| 智能机器人 |
|

|
|
|
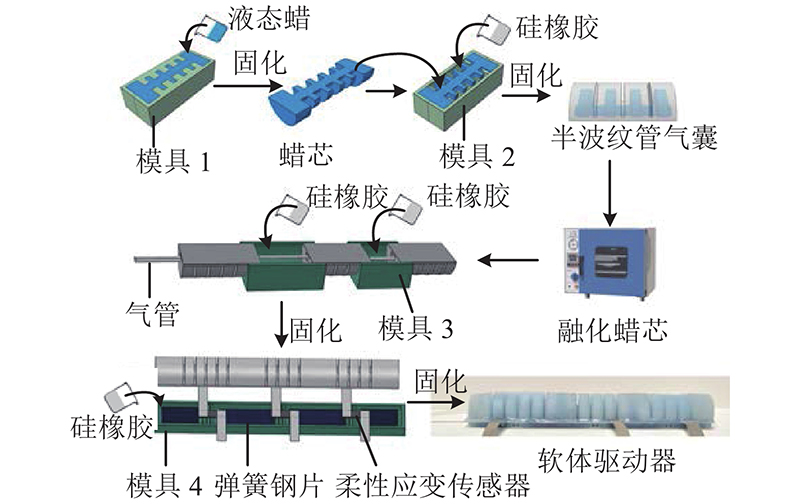
| 用于康复训练的分段式气动软体驱动器 |
刘彩霞1,2( ),潘亭亭2,孙一帆2,李帅2,刘平2,黄英2,*() ),潘亭亭2,孙一帆2,李帅2,刘平2,黄英2,*() |
1. 合肥工业大学 物理学院,安徽 合肥 230601
2. 合肥工业大学 微电子学院,安徽 合肥 230601 |
|
| Segmented pneumatic soft actuator for rehabilitation training |
| Cai-xia LIU1,2(),Ting-ting PAN2,Yi-fan SUN2,Shuai LI2,Ping LIU2,Ying HUANG2,*() |
1. School of Physics, Hefei University of Technology, Hefei 230601, China
2. School of Microelectronics, Hefei University of Technology, Hefei 230601, China |
引用本文:
刘彩霞,潘亭亭,孙一帆,李帅,刘平,黄英. 用于康复训练的分段式气动软体驱动器[J]. 浙江大学学报(工学版), 2022, 56(6): 1127-1134.
Cai-xia LIU,Ting-ting PAN,Yi-fan SUN,Shuai LI,Ping LIU,Ying HUANG. Segmented pneumatic soft actuator for rehabilitation training. Journal of ZheJiang University (Engineering Science), 2022, 56(6): 1127-1134.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.06.009
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I6/1127
|
| 1 |
国家心血管病中心. 中国心血管健康与疾病报告2019[R]. 北京: 科学出版社, 2020: 243-245.
|
| 2 |
贾杰 脑卒中后手功能康复现状[J]. 老年医学与保健, 2015, 21 (3): 129- 131
JIA Jie Status of hand functional rehabilitation after cerebral apoplexy[J]. Geriatrics and Health Care, 2015, 21 (3): 129- 131
|
| 3 |
SUSANTO E A, TONG R K Y, HO N S K Hand exoskeleton robot for assessing hand and finger motor impairment after stroke[J]. HKIE Transactions, 2015, 22 (2): 78- 87
doi: 10.1080/1023697X.2015.1038319
|
| 4 |
UEKI S, KAWASAKI H, ITO S, et al Development of a hand-assist robot with multi-degrees-of-freedom for rehabilitation therapy[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17 (1): 136- 146
doi: 10.1109/TMECH.2010.2090353
|
| 5 |
吴枫, 韩亚丽, 李沈炎, 等 柔性仿生驱动器研究综述[J]. 现代制造工程, 2020, (7): 146- 156
WU Feng, HAN Ya-li, LI Shen-yan, et al Review of soft-bionic actuator[J]. Modern Manufacturing Engineering, 2020, (7): 146- 156
|
| 6 |
ISHIDA M, DROTMAN D, SHIH B, et al Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4163- 4169
doi: 10.1109/LRA.2019.2931263
|
| 7 |
POLYGERINOS P, LYNE S, WANG Z, et al. Towards a soft pneumatic glove for hand rehabilitation [C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 1512-1517.
