| Civil and Transportation Engineering |
|


|
|
|
| Trajectory optimization of connected and autonomous vehicles to achieve tandem intersection control |
Man GUO( ),Zhen-yu MEI,Li-hui ZHANG*() ),Zhen-yu MEI,Li-hui ZHANG*() |
| College of Civil Engineering and Architecture, Zhejiang University, Hangzhou 310058, China |
|
|
|
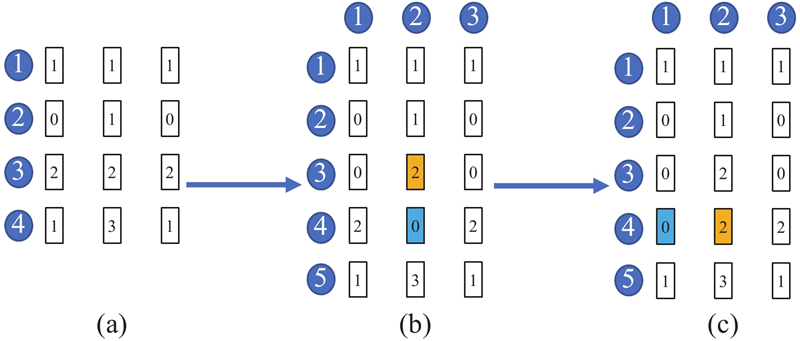
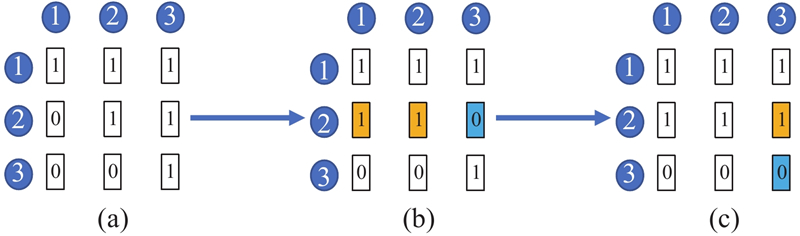
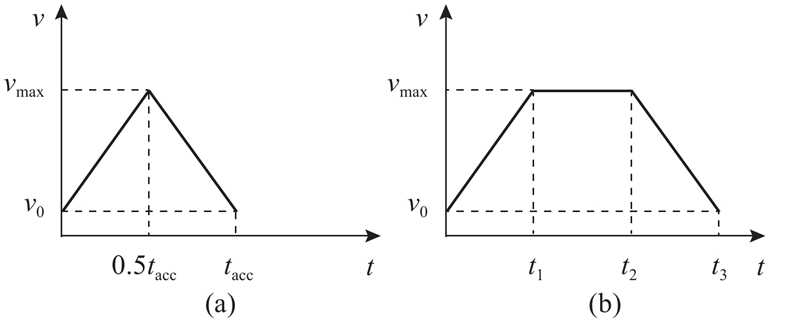
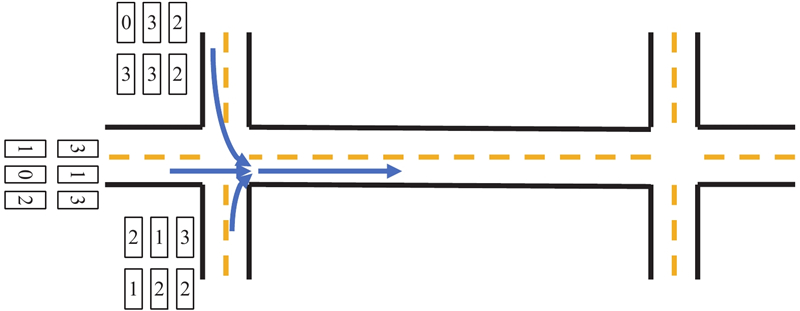
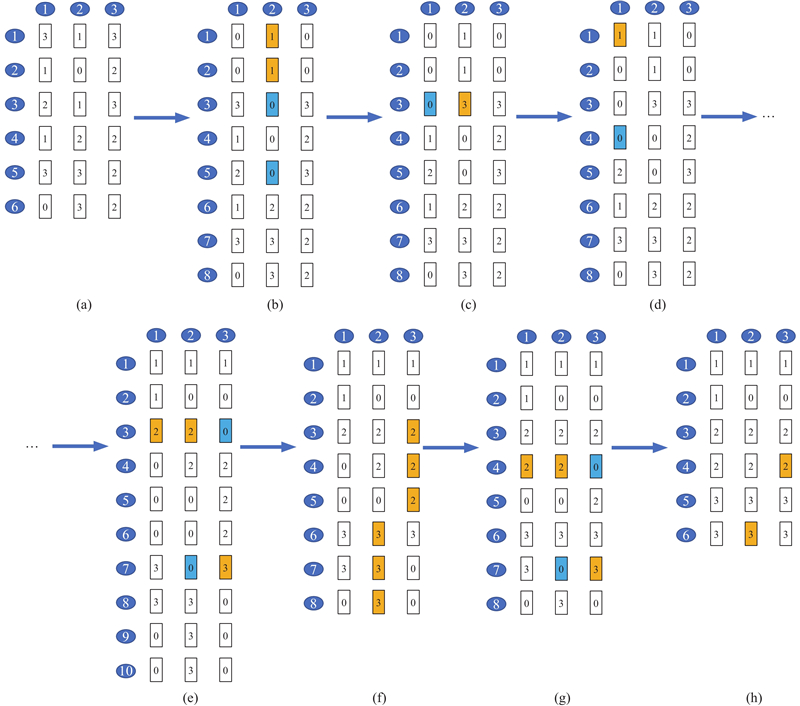
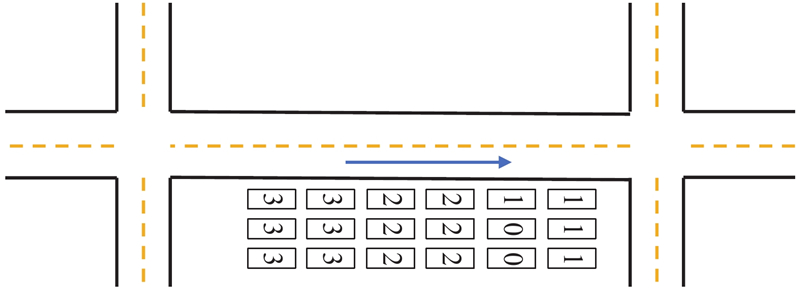
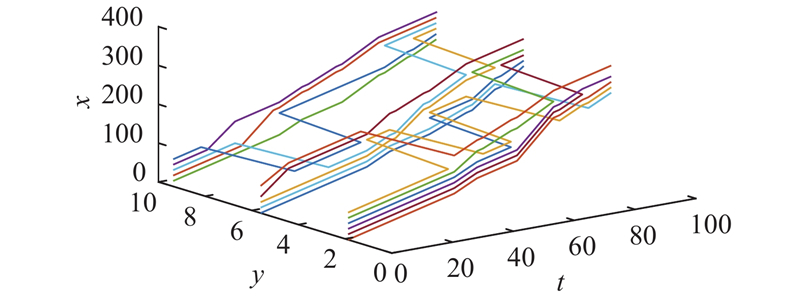
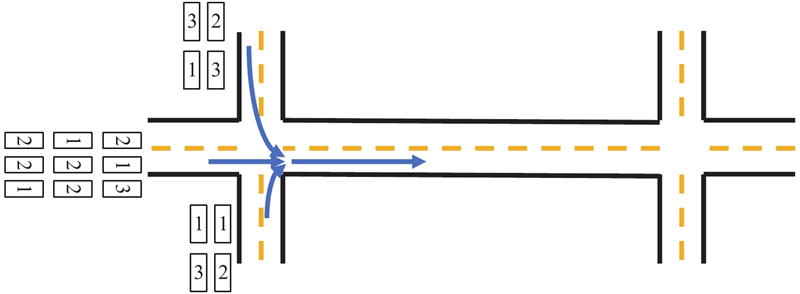
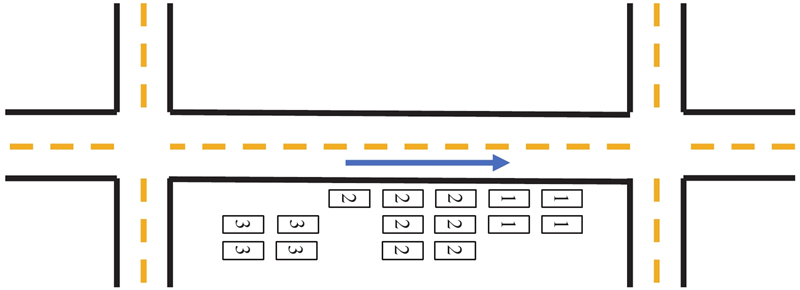
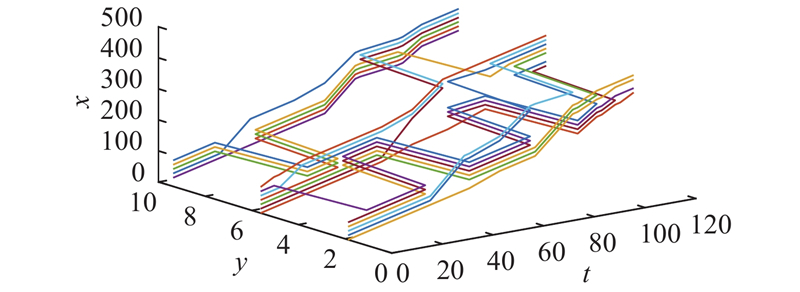
Abstract The trajectories of connected and autonomous vehicles (CAVs) were controlled to achieve the tandem arrangement of different turning movements in fully autonomous driving environment, in order to realize the tandem control of CAVs at signalized intersections to improve the flow efficiency. The trajectory control procedure mainly includes two modules. One is to separate CAVs with different turning directions along the driving direction, and the other is to distribute CAVs with the same turning directions evenly across all lanes. Given the distribution and turning information of upstream CAVs, the trajectories of CAVs can be exactly generated as follows. The evolution process of CAV relative locations in the traffic flow is determined according to a series of rules, until the CAVs with different turning directions form tandem arrangement. The time used during each step in the evolution process is calculated based on the vehicle dynamics models for both longitudinal and lateral movements. The entire trajectories for all CAVs from the very beginning that they enter the road to the end that they leave the road are then generated. Numerical examples show that tandem arrangement can be realized by controlling the trajectories of CAVs, and the trajectory computation procedure is efficient and can be applied in the real-time control of CAVs.
