

软体外骨骼康复手套主要依靠软体驱动器实现手指康复运动,因此软体驱动器的性能直接影响康复效果. 软体驱动器的驱动方式有液压驱动[6]、气压驱动[7]、线驱动[8]、形状记忆合金驱动[9]等,其中气压驱动由于驱动简单、变形量大、重量轻和气体来源广等优点被广泛关注. Polygerinos等[7]制作用于软体外骨骼康复手套的气动式软体驱动器,通过控制软体手套弯曲带动患者手指完成康复动作. Yap等[10]设计织物增强气动式软体驱动器用于手功能康复与辅助. Cappello等[11]设计了基于双向织物软体驱动器的软体康复手套. Sun等[12]提出圆环加箍型气动式软体驱动器. 这些软体驱动器只能帮助手指实现简单的屈伸运动,与手指贴合度差,其运动轨迹与人手实际运动轨迹有很大差别. Polygerinos等[13]通过引入纤维增强使软体驱动器具有各向异性. Yap等[14]研制出可变刚度气动软体驱动器. Wang等[15]提出内嵌气囊式分段气动软体驱动器. 这些软体驱动器采用分段式设计,增加了软体驱动器与手指的贴合度,但是每个关节不能独立弯曲,无法实现手指关节独立运动,灵活性有限. 此外,这些软体驱动器缺乏本体感知能力,存在运动传递不准确的问题.
针对上述问题,本研究基于仿生原理提出用于手指康复的分段式独立驱动气动软体驱动器. 设计3段具有锯齿结构的半波纹管气囊作为指关节,锯齿段两端嵌入1层弹簧钢片作为指骨,充气时锯齿段部分弯曲,指骨部分不弯曲,底层嵌入柔性应变传感器,实现软体驱动器本体感知. 通过有限元建模研究半波纹管气囊尺寸,并借助3D打印技术及失蜡铸造工艺制备软体驱动器,并对软体驱动器弯曲性能、运动轨迹、末端输出力和本体感知能力等进行测试.
1. 软体驱动器设计与仿真分析
1.1. 软体驱动器设计
为了实现更优手指康复训练,软体驱动器结构设计须符合人类手指结构和运动规律. 如图1所示,食指共有3节指骨和3个指关节,分别是掌指关节、近节指骨、近端指间关节、中节指骨、远端指间关节和远节指骨,指骨间通过指关节以及周围软组织连接,主要依靠肌肉收缩驱动关节旋转弯曲实现手指运动[16]. 食指每个关节运动范围θIF不同,各关节的运动范围如表1所示. 本研究设计的分段式软体驱动器由掌指关节和指间关节独立驱动,驱动器结构如图1所示. 驱动器由3个具有锯齿段的半波纹管气囊组成,锯齿段两端底层嵌入弹簧钢片,关节1、2和3,分别对应掌指关节、近端指间关节和远端指间关节. 在气压驱动时,与弹簧钢片处相比,软体驱动器在锯齿段更容易弯曲,弯曲形状贴合手指. 弹簧钢片作为扭矩补偿层,作用是限制软体驱动器的畸形形变.
图 1
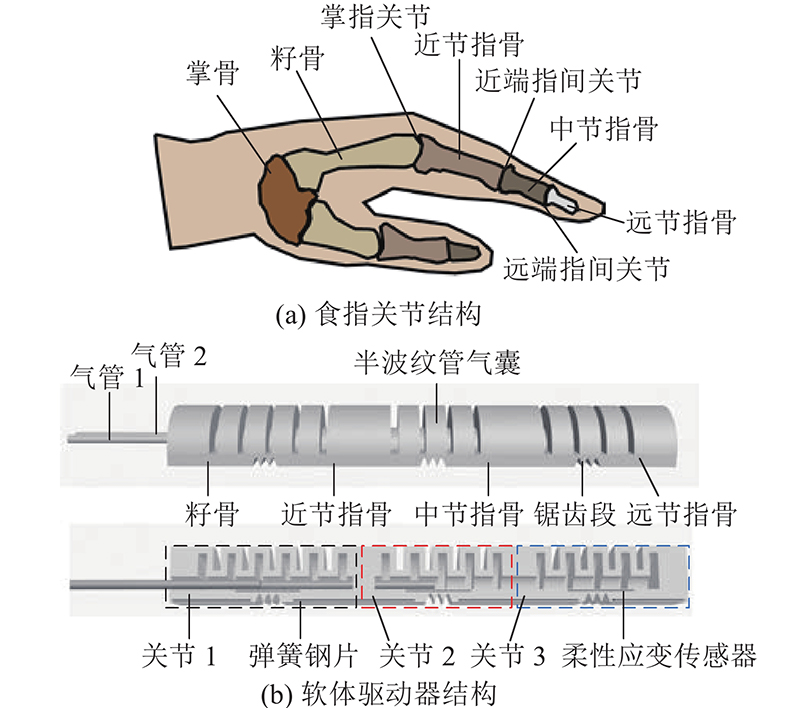
表 1 食指各关节的运动范围