|
| 8 |
KANG B B, CHOI H, LEE H, et al. Exo-glove poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system [J]. Soft Robotics. 2019, 6(2): 214-227.
|
| 9 |
XIANG C Q, YANG H, SUN Z Y, et al The design, hysteresis modeling and control of a novel SMA-fishing-line actuator[J]. Smart Material Structures, 2017, 26 (3): 037004
doi: 10.1088/1361-665X/aa5b03
|
| 10 |
YAP H K, LIM J H, NASRALLAH F, et al Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors[J]. Frontiers in Neuroscience, 2017, 11: 547
doi: 10.3389/fnins.2017.00547
|
| 11 |
CAPPELLO L, MEYER J T, GALLOWAY K C, et al Assisting hand function after spinal cord injury with a fabric-based soft robotic glove[J]. Journal of Neuroengineering and Rehabilitation, 2018, 15: 59
doi: 10.1186/s12984-018-0391-x
|
| 12 |
SUN Z S, GUO Z H, TANG W Design of wearable hand rehabilitation glove with soft hoop-reinforced pneumatic actuator[J]. Journal of Central South University, 2019, 26: 106- 119
doi: 10.1007/s11771-019-3986-x
|
| 13 |
POLYGERINOS P, WANG Z, GALLOWAY K C, et al Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135- 143
doi: 10.1016/j.robot.2014.08.014
|
| 14 |
YAP H K, LIM J H, NASRALLAH F, et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness [C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015, 4967-4972.
|
| 15 |
WANG J B, FEI Y Q, PANG W Design, modeling, and testing of a soft pneumatic glove with segmented PneuNets bending actuators[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24 (3): 990- 1001
doi: 10.1109/TMECH.2019.2911992
|
| 16 |
戴红. 人体运动学[M]. 北京: 人民卫生出版社, 2008: 103-115.
|
| 17 |
陈家照, 黄闽翔, 王学仁, 等 几种典型的橡胶材料本构模型及其适用性[J]. 材料导报, 2015, 29 (Suppl.1): 118- 120
CHEN jia-zhao, HUANG min-xiang, WANG xue-ren, et al Typical constitutive models of rubber materials and their ranges of application[J]. Materials Reports, 2015, 29 (Suppl.1): 118- 120
|
| 18 |
殷闻, 靳晓雄, 仝光 两种常用橡胶本构模型的有限元分析及其仿真[J]. 上海电机学院学报, 2010, 13 (4): 215- 218
YIN Wen, JIN Xiao-xiong, TONG Guang Finite element analysis of rubber constitutive models and simulation[J]. Journal of Shanghai Dianji University, 2010, 13 (4): 215- 218
doi: 10.3969/j.issn.2095-0020.2010.04.007
|
| 19 |
燕山, 王伟 橡胶类超弹性本构模型中材料参数的确定[J]. 橡胶工业, 2014, 61 (8): 453- 457
YAN Shan, WANG Wei Determination of material parameters for rubberlike hyperelastic constitutive models[J]. China Rubber Industry, 2014, 61 (8): 453- 457
doi: 10.3969/j.issn.1000-890X.2014.08.001
|
| 20 |
ALICI G, CANTY T, MUTLU R, et al Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers[J]. Soft Robotics, 2018, 5 (1): 24- 35
doi: 10.1089/soro.2016.0052
|
| 21 |
齐开乐 软体弯曲驱动器设计与建模分析[J]. 洛阳理工学院学报: 自然科学版, 2021, 31 (3): 60- 65
QI kai-le Design and modeling analysis of a soft bending actuator[J]. Journal of Luoyang Institute of Science and Technology: Natural Science Edition, 2021, 31 (3): 60- 65
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|