|
|
Received: 06 August 2019
Published: 10 March 2020
|
|
|
|
Corresponding Authors:
Li-hui ZHANG
E-mail: guoman@zju.edu.cn;lihuizhang@zju.edu.cn
|
自动车轨迹优化以实现分转向车流串联交叉口控制
在全自动驾驶环境中,采用控制网联自动车(CAVs)行驶轨迹的方法来完成分转向车流的串联排列,从而实现信号交叉口处车流的串联控制以提高通行效率. 自动车行驶轨迹控制过程主要包括:不同转向车流在纵向行驶方向上实现前后分离、同一转向车辆在所有车道上实现横向均匀分布. 给定上游来车分布及转向信息,自动车轨迹精确计算过程如下:通过一系列规则确定各自动车在交通流中的相对位置演变过程,直到分转向车流串联排列成型;基于车辆纵横向动力学模型,计算车辆相对位置演变过程中每一步所需时间;从初始状态开始整合形成每辆自动车的行驶轨迹. 算例表明,通过自动车的轨迹控制可以实现分转向车流的串联排列,且轨迹计算速度较快,可以用于车流实时控制.
关键词:
网联自动车,
信号控制交叉口,
车流串联控制,
轨迹控制,
启发式算法
|
|
| [1] |
DRESNER K, STONE P A Multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research, 2008, 31 (1): 591- 656
doi: 10.1613/jair.2502
|
|
|
| [2] |
HAUSKNECHT M, AU T C, STONE P. Autonomous intersection management: multi-intersection optimization [C]// International Conference on Intelligent Robots and Systems. San Francisco: IROS, 2011.
|
|
|
| [3] |
SUN W, ZHENG J, LIU H X. A capacity maximization scheme for intersection management with automated vehicles [C]// 22nd International Symposium on Transportation and Traffic Theory. Evanston: ISTTT, 2017: 121–136.
|
|
|
| [4] |
AU T, QUINLAN M, STONE P. Setpoint scheduling for autonomous vehicle controllers [C]// IEEE International Conference on Robotics and Automation. St Paul: ICRA, 2012.
|
|
|
| [5] |
ZHANG S, DENG W, ZHAO Q, et al. Dynamic trajectory planning for vehicle autonomous driving [C]// 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013: 4161–4162.
|
|
|
| [6] |
LUO Y, XIANG Y, CAO K, et al A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transportation Research Part C, 2016, 62: 87- 102
doi: 10.1016/j.trc.2015.11.011
|
|
|
| [7] |
LI B, ZHANG Y, FENG Y, et al Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3 (3): 340- 350
doi: 10.1109/TIV.2018.2843159
|
|
|
| [8] |
LU G, NIE Y, LIU X, et al Trajectory-based traffic management inside an autonomous vehicle zone[J]. Transportation Research Part B, 2019, 120: 76- 98
doi: 10.1016/j.trb.2018.12.012
|
|
|
| [9] |
LI Z, ELEFTERIADOU L, RANKA S Signal control optimization for automated vehicles at isolated signalized intersections[J]. Transportation Research Part C, 2014, 49: 1- 18
doi: 10.1016/j.trc.2014.10.001
|
|
|
| [10] |
LI P, ZHOU X Recasting and optimizing intersection automation as a connected-and-automated-vehicle (CAV) scheduling problem: a sequential branch-and-bound search approach in phase-time-traffic hypernetwork[J]. Transportation Research Part B, 2017, 105: 479- 506
doi: 10.1016/j.trb.2017.09.020
|
|
|
| [11] |
FENG Y, YU C, LIU H X Spatiotemporal intersection control in a connected and automated vehicle environment[J]. Transportation Research Part C, 2018, 89: 364- 383
doi: 10.1016/j.trc.2018.02.001
|
|
|
| [12] |
YU C, FENG Y, LIU H X, et al Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections[J]. Transportation Research Part B, 2018, 112: 89- 112
doi: 10.1016/j.trb.2018.04.007
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|