| 机械工程 |
|


|
|
|
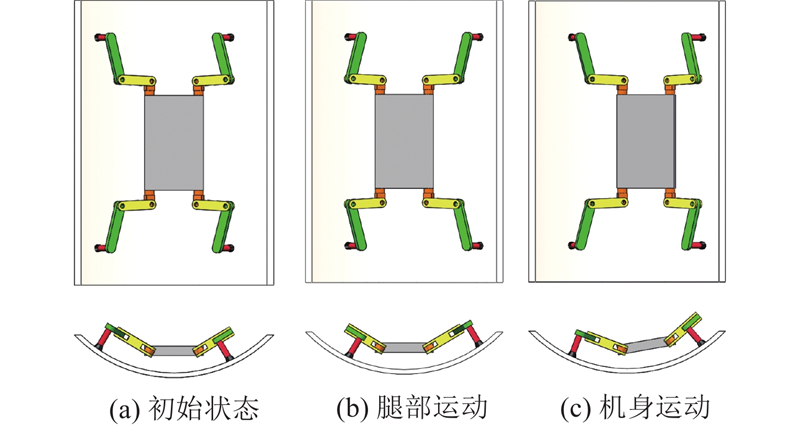
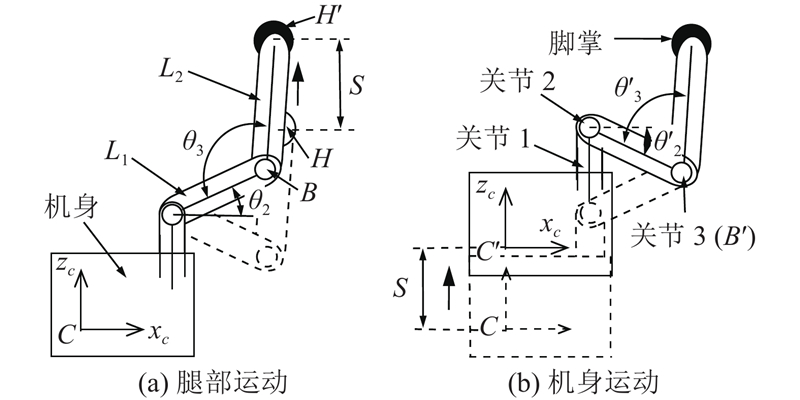
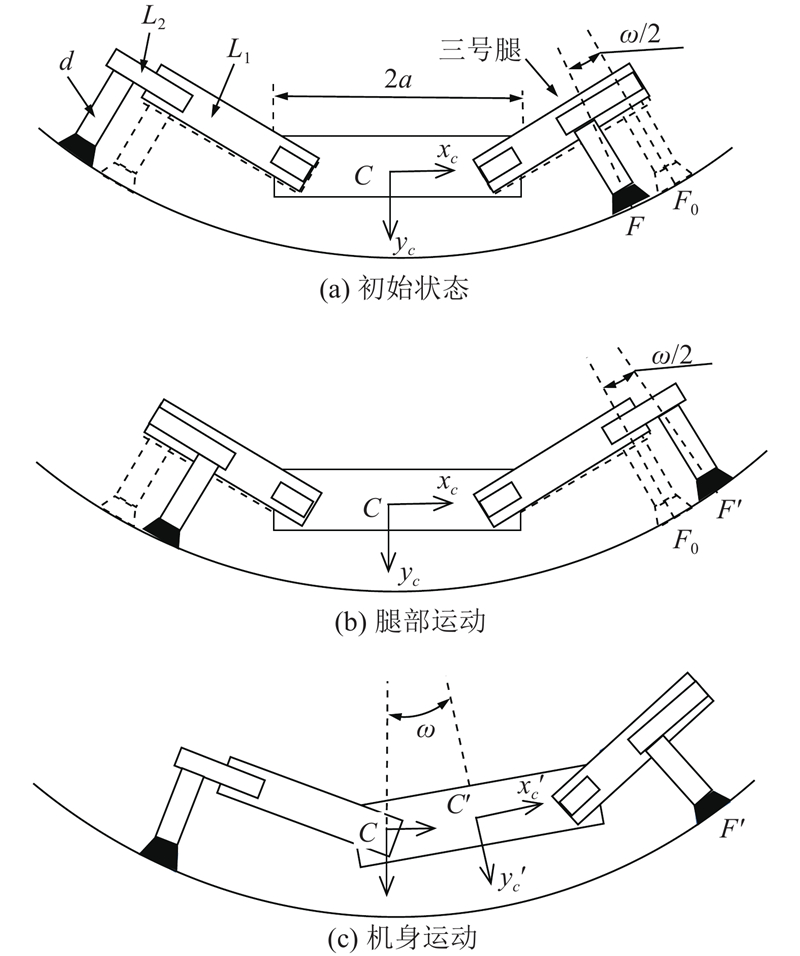
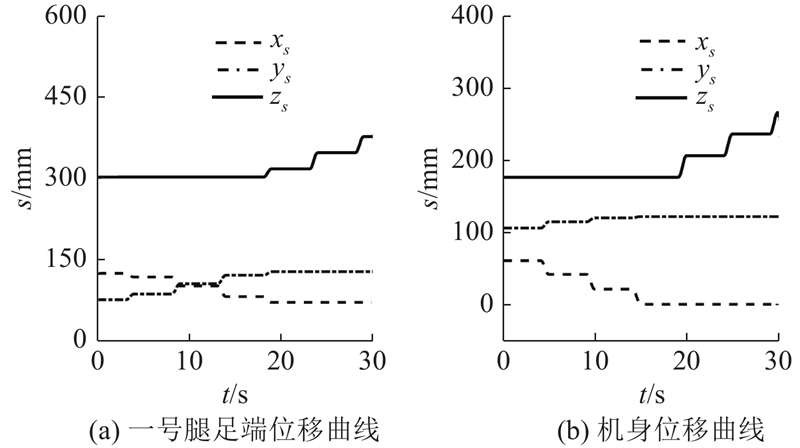
| 管道内壁四足爬壁机器人的运动学与步态规划 |
李琳1( ),薛泽浩1,蔡蒂2,张铁1,*() ),薛泽浩1,蔡蒂2,张铁1,*() |
1. 华南理工大学 机械与汽车工程学院,广东 广州 510641
2. 广州供电局有限公司,广东 广州 510620 |
|
| Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall |
| Lin LI1(),Ze-hao XUE1,Di CAI2,Tie ZHANG1,*() |
1. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China
2. Guangzhou Power Supply Bureau Limited Company, Guangzhou 510620, China |
引用本文:
李琳,薛泽浩,蔡蒂,张铁. 管道内壁四足爬壁机器人的运动学与步态规划[J]. 浙江大学学报(工学版), 2021, 55(12): 2286-2297.
Lin LI,Ze-hao XUE,Di CAI,Tie ZHANG. Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall. Journal of ZheJiang University (Engineering Science), 2021, 55(12): 2286-2297.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2021.12.008
或
https://www.zjujournals.com/eng/CN/Y2021/V55/I12/2286
|
| 1 |
LI Z , WANG Q Z , LI J , et al. A new approach to classification of devices and its application to classification of in-pipe robots [C]// IEEE Conference on Industrial Electronics and Applications. Hefei: IEEE, 2016: 1426-1431.
