|
|
|
| UAV small target detection algorithm based on improved YOLOv5s |
Yaolian SONG( ),Can WANG,Dayan LI*(),Xinyi LIU ),Can WANG,Dayan LI*(),Xinyi LIU |
| Faculty of Information Engineering and Automation, Kunming University of Science and Technology, Kunming 650500, China |
|
|
|
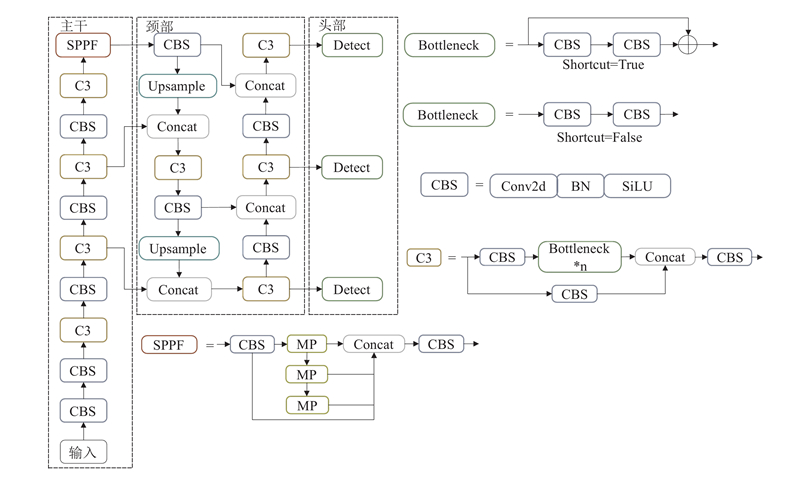
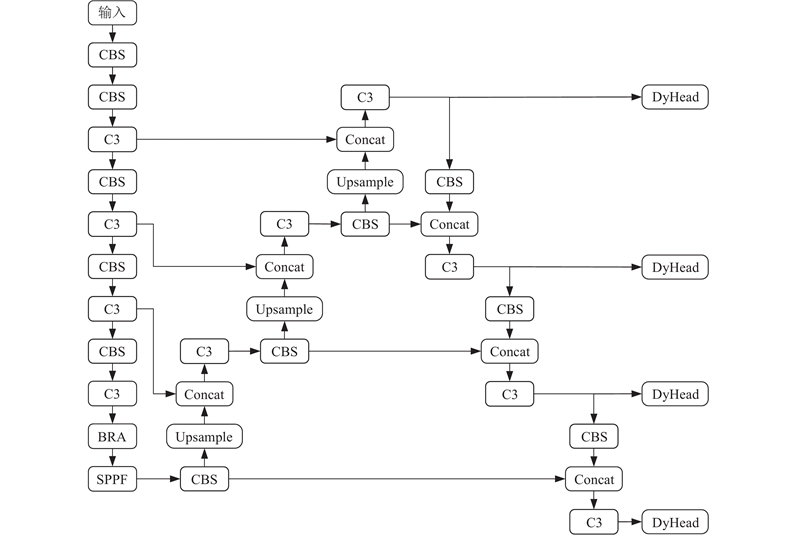
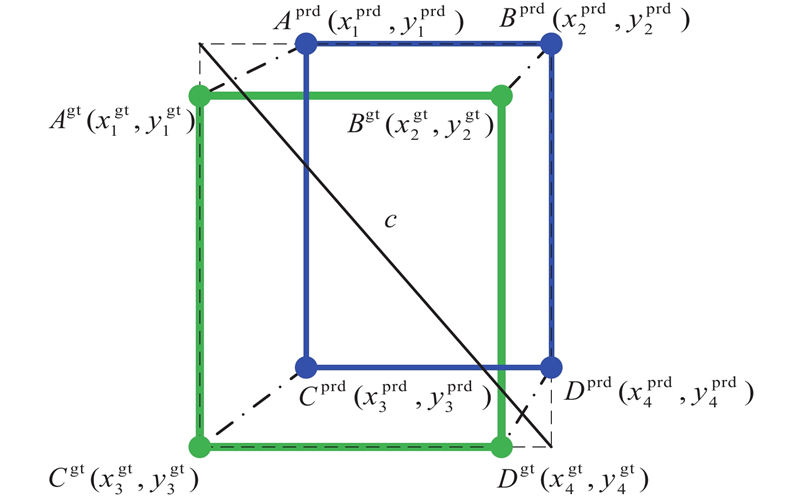
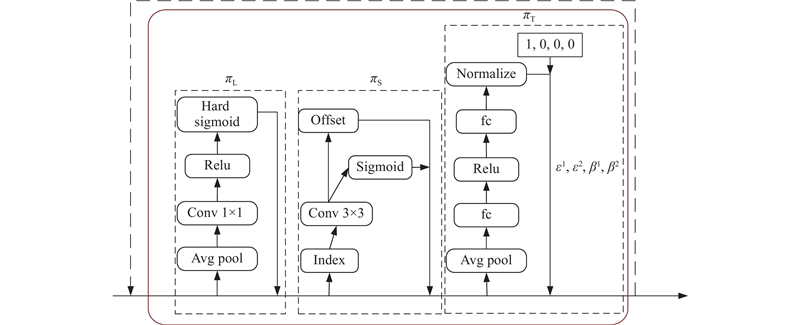
Abstract An unmanned aerial vehicle (UAV) small target detection algorithm based on YOLOv5, termed FDB-YOLO, was proposed to address the significant issue of misidentification and omissions in traditional target detection algorithms when applied to UAV aerial photography of small targets. Initially, a small target detection layer was added on the basis of YOLOv5, and the feature fusion network was optimized to fully leverage the fine-grained information of small targets in shallow layers, thereby enhancing the network’s perceptual capabilities. Subsequently, a novel loss function, FPIoU, was introduced, which capitalized on the geometric properties of anchor boxes and utilized a four-point positional bias constraint function to optimize the anchor box positioning and accelerate the convergence speed of the loss function. Furthermore, a dynamic target detection head (DyHead) incorporating attention mechanism was employed to enhance the algorithm’s