|
|
|
| Modeling and simulation of passive lane-changing behavior of platoons in freeway work zone |
Junjie ZHANG( ),Yongfeng MA*(),Shuyan CHEN,Guanyang XING,Ziyu ZHANG ),Yongfeng MA*(),Shuyan CHEN,Guanyang XING,Ziyu ZHANG |
| College of Transportation, Jiangsu Key Laboratory of Urban ITS, Jiangsu Province Collaborative Innovation Center of Modern Urban Traffic Technologies, Southeast University, Nanjing 211189, China |
|
|
|
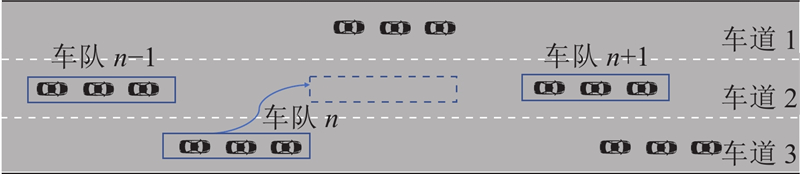
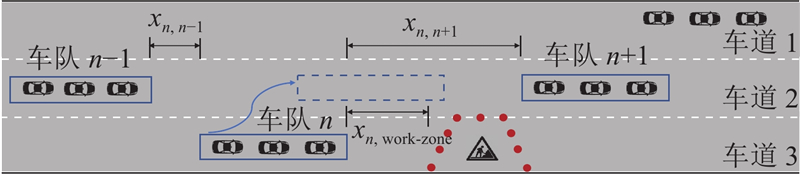
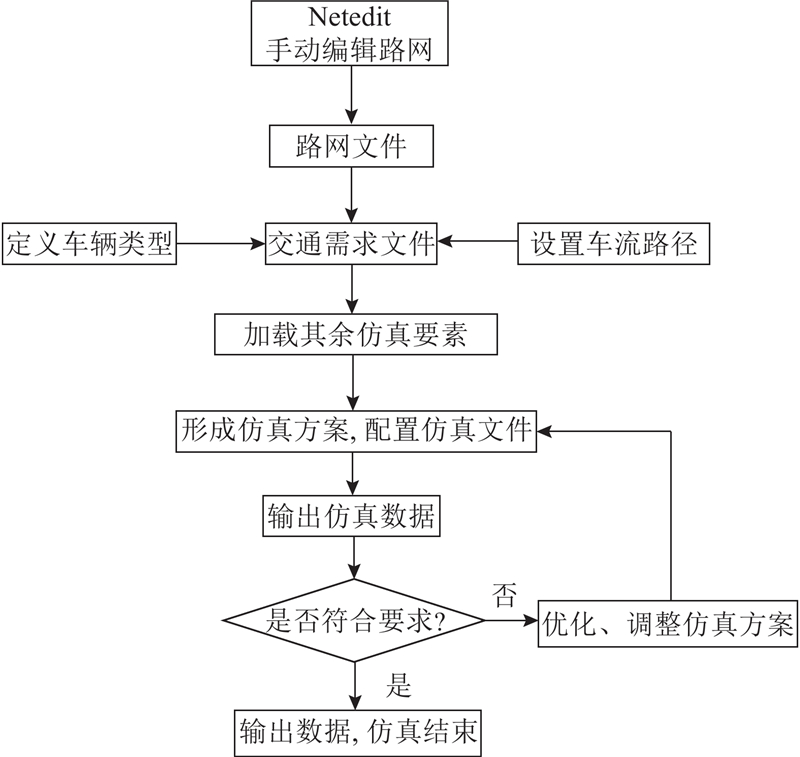
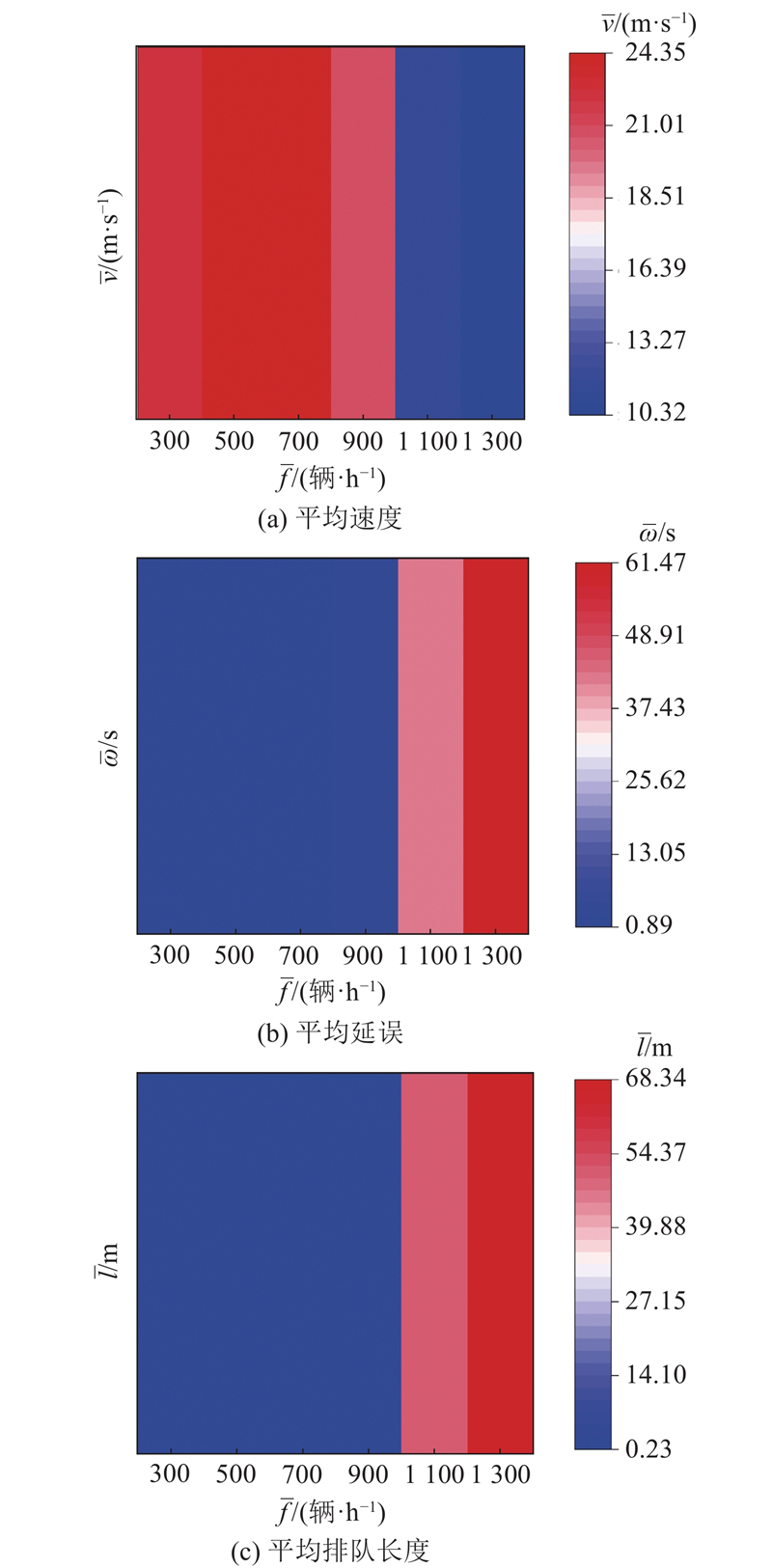
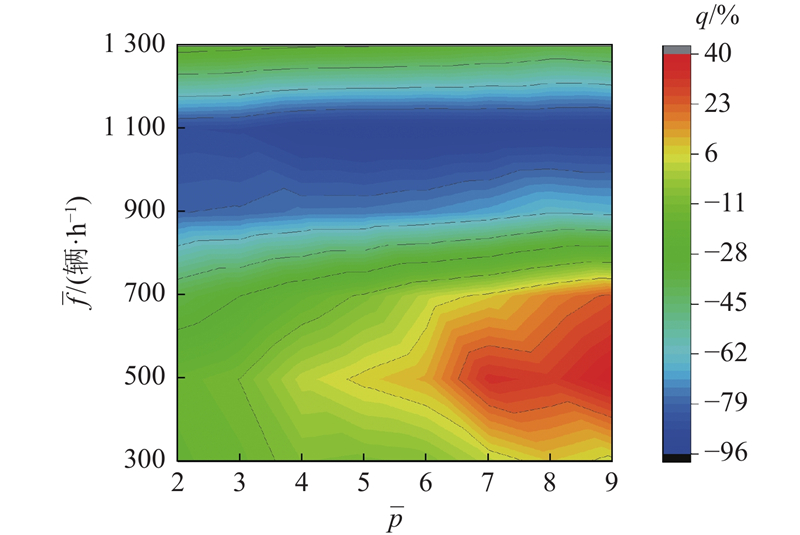
Abstract A passive lane-changing behavior model for connected vehicle platoons was developed from the perspective of cooperative optimization of platoon behavior aiming at the issue of significant speed fluctuations and low traffic efficiency in freeway work zones. The Plexe-SUMO simulation platform was employed, and algorithms for platoon generation and lane-changing choices were designed, thereby enabling the generation and simulation of platoon behavior. Different traffic flow conditions were considered, and the impact of platoon size adjustments on the enhancement of traffic efficiency in work zones was analyzed, culminating in the quest for an optimal platoon organization structure. The experimental results show that small platoons of less than 4 pcu are more suitable in medium and low-volume states (less than 900 pcu/h). Larger platoon