|
|
|
| Optimization of parking charge strategy based on dispatching autonomous vehicles |
Chi FENG1,2( ),Zhenyu MEI3,4,*() ),Zhenyu MEI3,4,*() |
1. College of Mechanical Engineering, Quzhou University, Quzhou 324000, China
2. Key Laboratory of Air-driven Equipment Technology of Zhejiang Province, Quzhou 324000, China
3. Institute of Intelligent Transportation, Zhejiang University, Hangzhou 310058, China
4. Balance Architecture Research Center, Zhejiang University, Hangzhou 310058, China |
|
|
|
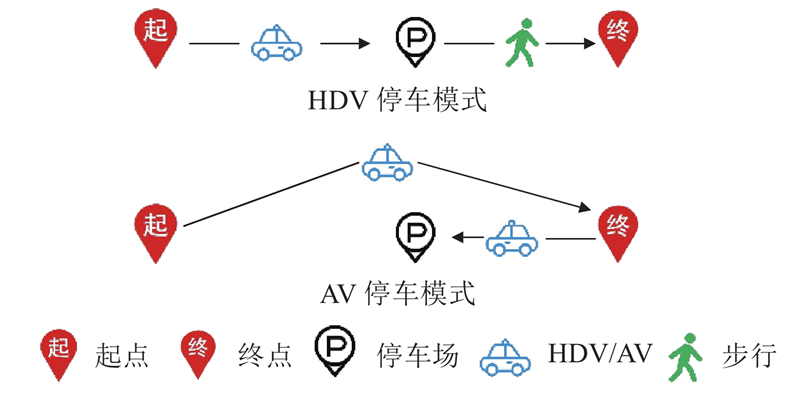
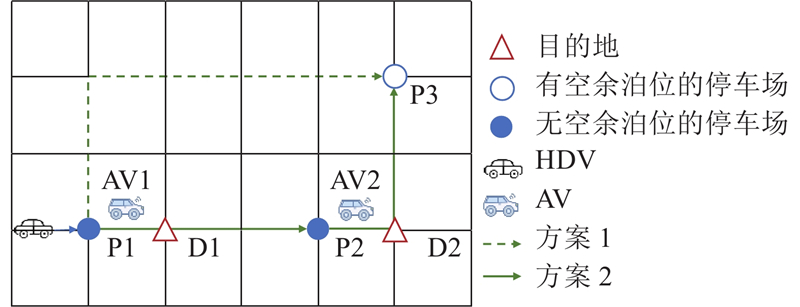
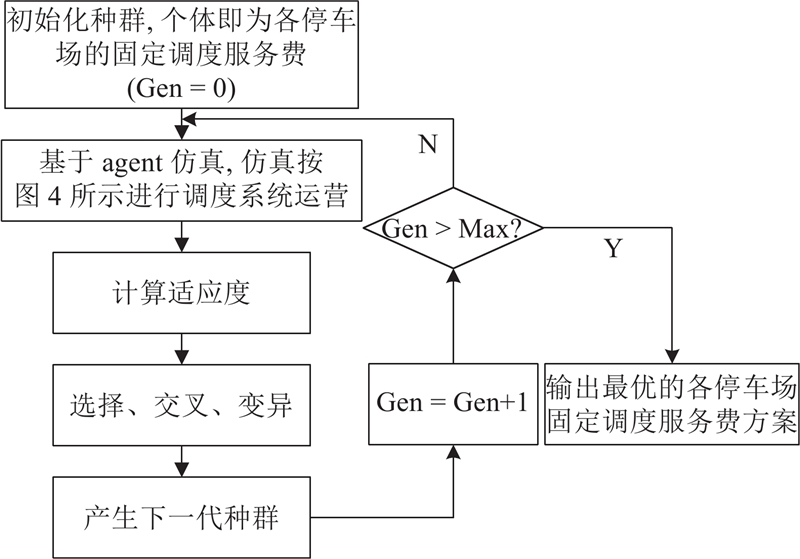
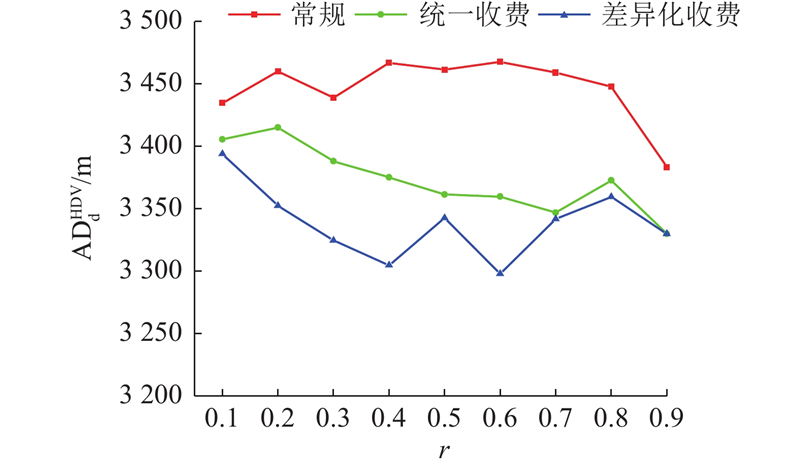
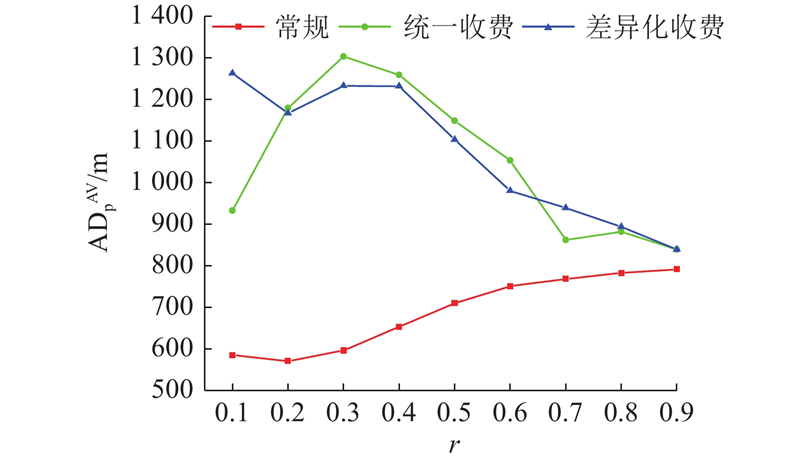
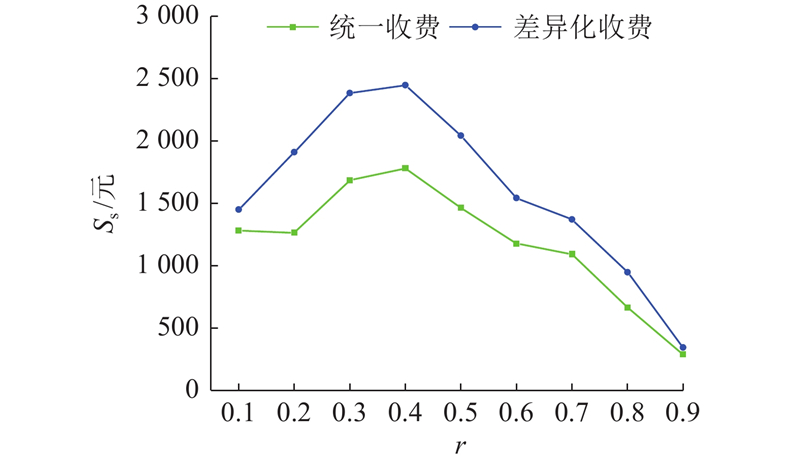
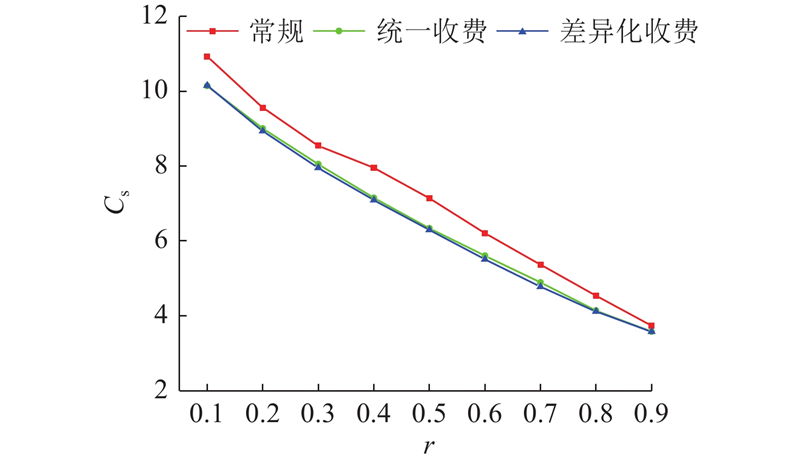
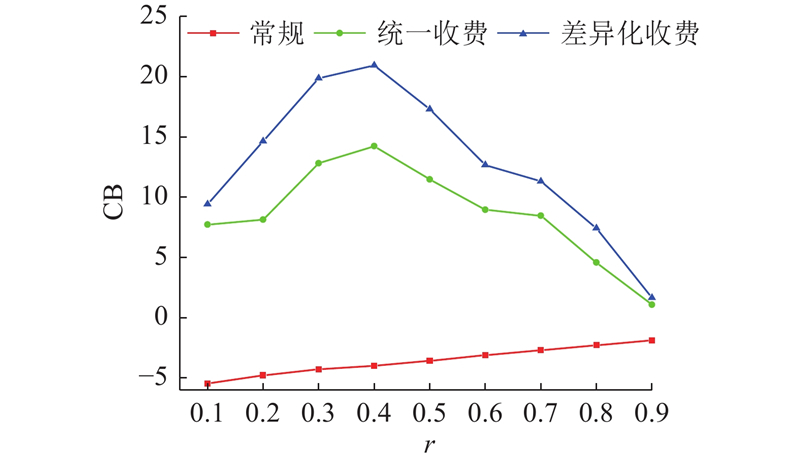
