在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备。近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] 。这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] 。
随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] 。为此,许多学者提出了差异化的减速器结构设计方案。例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好。尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足。此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用。
针对减速器的动态性能,国内外学者开展了大量研究。肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准。Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑。程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致。李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析。崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性。Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化。
现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段。杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低。徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考。Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值。尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求。为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考。徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化。姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究。
本文以自主设计的差速行星减速器为研究对象,运用多体动力学仿真来验证其传动原理的可行性,并探究齿轮间啮合力的变化规律。然后,通过振动试验对该减速器的动态特性进行测试与分析。最后,为了提升减速器的性能,以减振化、轻量化及绿色化为优化目标,从结构设计方面开展多目标优化。
1 差速行星减速器的结构与工作原理
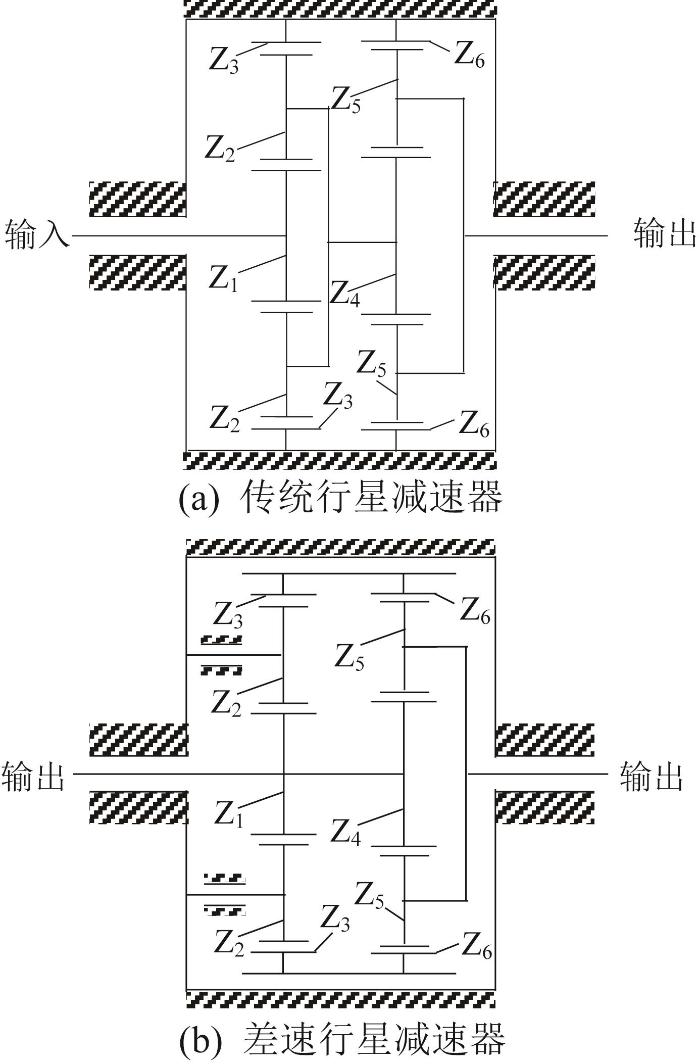
差速行星减速器是一种近年来兴起的新型齿轮传动机构,其技术核心在于借助差动轮系的转速配比关系,实现从输入的高速小转矩到满足设备需求的低速大转矩的转变。与传统行星减速器相比,差速行星减速器具有传动比大的显著优势。2种不同类型的二级行星减速器如图1 所示。
图1
图1
传统行星减速器与差速行星减速器的结构简图
Fig.1
Structure diagram of traditional planetary reducer and differential planetary reducer
1.1 减速器传动比计算
