAFFER A, HADDADIN S, et al. Collision detection and safe reaction with the DLR-III lightweight manipulator arm [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1623-1630.
|
| 79 |
VORNDAMME J, SCHAPPLER M, HADDADIN S. Collision detection, isolation and identification for humanoids [C]//IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 4754-4761.
|
| 80 |
MANUELLI L, TEDRAKE R. Localizing external contact using proprioceptive sensors: the contact particle filter [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 5062-5069.
|
| 81 |
BARASUOL V, FINK G, FOCCHI M, et al. On the detection and localization of shin collisions and reactive actions in quadruped robots [C]//International Conference on Climbing and Walking Robots. Kuala Lumpur: Scholars Archive, 2019: 49-51.
|
| 82 |
MORALES J, MARTINEZ J L, MANDOW A, et al Static tip-over stability analysis for a robotic vehicle with a single-axle trailer on slopes based on altered supporting polygons[J]. IEEE/ASME Transactions on Mechatronics, 2012, 18 (2): 697- 705
|
| 83 |
KIM H G, LEE D G, SEO T W Rolling stability enhancement via balancing tail for a water-running robot[J]. Journal of Bionic Engineering, 2015, 12 (3): 395- 405
doi: 10.1109/TSMC.1979.4310180
|
| 84 |
DIANSHENG C, SITONG L, XUANHAI L, et al. Stability analysis of a mobile health care robot [C]//IEEE International Conference on Real-time Computing and Robotics. Angkor Wat: IEEE, 2016: 591-596.
|
| 85 |
ZHU H, LUO M, MEI T, et al Energy-efficient bio-inspired gait planning and control for biped robot based on human locomotion analysis[J]. Journal of Bionic Engineering, 2016, 13 (2): 271- 282
doi: 10.1016/S1672-6529(16)60300-1
|
| 86 |
SARDAIN P, BESSONNET G Forces acting on a biped robot. center of pressure-zero moment point[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2004, 34 (5): 630- 637
doi: 10.1109/TSMCA.2004.832811
|
| 87 |
BELLICOSO C D, JENELTEN F, GEHRING C, et al Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 2261- 2268
doi: 10.1109/LRA.2018.2794620
|
| 88 |
KHORRAM M, MOOSAVIAN S A A. Balance recovery of a quadruped robot [C]//3rd RSI International Conference on Robotics and Mechatronics. Tehran: IEEE, 2015: 259-264.
|
| 89 |
CHEROUVIM N, PAPADOPOULOS E. Use of a novel multipart controller for the parametric study of a trotting quadruped robot [C]//IEEE International Conference on Robotics and Automation. Pasadena: IEEE, 2008: 805-810.
|
| 90 |
DI CARLO J, WENSING P M, KATZ B, et al. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 1-9.
|
| 91 |
BUCHANAN R, CAMURRI M, FALLON M. Haptic sequential Monte Carlo localization for quadrupedal locomotion in vision-denied scenarios [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2020: 3657-3663.
|
| 92 |
WISTH D, CAMURRI M, FALLON M VILENS: visual, inertial, lidar, and leg odometry for all-terrain legged robots[J]. IEEE Transactions on Robotics, 2022, 39 (1): 309- 326
|
| 93 |
LENS T, RADKHAH K, VON STRYK O. Simulation of dynamics and realistic contact forces for manipulators and legged robots with high joint elasticity [C]//15th International Conference on Advanced Robotics. Tallinn: IEEE, 2011: 34-41.
|
| 94 |
KOLVENBACH H, BREITENSTEIN M, GEHRING C, et al. Scalability analysis of legged robots for space exploration [C]//68th International Astronautical Congress. Adelaide: Curran, 2018: 10399-10413.
|
| 95 |
MUDALIGE N D W, NAZAROVA E, BABATAEV I, et al. Dogtouch: CNN-based recognition of surface textures by quadruped robot with high density tactile sensors [C]//IEEE 95th Vehicular Technology Conference. Helsinki: IEEE, 2022: 1-5.
|
| 96 |
SHI G, YAO C, WANG W, et al. Adaptive planar foot with compliant ankle joint and multi-modal sensing for quadruped robots [C]//IEEE International Conference on Robotics and Biomimetics. Xishuangbanna: IEEE, 2022: 52-57.
|
| 97 |
KOLVENBACH H, BARTSCHI C, WELLHAUSEN L, et al Haptic inspection of planetary soils with legged robots[J]. IEEE Robotics and Automation Letters, 2019, 4 (2): 1626- 1632
doi: 10.1109/LRA.2019.2896732
|
| 98 |
CHUAH M Y M, EPSTEIN L, KIM D, et al. Bi-modal hemispherical sensor: a unifying solution for three axis force and contact angle measurement [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau: IEEE, 2019: 7968-7975.
