|
|
|
| Detection method for spillage risk vehicle considering cross-level feature fusion |
Yongfu HE( ),Shiwei XIE,Jialu YU,Siyu CHEN ),Shiwei XIE,Jialu YU,Siyu CHEN |
| College of Traffic and Transportation, Chongqing Jiaotong University, Chongqing 400074, China |
|
|
|
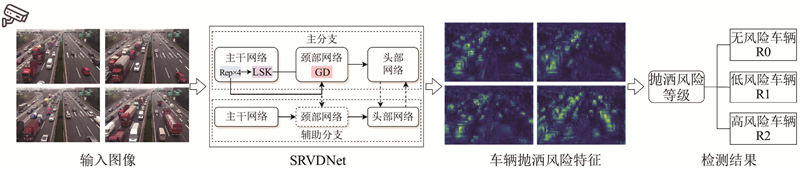
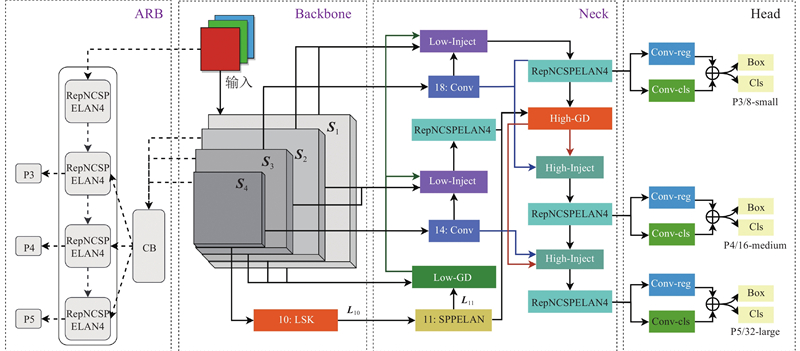
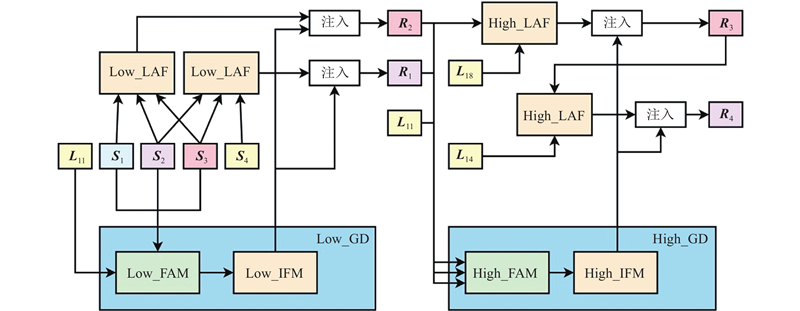
Abstract An original spillage risk vehicle detection method called spillage risk vehicles detection network (SRVDNet) was proposed faced with the challenge of detecting spillage risk vehicles, specifically designed for high-speed freight, to resolve the issues which insufficient extraction of spillage risk vehicle features and inadequate fusion of deep features in existing methods. A backbone network incorporating large separable kernel was introduced to enhance the network’s learning capabilities for spillage risk features in freight vehicles. A neck network integrating feature gather-and-distribute mechanisms was introduced to provide the detection head with richer information such as freight carriage types, tarpaulin edge textures and cargo shape contours. The proposed method was validated using a real high-speed highway freight vehicle dataset. The experimental results demonstrate that SRVDNet exhibits superior performance, achieving a detection accuracy of 81.5%. SRVDNet shows improvements of 3.70%, 3.09%, 2.86%, 1.37%, 1.41%, 2.00%, respectively, in terms of mAP@0.5 metrics compared with existing state-of-the-art (SOTA) object detection algorithms such as YOLOv5, YOLOv6, YOLOv8, RT-DETR, PP-YOLOE, YOLOv9. The model parameters were relatively smaller, while detection speed remains high. This method effectively enhances the ability to identify spillage risks in scenarios with irregular cargo loading, low cargo volume, and full cargo loads, thereby contributing to source control of spills and strengthening the capability for early warning of safety risks on highways.