|
| 2 |
ROH S, CHOI H Differential-drive in-pipe robot for moving inside urban gas pipelines[J]. IEEE Transactions on Robotics, 2005, 21 (1): 1- 17
doi: 10.1109/TRO.2004.838000
|
| 3 |
RODRIGUE H, WANG W, HAN M W, et al An overview of shape memory alloy-coupled actuators and robots[J]. Soft Robotics, 2017, 4 (1): 3- 15
doi: 10.1089/soro.2016.0008
|
| 4 |
BHADORIYA A, GUPTA V K, MUKHERJEE S Development of in-pipe inspection robot[J]. Materials Today: Proceedings, 2018, 5 (9): 20769- 20776
doi: 10.1016/j.matpr.2018.06.406
|
| 5 |
PARK J, HYUN D, CHO W H, et al Normal-force control for an in-pipe robot according to the inclination of pipelines[J]. IEEE Transactions on Industrial Electronics, 2011, 58 (12): 5304- 5310
doi: 10.1109/TIE.2010.2095392
|
| 6 |
唐德威, 李庆凯, 梁涛, 等 三轴差动式管道机器人机械自适应驱动技术[J]. 机械工程学报, 2008, 44 (9): 128- 133
TANG De-wei, LI Qing-kai, LIANG Tao, et al Mechanical self-adaptive drive technology of triaxial differential pipe-robot[J]. Chinese Journal of Mechanical Engineering, 2008, 44 (9): 128- 133
doi: 10.3321/j.issn:0577-6686.2008.09.022
|
| 7 |
CISZEWSKI M, BURATOWSKI T, GIERGIEL M, et al Virtual prototyping, design and analysis of an in-pipe inspection mobile robot[J]. Journal of Theoretical and Applied Mechanics, 2014, 52 (2): 417- 429
|
| 8 |
BERNS K , ILG W , CORDES S , et al. Multi-joint robot for autonomous sewer inspection [C]// Proceedings 2000 ICRA. Millennium Conference. San Francisco: IEEE, 2002: 1701-1706.
|
| 9 |
李杰超, 曹力科, 肖晓晖 轮式磁吸附超声检测爬壁机器人的设计与吸附稳定性分析[J]. 中南大学学报:自然科学版, 2019, 50 (12): 2989- 2997
LI Jie-chao, CAO Li-ke, XIAO Xiao-hui Design and adsorption stability analysis of wall climbing robot based on wheeled magnetic adsorption for ultrasonic detection[J]. Journal of Central South University: Science and Technology, 2019, 50 (12): 2989- 2997
doi: 10.11817/j.issn.1672-7207.2019.12.008
|
| 10 |
宋伟, 姜红建, 王滔, 等 爬壁机器人磁吸附组件优化设计与试验研究[J]. 浙江大学学报:工学版, 2018, 52 (10): 1837- 1844
SONG Wei, JIANG Hong-jian, WANG Tao, et al Optimization design and experimental research on magnetic components for wall-climbing robot[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (10): 1837- 1844
doi: 10.3785/j.issn.1008-973X.2018.10.001
|
| 11 |
刘泉, 陈志华 具有良好壁面过渡能力的新型爬壁机器人动力学建模与分析[J]. 机床与液压, 2018, 46 (23): 1- 5
LIU Quan, CHEN Zhi-hua Dynamic modeling and analysis of new climbing robot with good wall transition capability[J]. Machine Tool and Hydraulics, 2018, 46 (23): 1- 5
doi: 10.3969/j.issn.1001-3881.2018.23.001
|
| 12 |
UNVER O, UNERI A, AYDEMIR A, et al. Geckobot: a gecko inspired climbing robot using elastomer adhesives [C]// Proceedings 2006 IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006: 2029-2335.
|
| 13 |
ZHANG L, MA S G, INOUE K, et al. Omni-directional walking of a quadruped robot with optimal body postures on a slope [C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 2976-2981.
|
| 14 |
BI Z M, ZHANG W J, CHEN I M, et al Automated geneartion of the D–H parameters for configuration design of modular manipulators[J]. Robotics and Computer-Integrated Manufacturing, 2007, 23 (5): 553- 562
doi: 10.1016/j.rcim.2006.02.014
|
| 15 |
GÜLHAN M M, ERBATUR K Kinematic arrangement optimization of a quadruped robot with genetic algorithms[J]. Measurement and Control, 2018, 51 (9/10): 406- 416
|
| 16 |
CHEN X D, WATANABE K, IZUMI K Kinematic solution of a quadruped walking robot-posture analysis of TITAN-VIII[J]. IFAC Proceedings Volumes, 1999, 32 (2): 827- 832
doi: 10.1016/S1474-6670(17)56140-6
|
| 17 |
KANG T, KIM H, SON T, et al. Design of quadruped walking and climbing robot [C]// Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2003: 619-624.