Tab.1
| 关节 | 运动方向 | θIF/(°) |
| 掌指关节 | 屈曲 | 0~90 |
| 近端指间关节 | 屈曲 | 0~100 |
| 远端指间关节 | 屈曲 | 0~80 |
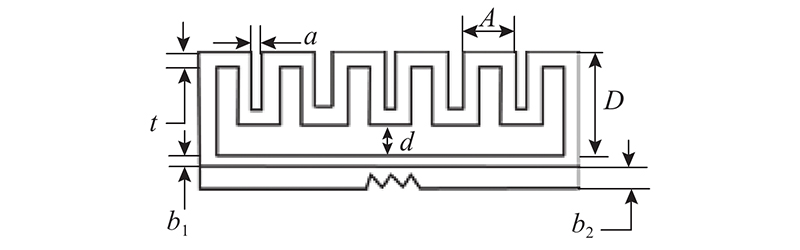
考虑手指各关节间的耦合性,掌指关节和指间关节处气囊分别连接气管。气管1连接关节1,单独驱动掌指关节;气管2连接关节2、3,驱动指间关节弯曲. 在锯齿段上方分别嵌入3个柔性应变传感器,实现软体驱动器的本体感知,监测其运动状态. 半波纹管气囊尺寸标注如图2所示. 图中,A为半波纹管气囊波纹宽度,a为相邻半波纹管的间距,t为壁厚,d为气道内径,D为半波纹管气囊外径,b1为半波纹管气囊底层厚度,b2为内嵌弹簧钢片层厚度.
图 2
1.2. 半波纹管气囊气动变形分析
选择硅橡胶材料Ecoflex 00-30作为软体驱动器的本体材料,Ecoflex 00-30是非线性的超弹性材料,具有各向同性和不可压缩性. 对于各向同性的硅橡胶,基于应力应变关系,其应变能函数[17]W为
式中:
式中:
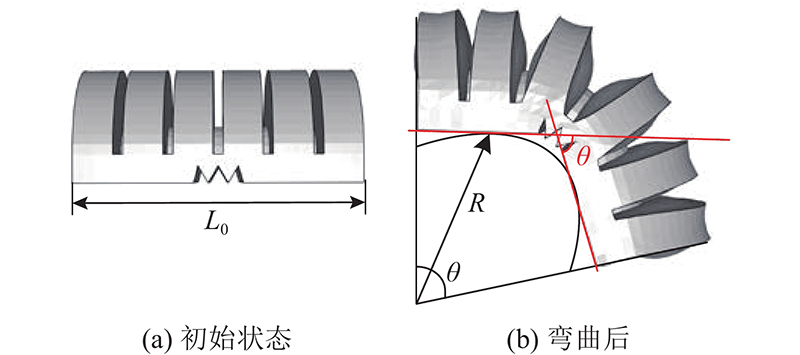
如图3所示为半波纹管气囊在气压作用下的弯曲状态图. 当沿气囊长度分布方向施加气压p时,半波纹管气囊变形弯曲,有
图 3
式中:
式中:S0为气囊内截面的初始面积;S为充气变形后的内截面面积,
将式(5)~(9)代入方程式(11),有
1.3. 软体驱动器仿真分析
由半波纹管气囊气动变形理论分析结果可知,几何尺寸参数是半波纹管气囊弯曲性能的主要影响因素. 有限元仿真过程采用硅橡胶Yeoh模型表示硅胶材料特性. 由文献[22]可知,Ecoflex 00-30材料参数C10=0.11、C20=0.02,弹簧钢片材料参数E=2 100 GPa,泊松比ν=0.2. 设置最大气压为0.1 MPa,D=10 mm、d=3 mm、b1=1 mm、b2=3 mm. 通过控制变量法,分别对影响半波纹管气囊弯曲特性和末端输出力的尺寸参数:壁厚t、半波纹管波纹宽度A、相邻半波纹管的间距a、半波纹管气囊波纹数目n进行有限元仿真分析.
1)分别取t=1.0、1.5、2.0、2.5 mm进行仿真分析,弯曲角度与末端输出力仿真结果和半波纹管气囊在100 kPa时的仿真位移云图如图4所示. 在相同气压下,随着壁厚增加,半波纹管气囊弯曲角度θ和末端输出力F均呈现减小的趋势. 当t=1 mm时,弯曲效果最好,末端输出力最大. 但壁厚过小会导致径向变形过大,承压的能力受到限制,大气压时存在涨破风险,过大壁厚会降低软体驱动器柔性,气压驱动时弯曲角度达不到手指弯曲范围. 根据仿真结果,选择t=1.5 mm进行研究.