|
| 99 |
CHILIAN A, HIRSCHMULLER H, GORNER M. Multisensor data fusion for robust pose estimation of a six-legged walking robot [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 2497-2504.
|
| 100 |
MA J, BAJRACHARYA M, SUSCA S, et al Real-time pose estimation of a dynamic quadruped in GPS-denied environments for 24-hour operation[J]. The International Journal of Robotics Research, 2016, 35 (6): 631- 653
doi: 10.1177/0278364915587333
|
| 101 |
NOBILI S, CAMURRI M, BARASUOL V, et al. Heterogeneous sensor fusion for accurate state estimation of dynamic legged robots [C]//Robotics: Science and Systems. Cambridge: [s. n. ], 2017.
|
| 3 |
FOURMY M, FLAYOLS T, LEZIART P A, et al. Contact forces preintegration for estimation in legged robotics using factor graphs [C]//2021 IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 1372-1378.
|
| 4 |
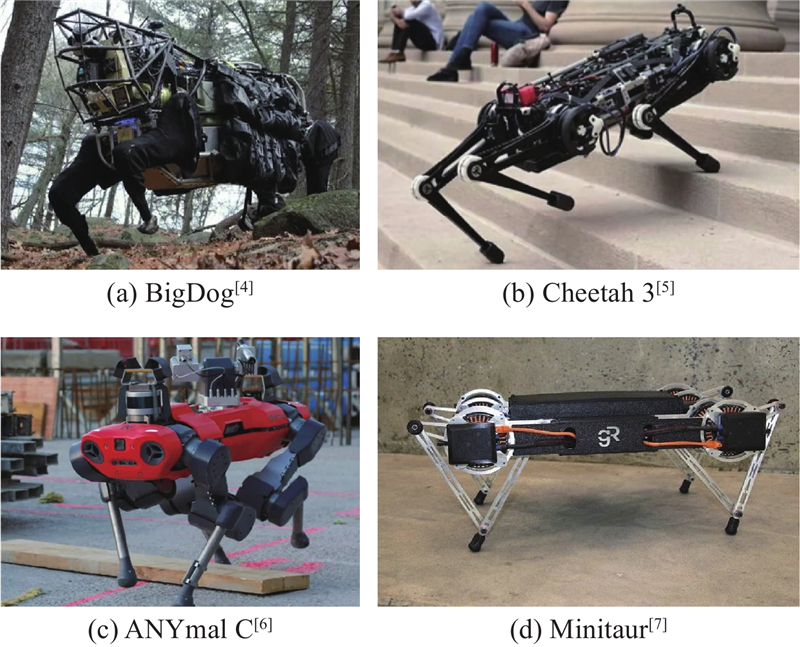
PLAYTER R, BUEHLER M, RAIBERT M. BigDog [C]//Unmanned Systems Technology VIII. Florida: SPIE, 2006: 896-901.
|
| 5 |
BLEDT G, POWELL M J, KATZ B, et al. Mit cheetah 3: design and control of a robust, dynamic quadruped robot [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 2245-2252.
|
| 6 |
SHI F, HOMBERGER T, LEE J, et al. Circus anymal: a quadruped learning dexterous manipulation with its limbs [C]//IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 2316-2323.
|
| 7 |
BLACKMAN D J, NICHOLSON J V, ORDONEZ C, et al. Gait development on minitaur, a direct drive quadrupedal robot [C]//Unmanned Systems Technology XVIII. Baltimore: SPIE, 2016: 141-155.
|
| 8 |
GARCIA E, DE SANTOS P G On the improvement of walking performance in natural environments by a compliant adaptive gait[J]. IEEE Transactions on Robotics, 2006, 22 (6): 1240- 1253
doi: 10.1109/TRO.2006.884343
|
| 9 |
ZHANG X, ZHENG H Walking up and down hill with a biologically-inspired postural reflex in a quadrupedal robot[J]. Autonomous Robots, 2008, 1 (25): 15- 24
|
| 10 |
HIROSE S, FUKUDA Y, YONEDA K, et al Quadruped walking robots at Tokyo Institute of Technology[J]. IEEE Robotics and Automation Magazine, 2009, 16 (2): 104- 114
doi: 10.1109/MRA.2009.932524
|
| 11 |
NELSON G, SAUNDERS A, NEVILLE N, et al Petman: a humanoid robot for testing chemical protective clothing[J]. Journal of the Robotics Society of Japan, 2012, 30 (1): 372- 377
|
| 12 |
KANEKO K, HARADA K, KANEHIRO F, et al. Humanoid robot HRP-3 [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice: IEEE, 2008: 2471-2478.