行星减速器的传动原理为:输入动力通过各级行星齿轮副的啮合传动,逐步实现输出转速降低的转换[9 ] 。对于图1 (a)所示的传统行星减速器,当输入轴的转速为n i n o i X 的计算式如下:
i X = n i n o = 1 + z 3 z 1 1 + z 6 z 4 (1)
式中:z 1 、z 3 、z 4 、z 6 为齿轮Z1 、Z3 、Z4 、Z6 的齿数。
对于图1 (b)所示的差速行星减速器,其传动比i C 的计算式如下:
i C = n i n o = z 3 ⋅ z 4 + z 3 ⋅ z 6 z 3 ⋅ z 4 - z 1 ⋅ z 6 (2)
经系统分析可知,差速行星减速器具有4个区别于传统行星减速器的核心特征,具体如下:
2)Z1 为输入端太阳轮,Z4 为输出端太阳轮,其转速满足n 1 = n 4 = n i
3)齿圈Z3 与齿圈Z 6 通过销轴固定安装且转速相同,其转速方向与n i
1.2 减速器齿数配置
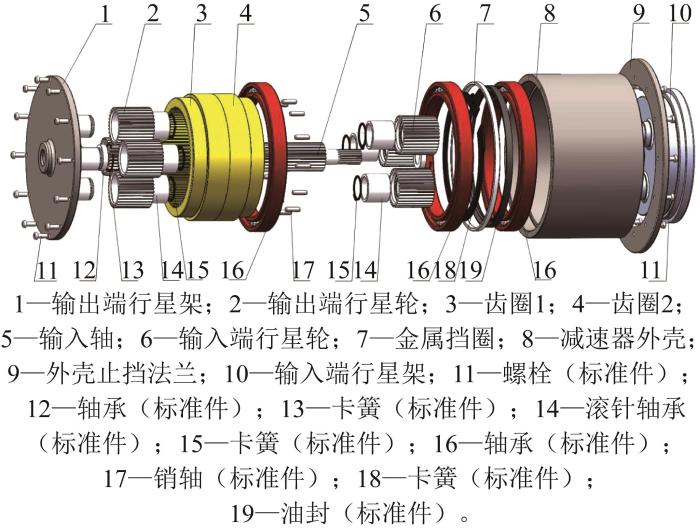
基于图1 (b)所示的传动方案,结合实际工况对行星轮系的齿数配置要求,完成差速行星减速器的结构设计,具体设计方案如图2 所示。差速行星减速器由定轴轮系和差动轮系组成。其中,输入端太阳轮、输入端行星轮、齿圈2组成定轴轮系;输出端太阳轮、输出端行星轮、齿圈1组成差动轮系。为了提升减速器齿轮传动系统的同轴度,对输入端太阳轮和输出端太阳轮实施一体化加工,并将其直接加工在减速器的输入轴上。为方便表述,将定轴轮系和差动轮系中的各齿轮依次记为齿轮1、2、3和齿轮4、5、6。减速器的输入轴通过联轴器与电机直连;齿轮1通过齿轮2的换向作用实现齿轮3和齿轮6的反向转动。差动轮系中的齿轮5同时与齿轮6和齿轮4啮合,从而使输出端行星架输出所需转速。
图2
图2
差速行星减速器爆炸图
Fig.2
Explosion view of differential planetary reducer
在差速行星减速器中,各齿轮的模数均为1.5 mm,其齿数配置如表1 所示。由式(2)计算可得,差速行星减速器的传动比i C = 210 i X = 22
2 差速行星减速器多体动力学仿真
2.1 多体动力学仿真模型构建
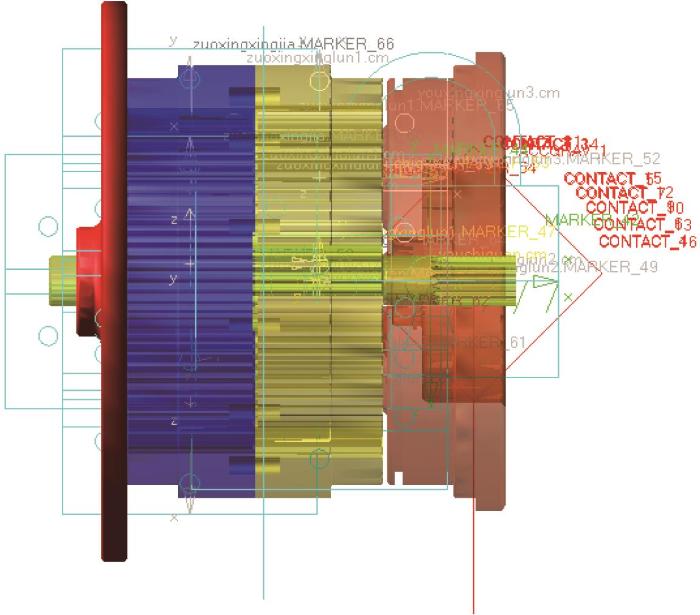
为验证上述初步设计的差速行星减速器传动机理的可行性,开展多体动力学仿真分析。首先,采用SolidWorks软件对差速行星减速器进行三维建模。为了提高仿真分析的效率,基于“保留核心动力学构件、排除其余无关构件”的原则,对减速器三维模型进行适当简化[10 ] 。简化处理后减速器模型主要包含输入轴、定轴轮系(齿轮1、2、3)、输入端行星架、差动轮系(齿轮4、5、6)及输出端行星架等构件。然后,将简化后的模型以Parasolid格式导入ADAMS软件,用于构建多体动力学仿真模型。最后,根据差速行星减速器的工作原理,对多体动力学仿真模型设置合适的约束条件与接触关系[13 ] 。
1)设置固定副。齿轮1所在的轴为输入轴,其转速经各中间齿轮减速后通过输出端行星架输出。在减速器运行过程中,齿轮2的支架保持固定状态,设置其相对于大地为固定副;由于齿轮3与齿轮6通过销轴连接,设置齿轮6相对于齿轮3为固定副。
2)设置转动副。输入轴需跟随电机同步转动;齿轮2相对于输入端行星架进行自转;齿轮3通过内啮合方式与齿轮2传动,其转动方向与齿轮1相反;齿轮5除了绕自身轴线自转外,还相对于大地进行公转;输出端行星架作为输出构件,相对于大地进行公转。因此,设置输入轴、齿轮3以及输出端行星架相对于大地为转动副;设置齿轮2相对于输入端行星架为转动副;设置齿轮5相对于输出端行星架为转动副。
3)设置接触关系。接触力的设置直接影响动力学响应仿真结果。基于ADAMS软件中的Impact函数,模拟齿轮啮合的接触关系。Impact函数通过刚度系数和阻尼系数来计算接触力,从而实现齿轮间啮合力的仿真模拟。差速行星减速器中各齿轮副间均存在接触关系,对齿轮1与齿轮2、齿轮4与齿轮5、齿轮2与齿轮3、齿轮5与齿轮6设置对应的接触关系。
