|
|
|
| Time-event hybrid-triggered output feedback control for vehicle platoons |
Panpan YANG( ),Changzheng LIANG,Maode YAN,Yuhang MENG ),Changzheng LIANG,Maode YAN,Yuhang MENG |
| School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
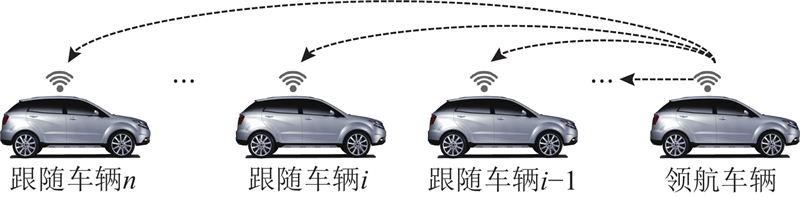
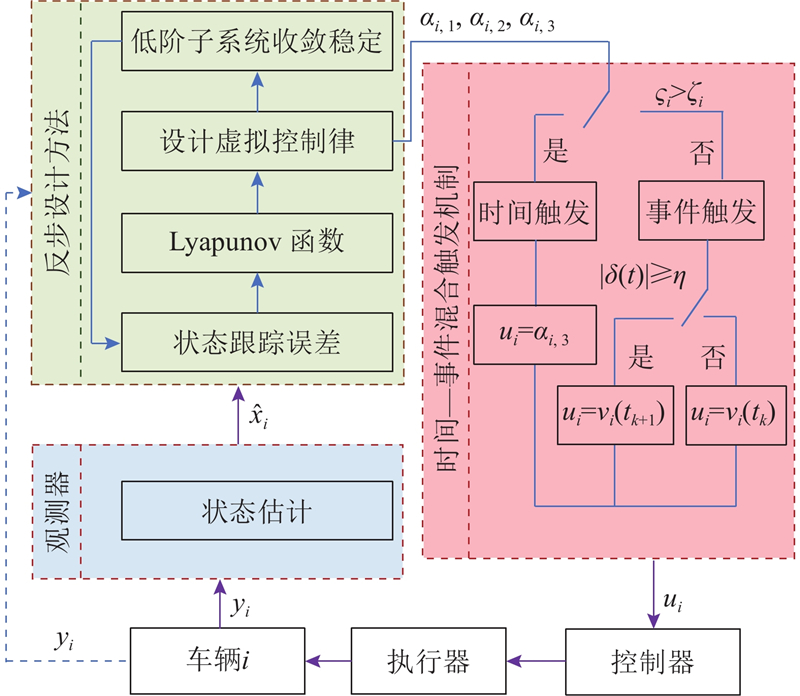
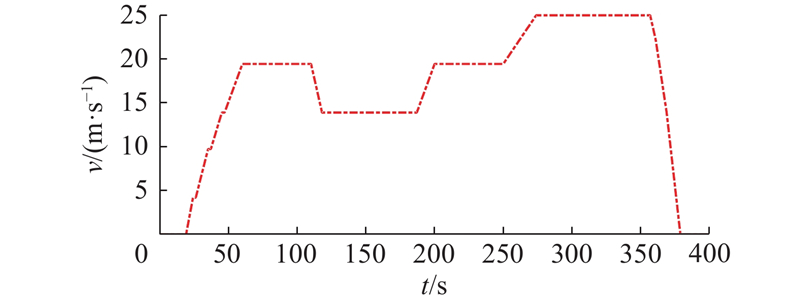
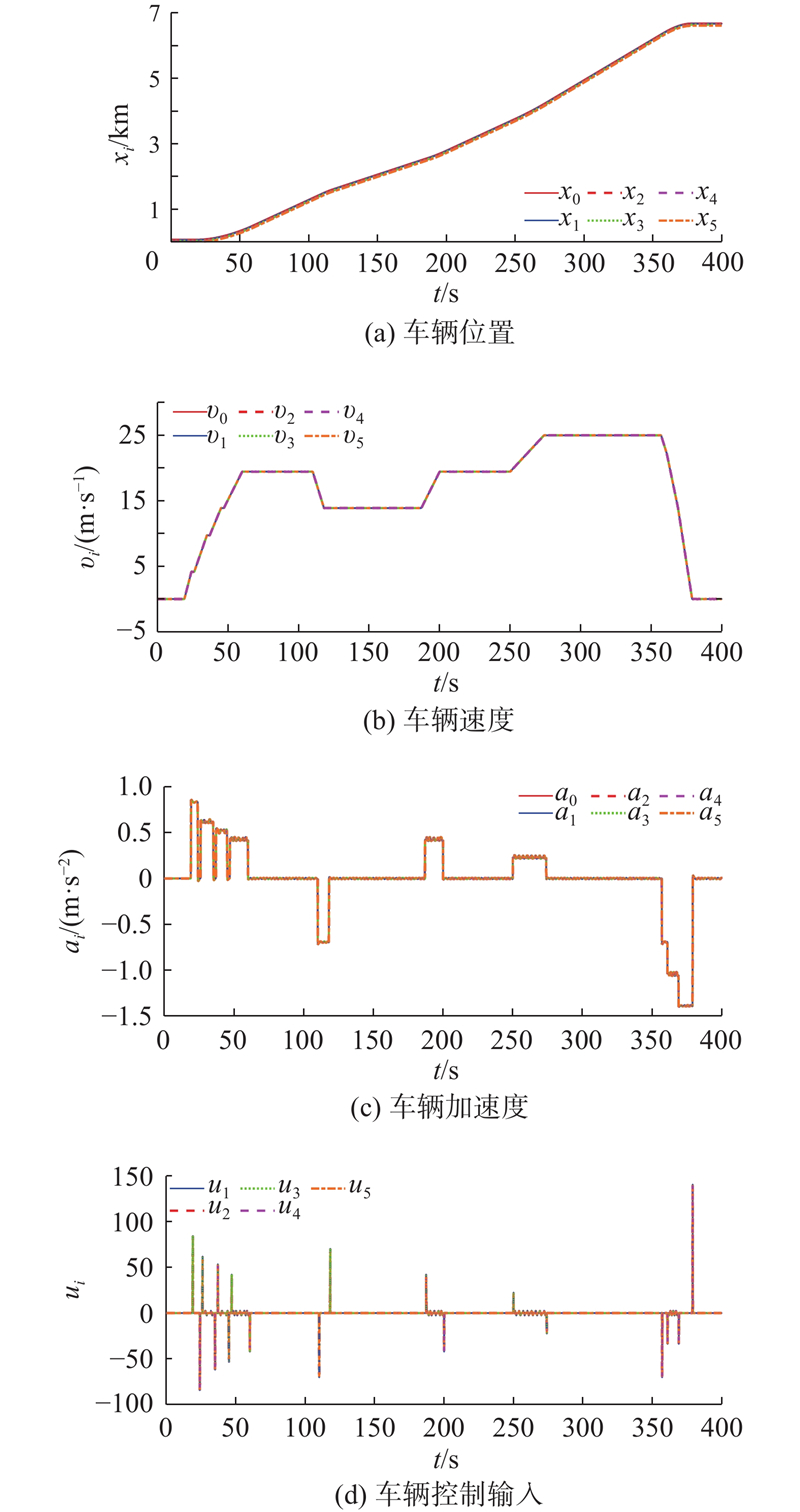
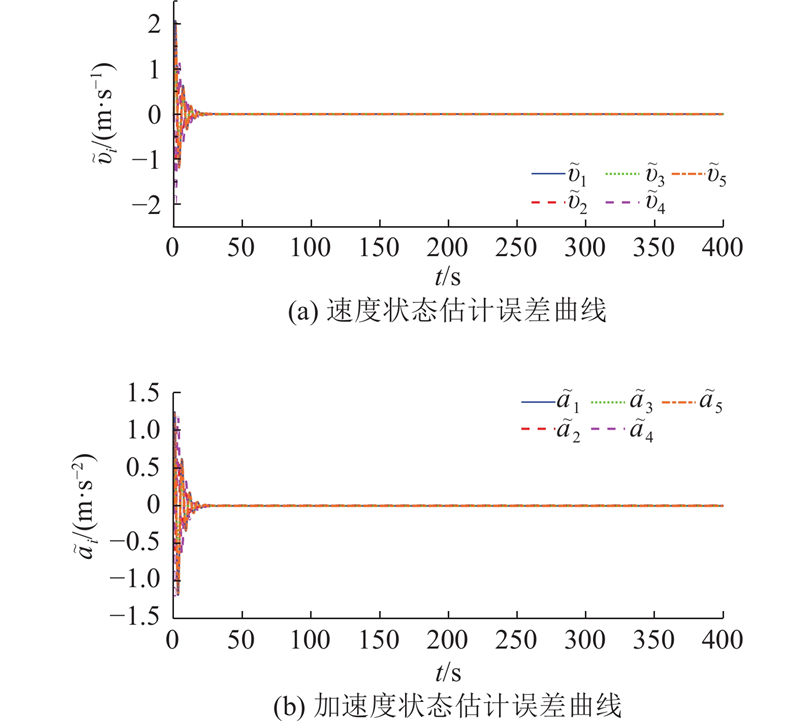
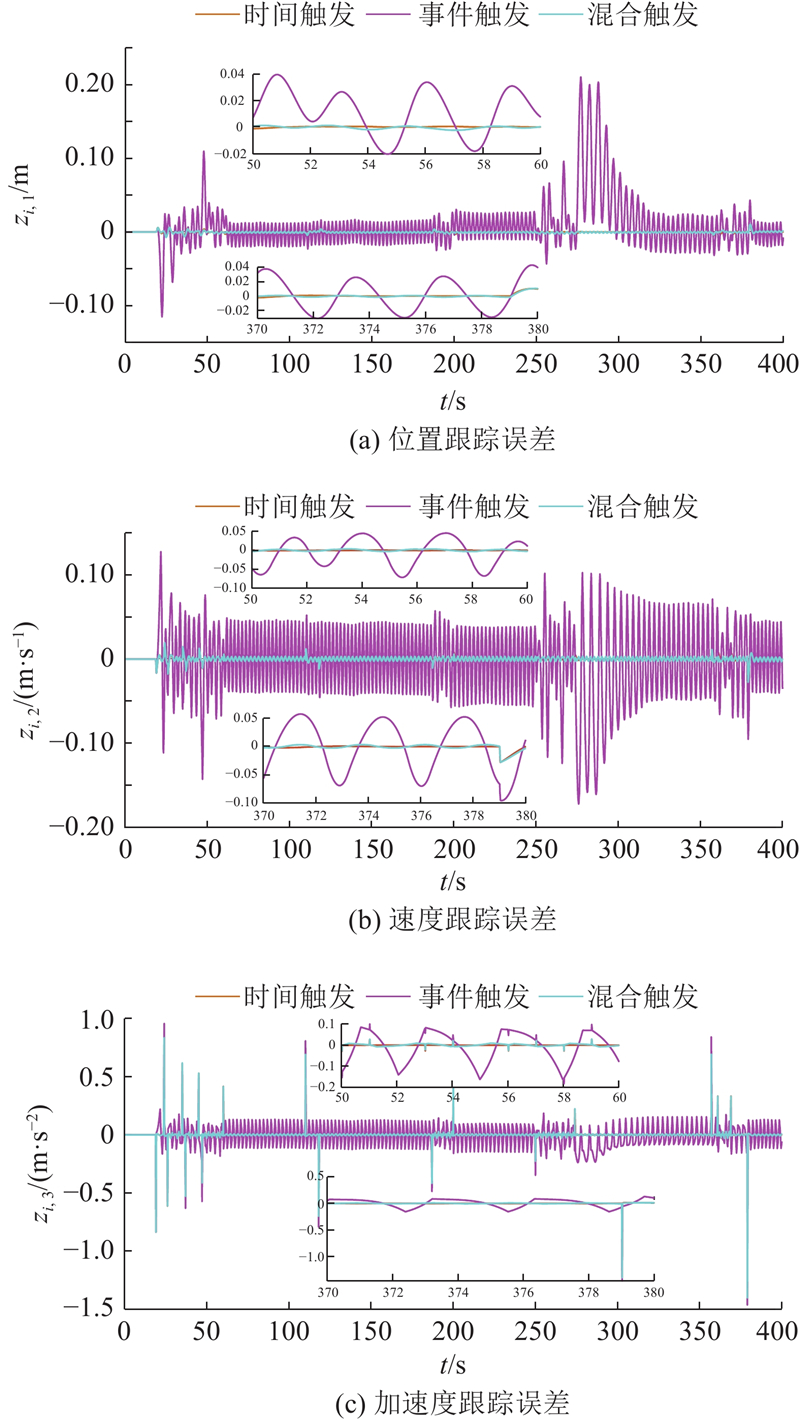
Abstract The time-event hybrid-triggered output feedback control method for vehicle platoons was