sizes (greater than 6 pcu) improved passing efficiency as volume increases, especially in high-volume states. An ideal platoon size of 2 pcu was found when the single-lane volume was less than 1100 pcu/h in the experimental scenario, while a platoon size between 6 and 8 pcu was ideal for high volume states. There exists an optimal platoon size in work zones under different traffic flow conditions, allowing the roadway capacity to reach its maximum efficiency.
|
|
Received: 30 June 2023
Published: 23 January 2024
|
|
|
| Fund: 国家重点研发计划资助项目(2022YFB4300300) |
|
Corresponding Authors:
Yongfeng MA
E-mail: zhangjunjie@seu.edu.cn;mayf@seu.edu.cn
|
高速公路施工区车队被动换道行为建模与仿真
针对高速公路施工区域车速波动大,通行效率低的问题,从网联环境车队行为协同优化角度出发,构建车队被动换道行为模型. 利用Plexe-SUMO搭建仿真平台,设计相应车队生成及换道选择算法,实现车队行为的生成与仿真. 考虑不同的流量状态,通过调整车队规模,探究不同车队规模对施工区通行效率提升的影响,寻求较理想的车队组织形式. 结果表明,在中、低流量(小于900 辆/h)状态下,车辆以较小规模(小于4辆)的车队形式行驶较合适. 随着路段流量的增多,尤其在高流量状态下,车辆组成规模较大的车队(大于6辆)更能够提升通行效率. 在实验场景下,当单车道流量小于1 100 辆/h时,理想的车队规模为2辆. 当流量较大时,理想车队规模为6~8辆. 这表明在不同流量状态下的施工区域,存在某一合理车队规模,使得路段通行能力达到最优.
关键词:
车队,
高速公路,
施工区,
被动换道,
车队规模优化,
Plexe-SUMO
|
|
| [1] |
朱顺应, 邹禾, 蒋若曦, 等 高速公路施工区合流路段交通冲突模型[J]. 哈尔滨工业大学学报, 2020, 52 (9): 70- 76
LU Shunying, ZOU He, JIANG Ruoxi, et al Traffic conflict model for confluence section in highway construction area[J]. Journal of Harbin Institute of Technology, 2020, 52 (9): 70- 76
|
|
|
| [2] |
常鑫, 李海舰, 荣建, 等 混有智能网联车队的交通流基本图模型分析[J]. 东南大学学报: 自然科学版, 2020, 50 (4): 782- 788
