|
|
|
| Optimization of spatial-temporal resources at intersections under environment of mixed traffic flow with connected and autonomous vehicles and human-driven vehicles |
Guo-min QIAN1( ),Jun-sheng FAN2,Chun-guang HE1,3,Li-hui ZHANG1,*(),Dian-hai WANG1 ),Jun-sheng FAN2,Chun-guang HE1,3,Li-hui ZHANG1,*(),Dian-hai WANG1 |
1. College of Civil Engineering and Architecture, Zhejiang University, Hangzhou 310058, China
2. Polytechnic Institute, Zhejiang University, Hangzhou 310015, China
3. School of Transportation and Logistics Engineering, Xinjiang Agricultural University, Urumqi 830052, China |
|
|
|
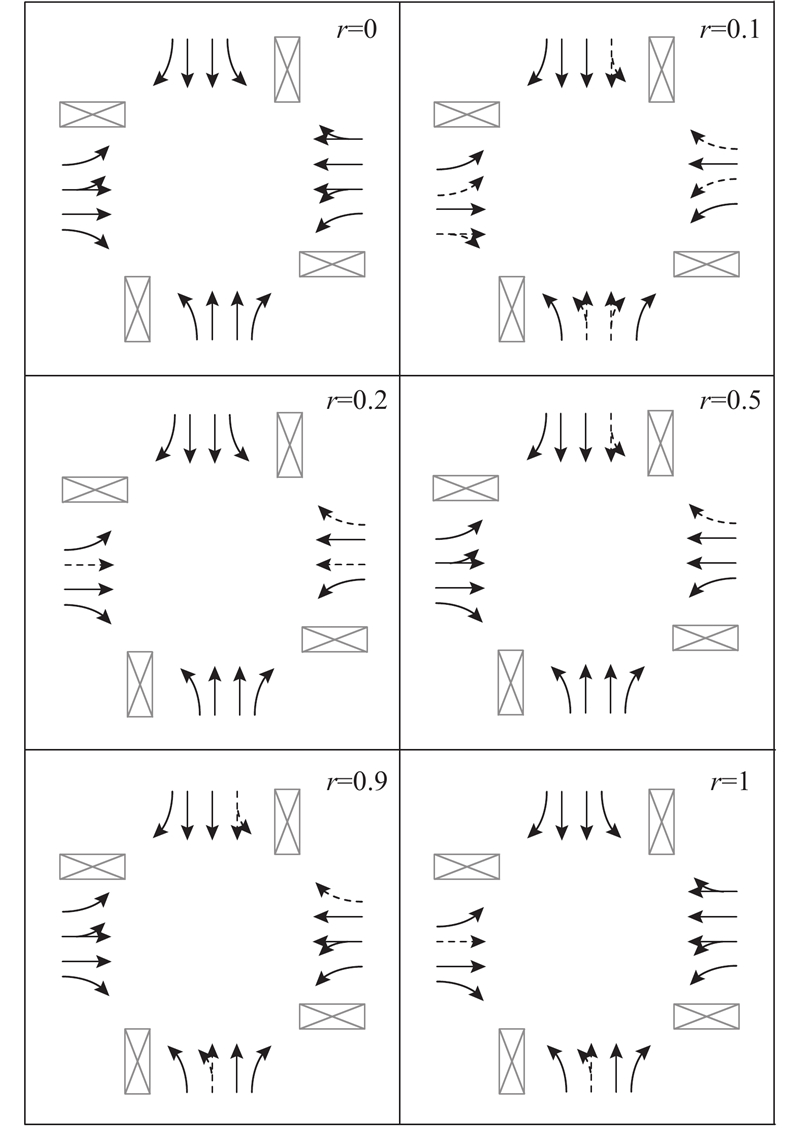
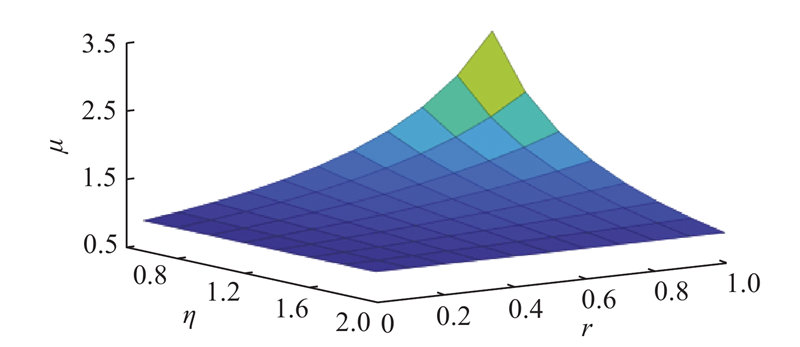
Abstract A mixed integer linear programming (MILP) model was proposed to optimize the spatial-temporal resources at intersections under the environment of mixed traffic flow with connected and autonomous vehicles (CAVs) and human-driven vehicles. The objective of the model is to maximize the intersection capacity, and the constraints mainly include those regarding lane channelization, flow distribution and signal timing settings. The lane channelization and signal timing scheme at intersections were optimized with different CAV driving behavior settings and different CAV penetration rates by taking a typical four-lane intersection as an example. Results show that the optimal channelization and signal timing scheme need to be adjusted with the change of CAV penetration rate and CAV car following behavior. The increase of the CAV penetration rate and the decrease of CAV headway are both beneficial to the improvement of the intersection capacity. The increase in the intersection capacity is slightly larger when the headway of CAV is not affected by the type of vehicles ahead.