proposed in consideration of the unmeasurable partial state information and the balance between control performance and communication resources. For the unknown states of vehicles due to sensor cost and data acquisition accuracy, an observer that estimates the unknown velocity and acceleration from position was designed, achieving an arbitrarily small reconstruction error. A novel time-event hybrid-triggered mechanism was developed: the time-triggered mechanism was applied in a state fluctuation process to achieve the convergence of the tracking error, and the system switched to the event-triggered fashion in a steady state to reduce the communication resources. By employing the backstepping control technique, an output-feedback controller was devised to achieve platoon control using only position information. The stability of the proposed method and the avoidance of the Zeno phenomenon using the time-event hybrid-triggered mechanism were demonstrated through theoretical analysis. Simulation results under the extra urban driving cycle (EUDC) show that, compared with the single time/event-triggered mechanism, the proposed method maintains platoon control performance while significantly reducing communication resources.
|
|
Received: 12 February 2025
Published: 03 February 2026
|
|
|
| Fund: 国家自然科学基金资助项目(52372406);陕西省重点研发计划资助项目(2024GX-YBXM-258). |
基于时间-事件混合触发的车辆队列输出反馈控制
针对车辆部分状态信息不可测量,并考虑控制性能与通信资源的平衡问题,提出基于时间-事件混合触发的车辆队列输出反馈控制方法. 考虑传感器成本及数据获取精度导致的车辆部分状态信息不可测量问题,利用车辆位置信息设计状态观测器对无法测量的速度、加速度信息进行估计,使估计误差趋近于任意小的重构误差. 提出时间-事件混合触发机制,当车辆运动状态波动较大时,采用时间触发机制降低系统跟踪误差;当车辆稳态运动时,切换至事件触发机制以节省通信资源. 设计基于反步法的输出反馈控制器,实现仅基于车辆位置信息的队列控制. 理论分析证明,所提方法性能稳定,使用时间-事件混合触发机制能够有效排除芝诺(Zeno)行为. 在市郊驾驶循环(EUDC)工况下的仿真实验结果表明,相较于单一的时间或事件触发方式,所提方法能够在保证车辆队列控制性能的同时显著节省通信资源.