Abstract A parking charge strategy based on dispatching autonomous vehicles was proposed in order to improve the efficiency of the parking system that accommodates both human-driven vehicles and autonomous vehicles. This strategy provides autonomous vehicles dispatch service to the human-driven vehicle when there is no available parking space in the parking lot but there are autonomous vehicles. The parking system will dispatch a number of autonomous vehicles among multiple parking lots to create an available parking space for the human-driven vehicle in its target parking lot after charging a certain dispatch fee of the human-driven vehicle’s user. Since each parking lot’s dispatch fee can affect the human-driven vehicle users’ parking choices, and thus affect the operation efficiency of the parking system. An agent-based parking simulation model was constructed, and differentiated dispatch fee of every parking lot was set by the genetic algorithm. The simulation results show that the differentiated parking charge strategy based on dispatching the autonomous vehicles can significantly reduce the driving time, walking time, total travel time and mileage of the human-driven vehicle users, increase the revenue of the parking system, reduce the social cost and effectively alleviate the parking problem.
|
|
Received: 02 April 2023
Published: 07 November 2023
|
|
|
| Fund: 浙江省“领雁”研发攻关计划资助项目(2021C01G6233854,2022C01143);衢州学院科研启动经费资助项目(KYQD003223001) |
|
Corresponding Authors:
Zhenyu MEI
E-mail: fengchi@qzc.edu.cn;meizhenyu@zju.edu.cn
|
基于自动驾驶车辆调度的停车系统收费策略优化
针对有人驾驶车辆与自动驾驶车辆共存的停车系统,设计基于自动驾驶车辆调度的停车系统收费策略,以提升停车系统运行效率. 该策略在停车场无可用停车泊位但存在自动驾驶车辆时向有人驾驶车辆提供自动驾驶车辆调度服务,停车系统向有人驾驶车辆收取一定调度费用后,通过在多个停车场间调度若干自动驾驶车辆,为有人驾驶车辆在其目标停车场创造可用停车泊位. 各停车场的调度费用会影响有人驾驶车辆用户的停车选择,进而影响停车系统的运行效率,构建基于智能体的停车仿真模型,采用遗传算法差异化地设置系统内各个停车场的停车调度收费方案. 仿真结果显示,采用基于自动驾驶车辆调度的差异化收费策略,可以有效地减少有人驾驶车辆用户的行驶时间、步行时间、总出行时间及行驶里程,增加停车系统营收,降低社会成本,有效地缓解停车矛盾.
