|
|
|
| Robust backstepping adaptive cruise control based on data-driven |
Jia-cheng SONG1( ),Mao-de YAN1,*(),Pan-pan YANG1,Yong-feng JU1,Jing-fei YUE2 ),Mao-de YAN1,*(),Pan-pan YANG1,Yong-feng JU1,Jing-fei YUE2 |
1. School of Electronic and Control Engineering, Chang’an University, Xi’an 710064, China
2. Shaanxi Automobile Holding Group Limited Company, Xi’an 710200, China |
|
|
|
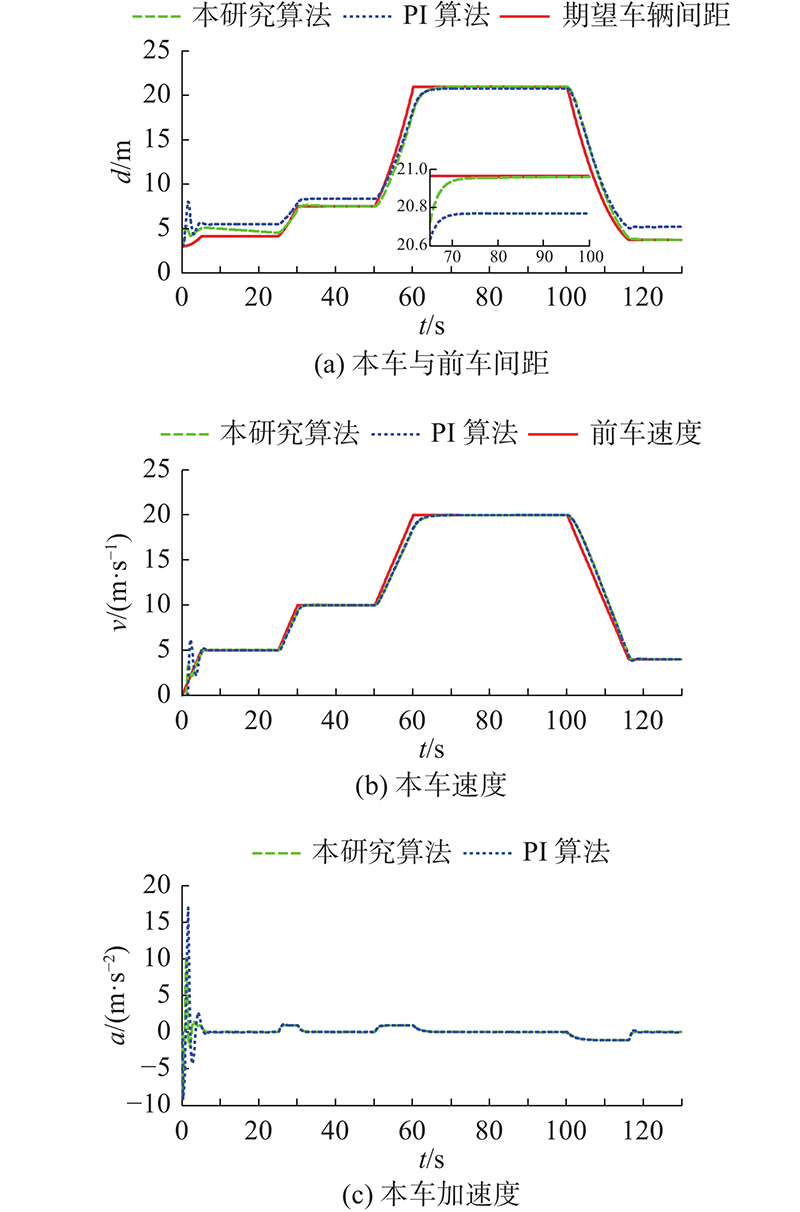
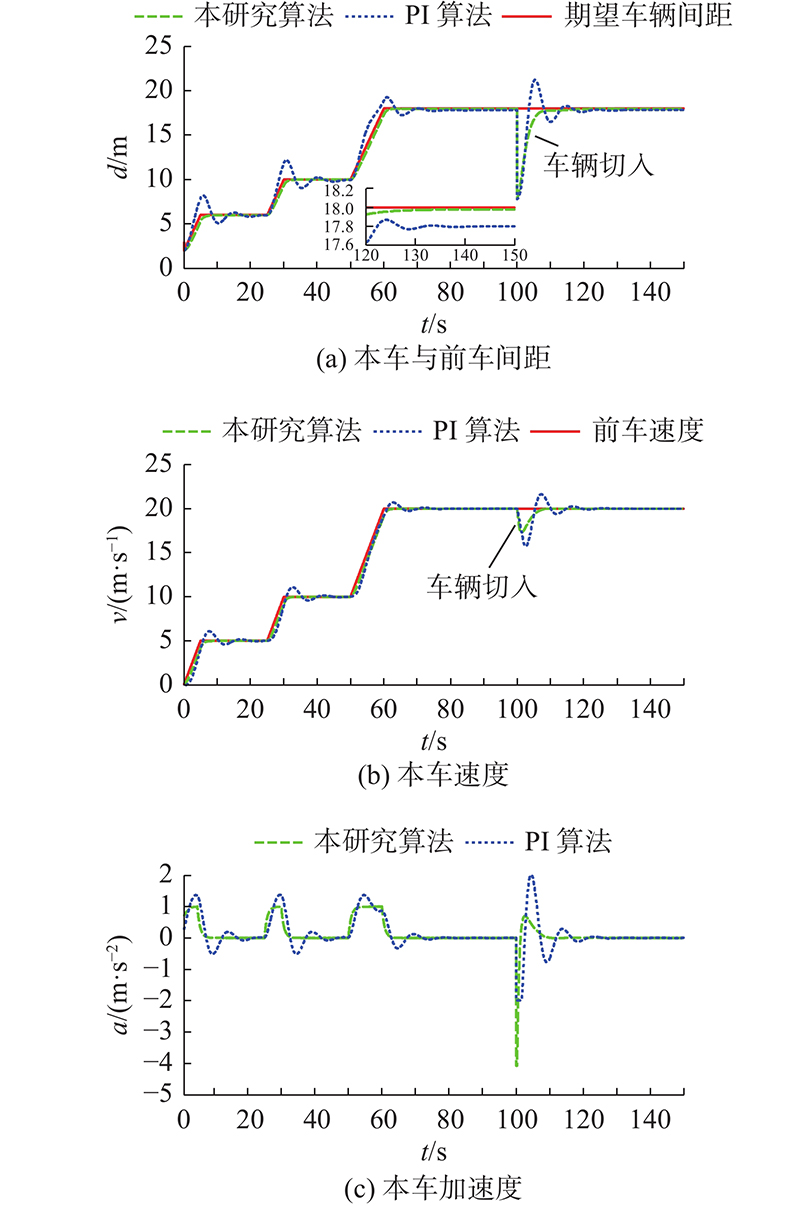
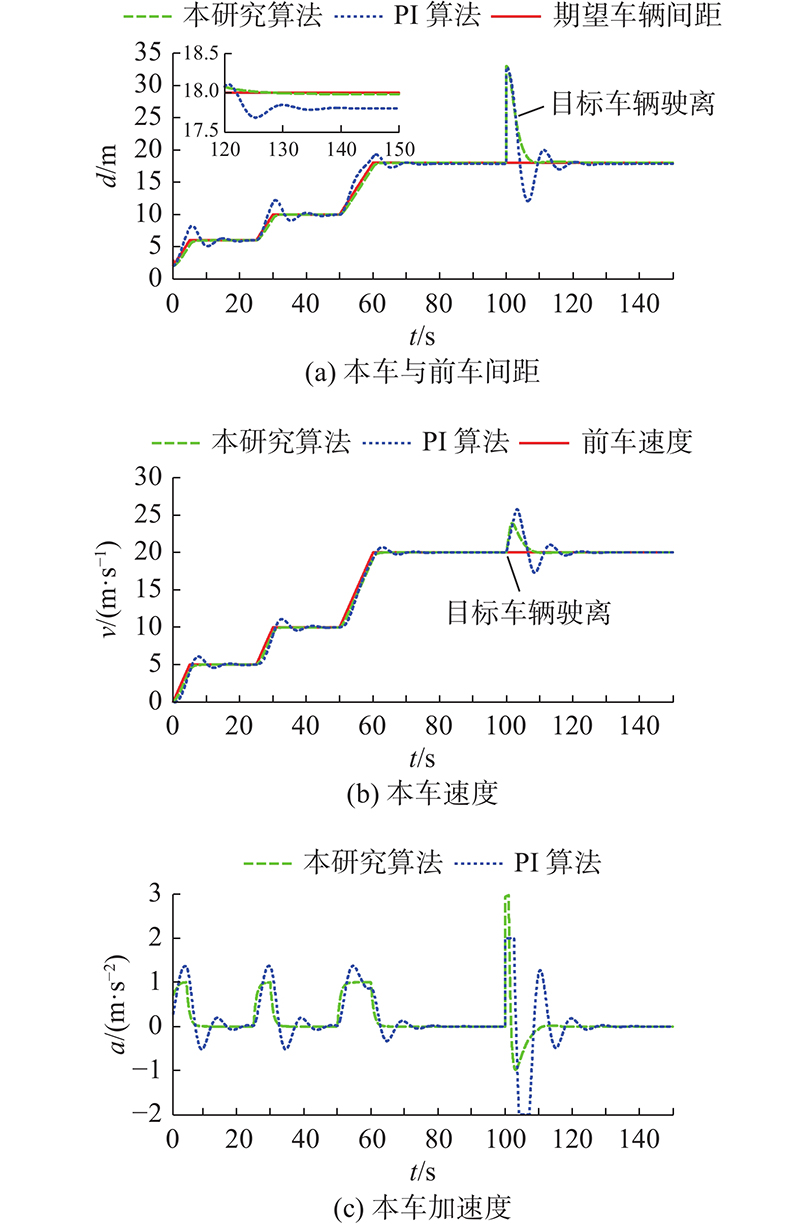
Abstract A data-driven robust backstepping adaptive cruise control (ACC) algorithm was proposed to achieve high-precision robust ACC. First of all, a virtual controller was designed to convert the vehicle spacing control into speed control by using the backstepping technology, avoiding the coupling of speed and spacing control brought by the speed-dependent spacing strategy. Secondly, a data-based coupling sliding mode surface and state observer were constructed to compensate for the vehicle’s complex nonlinear dynamics, the discrete errors and the external disturbances, and the robustness of the control algorithm was improved. Then, a data-driven robust ACC algorithm was designed using feedback control and robust control techniques. Finally, the proposed ACC algorithm and the PI-based ACC were used for vehicle adaptive cruise tracking simulation verification with two spacing strategies (constant time headway and varying time headway). The superiority of the designed algorithm in terms of control accuracy and robustness are shown by the experimental results.
