定义RTK-GPS传感器测量飞行模块坐标系下待对接目标的位姿为 ${[{x}_{\mathrm{r}},{y}_{\mathrm{r}},{v}_{{x}_{\mathrm{r}}},{v}_{{y}_{\mathrm{r}}},{z}_{\mathrm{r}},{\theta }_{\mathrm{r}}]}^{\mathrm{T}}$ $ {\theta }_{\mathrm{r}} $ ${[{u}_{\mathrm{s}},{v}_{\mathrm{s}}]}^{\mathrm{T}}$ ${[{x}_{{t}},{y}_{{t}},{z}_{{t}},{\theta }_{{{\rm{r}}}}]}^{\mathrm{T}}$ . 卡尔曼滤波(Kalman filter, KF)数据融合过程如图6 所示,以IMU加速度测量值 ${[{\alpha }_{{x}},{\alpha }_{{y}}]}^{\mathrm{T}}$ ${\boldsymbol{u}}_{{t}}$ ${[{x}_{\mathrm{r}},{y}_{\mathrm{r}},{v}_{{x}_{\mathrm{r}}},{v}_{{y}_{\mathrm{r}}},{z}_{\mathrm{r}},{\theta }_{\mathrm{r}}]}^{\mathrm{T}}$
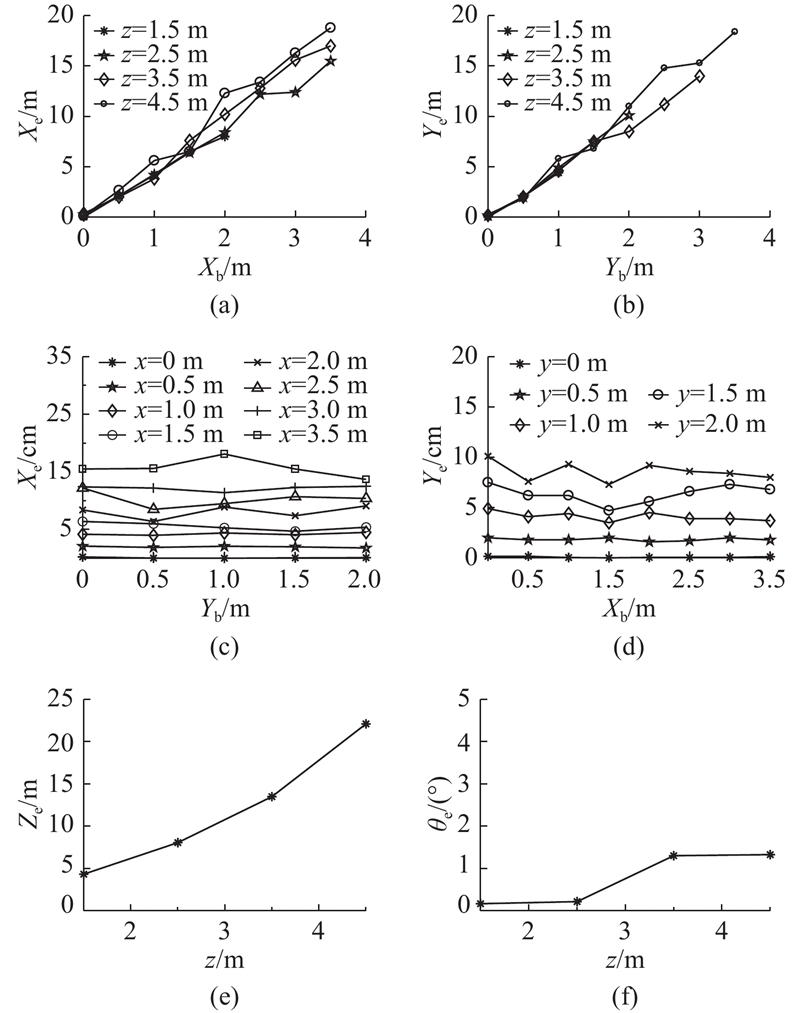
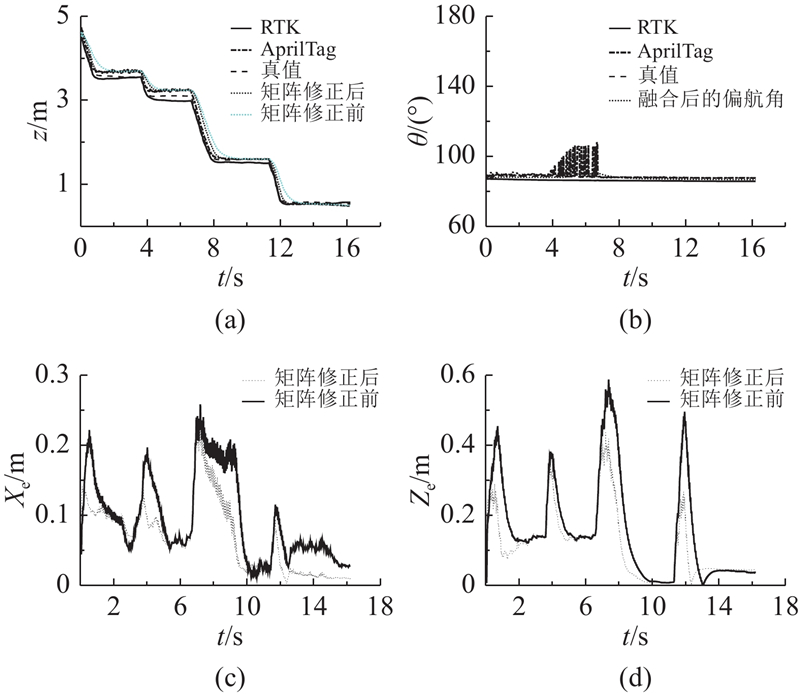
在Gazebo仿真软件中进行取点采样,设置位于X 轴上的取样点为 $\{\mathrm{0,0.5,1.0},\mathrm{1.5,2.0},\mathrm{2.5,3.0},3.5\} $ Y 轴上的取样点位 $ \{\mathrm{0,0.5,1.0},\mathrm{1.5,2.0},\mathrm{2.5,3.0},3.5\} $ Z 轴上的取样点位为 $\{\mathrm{1.5,2.5,3.5,4.5}\} $ 图7 所示,其中X e 、Y e 、Z e 和 $ {\theta }_{\mathrm{e}} $ X b 和Y b 为横向和纵向的偏移量. 可以得出,AprilTag解算出来的X 、Y 方向位置精度随着高度以及各自方向的偏移量的增大而增大,且误差值近似趋于线性增长,在相同偏移量、不同高度条件下的X 、Y 方向定位误差的变化较小. 