|
|
|
| Empty-load charging strategy for autonomous vehicle parking based on multi-agent system |
Wenhao LI1,2( ),Yanjie JI1,*(),Hao WU3,Yewen JIA1,Shuichao ZHANG4 ),Yanjie JI1,*(),Hao WU3,Yewen JIA1,Shuichao ZHANG4 |
1. School of Transportation, Southeast University, Nanjing 211189, China
2. Department of Civil and Environmental Engineering, Nagoya University, Nagoya 464-8603, Japan
3. Key Laboratory of Traffic Information and Safety, Anhui Sanlian University, Hefei 230601, China
4. School of Civil and Transportation Engineering, Ningbo University of Technology, Ningbo 315211, China |
|
|
|
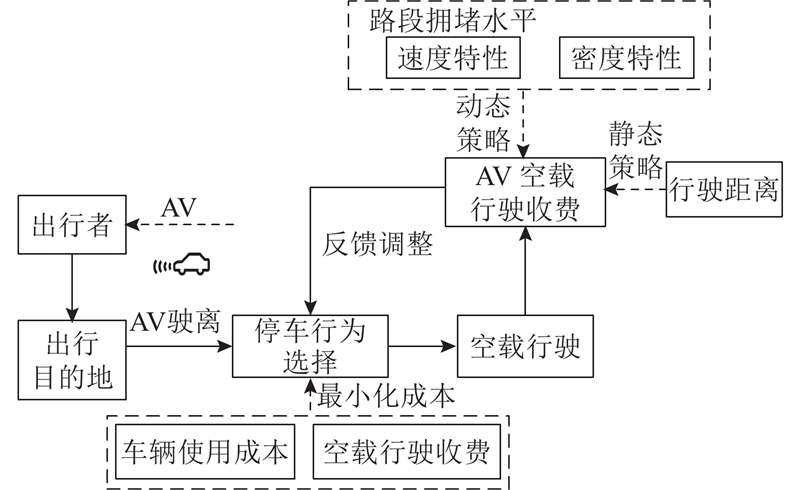
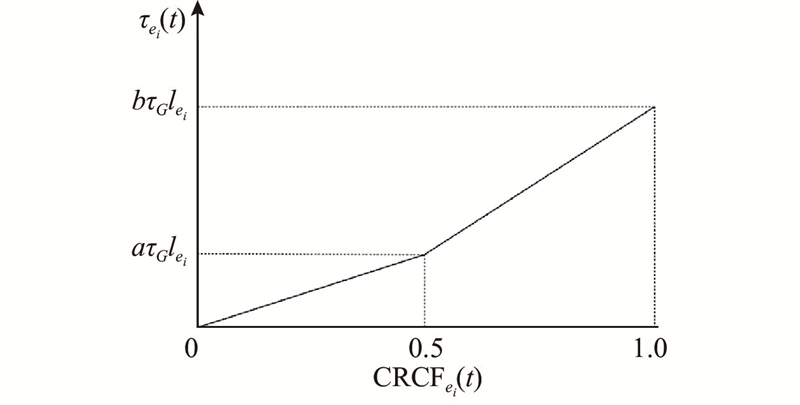
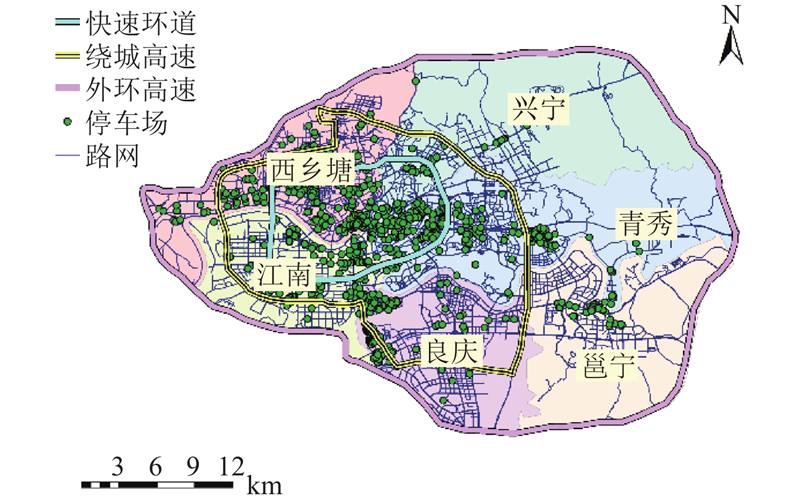
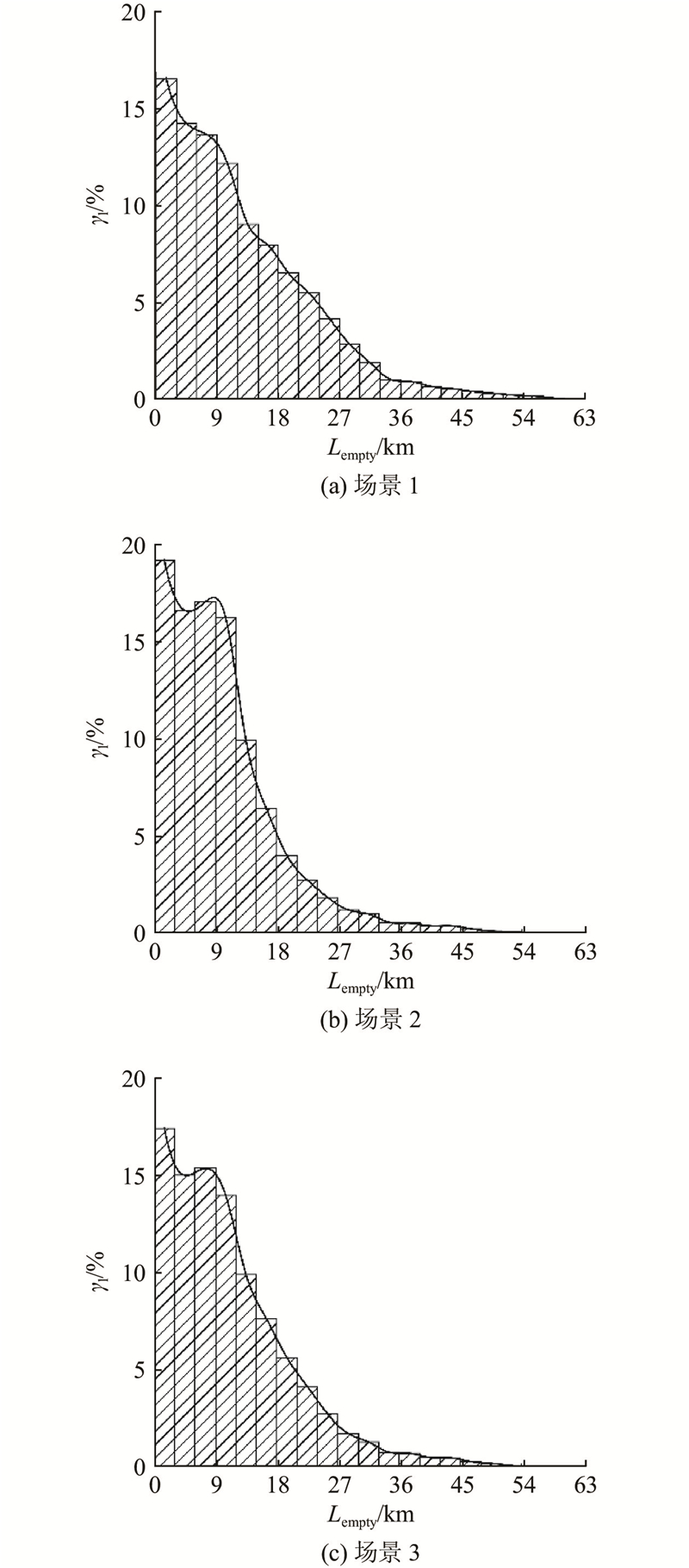
Abstract A multi-agent parking simulation framework was constructed in order to formulate autonomous vehicle (AV) parking demand management strategies. Two charging strategies for empty-load driving were proposed: a static charge based on driving distance and a dynamic charge based on road congestion levels. Rate calculation method was analyzed. Cost functions for parking lots, residential parking, and continuous empty cruising were established under these charging policies. A logit model was used to describe the