|
|
Received: 12 April 2021
Published: 29 March 2022
|
|
|
| Fund: 国家自然科学基金资助项目(61803040);陕西省重点研发计划资助项目(2019GY-218);中央高校基本科研业务费资助项目(300102320720) |
|
Corresponding Authors:
Mao-de YAN
E-mail: jiacheng.song@chd.edu.cn;mdyan@chd.edu.cn
|
基于数据驱动的鲁棒反步自适应巡航控制
为了实现高精度的鲁棒自适应巡航控制(ACC),提出基于数据驱动的鲁棒反步自适应巡航控制算法. 利用反步技术设计虚拟控制器,将车辆间距控制转化为速度控制,避免速度相关型间距策略带来的间距与速度控制耦合;构建基于数据的耦合滑模面并设计状态观测器,补偿车辆复杂的非线性动力学特性、离散误差及外部干扰,提升控制算法的鲁棒性;利用反馈控制及鲁棒控制技术设计数据驱动的ACC鲁棒控制算法;分别选取固定时间间距、变时间间距策略,利用所提ACC算法及基于比例积分(PI)的ACC算法进行车辆自适应巡航控制对比仿真验证. 对比实验结果表明,所提算法在控制精度、鲁棒性方面具有优越性.
关键词:
自适应巡航控制,
数据驱动,
鲁棒控制,
反步控制,
间距策略
|
|
| [1] |
吴光强, 张亮修, 刘兆勇, 等 汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报:自然科学版, 2017, 45 (4): 544- 553
WU Guang-qiang, ZHANG Liang-xiu, LIU Zhao-yong, et al Research status and development trend of vehicle adaptive cruise control systems[J]. Journal of Tongji University: Natural Science, 2017, 45 (4): 544- 553
|
|
|
| [2] |
秦严严, 王昊, 王炜, 等 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17 (3): 121- 130
QIN Yan-yan, WANG Hao, WANG Wei, et al Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17 (3): 121- 130
doi: 10.3969/j.issn.1671-1637.2017.03.013
|
|
|
| [3] |
黄晶, 韦伟, 邹德飚 基于个性化间距策略的自适应巡航系统模式切换策略研究[J]. 汽车工程, 2020, 42 (10): 1302- 1311
HUANG Jing, WEI Wei, ZOU De-biao Research on multi-mode switching strategy of adaptive cruise control system based on personalized spacing strategy[J]. Automotive Engineering, 2020, 42 (10): 1302- 1311
|
|
|
| [4] |
初亮, 李天骄, 孙成伟 面向再生制动优化的电动车自适应巡航控制策略[J]. 浙江大学学报:工学版, 2017, 51 (8): 1596- 1602
CHU Liang, LI Tian-jiao, SUN Cheng-wei Research on adaptive cruise control strategy for electric vehicle based on optimization of regenerative braking[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (8): 1596- 1602
|
|
|
| [5] |
罗莉华, 龚李龙, 李平, 等 考虑驾驶员行驶特性的双模式自适应巡航控制设计[J]. 浙江大学学报:工学版, 2011, 45 (12): 2073- 2078
LUO Li-hua, GONG Li-long, LI Ping, et al Two-mode adaptive cruise control design with humans’ driving habits consideration[J]. Journal of Zhejiang University: Engineering Science, 2011, 45 (12): 2073- 2078
|
|
|
| [6] |
IOANNOU P A, CHIEN C C Autonomous intelligent cruise control[J]. IEEE Transactions on Vehicular Technology, 1993, 42 (4): 657- 672
doi: 10.1109/25.260745
|
|
|
| [7] |
YAN M D, SONG J C, YANG P P, et al. Distributed adaptive sliding mode control for vehicle platoon with uncertain driving resistance [C]// 2017 36th Chinese Control Conference (CCC). Dalian: IEEE, 2017: 9396-9400.
|
|
|
| [8] |
孙天骏. 基于学习控制的汽车全速自适应巡航决策与控制算法研究[D]. 长春: 吉林大学, 2020: 12.