还可以得出,在不同Y 方向偏移量下的X 方向定位误差基本呈水平线状,波动不大,其影响程度远小于不同X 方向偏移量以及高度z 带来的影响. 同样的,在不同Y 方向偏移量下的Y 方向定位误差变化也不明显. 从采样数据中发现,不同X 、Y 方向的偏移量对Z e 、 $ {\theta }_{\mathrm{e}} $ Z 方向定位误差平均值,得到图7 (e),从中得出Z 方向的定位误差随着高度的增大而增大,且误差值也近似趋于线性增长. 取各个不同高度层数据的偏航定位误差平均值,得到图7 (f),可以看出偏航误差基本不随高度的增大而变化.
[2]
SASAKI T, HIDAKA M, TOMITA Y, et al. Proximity operation and automated docking on HTV-X: guidance, navigation, and control strategy [C]// 2022 IEEE Aerospace Conference . Big Sky: IEEE, 2022: 1-10.
[本文引用: 1]
[3]
VOLPE R, CIRCI C Optical-aided, autonomous and optimal space rendezvous with a non-cooperative target
[J]. Acta Astronautica , 2019 , 157 : 528 - 540
DOI:10.1016/j.actaastro.2019.01.020
[4]
MCMAHON J W, GEHLY S, AXELRAD P. Enhancing relative attitude and trajectory estimation for autonomous rendezvous using flash LIDAR [C]// AIAA/AAS Astrodynamics Specialist Conference . San Diego: [s.n.], 2014: 4359.
[5]
SORNSIN B A, SHORT B W, BOURBEAU T N, et al. Global shutter solid state flash lidar for spacecraft navigation and docking applications [C]// Laser Radar Technology and Applications XXIV . [S.l.]: SPIE, 2019.