关键词:
车辆队列,
时间-事件混合触发,
输出反馈,
状态观测器,
反步控制
|
|
| [1] |
YUE W, LI C, MAO G, et al Evolution of road traffic congestion control: a survey from perspective of sensing, communication, and computation[J]. China Communications, 2021, 18 (12): 151- 177
doi: 10.23919/JCC.2021.12.010
|
|
|
| [2] |
CAO M, LI V O K, SHUAI Q DeepGAL: intelligent vehicle control for traffic congestion alleviation at intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24 (7): 6836- 6848
doi: 10.1109/TITS.2023.3257199
|
|
|
| [3] |
LIU X, YAN M, YANG P, et al Unknown input observer based neuro-adaptive fault-tolerant control for vehicle platoons with sensor fault and output quantization[J]. Control Engineering Practice, 2024, 150: 106007
doi: 10.1016/j.conengprac.2024.106007
|
|
|
| [4] |
宋家成, 闫茂德, 杨盼盼, 等 基于数据驱动的鲁棒反步自适应巡航控制[J]. 浙江大学学报: 工学版, 2022, 56 (3): 485- 493
SONG Jiacheng, YAN Maode, YANG Panpan, et al Robust backstepping adaptive cruise control based on data-driven[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (3): 485- 493
doi: 10.3785/j.issn.1008-973X.2022.03.007
|
|
|
| [5] |
ZHU Y, LI Y, ZENG K, et al Finite-time cooperative control for vehicle platoon with sliding-mode controller and disturbance observer[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25 (9): 10679- 10688
doi: 10.1109/TITS.2024.3418631
|
|
|
| [6] |
HU M, WANG X, BIAN Y, et al Disturbance observer-based cooperative control of vehicle platoons subject to mismatched disturbance[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (4): 2748- 2758
doi: 10.1109/TIV.2023.3237703
|
|
|
| [7] |
VARGAS F J, GORDON M A, PETERS A A, et al On stochastic string stability with applications to platooning over additive noise channels[J]. Automatica, 2025, 171: 111923
doi: 10.1016/j.automatica.2024.111923
|
|
|
| [8] |
LIU G, LIU Y, XIE X Consensus of linear discrete-time connected autonomous vehicle systems with time delays and multiplicative noise[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25 (5): 3523- 3534
doi: 10.1109/TITS.2023.3330823
|
|
|
| [9] |
BERNARD P, ANDRIEU V, ASTOLFI D Observer design for continuous-time dynamical systems[J]. Annual Reviews in Control, 2022, 53: 224- 248
doi: 10.1016/j.arcontrol.2021.11.002
|
|
|
| [10] |
ZHOU Q, XU X, LIU L, et al Output feedback stabilization of linear systems with infinite distributed input and output delays[J]. Information Sciences, 2021, 576: 54- 67
doi: 10.1016/j.ins.2021.06.060
|
|
|
| [11] |
JIANG S, WANG S, ZHAN Z, et al Containment control of discrete-time multi-agent systems with application to escort control of multiple vehicles[J]. International Journal of Robust and Nonlinear Control, 2022, 32 (12): 6913- 6938
doi: 10.1002/rnc.6176
|
|
|
| [12] |
WANG C, WANG D, PENG Z Distributed output-feedback control of unmanned container transporter platooning with uncertainties and disturbances using event-triggered mechanism[J]. IEEE Transactions on Vehicular Technology, 2022, 71 (1): 162- 170
doi: 10.1109/TVT.2021.3130006
|
|
|
| [13] |
ZHANG H, LIU J, WANG Z, et al Distributed adaptive event-triggered control and stability analysis for vehicular platoon[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22 (3): 1627- 1638
doi: 10.1109/TITS.2020.2974280
|
|
|
| [14] |
范利蓉, 王芳, 周超, 等 状态时延和全状态约束下的多智能体系统自适应事件触发控制[J]. 控制与决策, 2022, 37 (4): 892- 902
FAN Lirong, WANG Fang, ZHOU Chao, et al Adaptive event-triggered control for multi-agent systems with state time-delays and full state constraints[J]. Control and Decision, 2022, 37 (4): 892- 902