choice behavior under different parking modes. The simulation of urban mobility (SUMO) was used to conduct a large-scale road network simulation experiment in Nanning’s main urban area. AV parking behavior and road network operation under both strategies were analyzed. The simulation results showed that the empty-load driving mileage of AVs decreased by 20.16% and 10.85% under the static and dynamic charging strategies, respectively. Total vehicle delay decreased by 39.80% and 43.52%, respectively. The dynamic charging strategy was adjustable in real-time based on road conditions, and operational efficiency of the road network was significantly enhanced.
|
|
Received: 21 September 2023
Published: 23 July 2024
|
|
|
| Fund: 中央高校基本科研业务费专项资金资助项目(2242020K40063);江苏省研究生科研与实践创新计划资助项目(KYCX20_0137);浙江省自然科学基金资助项目(LTGG23E080005). |
|
Corresponding Authors:
Yanjie JI
E-mail: liwenhao@seu.edu.cn;jiyanjie@seu.edu.cn
|
基于多智体的自动驾驶汽车停车空载收费策略
为了制订自动驾驶车辆(AV)停车需求管理方案,搭建多智能体停车模拟框架,提出2种空载行驶收费策略:基于行驶距离的静态收费和基于道路拥堵水平的动态收费,研究费率计算方法. 建立空载行驶收费策略下停车场停车、居住地停车及持续空载巡航3种停车模式的成本函数,使用logit模型描述不同停车模式下的选择行为. 利用Simulation of urban mobility (SUMO),以南宁市主城区为例开展大规模路网下的仿真实验,研究2种策略下的AV停车行为及路网运行状态变化. 仿真结果表明,静态收费策略和动态收费策略下的AV空载行驶里程分别减少了20.16%和10.85%,车辆总延误分别降低了39.80%和43.52%;动态收费策略能够灵活地根据路况变化进行实时调整,路网运行效率提升更显著.