|
|
Received: 10 January 2021
Published: 30 July 2021
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFB1600500) |
|
Corresponding Authors:
Li-hui ZHANG
E-mail: gmqian@zju.edu.cn;lihuizhang@zju.edu.cn
|
智能网联混行环境下交叉口时空资源配置优化
在网联自动车辆(CAVs)与人工驾驶车辆混行环境下,构建混合整数线性规划(MILP)模型,以优化交叉口时空资源配置. 该模型以交叉口通行能力最大化为目标,约束条件主要包括车道渠化、流量分配和信号配时等相关约束. 以典型四车道十字交叉口为例,在网联自动车不同驾驶行为和不同渗透比例的条件下,优化交叉口渠化方案和信号配时方案. 结果表明,随着网联自动车占比和跟驰行为的改变,交叉口最优渠化方案和信号配时方案须相应调整. 网联自动车占比增大和跟车时距减小,均有利于提高交叉口的通行能力,且当网联自动车跟车时距不受前车类型的影响时,交叉口通行能力提高更多.
关键词:
网联自动车,
混行车流,
交叉口通行能力,
车道渠化,
信号配时
|
|
| [1] |
DRESNER K, STONE P A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research, 2008, 31 (1): 591- 656
|
|
|
| [2] |
HAUSKNECHT M, AU T C, STONE P. Autonomous intersection management: multi-intersection optimization[C]// International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 4581-4586.
|
|
|
| [3] |
AU T C, SHAHIDI N, STONE P. Enforcing liveness in autonomous traffic management[C]// 25th AAAI Conference on Artificial Intelligence. San Francisco: AAAI, 2011: 1317-1322.
|
|
|
| [4] |
AU T, QUINLAN M, STONE P. Setpoint scheduling for autonomous vehicle controllers[C]// IEEE International Conference on Robotics and Automation. St Paul: IEEE, 2012: 2055-2060.
|
|
|
| [5] |
ZHANG S, DENG W, ZHAO Q, et al. Dynamic trajectory planning for vehicle autonomous driving[C]// 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013: 4161-4166.