SUN Tian-jun. Research on decision and control algorithm for vehicle full-speed adaptive cruise based on learning control [D]. Changchun: Jilin University, 2020: 12.
|
|
|
| [9] |
MILANES V, VILLAGRA J, GODOY J, et al Comparing fuzzy and intelligent PI controllers in stop-and-go manoeuvres[J]. IEEE Transactions on Control Systems Technology, 2012, 20 (3): 770- 778
doi: 10.1109/TCST.2011.2135859
|
|
|
| [10] |
GANJI B, KOUZANI A Z, SUI Y K, et al Adaptive cruise control of a HEV using sliding mode control[J]. Expert Systems with Application, 2014, 41 (2): 607- 615
doi: 10.1016/j.eswa.2013.07.085
|
|
|
| [11] |
KIM H, YI K Design of a model reference cruise control algorithm[J]. SAE International Journal of Passenger Cars-Electronic and Electrical Systems, 2012, 5 (2): 440- 449
doi: 10.4271/2012-01-0492
|
|
|
| [12] |
王斌, 王仁广, 何玮, 等 汽车ACC系统可变输出论域模糊控制算法[J]. 计算机应用研究, 2010, 27 (2): 465- 465
WANG Bin, WANG Guang-ren, HE Wei, et al Fuzzy control algorithm on variable output domain in automotive ACC system[J]. Application research of computers, 2010, 27 (2): 465- 465
doi: 10.3969/j.issn.1001-3695.2010.02.016
|
|
|
| [13] |
施绍有, 高峰, 杜发荣, 等 起-停车辆巡航系统的建模与仿真[J]. 中国公路学报, 2007, 20 (3): 115- 120
SHI Shao-you, GAO Feng, DU Fa-rong, et al Modeling and simulation of stop-and-go vehicle cruise system[J]. China Journal of Highway and Transport, 2007, 20 (3): 115- 120
doi: 10.3321/j.issn:1001-7372.2007.03.021
|
|
|
| [14] |
李升波, 王建强, 李克强, 等 MPC实用化问题处理及在车辆ACC中的应用[J]. 清华大学学报:自然科学版, 2010, 50 (5): 645- 648
LI Sheng-bo, WANG Jian-qiang, LI Ke-qiang, et al Processing of MPC practical problems and its application to vehicular adaptive cruise control systems[J]. Journal of Tsinghua University: Science and Technology, 2010, 50 (5): 645- 648
|
|
|
| [15] |
郭戈, 岳伟. 智能交通系统中的车辆协作控制[M]. 北京: 机械工业出版社, 2016: 1.
|
|
|
| [16] |
LIDSTR?M K, SJ?BERG K, H?LMBERG U, et al A modular CACC system integration and design[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13 (3): 1050- 1061
doi: 10.1109/TITS.2012.2204877
|
|
|
| [17] |
NIEUWENHUIJZE M, KEULEN T V, ONCU S, et al Cooperative driving with a heavy-duty truck in mixed traffic: experimental results[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13 (3): 1026- 1032
doi: 10.1109/TITS.2012.2202230
|
|
|
| [18] |
LEVENT G, ISMAIL M C U, KERIM K, et al Cooperative adaptive cruise control implementation of Team Mekar at the grand cooperative driving challenge[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 12 (3): 1062- 1074
|
|
|
| [19] |
FURDA A, VLACIC L Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making[J]. IEEE Intelligent Transportation Systems Magazine, 2011, 3 (1): 4- 17
doi: 10.1109/MITS.2011.940472
|
|
|
| [20] |
CHONG L, ABBAS M M, MEDINA F A, et al A rule-based neural network approach to model driver naturalistic behavior in traffic[J]. Transportation Research Part C, 2013, 32 (4): 207- 223
|
|
|
| [21] |
郑睿. 基于增强学习的无人车辆智能决策方法研究[D]. 长沙: 国防科学技术大学, 2013: 1-3.
ZHENG Rui. Reinforcement learning-based intelligent decision-making methods for unmanned vehicles [D]. Changsha: National University of Defense Technology, 2013: 1-3.
|
|
|
| [22] |
严伟. 仿驾驶员速度跟随行为的自适应巡航控制算法研究[D]. 长春: 吉林大学, 2016: 34.
YAN Wei. Study on adaptive cruise control algorithms imitating car-following behaviors of drivers [D]. Changchun: Jilin University, 2016: 34.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|