差速行星减速器各构件间的约束设置如表2 所示,各齿轮的材料及其基本参数如表3 所示。
基于上述约束条件和材料参数,构建差速行星减速器的多体动力学仿真模型,如图3 所示。
图3
图3
差速行星减速器多体动力学仿真模型
Fig.3
Multi-body dynamics simulation model of differential planetary reducer
2.2 角速度仿真分析
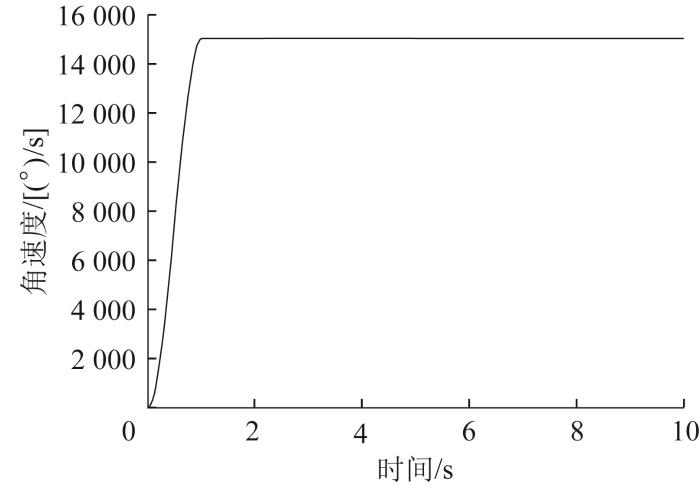
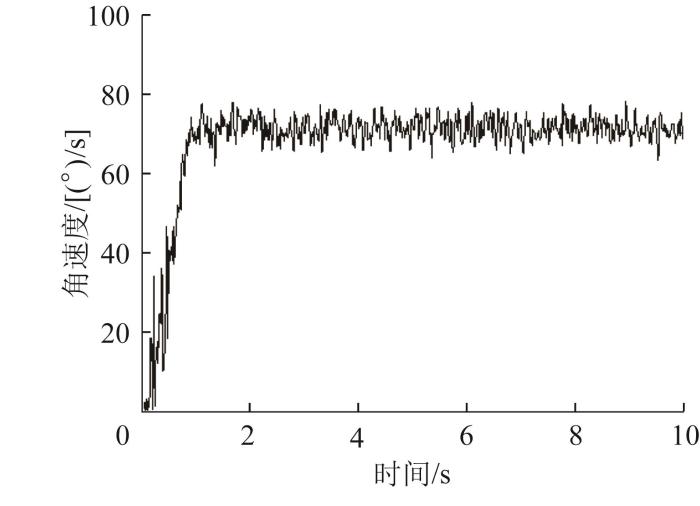
在输入转速为2 500 r/min的工况下,开展差速行星减速器多体动力学仿真。为了避免启动阶段的传动冲击,采用step阶跃函数进行调控,在输入轴上施加驱动函数STEP(time, 0, 0d, 1, 15000d)。设仿真时间为10 s,步数为1 000,对减速器输入、输出构件的角速度进行仿真分析。求解结束后,提取输入轴与输出端行星架的角速度曲线,分别如图4 和图5 所示。
图4
图4
输入轴角速度曲线
Fig.4
Angular velocity curve of input shaft
图5
图5
输出端行星架角速度曲线
Fig.5
Angular velocity curve of output planet carrier
由图4 可知,在0—1 s内,输入轴的角速度处于加速阶段;在2—10 s内,输入轴的角速度保持不变,表明减速器处于稳定运行阶段。由图5 可知,输出端行星架的角速度在初始阶段存在突变,当减速器运行平稳后,其角速度仍存在周期性波动,这是由齿轮啮合产生的周期性内部激励引起的。为保证分析的可靠性及准确性,需对原始数据进行预处理,以去除不合理数据,随后基于预处理数据进行定量分析。差速行星减速器传动比的理论值与仿真值对比如表4 所示。由表4 可知,该减速器传动比的仿真值与理论值高度吻合,两者的相对误差小于5%,这充分验证了差速行星减速器传动机理的可行性,同时也明确了所构建的多体动力学仿真模型的可靠性。
2.3 啮合力仿真分析
在行星减速器动态传递输入转矩的过程中,由于各齿轮副间啮合运动的周期性,其会产生周期性的啮合力。该啮合力作为齿轮传动系统的内部激励源,会引发系统振动响应。齿轮间的动态啮合力与齿轮传动系统振动响应在本质上是激励与动态响应的关系。因此,研究齿轮间的啮合力不仅可验证行星减速器的运行稳定性,还能揭示其振动机理[14 ] 。
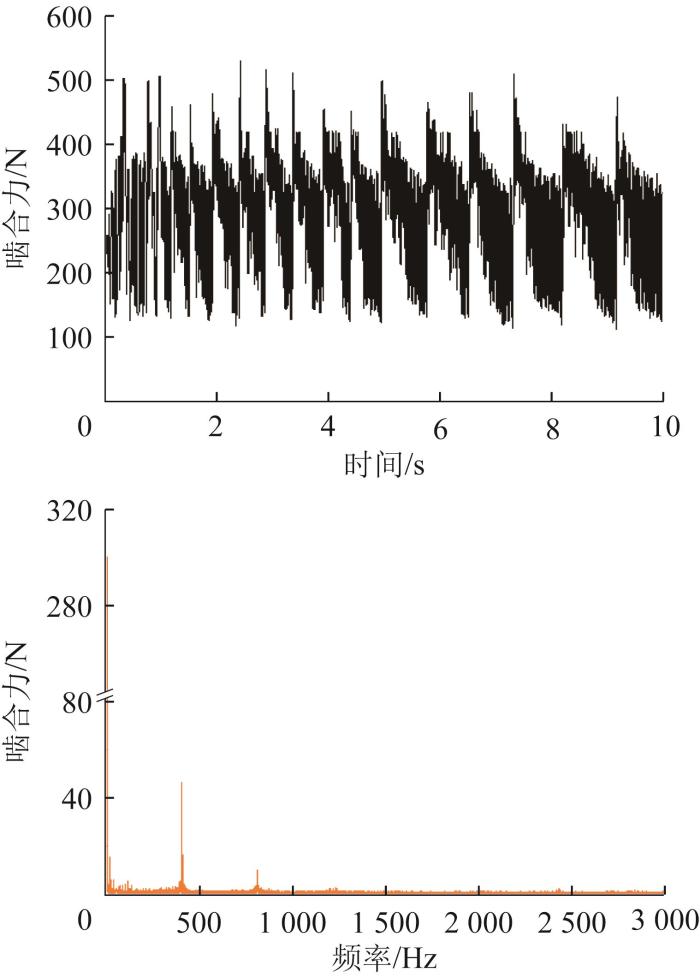
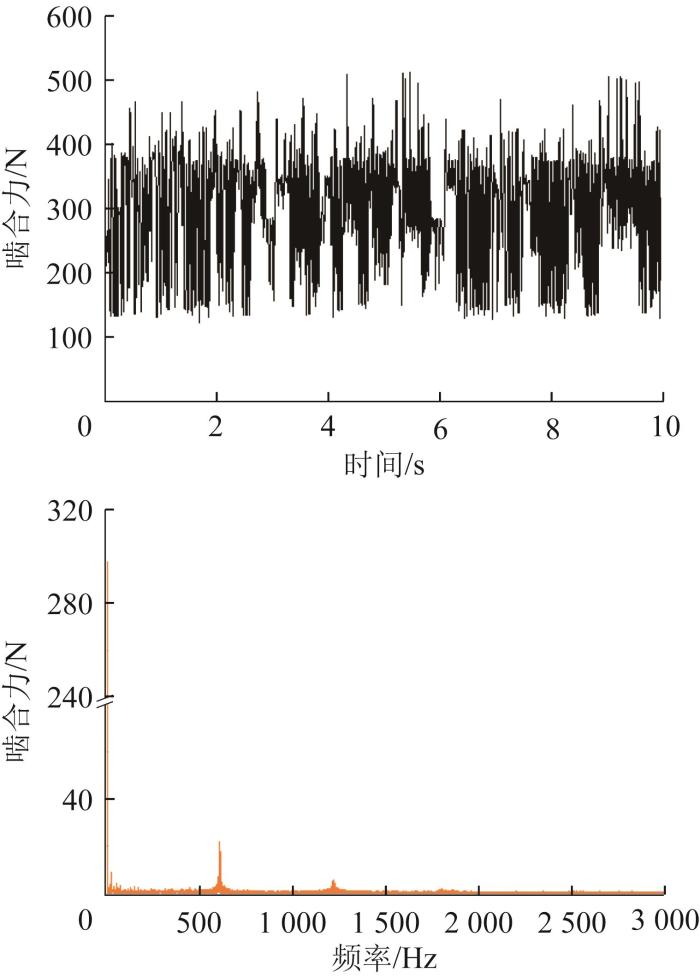
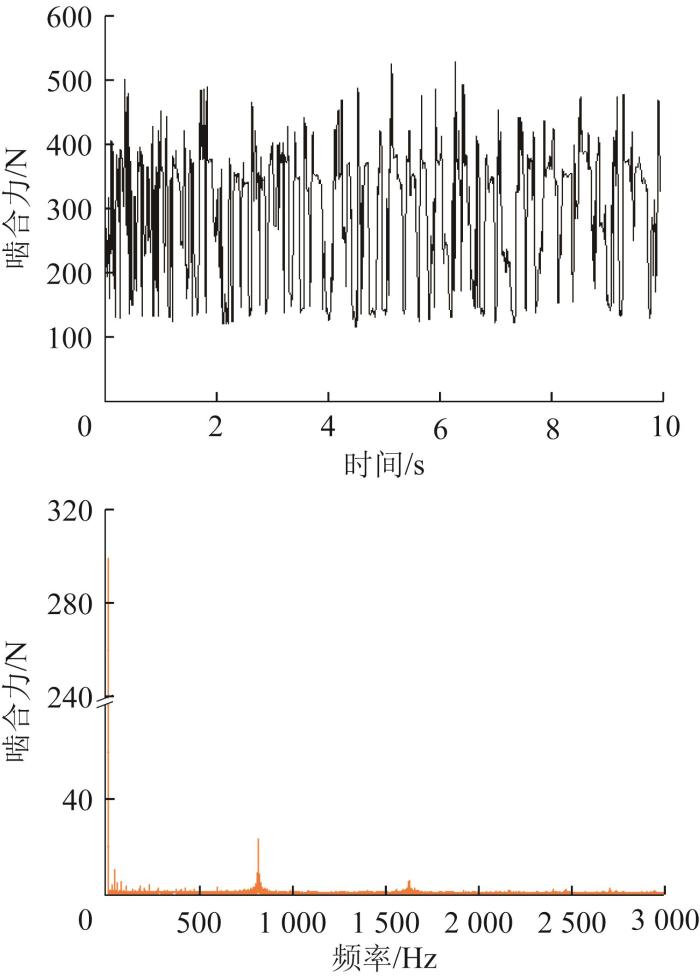
在差速行星减速器运行过程中,由于各个行星轮均匀分布,其啮合状态具有对称性,任意一个行星轮与齿圈的啮合过程均能表征整体的啮合特性。因此,本文仅选取一对行星轮-齿圈啮合副开展仿真分析。为探究不同转速工况下的齿轮啮合特性,分别在1 000、1 500、2 000 r/min三种输入转速条件下进行仿真分析。不同转速下行星轮-齿圈的啮合力分别如图6 至图8 所示。
图6
图6
行星轮-齿圈啮合力时域图及频谱图( n i =1 000 r/min
Fig.6
Time-domain and spectrum diagrams of meshing force between planetary gear and ring gear (n i =1 000 r/min)
图7
图7
行星轮-齿圈啮合力时域图及频谱图( n i =1 500 r/min
Fig.7
Time-domain and spectrum diagrams of meshing force between planetary gear and ring gear (n i =1 500 r/min)
图8
图8
行星轮-齿圈啮合力时域图及频谱图( n i =2 000 r/min
Fig.8