|
| 18 |
NAM W, SEO T W, KIM B, et al Kinematic analysis and experimental verification on the locomotion of gecko[J]. Journal of Bionic Engineering, 2009, 6 (3): 246- 254
doi: 10.1016/S1672-6529(08)60121-3
|
| 19 |
SHKOLNIK A, TEDRAKE R. Inverse kinematics for a point-foot quadruped robot with dynamic redundancy resolution [C]// Proceedings 2007 IEEE International Conference on Robotics and Automation. Roma: IEEE, 2007: 4331-4336.
|
| 20 |
CAMPA R, BERNAL J, SOTO I. Kinematic modeling and control of the hexapod parallel robot [C]// 2016 American Control Conference. Boston: IEEE, 2016: 1203-1208.
|
| 21 |
HOWARD D, ZHANG S J, SANGER D J Kinematic analysis of a walking machine[J]. Mathematics and Computers in Simulation, 1996, 41 (5/6): 525- 538
|
| 22 |
阮鹏, 俞志伟, 张昊, 等 基于ADAMS的仿壁虎机器人步态规划及仿真[J]. 机器人, 2010, 32 (4): 499- 504
RUAN Peng, YU Zhi-wei, ZHANG Hao, et al Gait planning and simulation of gecko inspired robot based on ADAMS[J]. ROBOT, 2010, 32 (4): 499- 504
doi: 10.3724/SP.J.1218.2010.00499
|
| 23 |
SON D H, JEON D S, NAM W C, DONGHOON, et al Gait planning based on kinematics for a quadruped gecko model with redundancy[J]. Robotics and Autonomous Systems, 2010, 58 (5): 648- 656
doi: 10.1016/j.robot.2009.11.009
|
| 24 |
GUAN Y, ZHU H, WU W, et al A modular biped wall-climbing robot with high mobility and manipulating function[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18 (6): 1787- 1798
doi: 10.1109/TMECH.2012.2213303
|
| 25 |
GHOSH S K Introduction to robotics: mechanics and control[J]. Journal of Materials Processing Technology, 1991, 25 (2): 239- 240
doi: 10.1016/0924-0136(91)90096-W
|
| 26 |
CHOI H B, KONNO A, UCHIYAMA M Closed-form forward kinematics solutions of a 4-DOF parallel robot[J]. International Journal of Control, Automation and Systems, 2009, 7 (5): 858- 864
doi: 10.1007/s12555-009-0520-1
|
| 27 |
ONANAYE A S Nonlinear programming: theories and algorithms of some unconstrained optimization methods (steepest descent and Newton's method)[J]. International Journal of Engineering and Management Research, 2020, 10 (2): 1- 12
|
| 28 |
JIANG Z L A new algorithm for computing the inverse and generalized inverse of the scaled factor circulant matrix[J]. Journal of Computational Mathematics, 2008, 26 (1): 112- 122
|
| 29 |
陈金平, 贺昱曜, 巨永锋, 等. 三电平逆变器SHEPWM牛顿下山法求解研究[J]. 电力电子技术, 2013, 47(9): 8-10.
CHEN Jin-ping , HE Yu-yao , JU Yong-feng , et al. SHEWPM of three-level inverter based on newton downhill method [J], Power Electronics , 2013, 47(9): 8-10.
|
| 30 |
LI B, LI Y, RONG X. Locomotion planning and performance analysis of quadruped robot based on ADAMS and MATLAB co-simulation [C]// Proceedings of the 32nd Chinese Control Conference. Xi'an: IEEE, 2013: 5914-5919.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|