图 4
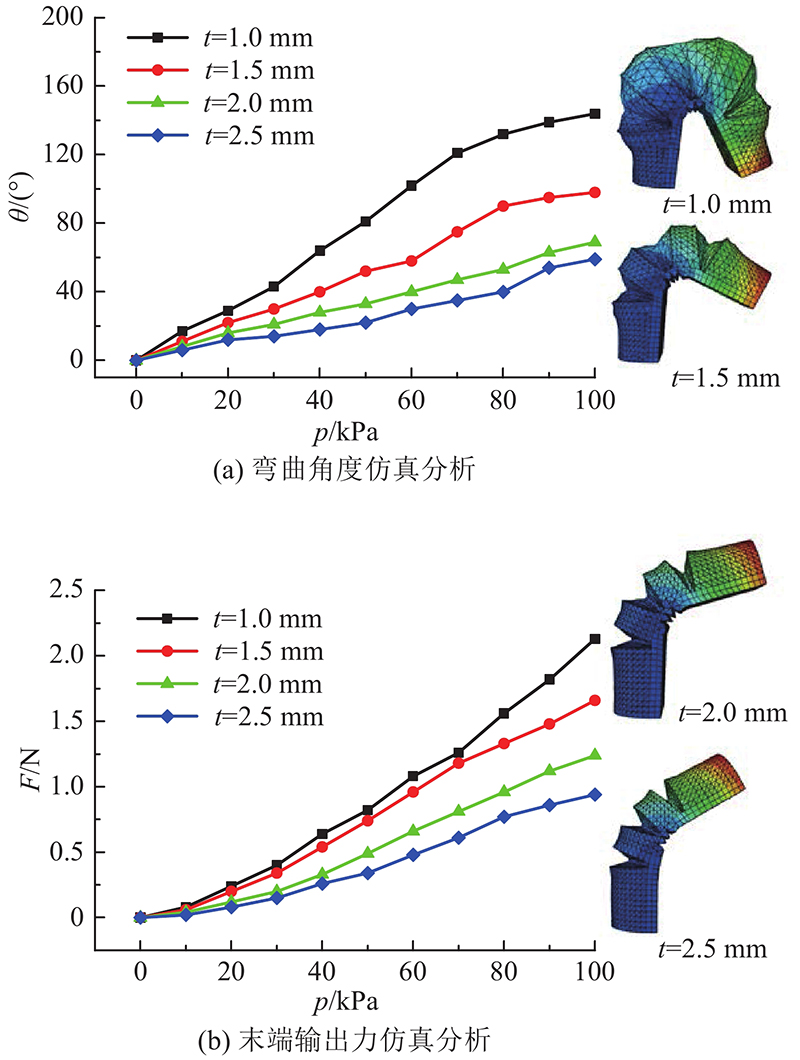
图 4 不同壁厚时半波纹管气囊的仿真结果
Fig.4 Simulation results of semi-bellows airbag with different wall thickness
2)分别取A=4、5、6、7 mm进行仿真,弯曲角度与末端输出力仿真结果和半波纹管气囊在100 kPa时的仿真位移云图如图5所示. 在相同气压下,A与θ、F成反比,当气压为100 kPa,A=4 mm时,气囊性能最好,θ=151°,F=2.25 N. 采用失蜡铸造工艺制作半波纹管气囊,考虑实际制作过程简便性以及成型难易程度,选择A=5 mm的半波纹管气囊进行后续研究.
图 5
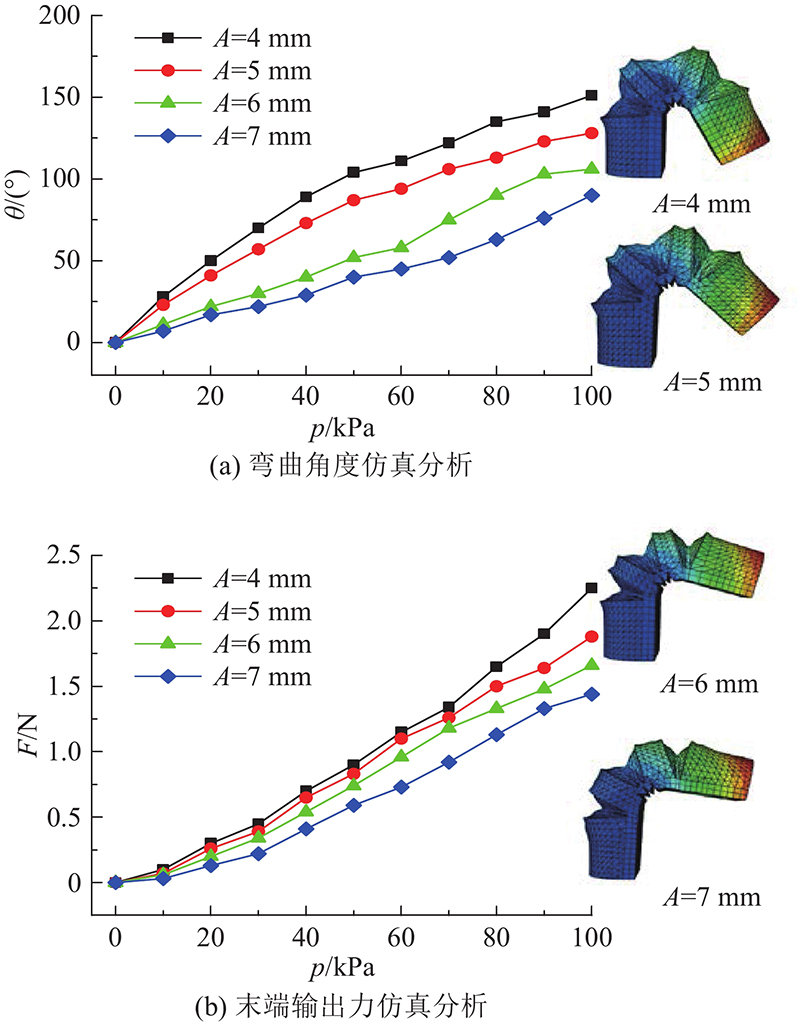
图 5 不同波纹宽度时半波纹管气囊的仿真结果