CHANG Xin, LI Haijian, RONG Jian, et al Analysis on fundamental diagram model for mixed traffic flow with connected vehicle platoons[J]. Journal of Southeast University: Natural Science Edition, 2020, 50 (4): 782- 788
|
|
|
| [3] |
ZHU J, EASA S, GAO K Merging control strategies of connected and autonomous vehicles at freeway on-ramps: a comprehensive review[J]. Journal of Intelligent and Connected Vehicles, 2023, 2 (2): 99- 111
|
|
|
| [4] |
张毅, 裴华鑫, 姚丹亚 车路协同环境下车辆群体协同决策研究综述[J]. 交通运输工程学报, 2022, 22 (3): 1- 18
ZHANG Yi, PEI Huaxin, YAO Danya Research review on cooperative decision-making for vehicle swarms in vehicle infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22 (3): 1- 18
doi: 10.19818/j.cnki.1671-1637.2022.03.001
|
|
|
| [5] |
邱志军, 杨唐涛, 檀基稳, 等 网联环境下高速公路辅助驾驶车辆编队评估[J]. 中国公路学报, 2019, 32 (12): 66- 75
QIU Zhijun, YANG Tangtao, TAN Jiwen, et al Evaluation of assisted driving platooning on expressway in connected vehicle environment[J]. China Journal of Highway and Transport, 2019, 32 (12): 66- 75
doi: 10.19721/j.cnki.1001-7372.2019.12.007
|
|
|
| [6] |
JIANG Y, WANG S, YAO Z, et al A cellular automata model for mixed traffic flow considering the driving behavior of connected automated vehicle platoons[J]. Physica A: Statistical Mechanics and its Applications, 2021, 582: 126262
doi: 10.1016/j.physa.2021.126262
|
|
|
| [7] |
TIAN D, LU K, ZHENG K, et al. Modeling and simulation on cooperative movement of vehicle group based on the behavior of fish [M]//5G for Future Wireless Networks. New York: Springer, 2018: 630-639.