[本文引用: 1]
[6]
SHI K, LIU C, BIGGS J D, et al Observer-based control for spacecraft electromagnetic docking
[J]. Aerospace Science and Technology , 2020 , 99 : 105759
DOI:10.1016/j.ast.2020.105759
[本文引用: 1]
[7]
YAZDANI A M, SAMMUT K, YAKIMENKO O, et al A survey of underwater docking guidance systems
[J]. Robotics and Autonomous Systems , 2020 , 124 : 103382
DOI:10.1016/j.robot.2019.103382
[本文引用: 1]
[8]
WANG T, ZHAO Q, YANG C Visual navigation and docking for a planar type AUV docking and charging system
[J]. Ocean Engineering , 2021 , 224 : 108744
DOI:10.1016/j.oceaneng.2021.108744
[9]
VANDAVASI B N J, ARUNACHALAM U, NARAYANASWAMY V, et al Concept and testing of an electromagnetic homing guidance system for autonomous underwater vehicles
[J]. Applied Ocean Research , 2018 , 73 : 149 - 159
DOI:10.1016/j.apor.2018.02.003
[10]
PALOMERAS N, VALLICROSA G, MALLIOS A, et al AUV homing and docking for remote operations
[J]. Ocean Engineering , 2018 , 154 : 106 - 120
DOI:10.1016/j.oceaneng.2018.01.114
[11]
MATIAS B, OLIVEIRA H, ALMEIDA J, et al. High-accuracy low-cost RTK-GPS for an unmanned surface vehicle [C]// Oceans 2015-Genova . Genova: IEEE, 2015.
[本文引用: 1]
[12]
HENKEL P, SPERL A. Real-time kinematic positioning for unmanned air vehicles [C]// 2016 IEEE Aerospace Conference . Big Sky: IEEE, 2016: 1-7
[本文引用: 1]
[13]
KANG Y, PARK B J, CHO A, et al A precision landing test on motion platform and shipboard of a tilt-rotor UAV based on RTK-GNSS
[J]. International Journal of Aeronautical and Space Sciences , 2018 , 19 (4 ): 994 - 1005
DOI:10.1007/s42405-018-0081-8
[本文引用: 1]
[14]
CUI T, GUO C, LIU Y, et al. Precise landing control of UAV based on binocular visual SLAM [C]// 2021 4th International Conference on Intelligent Autonomous Systems . Wuhan: IEEE, 2021: 312-317.
[本文引用: 2]
[15]
CHEN C, CHEN S, HU G, et al An auto-landing strategy based on pan-tilt based visual servoing for unmanned aerial vehicle in GNSS-denied environments
[J]. Aerospace Science and Technology , 2021 , 116 : 106891
DOI:10.1016/j.ast.2021.106891
[16]
席志鹏, 楼卓, 李晓霞, 等 集中式光伏电站巡检无人机视觉定位与导航
[J]. 浙江大学学报: 工学版 , 2019 , 53 (5 ): 880 - 888
XI Zhi-peng, LOU Zhuo, LI Xiao-xia, et al Vision-based localization and navigation for UAV inspection in photovoltaic farms
[J]. Journal of Zhejiang University: Engineering Science , 2019 , 53 (5 ): 880 - 888
[17]
苏贇, 王挺, 姚辰, 等 基于合作目标的无人机目标跟踪方法
[J]. 机器人 , 2019 , 41 (4 ): 425 - 432
DOI:10.13973/j.cnki.robot.180479
SU Yun, WANG Ting, YAO Chen, et al A target tracking method of UAV based on cooperative target
[J]. Robot , 2019 , 41 (4 ): 425 - 432
DOI:10.13973/j.cnki.robot.180479
[18]
张咪, 赵勇, 布树辉, 等 基于阶层标识的无人机自主精准降落系统
[J]. 航空学报 , 2018 , 39 (10 ): 322150
DOI:10.7527/S1000-6893.2018.22150
[本文引用: 1]
ZHANG Mi, ZHAO Yong, BU Shu-hui, et al Mutil-level marker based autonomous landing system for UAVs
[J]. Acta Aeronautica et Astronautica Sinica , 2018 , 39 (10 ): 322150
DOI:10.7527/S1000-6893.2018.22150
[本文引用: 1]
[19]
ARORA S, JAIN S, SCHERER S, et al. Infrastructure-free shipdeck tracking for autonomous landing [C]// 2013 IEEE International Conference on Robotics and Automation . Karlsruhe: IEEE, 2013: 323-330.
[本文引用: 1]
[20]
ARIANTE G, PAPA U, PONTE S, et al. UAS for positioning and field mapping using LIDAR and IMU sensors data: Kalman filtering and integration [C]// 2019 IEEE 5th International Workshop on Metrology for AeroSpace . Turin: IEEE, 2019: 522-527.