Fig.5 Simulation results of semi-bellows airbag with different bellows widths
3)分别取a=1、2、3、4 mm进行仿真,弯曲角度与末端输出力仿真结果和半波纹管气囊在100 kPa时的仿真位移云图如图6所示. 在相同气压下,随着a的增加,相邻半波纹管气囊间的相互作用力减弱,θ、F变小. 当气压为100 kPa,a从1 mm增加至4 mm时,半波纹管气囊弯曲角度从128°减小至70°,末端输出力从1.88 N降低至0.99 N. 后续选择a=1 mm进行研究.
图 6
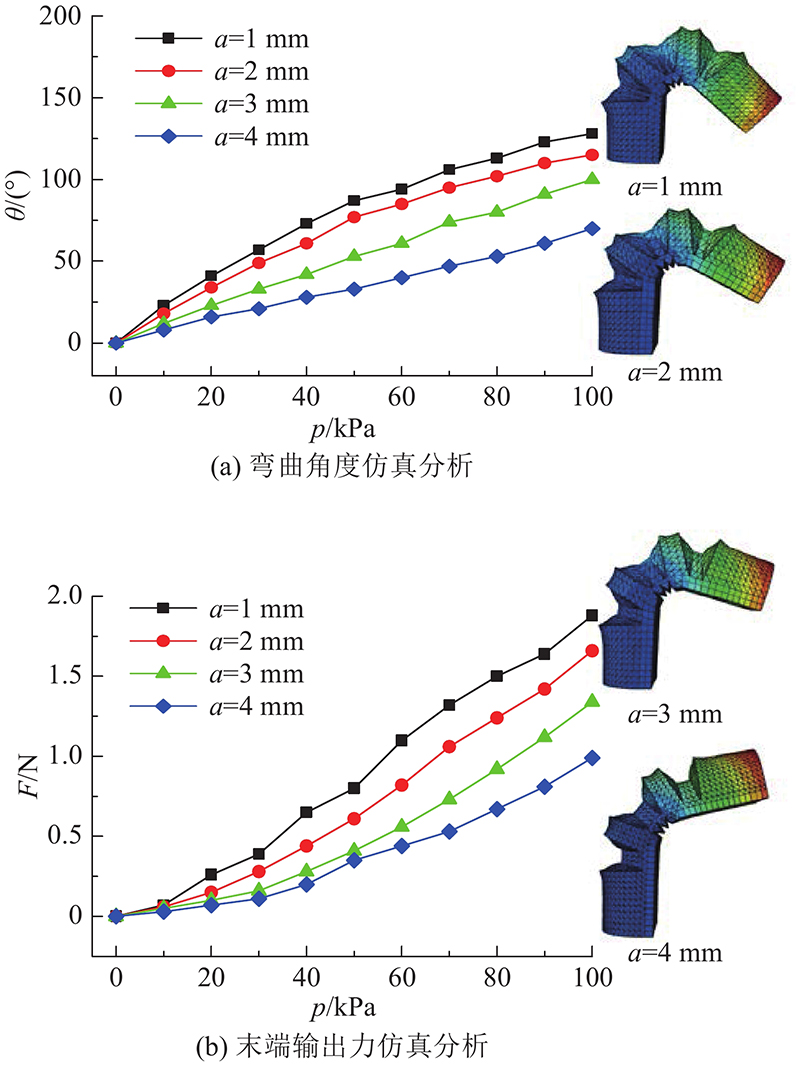
图 6 不同波距时半波纹管气囊的仿真结果
Fig.6 Simulation results of semi-bellows airbag with different wave distances