|
|
|
| [8] |
WANG P, WU X, HE X Modeling and analyzing cyberattack effects on connected automated vehicular platoons[J]. Transportation Research Part C: Emerging Technologies, 2020, 115 (4): 102625
|
|
|
| [9] |
LI M, LI Z, ZHOU Y, et al A cooperative energy efficient truck platoon lane-changing model preventing platoon decoupling in a mixed traffic environment[J]. Journal of Intelligent Transportation Systems: Technology, Planning and Operations, 2022, 27 (7): 1- 15
|
|
|
| [10] |
JIANG Y, SUN S, ZHU F, et al A mixed capacity analysis and lane management model considering platoon size and intensity of CAVs[J]. Physica A: Statistical Mechanics and its Applications, 2023, 615 (4): 128557
|
|
|
| [11] |
HAN X, XU R, XIA X, et al Strategic and tactical decision-making for cooperative vehicle platooning with organized behavior on multi-lane highways[J]. Transportation Research Part C: Emerging Technologies, 2022, 145 (10): 103952
|
|
|
| [12] |
LIU H, KAN X, SHLADOVER S, et al Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J]. Transportation Research Part C: Emerging Technologies, 2018, 95 (4): 261- 279
|
|
|
| [13] |
CAO D, WU J, WU J, et al A platoon regulation algorithm to improve the traffic performance of highway work zones[J]. Computer-Aided Civil and Infrastructure Engineering, 2021, 36 (7): 941- 956
doi: 10.1111/mice.12691
|
|
|
| [14] |
HAQUE M, RILETT L, ZHAO L Impact of platooning connected and automated heavy vehicles on interstate freeway work zone operations[J]. Journal of Transportation Engineering Part A: Systems, 2023, 149 (3): 1- 13
|
|
|
| [15] |
MAHBUB A, MALIKOPOULOS A. Platoon formation in a mixed traffic environment: a model-agnostic optimal control approach [C]//American Control Conference. Atlanta: IEEE, 2022: 4746–4751.
|
|
|
| [16] |
YAO Z, WU Y, WANG Y, et al Analysis of the impact of maximum platoon size of CAVs on mixed traffic flow: An analytical and simulation method[J]. Transportation Research Part C: Emerging Technologies, 2023, 147 (11): 103989
|
|
|
| [17] |
LI H, ZHANG J, SUN X, et al A survey of vehicle group behaviors simulation under a connected vehicle environment[J]. Physica A: Statistical Mechanics and its Applications, 2022, 603: 127816
doi: 10.1016/j.physa.2022.127816
|
|
|
| [18] |
GIPPS P G A behavioural car-following model for computer simulation[J]. Transportation Research Part B-Methodological, 1981, 15 (2): 105- 111
doi: 10.1016/0191-2615(81)90037-0
|
|
|
| [19] |
朱凯舟. 基于自动驾驶的道路平面交叉口复杂度模型及综合通行效益研究[D]. 扬州: 扬州大学, 2021.
ZHU Kaizhou. Research on complexity model and comprehensive traffic benefits of road intersection based on automatic vehicles [D]. Yangzhou: Yangzhou University, 2021.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|