|
| 13 |
GRIFFIN R J, WIEDEBACH G, BERTRAND S, et al. Walking stabilization using step timing and location adjustment on the humanoid robot, atlas [C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver: IEEE, 2017: 667-673.
|
| 14 |
KATZ B, DI CARLO J, KIM S. Mini cheetah: a platform for pushing the limits of dynamic quadruped control [C]// International Conference on Robotics and Automation. Montreal: IEEE, 2019: 6295-6301.
|
| 15 |
SEMINI C, TSAGARAKIS N G, GUGLIELMINO E, et al Design of HyQ: a hydraulically and electrically actuated quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2011, 225 (6): 831- 849
doi: 10.1177/0959651811402275
|
| 16 |
BELLEGARDA G, CHEN Y, LIU Z, et al. Robust high-speed running for quadruped robots via deep reinforcement learning [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 10364-10370.
|
| 17 |
FERREIRA J, MOREIRA A P, SILVA M, et al. A survey on localization, mapping, and trajectory planning for quadruped robots in vineyards [C]//IEEE International Conference on Autonomous Robot Systems and Competitions. Santa Maria da Feira: IEEE, 2022: 237-242.
|
| 18 |
MURPHY M P, SAUNDERS A, MOREIRA C, et al The littledog robot[J]. The International Journal of Robotics Research, 2011, 30 (2): 145- 149
doi: 10.1177/0278364910387457
|
| 19 |
YANG C, YUAN K, ZHU Q, et al Multi-expert learning of adaptive legged locomotion[J]. Science Robotics, 2020, 5 (49): eabb2174
doi: 10.1126/scirobotics.abb2174
|
| 20 |
LIN J, DENG G, CHEN L, et al. Bionic architecture design and robust rough-terrain locomotion for a high-payload quadrupedal robot [C]//IEEE International Conference on Robotics and Biomimetics. Dali: IEEE, 2019: 1027-1034.
|
| 21 |
GOLDMAN D, KOMSUOGLU H, KODITSCHEK D March of the sandbots[J]. IEEE Spectrum, 2009, 46 (4): 30- 35
doi: 10.1109/MSPEC.2009.4808384
|
| 22 |
HIROSE S, KATO K. Study on quadruped walking robot in Tokyo Institute of Technology-past, present and future [C]//IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000: 414-419.
|
| 23 |
ALTENDORFER R, MOORE N, KOMSUOGLU H, et al Rhex: a biologically inspired hexapod runner[J]. Autonomous Robots, 2001, 11 (3): 207- 213
doi: 10.1023/A:1012426720699
|
| 24 |
MICHAUD F, LETOURNEAU D, ARSENAULT M, et al Multi-modal locomotion robotic platform using leg-track-wheel articulations[J]. Autonomous Robots, 2005, 18 (2): 137- 156
doi: 10.1007/s10514-005-0722-1
|
| 25 |
SANCHEZ C J, CHIU C W, ZHOU Y, et al Locomotion control of hybrid cockroach robots[J]. Journal of the Royal Society Interface, 2015, 12 (105): 20141363
doi: 10.1098/rsif.2014.1363
|
| 26 |
LUNECKAS M, LUNECKAS T, UDRIS D, et al A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots[J]. Intelligent Service Robotics, 2021, 14: 9- 24
|
| 27 |
DA X, XIE Z, HOELLER D, et al. Learning a contact-adaptive controller for robust, efficient legged locomotion [C]//Conference on Robot Learning. Cambridge: PMLR, 2021: 883-894.
|
| 28 |
JI Q, FU S, TAN K, et al Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning[J]. Robotics and Computer-Integrated Manufacturing, 2022, 78: 102382
doi: 10.1016/j.rcim.2022.102382
|
| 29 |
MURALIDHARAN S T, ZHU R, JI Q, et al. A soft quadruped robot enabled by continuum actuators [C]//IEEE 17th International Conference on Automation Science and Engineering. Lyon: IEEE, 2021: 834-840.
|
| 30 |
PARK I W, KIM J Y, LEE J, et al Mechanical design of the humanoid robot platform, HUBO[J]. Advanced Robotics, 2007, 21 (11): 1305- 1322
doi: 10.1163/156855307781503781
|
| 31 |
PARK I W, KIM J Y, LEE J, et al. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO) [C]//5th IEEE-RAS International Conference on Humanoid Robots. Tsukuba: IEEE, 2005: 321-326.
|
| 32 |
NIKONOVAS A, HARRISON A J L, HOULT S, et al The application of force-sensing resistor sensors for measuring forces developed by the human hand[J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2004, 218 (2): 121- 126
doi: 10.1243/095441104322984013
|
| 33 |
HOEPFLINGER M A, REMY C D, HUTTER M, et al. Haptic terrain classification for legged robots [C]//IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 2828-2833.