doi: 10.13195/j.kzyjc.2020.1046
|
|
|
| [15] |
YANG P, WANG X, CHEN X, et al Fixed time event-triggered control for high-order nonlinear uncertain systems with time-varying full state constraints[J]. International Journal of Robust and Nonlinear Control, 2024, 34 (1): 703- 727
doi: 10.1002/rnc.6998
|
|
|
| [16] |
KANG W, LIU C X Event-triggered stabilization for large-scale interconnected systems with time delays[J]. International Journal of Robust and Nonlinear Control, 2022, 32 (13): 7469- 7487
doi: 10.1002/rnc.6225
|
|
|
| [17] |
GUO T, LIU Y Connectivity-preserving consensus: an adaptive event-triggered strategy[J]. International Journal of Robust and Nonlinear Control, 2024, 34 (6): 3912- 3928
doi: 10.1002/rnc.7169
|
|
|
| [18] |
SHI X, YAN H, XU C Improved adaptive dynamic event-triggered consensus of multi-agent systems[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 70 (12): 4509- 4513
|
|
|
| [19] |
WANG J, GUO J, LI K, et al Distributed adaptive event-triggered control of connected automated vehicle platoon systems with spoofing cyber attacks[J]. IEEE Transactions on Vehicular Technology, 2024, 73 (12): 18186- 18197
doi: 10.1109/TVT.2024.3436052
|
|
|
| [20] |
XU T, SUN Z, WEN G, et al Data-driven dynamic event-triggered control[J]. IEEE Transactions on Automatic Control, 2024, 69 (12): 8804- 8811
doi: 10.1109/TAC.2024.3417088
|
|
|
| [21] |
WANG W, WANG C, WANG Z, et al Nonlinear consensus-based autonomous vehicle platoon control under event-triggered strategy in the presence of time delays[J]. Applied Mathematics and Computation, 2021, 404: 126246
doi: 10.1016/j.amc.2021.126246
|
|
|
| [22] |
CHEN X, YIN L Y, LIU Y T, et al Hybrid-triggered consensus for multi-agent systems with time-delays, uncertain switching topologies, and stochastic cyber-attacks[J]. Chinese Physics B, 2019, 28 (9): 090701
doi: 10.1088/1674-1056/ab38a8
|
|
|
| [23] |
DING L, HAN Q L, GE X, et al An overview of recent advances in event-triggered consensus of multiagent systems[J]. IEEE Transactions on Cybernetics, 2018, 48 (4): 1110- 1123
doi: 10.1109/TCYB.2017.2771560
|
|
|
| [24] |
LIU J, WU Z G, YUE D, et al Stabilization of networked control systems with hybrid-driven mechanism and probabilistic cyber attacks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51 (2): 943- 953
doi: 10.1109/TSMC.2018.2888633
|
|
|
| [25] |
LIAN Z, SHI P, LIM C C Dynamic hybrid-triggered-based fuzzy control for nonlinear networks under multiple cyberattacks[J]. IEEE Transactions on Fuzzy Systems, 2022, 30 (9): 3940- 3951
doi: 10.1109/TFUZZ.2021.3134745
|
|
|
| [26] |
谭伟, 刘景升, 祖晖, 等 参数不确定和扰动下智能汽车路径跟踪控制[J]. 浙江大学学报: 工学版, 2023, 57 (4): 702- 711
TAN Wei, LIU Jingsheng, ZU Hui, et al Intelligent vehicle path tracking control under parametric uncertainties and external disturbances[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (4): 702- 711
doi: 10.3785/j.issn.1008-973X.2023.04.007
|
|
|
| [27] |
WANG J, LUO X, YAN J, et al Distributed integrated sliding mode control for vehicle platoons based on disturbance observer and multi power reaching law[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (4): 3366- 3376
doi: 10.1109/TITS.2020.3035764
|
|
|
| [28] |
POLYCARPOU M M, IOANNOU P A A robust adaptive nonlinear control design[J]. Automatica, 1996, 32 (3): 423- 427
doi: 10.1016/0005-1098(95)00147-6
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|