Time-domain and spectrum diagrams of meshing force between planetary gear and ring gear (n i =2 000 r/min)
结合图6 至图8 所示的啮合力时域曲线可知,随着输入转速的提高,时域曲线的波动程度有所升高。这充分表明,在差速行星减速器高速运行过程中,齿轮啮合产生的动态冲击效应持续增强,并进一步加剧系统振动。结合频域曲线可知,啮合力峰值主要集中在啮合频率及其倍频附近。这一特征与齿轮传动系统正常啮合时的规律完全相符。此外,在啮合频率周围还存在一些微弱边频带,这一现象与齿轮传动系统存在的非线性因素具有一定联系。
3 差速行星减速器振动试验
3.1 振动试验方案
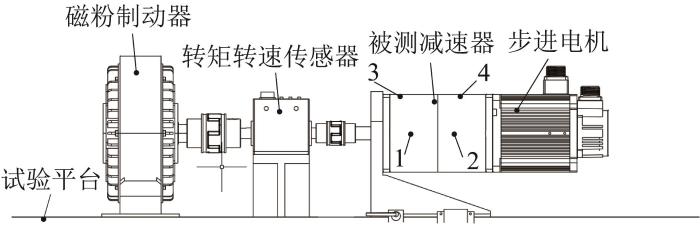
为测试差速行星减速器的振动响应并进一步揭示其振动机理,搭建了图9 所示的振动试验台。其中,电机驱动器控制步进电机的输入功率,为整个试验台提供稳定的动力输入;被测减速器与转矩转速传感器通过联轴器连接,传感器采集转速及转矩数据,用于监测减速器的运行状态。在试验过程中,利用磁粉制动器施加负载转矩,以模拟减速器的实际运行工况;同时,通过三轴振动加速度传感器采集对应的振动信号。针对采集得到的振动信号,先进行稳态运行工况数据选取及无效数据剔除处理,再通过傅里叶变换得到对应的频域响应曲线,从而为后续的动态特性分析提供数据支撑。
图9
图9
差速行星减速器振动试验台
Fig.9
Vibration test bench for differential planetary reducer
在测试过程中,在差速行星减速器外部布置4个测点。其中,测点1、2沿减速器圆周方向分布在正前方区域,测点3、4布置在圆周方向正上方区域。测点具体位置如图10 所示。
图10
图10
振动加速度传感器测点位置
Fig.10
Measurement point position of vibration acceleration sensors
3.2 振动响应测试结果
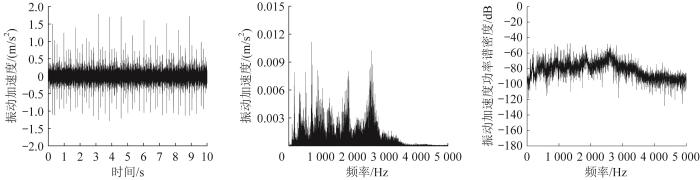
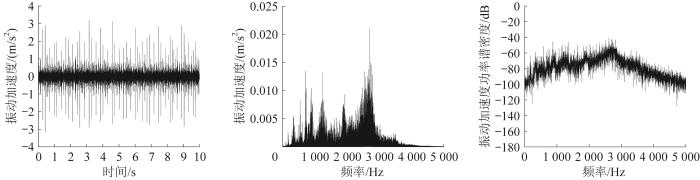
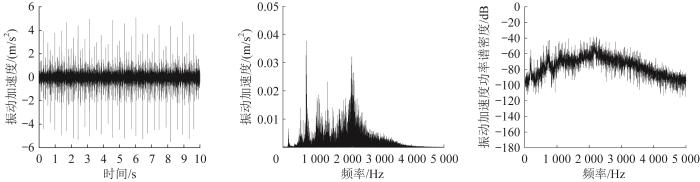
在转速为1 000 r/min、负载转矩为25 N·m的工况下,利用振动加速度传感器采集测点1的X 、Y 、Z 向振动信号,并对该时域信号进行处理,得到对应的频谱图和功率谱密度曲线。其余测点的振动响应规律与测点1基本一致,限于篇幅,本文不作具体分析。测点1的X 、Y 、Z 向振动响应分别如图11 至图13 所示。
图11
图11
测点1 的 X
Fig.11
X -direction vibration response of measurement point 1
图12
图12
测点1 的 Y
Fig.12
Y -direction vibration response of measurement point 1
图13
图13
测点1 的 Z
Fig.13
Z -direction vibration response of measurement point 1
通过计算测点1振动信号的时域特征值,得到各方向振动强度:X 向振动加速度的RMS(root mean square,均方根)为0.10 m/s2 ,Y 向振动加速度的RMS为0.17 m/s2 ,Z 向振动加速度的RMS为0.26 m/s2 。从振动强度来看,被测减速器整体的振动幅值处于较低水平,表明该减速器的动态运行稳定性较好。同时,可观察到该减速器的Z 向振动强度显著高于X 、Y 向。
结合频谱图进一步分析,可得振动加速度峰值主要集中于185、420、790、1 261、2 600 Hz附近。虽然有部分峰值对应的频率存在一定误差,但大致与啮合频率及其倍频吻合。通过观察振动加速度的功率谱密度曲线发现,各向振动加速度的功率谱密度变化趋势基本一致,Z 向幅值最大,这一结果与时域特征相互印证,验证了Z 向振动为该减速器的主要振动。