|
|
|
| [6] |
LI X, GHIASI A, XU Z A piecewise trajectory optimization model for connected automated vehicles: exact optimization algorithm and queue propagation analysis[J]. Transportation Research Part B: Methodological, 2018, 118: 429- 456
doi: 10.1016/j.trb.2018.11.002
|
|
|
| [7] |
ZHOU F, LI X, MA J Parsimonious shooting heuristic for trajectory design of connected automated traffic part I: theoretical analysis with generalized time geography[J]. Transportation Research Part B: Methodological, 2017, 95: 394- 420
doi: 10.1016/j.trb.2016.05.007
|
|
|
| [8] |
MA J, LI X, ZHOU F, et al Parsimonious shooting heuristic for trajectory design of connected automated traffic part II: computational issues and optimization[J]. Transportation research, Part B: Methodological, 2017, 95: 421- 441
doi: 10.1016/j.trb.2016.06.010
|
|
|
| [9] |
LI Z, ELEFTERIADOU L, RANKA S Signal control optimization for automated vehicles at isolated signalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2014, 49: 1- 18
doi: 10.1016/j.trc.2014.10.001
|
|
|
| [10] |
ZHAO W, DONG N, SIMON S, et al A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalized intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802- 821
doi: 10.1016/j.trc.2018.05.025
|
|
|
| [11] |
YU C, FENG Y, LIU H X, et al Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections[J]. Transportation Research Part B: Methodological, 2018, 112: 89- 112
doi: 10.1016/j.trb.2018.04.007
|
|
|
| [12] |
KESTING A, TREIBER M, SCHOENHOF M, et al Adaptive cruise control design for active congestion avoidance[J]. Transportation Research Part C: Emerging Technologies, 2008, 16 (6): 668- 683
doi: 10.1016/j.trc.2007.12.004
|
|
|
| [13] |
LEVIN M W, BOYLES S D A multiclass cell transmission model for shared human and autonomous vehicle roads[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 103- 116
doi: 10.1016/j.trc.2015.10.005
|
|
|
| [14] |
LEVIN M W, BOYLES S D Effects of autonomous vehicle ownership on trip, mode, and route choice[J]. Transportation Research Record Journal of the Transportation Research Board, 2015, 2493 (1): 29- 38
doi: 10.3141/2493-04
|
|
|
| [15] |
LAZAR D, COOGAN S, PEDARSANI R. Capacity modeling and routing for traffic networks with mixed autonomy[C]//2017 IEEE 56th Annual Conference on Decision and Control. Melbourne: IEEE, 2017: 5678-5683.
|
|
|
| [16] |
YE L, YAMAMOTO T Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2018, 490: 269- 277
doi: 10.1016/j.physa.2017.08.015
|
|
|
| [17] |
GHIASI A, HUSSAIN O, QIAN Z, et al A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method[J]. Transportation Research Part B: Methodological, 2017, 106: 266- 292
doi: 10.1016/j.trb.2017.09.022
|
|
|
| [18] |
晏松. 智能网联环境下复杂交叉口信号控制研究[D]. 北京: 中国人民公安大学, 2019.
YAN Song. Signal control of complex intersection in intelligent network environment[D]. Beijing: People's Public Security University of China, 2019.
|
|
|
| [19] |
WONG C, WONG S Lane-based optimization of signal timings for isolated junctions[J]. Transportation Research Part B: Methodological, 2003, 37 (1): 63- 84
doi: 10.1016/S0191-2615(01)00045-5
|
|
|
| [20] |
WONG C, HEYDECKER B Optimal allocation of turns to lanes at an isolated signal-controlled junction[J]. Transportation Research Part B: Methodological, 2011, 45 (4): 667- 681
doi: 10.1016/j.trb.2010.12.001
|
|
|
| [21] |
MA W, LIU Y, HEAD L, et al Integrated optimization of lane markings and timings for signalized roundabouts[J]. Transportation Research Part C: Emerging Technologies, 2013, 36: 307- 323
doi: 10.1016/j.trc.2013.08.013
|
|
|
| [22] |
XIE S, JIANG H Increasing the capacity of signalized intersections by allocating exit lanes to turning movements[J]. Journal of Advanced Transportation, 2016, 50 (8): 2239- 2265
doi: 10.1002/atr.1457
|
|
|
| [23] |
ZHANG L, YANG H, WU D, et al Solving a discrete multimodal transportation network design problem[J]. Transportation Research Part C: Emerging Technologies, 2014, 49: 73- 86
doi: 10.1016/j.trc.2014.10.008
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|