4)仿真研究波纹数目n对气囊特性的影响,弯曲角度与末端输出力仿真结果和半波纹管气囊在100 kPa时的仿真位移云图如图7所示. 相同气压下随着n增加,半波纹管气囊初始长度
图 7

图 7 不同波纹数目时半波纹管气囊的仿真结果
Fig.7 Simulation results of semi-bellows airbag with different number of bellows
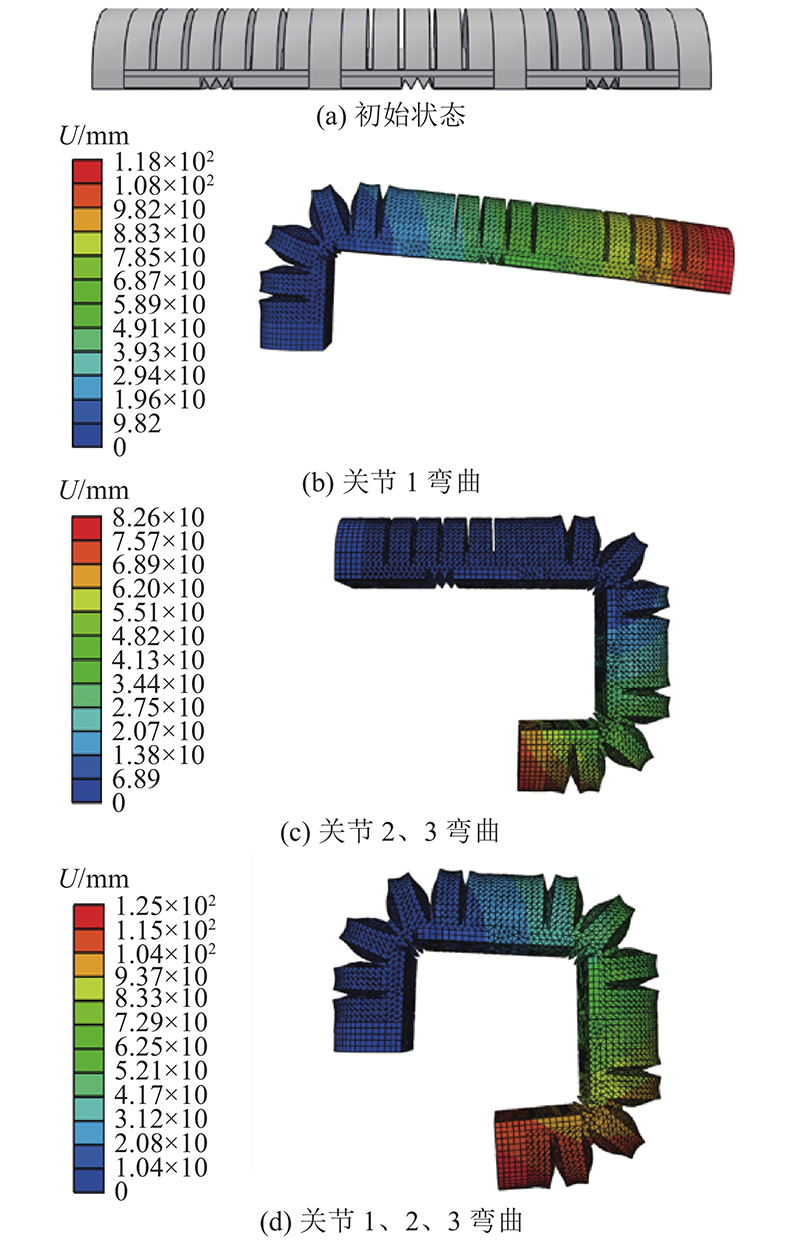
根据人体手指尺寸,选择t=1.5 mm、A=5 mm、a=1 mm,n=5、6的半波纹管气囊制作软体驱动器. 软体驱动器的关节1选择n=6的半波纹管气囊,关节2、3选择n=5的半波纹管气囊. 软体驱动器仿真结果如图8所示. 图中,U为位移. 可知,当分别单独向气管1、2充气时,关节1和关节2、3可在气压作用下独立运动,且软体驱动器在有锯齿段的地方弯曲,在分布有弹簧钢片的地方不弯曲. 同时向气管1、2充气时,3个关节同时弯曲,弯曲形态与人手弯曲轨迹相似.