[本文引用: 1]
[21]
XU Y, SHMALIY Y S, AHN C K, et al Tightly coupled integration of INS and UWB using fixed-lag extended UFIR smoothing for quadrotor localization
[J]. IEEE Internet of Things Journal , 2020 , 8 (3 ): 1716 - 1727
[本文引用: 1]
[22]
CHENG C, LI X, XIE L, et al Autonomous dynamic docking of UAV based on UWB-vision in GPS-denied environment
[J]. Journal of the Franklin Institute , 2022 , 359 (7 ): 2788 - 2809
DOI:10.1016/j.jfranklin.2022.03.005
[本文引用: 2]
[23]
MARCON P, JANOUSEK J, KADLEC R. Vision-based and differential global positioning system to ensure precise autonomous landing of UAVs [C]// 2018 Progress in Electromagnetics Research Symposium . Wuhan: IEEE, 2018: 542-546.
[本文引用: 1]
[24]
KROGIUS M, HAGGENMILLER A, OLSON E. Flexible layouts for fiducial tags [C]// 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems . [S.l.]: IEEE, 2019: 1898-1903.
[本文引用: 1]
[25]
KIM J, WOO S, KIM K. Lidar-guided autonomous landing of an aerial vehicle on a ground vehicle [C]// 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence . Jeju: IEEE, 2017: 228-231.
[本文引用: 1]
[26]
RAHMAN S, RAHMAN M M, ABDULLAH-AL-WADUD M, et al. An adaptive gamma correction for image enhancement [J]. EURASIP Journal on Image and Video Processing , 2016: 35.
[本文引用: 1]
Flying car transportation system: Advances, techniques, and challenges
1
2021
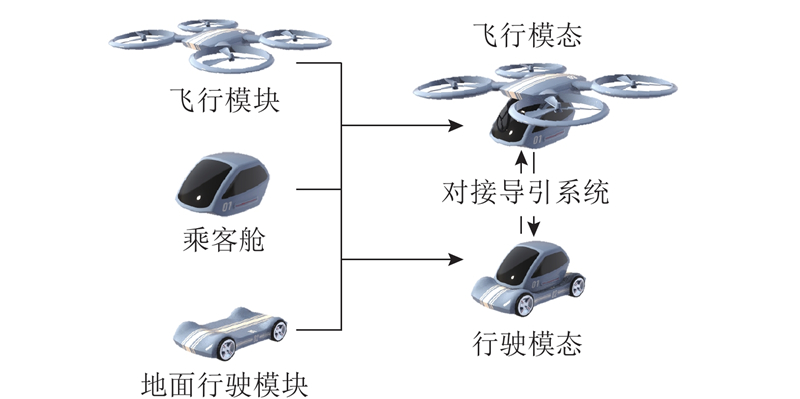
... 分体式飞行汽车凭借其模块化设计、便捷式运行模态切换的特点成为未来城市间立体化交通的重要组成部分,将在缓解城市交通运输压力、减少出行时间方面发挥巨大作用[1 ] . 分体式飞行汽车共包含3个部分:飞行模块、乘客舱、地面行驶模块,其中飞行模块与乘客舱结合组成飞行模态,地面行驶模块与乘客舱结合组成地面行驶模态. 飞行模态与地面行驶模态之间的全自主转换依靠对接导引系统(分体式飞行汽车的关键技术之一),全自主对接导引系统的主要技术难点在于全自主、全天候、高精度和高可靠性的要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
Optical-aided, autonomous and optimal space rendezvous with a non-cooperative target
0
2019
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
Observer-based control for spacecraft electromagnetic docking
1
2020
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
A survey of underwater docking guidance systems
1
2020
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
Visual navigation and docking for a planar type AUV docking and charging system
0
2021
Concept and testing of an electromagnetic homing guidance system for autonomous underwater vehicles