|
|
Received: 29 May 2024
Published: 11 February 2025
|
|
|
| Fund: 国家自然科学基金青年科学基金资助项目(52202490);重庆市教委科学技术研究资助项目(KJQN202000735);重庆交通大学校内科学基金课题资助项目(20JDKJC-A023). |
考虑跨层特征融合的抛洒风险车辆检测方法
面对货运车辆抛洒风险检测的难题,针对现有方法存在的抛洒风险关键特征提取能力不足、特征跨层融合不充分的问题,提出面向货运车辆的抛洒风险检测方法(SRVDNet). 骨干网络引入大核可选择性感受野机制,增强网络对货运车辆抛洒风险特征的学习能力. 颈部网络引入聚集-分发特征融合机制,实现特征跨层融合,为检测头提供丰富的车厢类型、篷布边缘细节纹理、货物轮廓形状等信息. 采用真实的高速公路货运车辆数据集,验证所提方法的效果. 实验结果表明,SRVDNet表现出更优的性能,检测精度达到81.5%,与YOLOv5、YOLOv6、YOLOv8、RT-DETR、PP-YOLOE、YOLOv9等车辆检测SOTA方法相比,mAP@0.5分别提升了3.70%、3.09%、2.86%、1.37%、1.41%、2.00%,且模型参数量相对较小,检测速度较高,有效提升了在货物装载不规则、少量货物和满载货物等场景下的抛洒风险识别能力,有助于抛洒物的源头治理,增强高速公路安全风险的识别预警能力.
关键词:
智能交通,
抛洒风险检测,
目标检测,
车辆检测,
跨层特征融合
|
|
| [3] |
GUO Enqiang, FU Xinsha Dropped object detection method based on feature similarity learning[J]. Journal of South China University of Technology: Natural Science Edition, 2023, 51 (6): 30- 41
|
|
|
| [4] |
CHEN G, CHEN K, ZHANG L J, et al VCANet: vanishing-point-guided context-aware network for small road object detection[J]. Automotive Innovation, 2021, 4 (4): 400- 412
doi: 10.1007/s42154-021-00157-x
|
|
|
| [5] |
曹行健, 张志涛, 孔彦赞, 等 面向智慧交通的图像处理与边缘计算[J]. 中国图像图形学报, 2021, 27 (6): 1743- 1766
CAO Xingjian, ZHANG Zhitao, KONG Yanzan, et al The review of image processing and edge computing for intelligent transportation system[J]. Journal of Image Graphics, 2021, 27 (6): 1743- 1766
|
|
|
| [6] |
邵延华, 张铎, 楚红雨, 等 基于深度学习的YOLO目标检测综述[J]. 电子与信息学报, 2022, 44 (10): 3697- 3705
SHAO Yanhua, ZHANG Duo, CHU Hongyu, et al A review of YOLO object detection based on deep learning[J]. Journal of Electronics and Information Technology, 2022, 44 (10): 3697- 3705
doi: 10.11999/JEIT210790
|
|
|
| [7] |
王潇, 李子琦, 高涛, 等 基于无损跨尺度特征融合的交通目标检测算法[J]. 中国公路学报, 2023, 36 (9): 315- 325
WANG Xiao, LI Ziqi, GAO Tao, et al Traffic target detection algorithm based on non-loss cross-scale feature fusion[J]. China Journal of Highway and Transport, 2023, 36 (9): 315- 325
|
|
|
| [8] |
WANG H, YU Y, CAI Y, et al Soft-weighted-average ensemble vehicle detection method based on single-stage and two-stage deep learning models[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6 (1): 100- 109
|
|
|
| [9] |
WANG Z, ZHAN J, DUAN C, et al A review of vehicle detection techniques for intelligent vehicles[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34 (8): 3811- 3831
doi: 10.1109/TNNLS.2021.3128968
|
|
|
| [10] |
张念, 张亮 基于深度学习的公路货车车型识别[J]. 交通运输工程学报, 2023, 23 (1): 268- 279
ZHANG Nian, ZHANG Liang Type recognition of highway trucks based on deep learning[J]. Journal of Traffic and Transportation Engineering, 2023, 23 (1): 268- 279
|
|
|
| [11] |
马永杰, 马芸婷, 程时升, 等 基于改进 YOLOv3 模型与 Deep-SORT 算法的道路车辆检测方法[J]. 交通运输工程学报, 2021, 21 (2): 222- 231
MA Yongjie, MA Yunting, CHENG Shisheng, et al Road vehicle detection method based on improved YOLOv3 model and Deep-SORT algorithm[J]. Journal of Traffic and Transportation Engineering, 2021, 21 (2): 222- 231
|
|
|
| [1] |
蒋来 浅谈高速公路抛洒物危害与对策[J]. 道路交通管理, 2021, 39 (4): 36- 37
JIANG Lai Talking about hazard and countermeasure of highway dispersion[J]. Road Traffic Management, 2021, 39 (4): 36- 37