4 差速行星减速器结构优化设计
传统行星减速器的设计大多基于机械设计手册,对于齿轮传动系统振动的控制,难以量化及实施。前文已对差速行星减速器的传动机理及动态振动响应进行了研究,并明确了各设计参数与系统振动之间的联系。在此基础上,对差速行星减速器进行多目标优化设计,为实现减速器减振以及绿色化、轻量化设计提供切实可行的理论支撑与技术方案。
4.1 设计变量及目标函数
在保证差速行星减速器体积不发生较大改变的前提下,选取其齿轮传动系统的关键设计参数作为优化变量,包括各齿轮的齿数以及2个齿圈的宽度,共8个设计变量,用矩阵形式可表示为:
X = [ z 1 z 2 z 3 z 4 z 5 z 6 b 1 b 2 ] T (3)
式中: X b 1 、b 2 为2个齿圈的宽度。
为提升差速行星减速器的综合性能,根据其初始设计方案,建立以下3个目标函数。
1)振动加速度最小。为实现减速器的减振设计,对其齿轮传动系统的设计参数进行优化,以达到抑制振动的目的。由于振动加速度的求解较为复杂,可在满足其他2个目标函数的情况下,选择减振效果最佳的解,从而简化优化模型。振动加速度目标函数可表示为:
m i n g 1 ( X ) = m i n ∑ j = 1 13 a R M S , j (4)
式中:a RMS, j j 的振动加速度RMS。
2)质量最小。当齿轮材料选定时,质量最小即表示体积最小。为了方便计算,常采用分度圆尺寸计算齿轮体积,但这样会忽略齿高系数及变位系数等对体积的影响,甚至会导致某些约束条件在求解优化问题时失效。因此,本文选用齿顶圆直径来计算太阳轮(齿轮1、4)的体积,选用齿顶圆直径及齿根圆直径来计算行星轮(齿轮2、5)和齿圈(齿轮3、6)的体积。质量目标函数可表示为:
m i n g 2 ( X ) = m i n 1 4 π ∑ e = 1 2 d a s e 2 + ( d a p e 2 - d f p e 2 ) + d f r e 2 - d a r e 2 b (5)
式中:d as1 、d ap1 、d ar1 分别为齿轮1、2、3的齿顶圆直径,d fp1 、d fr1 分别为齿轮2、3的齿根圆直径,d as2 、d ap2 、d ar2 分别为齿轮4、5、6的齿顶圆直径,d fp2 、d fr2 分别为齿轮5、6的齿根圆直径。
3)传动效率最高。运行能耗是减速器设计中需要优先考虑的核心因素,同时也是评估其传动性能的重要指标。因此,传动效率也是优化目标的重要组成部分。传动效率目标函数可表示为:
m a x g 3 ( X ) = m a x η 1 η 2 (6)
η 1 = 1 - π 2 ⋅ z 3 z 1 + z 3 ⋅ μ 1 N 1 ε s p ( 1 ) 1 z 1 + 1 z 2 + ε r p ( 1 ) 1 z 2 - 1 z 3 η 2 = 1 - π 2 ⋅ z 6 z 4 + z 6 ⋅ μ 2 N 2 ε s p ( 2 ) 1 z 4 + 1 z 5 + ε r p ( 2 ) 1 z 5 - 1 z 6 k
式中:η 1 、η 2 分别为定轴轮系和差动轮系的传动效率,μ 1 、μ 2 分别为定轴轮系和差动轮系的啮合摩擦系数,N 1 、N 2 分别为齿轮2和齿轮4的数量,ε s p ( 1 ) ε r p ( 1 ) ε s p ( 2 ) ε r p ( 2 ) k 为差动轮系的能量损耗修正系数。
4.2 约束条件
在差速行星减速器优化问题中,首先要考虑的是传动比,而后基于传动比对各齿轮的齿数进行分配。综上,需要考虑以下约束条件。
大传动比是差速行星减速器的核心特征,考虑到优化过程中可能会导致传动比减小,为匹配实际工况,需对减速器的传动比进行约束:
i C n - i C i C ≤ 0.1 (7)
中心距是差速行星减速器结构设计的核心参数。为保证各齿轮精准啮合和避免运动干涉,需对中心距进行约束。中心距由齿数和模数共同决定,鉴于各齿轮的模数均相同,中心距约束可表示为:
z 1 + 2 z 2 = z 3 z 4 + 2 z 5 = z 6 (8)
在差速行星减速器中,为了保证各行星轮能够正确装配,设置如下装配约束:
z 1 + z 3 3 = N z 4 + z 6 4 = N (9)
在差速行星减速器中,为了保证相邻行星轮互不干涉,设置如下邻接约束:
r a p 1 - a 1 s i n ( π / 3 ) ≤ 0 r a p 2 - a 2 s i n ( π / 4 ) ≤ 0 (10)
式中:r ap1 为齿轮2的齿顶圆半径,a 1 为齿轮1与齿轮2的中心距,r ap2 为齿轮5的齿顶圆半径,a 2 为齿轮4与齿轮5的中心距。
在齿轮加工过程中,为了防止齿轮根切,对其最小齿数有一定要求;同时,须保证齿数为整数。在满足传动比约束条件的前提下,各齿轮的齿数约束条件如下:
17 ≤ z 1 ≤ 48 20 ≤ z 2 ≤ 66 80 ≤ z 3 ≤ 120 17 ≤ z 4 ≤ 48 20 ≤ z 5 ≤ 60 70 ≤ z 6 ≤ 120 (11)
在差速行星减速器结构设计中,多个行星轮均匀承载是设计关键,而齿宽会影响齿轮载荷分布的均匀性,甚至导致振动以及传动不稳定。在一定范围内,齿宽增大可以提高齿轮强度,但当齿宽超过临界值后,会导致齿轮偏载严重以及制造和安装成本增加。因此,在实际设计中,设置如下宽径比约束:
0.2 ≤ b 1 d p 1 ≤ 1.3 0.2 ≤ b 2 d p 2 ≤ 1.3 (12)
式中:d p1 为齿轮2的分度圆直径,d p2 为齿轮5的分度圆直径。
在齿轮啮合过程中,为降低啮合冲击引起的系统振动,各齿轮的重合度应满足以下约束条件:
ε s p ( 1 ) ≥ 1.2 ε r p ( 1 ) ≥ 1.2 ε s p ( 2 ) ≥ 1.2 ε r p ( 2 ) ≥ 1.2 (13)
在相同工况下,优化设计后齿轮的齿面接触强度以及齿根弯曲强度也应符合强度要求。在差速行星减速器中,各齿轮的齿面接触强度及齿根弯曲强度的约束条件可表示为:
σ H = 2 K T 1 b d 1 2 · u + 1 u · Z H Z E Z ε ≤ [ σ H ] σ F = 2 K T 1 b d 1 m · Y F a Y S a Y ε ≤ [ σ F ] (14)
式中:σ H 、σ F 分别为齿面接触应力和齿根弯曲应力;T 1 为额定负载下主动轮的转矩;u σ H ]、[σ F ]分别为许用齿面接触应力和许用齿根弯曲应力;K 为综合载荷系数;d 1 为小齿轮分度圆直径;m 为齿轮模数;Z H 、Z E 、Zε 、Y Fa 、Y sa 、Yε 等参数为机械设计领域的标准化参数,篇幅有限,在此不再逐一赘述,可参考文献[7 ]。
4.3 优化模型和优化结果
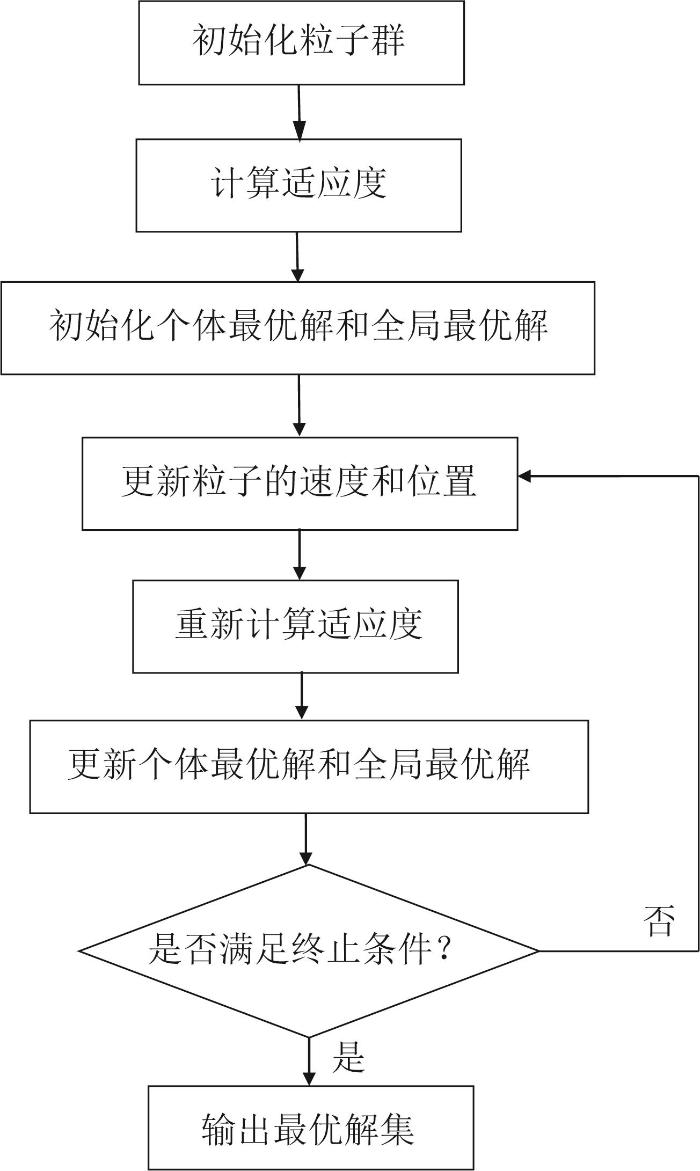
差速行星减速器的优化问题属于多目标优化问题,这类问题通常需要同时兼顾多个相互关联的目标,但各目标间可能存在某项性能提升导致另一性能下降的冲突关系。因此,本文采用多目标粒子群优化算法进行寻优,以适配多目标优化的求解需求。该算法基于传统粒子群优化算法改进而来。与单目标优化存在单一的全局最优解不同,因目标间的冲突性,多目标优化不存在同时使所有目标都达到最优的单一解,而是存在一组最优解集合。多目标粒子群优化算法的寻优流程如图14 所示。
图14
图14
多目标粒子群优化算法寻优流程
Fig.14
Optimization process of multi-objective particle swarm optimization algorithm
在最优解集合中,每个最优解代表一种在不同优化目标之间达到平衡的情况,即无法在不牺牲其他目标的情况下进一步优化某个目标。因此,结合差速行星减速器的实际应用需求,为每个优化目标赋予权重[21 ] 。考虑到齿轮传动系统稳定运行的核心需求,将振动加速度的权重设为最高;绿色化目标与运行能耗和经济性有关,将传动效率的权重设为中等水平;轻量化目标的优先级较低,故对质量赋予较小权重。经加权处理后,该减速器的目标函数可表示为:
g ( X ) = 1 2 g 1 ( X ) + 1 5 g 2 ( X ) + 3 10 1 - g 3 ( X ) (15)
通过优化求解得到最优解集合,并利用式(15)进行计算,选取目标函数值最小的解作为最优解。优化前后差速行星减速器的设计参数如表5 所示。
通过进一步计算分析可得,优化后差速行星减速器的性能显著提升,大部分构件不仅质量有所减小,而且振动加速度明显下降。具体而言,减速器各构件的振动加速度RMS平均降低了23.4%,有效削弱了齿轮传动系统的振动强度;同时,减速器的传动效率提升了0.52%,总质量减小了4.2%,能量传递效率有所提高,且轻量化效果显著。
5 结 论
1)针对工程领域对大传动比的实际需求,设计了一种新型差速行星减速器。该设计为解决高速重载工况下难以兼顾大传动比和结构紧凑性的工程难题提供了切实可行的技术方案,可适配相关工程场景的应用需求。
2)利用ADAMS软件建立了差速行星减速器的多体动力学仿真模型,通过仿真得到的传动比与理论计算结果的相对误差仅为1.7%,验证了该减速器传动机理的可行性。同时,通过仿真得到不同转速工况下齿轮啮合力呈周期性变化,这对齿轮啮合冲击研究具有一定的指导意义。
3)通过搭建振动试验台对差速行星减速器开展了振动测试。结果显示,该减速器在运行过程中无明显异常振动,各向振动加速度RMS的最大值为0.26 m/s2 ,振动幅值较低,表明其动态性能良好,可满足实际工况的运行需求。测试结果为差速行星减速器的工程应用提供了可靠的数据支撑。
4)以减振化、绿色化及轻量化为优化目标,采用多目标粒子群优化算法对差速行星减速器优化模型进行了求解。结果表明,优化后该减速器的振动加速度RMS降低了23.4%,传动效率提高了0.52%,总质量减小了4.2%,综合优化效果良好。然而,需要指出的是,该优化方案处于理论研究阶段,存在一定局限性。后续研究将重点围绕优化算法改进以及工程验证展开,旨在为差速行星减速器的工业化应用提供更坚实的技术支撑。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.215
参考文献
View Option
[1]
黄兴 , 何文杰 , 符远翔 工业机器人精密减速器综述
[J]. 机床与液压 , 2015 , 43 (13 ): 1 -6 .
[本文引用: 1]
HUANG X HE W J FU Y X Summary of precision speed reducer of industrial robots
[J]. Machine Tool & Hydraulics , 2015 , 43 (13 ): 1 -6 .
[本文引用: 1]
[2]
关通 , 徐宏海 , 谢雄伟 , 等 高精密RV减速器传动效率测试与分析
[J]. 机械传动 , 2019 , 43 (5 ): 106 -109 .
GUAN T XU H H XIE X W et al Transmission efficiency test and analysis of high-precision RV reducer
[J]. Journal of Mechanical Transmission , 2019 , 43 (5 ): 106 -109 .
[3]
向珍琳 , 李霆 , 杨林 , 等 谐波减速器研究现状及问题研究
[J]. 机械传动 , 2020 , 44 (7 ): 151 -162 .
XIANG Z L LI T YANG L et al Study on status and problem research of harmonic gear drive
[J]. Journal of Mechanical Transmission , 2020 , 44 (7 ): 151 -162 .
[5]
林文钊 , 黄方平 , 陈俊华 , 等 高精度行星减速器输出轴模态分析
[J]. 机电工程 , 2025 , 42 (8 ): 1413 -1427 .