图 8
2. 软体驱动器特性测试及应用
2.1. 软体驱动器的制作
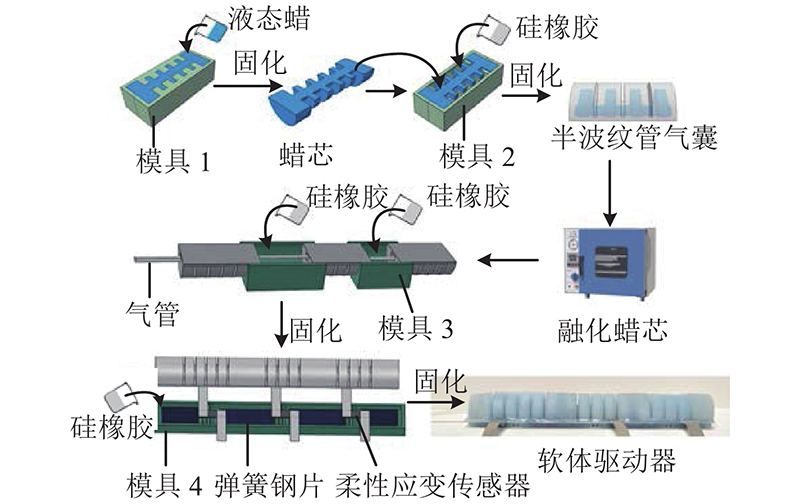
通过3D打印和失蜡铸造工艺制作软体驱动器,利用3D打印机打印4个模具:制造蜡芯的模具1、制作半波纹管气囊的模具2、连接半波纹管气囊的模具3、添加锯齿段封装柔性应变传感器和弹簧钢片的模具4. 软体驱动器制作流程如图9所示. 在模具1中倒入液体蜡,室温等待40 min使蜡芯完全冷却;取出蜡芯放入模具2,倒入硅橡胶混合液,室温固化4 h后直立放入干燥箱加热去除蜡芯;分别将2个半波纹管气囊放入模具3的两端,放置气管,倒入硅橡胶混合液并将其在80 ℃下固化30 min,实现不同半波纹管气囊连接;模型固化后脱模取出并使用模具4添加锯齿段底层,嵌入柔性应变传感器,实现软体驱动器制备. 制作的单个软体驱动器重量为28 g,人手在佩戴时不易产生疲惫感.
图 9
2.2. 软体驱动器特性测试
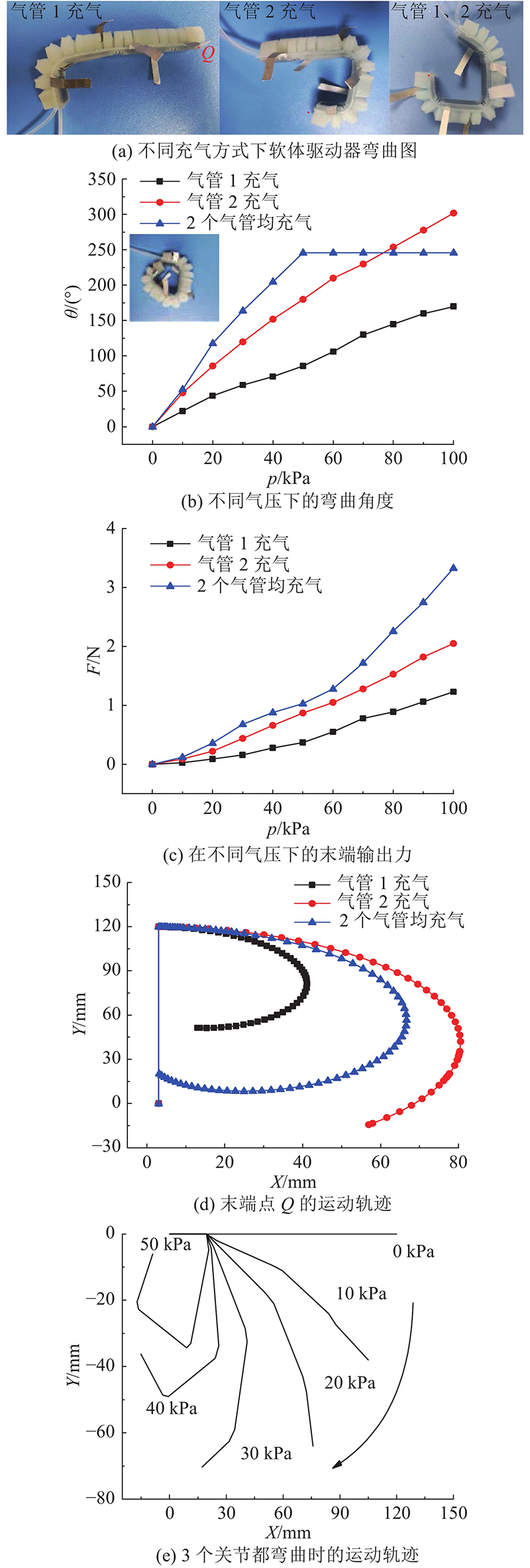
如图10所示,搭建实验测试平台测试软体驱动器特性. 在空载状态下,分别向软体驱动器的2个气管充入气体,软体驱动器弯曲状态如图10(a)所示. 当向气管1充气时,关节1弯曲;当向气管2充气时,关节2、3弯曲;当同时向气管1、2充气时,3个关节均弯曲. 软体驱动器在不同气压下的弯曲角度如图10(b)所示. 可知,弯曲角度随气体压力增加而增大. 当向气管1充气时,关节1弯曲角度小于n=6的半波纹管气囊仿真时的弯曲角度. 这一方面是柔性传感器有微小的限制,另一方面是仿真时没有考虑重力因素造成的. 当向气管2充气时,软体驱动器关节2、3弯曲,θ=302°. 当向3个关节同时充气时,随着气压增加软体驱动器逐渐弯曲,由于没有手指的阻挡(空载状态),当p=50 kPa时,软体驱动器首尾相互接触,弯曲角度达到246°后不再继续增加,小于向气管2充气时软体驱动器的弯曲角度. 软体驱动器末端输出力测试结果如图10(c)所示. 可知,软体驱动器末端输出力随气压增加而增大. 当向气管1充气时,软体驱动器末端距离关节1较远,其本体材料软,因此末端输出力比n=6的半波纹管气囊末端输出力小. 在软体驱动器末端标记点Q,充气过程中,Q位置发生改变,软体驱动器在不同关节弯曲时Q的运动轨迹如图10(d)所示. 可以看出,3个关节同时充气,软体驱动器存在首尾相接的情况. 使用坐标纸记录软体驱动器3个关节在p=0~50 kPa同时驱动的运动轨迹,结果如图10(e)所示. 可知,软体驱动器在锯齿段处弯曲明显,运动轨迹符合人手弯曲轨迹.