detection capabilities through increased awareness of scale, space, and task. Finally, a bi-level routing attention mechanism (BRA) was integrated into the feature extraction phase, selectively computing relevant areas to filter out irrelevant regions, thereby improving the model’s detection accuracy. Experimental validation conducted on the VisDrone2019 dataset demonstrated that the proposed algorithm outperformed the YOLOv5s baseline in terms of Precision by an increase of 3.7 percentage points, Recall by an increase of 5.1 percentage points, mAP50 by an increase of 5.8 percentage points, and mAP50:95 by an increase of 3.4 percentage points, showcasing superior performance compared to current mainstream algorithms.
|
|
Received: 09 January 2024
Published: 25 November 2024
|
|
|
| Fund: 国家自然科学基金资助项目(61962032); 云南省优秀青年基金资助项目(202001AW070003); 云南省基础研究计划面上资助项目(202301AT070452). |
|
Corresponding Authors:
Dayan LI
E-mail: 39217149@qq.com;lidayan@kust.edu.cn
|
基于改进YOLOv5s的无人机小目标检测算法
为了解决传统目标检测算法对无人机(UAV)航拍小目标存在错漏检严重的问题,提出基于YOLOv5的无人机小目标检测算法FDB-YOLO. 在YOLOv5的基础上增加小目标检测层,优化特征融合网络,充分利用网络浅层小目标细粒信息,提升网络感知能力;提出损失函数FPIoU,通过充分利用锚框的几何性质,采用四点位置偏置约束函数,优化锚框定位,加快损失函数收敛速度;采用结合注意力机制的动态目标检测头(DyHead),通过增加尺度、空间、任务感知提升算法检测能力;在特征提取部分引入双级路由注意力机制(BRA),通过有选择性地对相关区域进行计算,过滤无关区域,提升模型的检测精确度. 实验证明,在VisDrone2019数据集上,本算法与YOLOv5s目标检测算法相比,精确率提升了3.7个百分点,召回率提升了5.1个百分点,mAP50增加了5.8个百分点,mAP50∶95增加3.4个百分点,并且相比当前主流算法而言都有更加优秀的表现.