关键词:
停车调度,
停车收费,
自动驾驶车辆,
基于智能体模型,
停车策略
|
|
| [1] |
ZHANG W, WANG K Parking futures: shared automated vehicles and parking demand reduction trajectories in Atlanta[J]. Land Use Policy, 2020, 91: 103963
doi: 10.1016/j.landusepol.2019.04.024
|
|
|
| [2] |
BARONE R E, GIUFFRÈ T, SINISCALCHI S M, et al Architecture for parking management in smart cities[J]. IET Intelligent Transport Systems, 2014, 8 (5): 445- 452
doi: 10.1049/iet-its.2013.0045
|
|
|
| [3] |
FULMAN N, BENENSON I Approximation method for estimating search times for on-street parking[J]. Transportation Science, 2021, 55 (5): 1046- 1069
doi: 10.1287/trsc.2021.1067
|
|
|
| [4] |
ZAKHARENKO R Self-driving cars will change cities[J]. Regional Science and Urban Economics, 2016, 61: 26- 37
doi: 10.1016/j.regsciurbeco.2016.09.003
|
|
|
| [5] |
HARPER C D, HENDRICKSON C T, SAMARAS C Exploring the economic, environmental, and travel implications of changes in parking choices due to driverless vehicles: an agent-based simulation approach[J]. Journal of Urban Planning and Development, 2018, 144 (4): 04018043
doi: 10.1061/(ASCE)UP.1943-5444.0000488
|
|
|
| [6] |
ZHANG X, LIU W, WALLER S T A network traffic assignment model for autonomous vehicles with parking choices[J]. Computer-Aided Civil and Infrastructure Engineering, 2019, 34 (12): 1100- 1118
doi: 10.1111/mice.12486
|
|
|
| [7] |
LIU W An equilibrium analysis of commuter parking in the era of autonomous vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 191- 207
doi: 10.1016/j.trc.2018.04.024
|
|
|
| [8] |
WANG S, LEVIN M W, CAVERLY R J Optimal parking management of connected autonomous vehicles: a control-theoretic approach[J]. Transportation Research Part C: Emerging Technologies, 2021, 124: 102924
doi: 10.1016/j.trc.2020.102924
|
|
|
| [9] |
RADVAND T, BAHRAMI S, YIN Y, et al Curbing cruising-as-substitution-for-parking in automated mobility[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103853
doi: 10.1016/j.trc.2022.103853
|
|
|
| [10] |
BAHRAMI S, ROORDA M Autonomous vehicle parking policies: a case study of the City of Toronto[J]. Transportation Research Part A: Policy and Practice, 2022, 155: 283- 296
doi: 10.1016/j.tra.2021.11.003
|
|
|
| [11] |
MILLARD-BALL A The autonomous vehicle parking problem[J]. Transport Policy, 2019, 75: 99- 108
doi: 10.1016/j.tranpol.2019.01.003
|
|
|
| [12] |
YAN H, LI M, LIN X Time-dependent on-street parking planning in a connected and automated environment[J]. Transportation Research Part C: Emerging Technologies, 2022, 142: 103745
doi: 10.1016/j.trc.2022.103745
|
|
|
| [13] |
SAYARSHAD H Designing intelligent public parking locations for autonomous vehicles[J]. Expert Systems with Applications, 2023, 222: 119810
doi: 10.1016/j.eswa.2023.119810
|
|
|
| [14] |
XIE M, ZHANG X, WU Z, et al A shared parking optimization framework based on dynamic resource allocation and path planning[J]. Physica A: Statistical Mechanics and its Applications, 2023, 616: 128649
doi: 10.1016/j.physa.2023.128649
|
|
|
| [15] |
RAMEZANI M, NOURINEJAD M Dynamic modeling and control of taxi services in large-scale urban networks: a macroscopic approach[J]. Transportation Research Part C: Emerging Technologies, 2018, 94: 203- 219
doi: 10.1016/j.trc.2017.08.011
|
|
|
| [16] |
KHALID M, WANG K, ASLAM N, et al From smart parking towards autonomous valet parking: a survey, challenges and future works[J]. Journal of Network and Computer Applications, 2021, 175: 102935
doi: 10.1016/j.jnca.2020.102935
|
|
|
| [17] |
ZHAO C, LIAO F, LI X, et al Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103176
doi: 10.1016/j.trc.2021.103176
|
|
|
| [18] |
ZHAO C, CAO J, ZHANG X, et al From search-for-parking to dispatch-for-parking in an era of connected and automated vehicles: a macroscopic approach[J]. Journal of Transportation Engineering, Part A: Systems, 2022, 148 (2): 04021112
doi: 10.1061/JTEPBS.0000640
|
|
|
| [19] |
BANSAL P, KOCKELMAN K M Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A: Policy and Practice, 2017, 95: 49- 63
doi: 10.1016/j.tra.2016.10.013
|
|
|
| [20] |
SUN D J, NI X Y, ZHANG L H A discriminated release strategy for parking variable message sign display problem using agent-based simulation[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17 (1): 38- 47
doi: 10.1109/TITS.2015.2445929
|
|
|
| [21] |
CHIU Y C, ZHOU L, SONG H Development and calibration of the anisotropic mesoscopic simulation model for uninterrupted flow facilities[J]. Transportation Research Part B: Methodological, 2010, 44 (1): 152- 174
doi: 10.1016/j.trb.2009.06.001
|
|
|
| [22] |
NI X Y, SUN D J, PENG Z R An improved incremental assignment model for parking variable message sign location problem[J]. Journal of Advanced Transportation, 2015, 49 (7): 817- 828
doi: 10.1002/atr.1305
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|