图 10
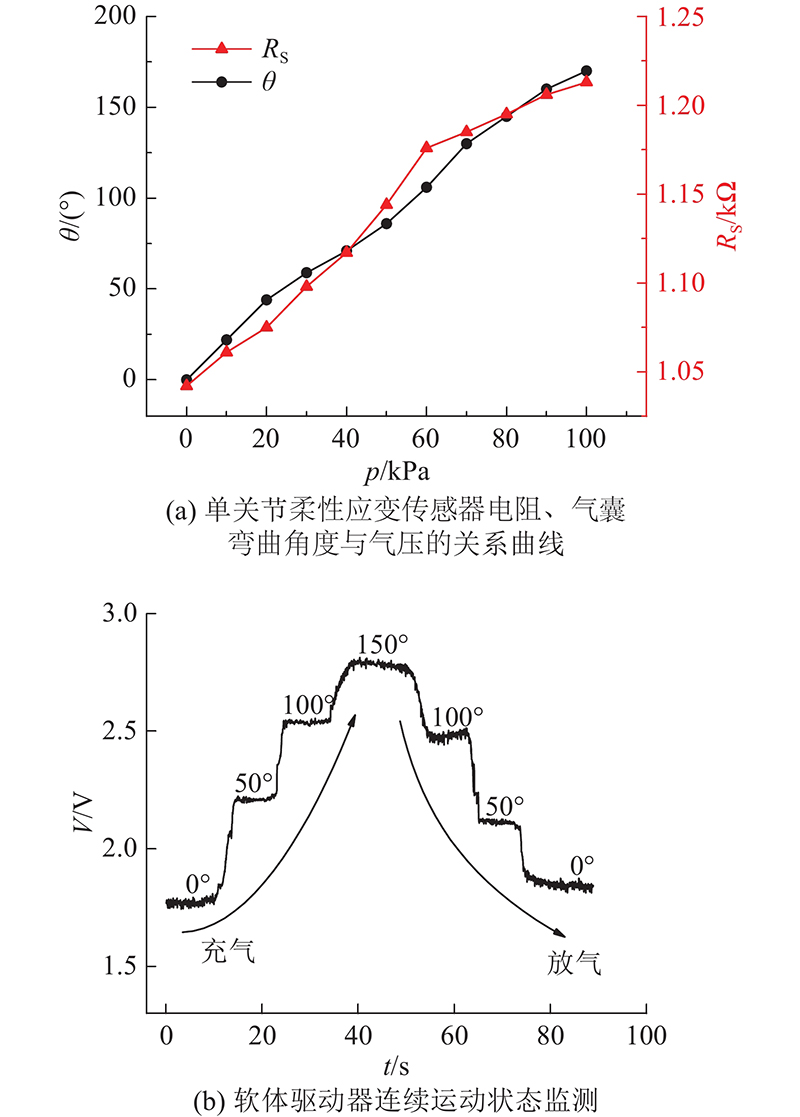
如图11所示,将柔性应变传感器用于软体驱动器本体感知. 关节1柔性应变传感器电阻RS、软体驱动器弯曲角度与输入气压之间的关系如图11(a)所示. 随着气压增加,柔性应变传感器电阻和软体驱动器弯曲角度均呈增加趋势;在0~100 kPa时,相同气压下,θ、RS具有一一对应的关系. 通过数据采集卡采集关节1在0~150°弯曲时的传感器电压信号V的变化,结果如图11(b)所示. 弯曲过程分为充、放气阶段,软体驱动器弯曲角度每达到50°、100°、150°时,暂时停止充气或放气,采集传感器的电信号. 可以看出,在充气过程中,软体驱动器弯曲增大,柔性应变传感器电压信号增加;在放气过程中,软体驱动器弯曲减小,柔性应变传感器电压信号减小,能够恢复到最初状态. 当弯曲角度保持在50°、100°和150°时,柔性应变传感器电压信号基本保持不变. 软体驱动器在充放气过程中响应速度稍有差异,电压信号在相同弯曲角度下也存在较小差异.