关键词:
无人机视角,
小目标检测层,
损失函数,
注意力机制,
YOLOv5
|
|
| [1] |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Columbus: IEEE, 2014: 580–587.
|
|
|
| [2] |
REN S , HE K , GIRSHICK R , et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2017, 39(6): 1137–1149.
|
|
|
| [3] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 779–788.
|
|
|
| [4] |
LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the IEEE International Conference on Computer Vision . Venice: IEEE, 2017: 2999–3007.
|
|
|
| [5] |
ZHU X, LYU S, WANG X, et al. TPH-YOLOv5: improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 2778–2788.
|
|
|
| [6] |
胡俊, 顾晶晶, 王秋红 基于遥感图像的多模态小目标检测[J]. 图学学报, 2022, 43 (2): 197- 204
HU Jun, GU Jingjing, WANG Qiuhong Multimodal small target detection based on remote sensing image[J]. Journal of Graphics, 2022, 43 (2): 197- 204
|
|
|
| [7] |
韩俊, 袁小平, 王准, 等 基于YOLOv5s的无人机密集小目标检测算法[J]. 浙江大学学报: 工学版, 2023, 57 (6): 1224- 1233
HAN Jun, YUAN Xiaoping, WANG Zhun, et al UAV dense small target detection algorithm based on YOLOv5s[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (6): 1224- 1233
|
|
|
| [8] |
DAI X, CHEN Y, XIAO B, et al. Dynamic head: unifying object detection heads with attentions [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 7369–7378.
|
|
|
| [9] |
ZHU L, WANG X, KE Z, et al. BiFormer: vision transformer with bi-level routing attention [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Vancouver: IEEE, 2023: 10323–10333.
|
|
|
| [10] |
REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 6517–6525.
|
|
|
| [11] |
REDMON J, FARHADI A. Yolov3: an incremental improvement [EB/OL]. (2018-04-08)[2023-11-20]. https://arxiv.org/abs/1804.02767.
|
|
|
| [12] |
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. Yolov4: optimal speed and accuracy of object detection [EB/OL]. (2020-04-23)[2023-11-20]. https://arxiv.org/abs/2004.10934.
|
|
|
| [13] |
LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 936–944.
|
|
|
| [14] |
LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 8759–8768.
|
|
|
| [15] |
ZHENG Z, WANG P, REN D, et al Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2021, 52 (8): 8574- 8586
|
|
|
| [16] |
WOO S, PARK J, LEE J Y, et al. Cbam: convolutional block attention module [C]// Proceedings of the European Conference on Computer Vision . Munich: Springer, 2018: 3–19.
|
|
|
| [17] |
HU J, SHEN L, SUN G. Squeeze-and-excitation networks [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 7132–7141.
|
|
|
| [18] |
HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 13708–13717.
|
|
|
| [19] |
WANG Q, WU B, ZHU P, et al. ECA-Net: efficient channel attention for deep convolutional neural networks [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 11531–11539.
|
|
|
| [20] |
DU D, ZHU P, WEN L, et al. VisDrone-DET2019: the vision meets drone object detection in image challenge results [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops . Seoul: IEEE, 2019: 213–226.
|
|
|
| [21] |
LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications [EB/OL]. (2022-09-07)[2023-11-20]. https://arxiv.org/abs/2209.02976.
|
|
|
| [22] |
WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Vancouver: IEEE, 2023: 7464–7475.
|
|
|
| [23] |
REZATOFIGHI H, TSOI N, GWAK J Y, et al. Generalized intersection over union: a metric and a loss for bounding box regression [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 658–666.
|
|
|
| [24] |
ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression [C]// Proceedings of the AAAI Conference on Artificial Intelligence . New York: AAAI, 2020, 34(7): 12993–13000.
|
|
|
| [25] |
GEVORGYAN Z. SIoU loss: more powerful learning for bounding box regression [EB/OL]. (2022-05-25)[2023-11-20]. https://arxiv.org/abs/2205.12740.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|