关键词:
停车空载收费,
自动驾驶汽车,
多智能体模拟,
SUMO
|
|
| [1] |
何胜学 自动代客泊车背景下的共享停车供需匹配模型及对应禁忌搜索算法[J]. 计算机应用研究, 2021, 38 (9): 2721- 2725
HE Shengxue Shared parking supply-demand matching model and designed tabu search algorithm based on autonomous valet parking[J]. Application Research of Computers, 2021, 38 (9): 2721- 2725
|
|
|
| [2] |
SHIN H, KIM M J, BAEK S, et al Perpendicular parking path generation and optimal path tracking algorithm for auto-parking of trailers[J]. International Journal of Control, Automation and Systems, 2022, 20 (9): 3006- 3018
|
|
|
| [3] |
RADVAND T, BAHRAMI S, YIN Y, et al Curbing cruising-as-substitution-for-parking in automated mobility[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103853
|
|
|
| [4] |
廉天翔. 面向自动驾驶汽车发展不同阶段的城市共享停车运营优化管理[D]. 北京: 北京交通大学, 2023.
LIAN Tianxiang. Optimized management of urban shared parking operations for different stages of self-driving vehicle development [D]. Beijing: Beijing Jiaotong University, 2023.
|
|
|
| [5] |
CHAI H, RODIER C J, SONG J W, et al The impacts of automated vehicles on center city parking[J]. Transportation Research Part A: Policy and Practice, 2023, 175: 103764
|
|
|
| [6] |
YAQOOB I, KHAN L U, KAZMI S M A, et al Autonomous driving cars in smart cities: recent advances, requirements, and challenges[J]. IEEE Network, 2019, 34 (1): 174- 181
|
|
|
| [7] |
KANG D, HU F, LEVIN M W Impact of automated vehicles on traffic assignment, mode split, and parking behavior[J]. Transportation Research Part D: Transport and Environment, 2022, 104: 103200
|
|
|
| [8] |
MILLARD-BALL A The autonomous vehicle parking problem[J]. Transport Policy, 2019, 75: 99- 108
|
|
|
| [9] |
CHILDRESS S, NICHOLS B, CHARLTON B, et al Using an activity-based model to explore the potential impacts of automated vehicles[J]. Transportation Research Record, 2015, 2493 (1): 99- 106
|
|
|
| [10] |
LEVIN M W, BOYLES S D Effects of autonomous vehicle ownership on trip, mode, and route choice[J]. Transportation Research Record, 2015, 2493 (1): 29- 38
|
|
|
| [11] |
HARPER C D, HENDRICKSON C T, SAMARAS C Exploring the economic, environmental, and travel implications of changes in parking choices due to driverless vehicles: an agent-based simulation approach[J]. Journal of Urban Planning and Development, 2018, 144 (4): 04018043
|
|
|
| [12] |
ZHANG X, LIU W, WALLER S T A network traffic assignment model for autonomous vehicles with parking choices[J]. Computer‐Aided Civil and Infrastructure Engineering, 2019, 34 (12): 1100- 1118
|
|
|
| [13] |
MONDAL A, JURI N R, BHAT C R, et al Accounting for ride-hailing and connected and autonomous vehicle empty trips in a four-step travel demand model[J]. Transportation research record, 2023, 2677 (3): 217- 228
|
|
|
| [14] |
WATANATADA T, DHARESHWAR A M, LIMA P R S R. Vehicle speeds and operating costs: models for road planning and management [R]. Washington, DC (USA): International Bank for Reconstruction and Development, 1987.
|
|
|
| [15] |
YAO E, WANG M, SONG Y, et al Estimating energy consumption on the basis of microscopic driving parameters for electric vehicles[J]. Transportation Research Record, 2014, 2454 (1): 84- 91
|
|
|
| [16] |
REZAEI M, NOORI H, RAZLIGHI M M, et al Refocus+: multi-layers real-time intelligent route guidance system with congestion detection and avoidance[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 22 (1): 50- 63
|
|
|
| [17] |
戴晶辰, 李瑞敏. 基于微观仿真的北京市拥堵收费研究[J]. 系统仿真学报, 2019, 31(11): 2458-2470.
DAI Jingchen, LI Ruimin. Microscopic simulation based evaluation of congestion pricing for Beijing urban area [J]. Journal of System Simulation , 2019, 31(11): 2458-2470.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|