图 11
2.3. 软体驱动器应用
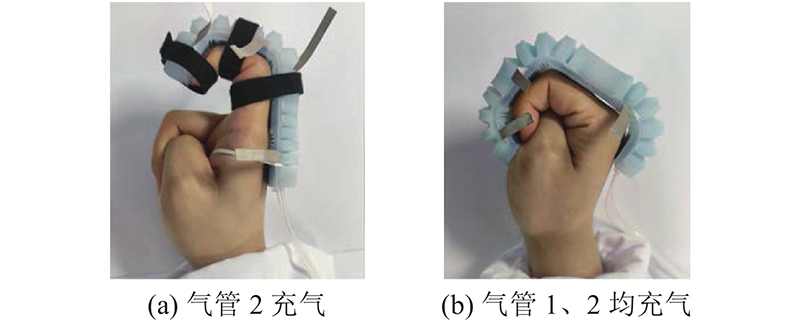
如图12所示,将软体驱动器附着在受试者食指表面,通过对不同气管充入气体,实现3个手指关节不同程度的弯曲. 当向气管2充气时,软体驱动器的关节2、3弯曲,带动食指指间关节弯曲. 当同时向气管1、2充入气体时,软体驱动器的关节1、2、3均弯曲,带动整个食指弯曲. 分段式软体驱动器3个关节可以分开驱动,也可以同时驱动,能够实现带动手指进行灵活运动,其运动轨迹安全、有效、贴合手指运动.
图 12
3. 结 语
根据人体手指解剖结构,考虑手指关节独立运动在手部康复中的重要作用,设计分段式气动软体驱动器,改善了软体驱动器与手指的贴合度,增加了软体驱动器运动的灵活性. 通过数学建模和有限元仿真分析,得到软体驱动器结构尺寸参数对驱动器弯曲特性、末端输出力的影响,提高了驱动性能. 对软体驱动器弯曲性能、末端输出力、运动轨迹及本体感知能力的测试发现,软体驱动器能够驱动手指各关节独立弯曲和伸展,实时监测手部运动状态,满足手指康复训练的需求,显示了该软体驱动器在手部康复方面的潜力. 本研究工作为软体可穿戴设备在手部辅助和康复方面提供了新的思路. 在后续研究中将利用柔性应变传感器实时监测手部运动状态,反馈给控制单元,实现系统的闭环控制.
参考文献
脑卒中后手功能康复现状
[J].
Status of hand functional rehabilitation after cerebral apoplexy
[J].
Hand exoskeleton robot for assessing hand and finger motor impairment after stroke
[J].DOI:10.1080/1023697X.2015.1038319 [本文引用: 1]
Development of a hand-assist robot with multi-degrees-of-freedom for rehabilitation therapy
[J].DOI:10.1109/TMECH.2010.2090353 [本文引用: 1]
柔性仿生驱动器研究综述
[J].
Review of soft-bionic actuator
[J].
Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot
[J].DOI:10.1109/LRA.2019.2931263 [本文引用: 1]
The design, hysteresis modeling and control of a novel SMA-fishing-line actuator
[J].DOI:10.1088/1361-665X/aa5b03 [本文引用: 1]
Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors
[J].DOI:10.3389/fnins.2017.00547 [本文引用: 1]
Assisting hand function after spinal cord injury with a fabric-based soft robotic glove
[J].DOI:10.1186/s12984-018-0391-x [本文引用: 1]
Design of wearable hand rehabilitation glove with soft hoop-reinforced pneumatic actuator
[J].DOI:10.1007/s11771-019-3986-x [本文引用: 1]
Soft robotic glove for combined assistance and at-home rehabilitation
[J].DOI:10.1016/j.robot.2014.08.014 [本文引用: 1]
Design, modeling, and testing of a soft pneumatic glove with segmented PneuNets bending actuators
[J].DOI:10.1109/TMECH.2019.2911992 [本文引用: 1]
几种典型的橡胶材料本构模型及其适用性
[J].
Typical constitutive models of rubber materials and their ranges of application
[J].
两种常用橡胶本构模型的有限元分析及其仿真
[J].DOI:10.3969/j.issn.2095-0020.2010.04.007
Finite element analysis of rubber constitutive models and simulation
[J].DOI:10.3969/j.issn.2095-0020.2010.04.007
橡胶类超弹性本构模型中材料参数的确定
[J].DOI:10.3969/j.issn.1000-890X.2014.08.001 [本文引用: 1]
Determination of material parameters for rubberlike hyperelastic constitutive models
[J].DOI:10.3969/j.issn.1000-890X.2014.08.001 [本文引用: 1]
Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers
[J].DOI:10.1089/soro.2016.0052 [本文引用: 1]
软体弯曲驱动器设计与建模分析
[J].
Design and modeling analysis of a soft bending actuator
[J].
Some forms of the strain energy function for rubber
[J].DOI:10.5254/1.3538343 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}