0
2018
AUV homing and docking for remote operations
0
2018
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
A precision landing test on motion platform and shipboard of a tilt-rotor UAV based on RTK-GNSS
1
2018
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
2
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
... [14 ]利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
An auto-landing strategy based on pan-tilt based visual servoing for unmanned aerial vehicle in GNSS-denied environments
0
2021
集中式光伏电站巡检无人机视觉定位与导航
0
2019
集中式光伏电站巡检无人机视觉定位与导航
0
2019
基于阶层标识的无人机自主精准降落系统
1
2018
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
基于阶层标识的无人机自主精准降落系统
1
2018
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
Tightly coupled integration of INS and UWB using fixed-lag extended UFIR smoothing for quadrotor localization
1
2020
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
Autonomous dynamic docking of UAV based on UWB-vision in GPS-denied environment
2
2022
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
... [22 ]设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
... 对接导引系统广泛应用于航天器交会对接、水下自主机器人(autonomous underwater vehicle, AUV)回收、无人机精准导引降落等任务领域. 基于差分卫星定位导航、视觉导引以及雷达测距的航天器对接导引系统[2 -5 ] 在自主交会对接中表现出良好的性能,电磁对接[6 ] 能够在不消耗航天器推进剂的情况下实现自主对接. 水下AUV对接导引系统常用的定位传感器主要包含声学、光学、电磁等类型[7 -11 ] . 在无人机精准导引降落技术领域,常用的技术方案包括全球定位系统(global positioning system, GPS )[12 -13 ] 、视觉[14 -18 ] 、激光雷达[19 -20 ] 、超宽带(ultra wide band,UWB)[21 -22 ] 等. Cui等[14 ] 利用快速特征提取结合基于网格的运动统计策略提出改进的双目定位与建图系统,在仿真试验中成功完成4.8 m×1.2 m跑道上的降落任务. Cheng等[22 ] 设计基于UWB视觉传感器的自主动态导航方法,提出在GPS失效环境下实现无人机对接移动目标的三阶段方法,但是该方法通信距离短且设备成本较高. Marcon等[23 ] 成功进行多次基于实时动态差分全球定位系统(real time kinematic global positioning system, RTK-GPS)模块的飞行器导引降落试验,降落偏差均值为12.4 cm. Krogius等[24 ] 提出靶标系统识别双重嵌套的AprilTag标识,实现0.08~16.15 m高度范围的无人机导引降落,由于其标识尺寸为90.2 cm×90.2 cm,无法适用于窄小平台的自主导引降落任务. Kim等[25 ] 在垂直方向上通过评估每个分割段的空间接近度对激光雷达的点云数据进行聚类,成功定位到无人机点云集群,完成无人机在移动平台上的导引降落;但是激光雷达通常占用的空间较大且成本较高,对机载设备的处理性能也有一定要求. ...
1
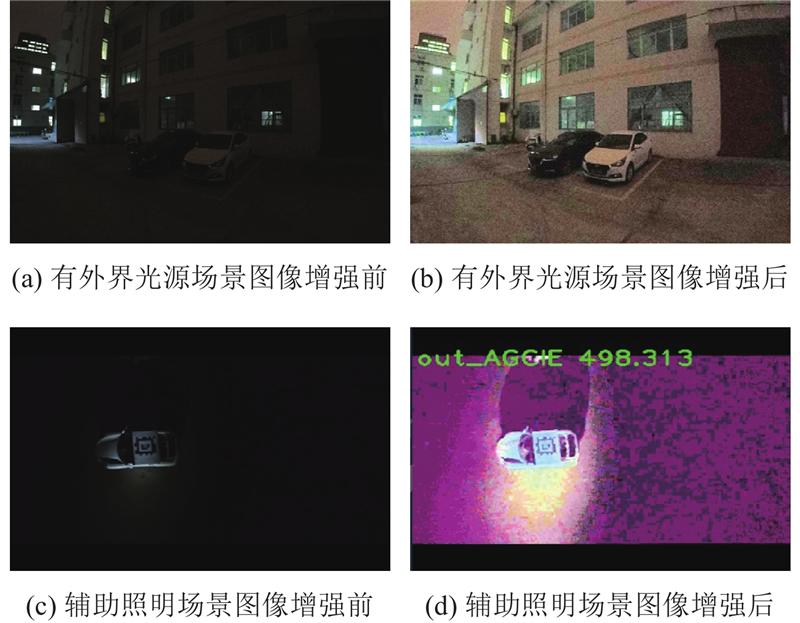
... 针对低照度环境下,视觉图像亮度低、对比度小、噪声大、细节可视性差等因素导致的视觉目标检测的精度下降问题,将轻量化的自适应伽马校正暗光图像增强算法(adaptive gamma correction for image enhancement, AGCIE)[26 ] 引入,对摄像头输入的视频流信息进行预处理,伽马校正过程表示为 ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}