|
|
|
| [12] |
陈志军, 胡军楠, 冷姚, 等 基于轻量化网络和注意力机制的智能车快速目标识别方法[J]. 交通运输系统工程与信息, 2022, 22 (6): 105- 113
CHEN Zhijun, HU Junnan, LENG Yao, et al Intelligent vehicle target fast recognition based on lightweight networks and attention mechanism[J]. Transport Systems Engineering and Information, 2022, 22 (6): 105- 113
|
|
|
| [2] |
项新建, 胡海斌, 姚佳娜, 等 一种基于物影匹配算法的道路小目标跟踪方法[J]. 交通运输系统工程与信息, 2022, 22 (6): 85- 94
XIANG Xinjian, HU Haibin, YAO Jiana, et al A road small target tracking approach based on object-shadow matching algorithm[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22 (6): 85- 94
|
|
|
| [13] |
王博, 刘昌赫, 张驰, 等 基于道路监控的高速公路作业区碰撞风险预警[J]. 浙江大学学报: 工学版, 2024, 58 (6): 1- 12
WANG Bo, LIU Changhe, ZHANG Chi, et al Crash risk early warning in highway work zone based on road surveillance camera[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (6): 1- 12
|
|
|
| [14] |
LIU W, ZHOU B, WANG Z, et al FPPNet: a fixed-perspective-perception module for small object detection based on background difference[J]. IEEE Sensors Journal, 2023, 23 (10): 11057- 11069
doi: 10.1109/JSEN.2023.3263539
|
|
|
| [15] |
刘小波, 肖肖, 王凌, 等 基于无锚框的目标检测方法及其在复杂场景下的应用进展[J]. 自动化学报, 2023, 49 (7): 1369- 1392
LIU Xiaobo, XIAO Xiao, WANG Ling, et al Anchor-free based target object detection methods and its application progress in complex scenes[J]. Acta Automatica Sinica, 2023, 49 (7): 1369- 1392
|
|
|
| [16] |
WANG H, LIU C, CAI Y, et al YOLOv8-QSD: an improved small object detection algorithm for autonomous vehicles based on YOLOv8[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 24 (73): 1- 16
|
|
|
| [17] |
WANG C Y, YEH I H, LIAO H Y M. Yolov9: learning what you want to learn using programmable gradient information [C]// European Conference on Computer Vision . Milan: [s. n.], 2024: 1−21.
|
|
|
| [18] |
SHI Y, LI S, LIU Z, et al MTP-YOLO: you only look once based maritime tiny person detector for emergency rescue[J]. Journal of Marine Science and Engineering, 2024, 12 (4): 669- 675
doi: 10.3390/jmse12040669
|
|
|
| [3] |
郭恩强, 符锌砂 基于特征相似性学习的抛洒物检测方法[J]. 华南理工大学学报: 自然科学版, 2023, 51 (6): 30- 41
|
|
|
| [19] |
李立, 平振东, 徐志刚, 等 高速公路行车风险路侧感知系统的设备优化布设[J]. 浙江大学学报: 工学版, 2023, 57 (6): 1137- 1146
LI Li, PING Zhendong, XU Zhigang, et al Devices’ optimal deployment of roadside sensing system for expressway driving risk[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (6): 1137- 1146
|
|
|
| [20] |
LI Y, HOU Q, ZHENG Z, et al. Large selective kernel network for remote sensing object detection. [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Paris: IEEE, 2023: 16794-16805.
|
|
|
| [21] |
WANG C, HE W, NIE Y, et al Gold-YOLO: efficient object detector via gather-and-distribute mechanism[J]. Advances in Neural Information Processing Systems, 2024, 24 (36): 1- 19
|
|
|
| [22] |
CHEN W, LUO J, ZHANG F, et al A review of object detection: datasets, performance evaluation, architecture, applications and current trends[J]. Multimedia Tools and Applications, 2024, 24 (83): 1- 59
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|