|
| 34 |
WU X A, HUH T M, MUKHERJEE R, et al Integrated ground reaction force sensing and terrain classification for small legged robots[J]. IEEE Robotics and Automation Letters, 2016, 1 (2): 1125- 1132
doi: 10.1109/LRA.2016.2524073
|
| 35 |
HUTTER M. StarlETH & Co. : design and control of legged robots with compliant actuation [D]. Zurich: Swiss Federal Institute of Technology Zurich, 2013.
|
| 36 |
CHUAH M Y, KIM S Enabling force sensing during ground locomotion: a bio-inspired, multi-axis, composite force sensor using discrete pressure mapping[J]. IEEE Sensors Journal, 2014, 14 (5): 1693- 1703
doi: 10.1109/JSEN.2014.2299805
|
| 37 |
TOMO T P, SOMLOR S, SCHMITZ A, et al Design and characterization of a three-axis hall effect-based soft skin sensor[J]. Sensors, 2016, 16 (4): 491
doi: 10.3390/s16040491
|
| 38 |
KOCO E, MIRKOVIC D, KOVACIC Z Hybrid compliance control for locomotion of electrically actuated quadruped robot[J]. Journal of Intelligent and Robotic Systems, 2019, 94 (3): 537- 563
|
| 39 |
YUAN W, DONG S, ADELSON E H Gelsight: high-resolution robot tactile sensors for estimating geometry and force[J]. Sensors, 2017, 17 (12): 2762
doi: 10.3390/s17122762
|
| 40 |
TENZER Y, JENTOFT L P, HOWE R D The feel of MEMS barometers: inexpensive and easily customized tactile array sensors[J]. IEEE Robotics and Automation Magazine, 2014, 21 (3): 89- 95
doi: 10.1109/MRA.2014.2310152
|
| 41 |
GUGGENHEIM J W, JENTOFT L P, TENZER Y, et al Robust and inexpensive six-axis force–torque sensors using MEMS barometers[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22 (2): 838- 844
doi: 10.1109/TMECH.2017.2654446
|
| 42 |
ZU L, WEN J, WANG S, et al Multiangle, self-powered sensor array for monitoring head impacts[J]. Science Advances, 2023, 9 (20): 5152
doi: 10.1126/sciadv.adg5152
|
| 43 |
TALEBI S, POULAKAKIS I, PAPADOPOULOS E, et al. Quadruped robot running with a bounding gait [C]//Experimental Robotics VII. Hawaii: [s. n. ], 2001: 281-289.
|
| 44 |
NAM H, XU Q, HONG D. A reliable low-cost foot contact sensor for legged robots [C]//2020 17th International Conference on Ubiquitous Robots. Kyoto: IEEE, 2020: 219-224.
|
| 45 |
BLOESCH M, GEHRING C, FANKHAUSER P, et al. State estimation for legged robots on unstable and slippery terrain [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 6058-6064.
|
| 46 |
FALLON M F, ANTONE M, ROY N, et al. Drift-free humanoid state estimation fusing kinematic, inertial and lidar sensing [C]//IEEE-RAS International Conference on Humanoid Robots. Madrid: IEEE, 2014: 112-119.
|
| 47 |
ROTELLA N, SCHAAL S, RIGHETTI L. Unsupervised contact learning for humanoid estimation and control [C]//IEEE International Conference on Robotics and Automation. Brisbane: IEEE, 2018: 411-417.
|
| 48 |
PIPERAKIS S, KOSKINOPOULOU M, TRAHANIAS P Nonlinear state estimation for humanoid robot walking[J]. IEEE Robotics and Automation Letters, 2018, 3 (4): 3347- 3354
doi: 10.1109/LRA.2018.2852788
|
| 49 |
WANG R, ZHAO J, WANG J. Torque compensation model and touchdown detection model of the hydraulic quadruped robot controlled by VMC [C]//34th Chinese Control and Decision Conference. Hefei: IEEE, 2022: 3937-3943.
|
| 50 |
ORTENZI V, LIN H C, AZAD M, et al. Kinematics-based estimation of contact constraints using only proprioception [C]//2016 IEEE-RAS 16th International Conference on Humanoid Robots. Cancun: IEEE, 2016: 1304-1311.
|
| 51 |
BLOESCH M, HUTTER M, HOEPFLINGER M A, et al State estimation for legged robots-consistent fusion of leg kinematics and IMU[J]. Robotics, 2013, 17: 17- 24
|
| 52 |
HARTLEY R, GHAFFARI M, EUSTICE R M, et al Contact-aided invariant extended Kalman filtering for robot state estimation[J]. The International Journal of Robotics Research, 2020, 39 (4): 402- 430
doi: 10.1177/0278364919894385
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|