[本文引用: 1]
LIN W Z HUANG F P CHEN J H et al Modal analysis of output shaft of high precision planetary gear reducer under meshing states
[J]. Journal of Mechanical & Electrical Engineering , 2025 , 42 (8 ): 1413 -1427 .
[本文引用: 1]
[6]
[本文引用: 1]
LIU J XIAO Z M ZHANG L L et al Transmission accuracy reliability analysis and parameter optimization of RV reducer considering cycloid gear wear
[J]. Chinese Journal of Engineering Design , 2022 , 29 (6 ): 739 -747 .
DOI:10.3785/j.issn.1006-754X.2022.00.081
[本文引用: 1]
[8]
张建润 , 伍健伟 , 傅琪迪 , 等 高功率密度行星减速器设计的关键核心技术综述
[J]. 机械制造与自动化 , 2020 , 49 (4 ): 1 -4 .
[本文引用: 1]
ZHANG J R WU J W FU Q D et al Crucial technologies in design of high power density planetary reducer
[J]. Machine Building & Automation , 2020 , 49 (4 ): 1 -4 .
[本文引用: 1]
[9]
朱林 , 朱晖晖 一种大传动比减速器结构设计与运动分析
[J]. 机械设计 , 2018 , 35 (12 ): 77 -81 .
[本文引用: 2]
ZHU L ZHU H H Physical design and kinematic analysis of the reducer with a large transmission ratio
[J]. Journal of Machine Design , 2018 , 35 (12 ): 77 -81 .
[本文引用: 2]
[10]
乔雪涛 , 陈鹏威 , 刘锋卓 , 等 工业机器人用类摆线行星减速器的研制与分析
[J]. 机械传动 , 2025 , 49 (8 ): 111 -121 .
[本文引用: 2]
QIAO X T CHEN P W LIU F Z et al Development and analysis of abnormal cycloidal planetary reducers for industrial robots
[J]. Journal of Mechanical Transmission , 2025 , 49 (8 ): 111 -121 .
[本文引用: 2]
[11]
肖正明 , 秦大同 , 武文辉 , 等 土压平衡盾构机行星减速器动态性能测试与分析
[J]. 振动与冲击 , 2012 , 31 (9 ): 154 -159 .
[本文引用: 1]
XIAO Z M QIN D T WU W H et al Testing and analysis on dynamic performance of planetary gearbox in EPB shield tunnelling machine
[J]. Journal of Vibration and Shock , 2012 , 31 (9 ): 154 -159 .
[本文引用: 1]
[12]
HUANG C WANG J X XIAO K et al Dynamic characteristics analysis and experimental research on a new type planetary gear apparatus with small tooth number difference
[J]. Journal of Mechanical Science and Technology , 2013 , 27 (5 ): 1233 -1244 .
[本文引用: 1]
[13]
程言丽 , 肖正明 , 王旭 直齿圆柱齿轮动力学特性分析与ADAMS仿真研究
[J]. 机械强度 , 2016 , 38 (4 ): 667 -674 .
[本文引用: 2]
CHENG Y L XIAO Z M WANG X Investigation on dynamic characteristic of cylinder gears and simulation based on ADAMS
[J]. Journal of Mechanical Strength , 2016 , 38 (4 ): 667 -674 .
[本文引用: 2]
[14]
李亦轩 , 王巍 , 张明 冲击载荷作用下减速器行星齿轮传动系统振动特性研究
[J]. 机床与液压 , 2018 , 46 (23 ): 130 -133 .
[本文引用: 2]
LI Y X WANG W ZHANG M Research on vibration characteristics of transmission system of reducer planetary gear under impact load
[J]. Machine Tool & Hydraulics , 2018 , 46 (23 ): 130 -133 .
[本文引用: 2]
[15]
崔玥 , 田韶鹏 , 邹琳 , 等 某电驱动桥主减速器振动噪声特性仿真与试验研究
[J]. 机械传动 , 2023 , 47 (11 ): 86 -93 .
[本文引用: 1]
CUI Y TIAN S P ZOU L et al Simulation and experimental study on vibration and noise characteristics of the main reducer of an electric drive axle
[J]. Journal of Mechanical Transmission , 2023 , 47 (11 ): 86 -93 .
[本文引用: 1]
[16]
ZHOU J X SUN W L CAO L Vibration and noise characteristics of a gear reducer under different operation conditions
[J]. Journal of Low Frequency Noise, Vibration and Active Control , 2019 , 38 (2 ): 574 -591 .
[本文引用: 1]
[17]
杨红波 , 史文库 , 陈志勇 , 等 基于某二级减速齿轮系统的齿面修形优化
[J]. 吉林大学学报(工学版) , 2022 , 52 (7 ): 1541 -1551 .
[本文引用: 1]
YANG H B SHI W K CHEN Z Y et al Optimization of tooth surface modification based on a two-stage reduction gear system
[J]. Journal of Jilin University (Engineering and Technology Edition) , 2022 , 52 (7 ): 1541 -1551 .
[本文引用: 1]
[18]
徐航 , 刘伟强 , 崔江红 , 等 精密行星减速器优化设计及仿真分析
[J]. 机床与液压 , 2023 , 51 (15 ): 193 -197 .
[本文引用: 1]
XU H LIU W Q CUI J H et al Optimization design and simulation analysis of precision planetary reducer
[J]. Machine Tool & Hydraulics , 2023 , 51 (15 ): 193 -197 .
[本文引用: 1]
[19]
LIN W Z CHANG D D LI H et al Dynamic characteristics analysis and optimization design of two-stage helix planetary reducer for robots
[J]. Machines , 2025 , 13 (3 ): 245 .
[本文引用: 1]
[20]
张争艳 , 陈定方 , 沈文胜 , 等 基于混合非线性规划的混合式齿轮减速器离散优化设计
[J]. 中国机械工程 , 2011 , 22 (23 ): 2778 -2783 .
[本文引用: 1]
ZHANG Z Y CHEN D F SHEN W S et al Discrete optimization of compound gear box based on mixed nonlinear programming
[J]. China Mechanical Engineering , 2011 , 22 (23 ): 2778 -2783 .
[本文引用: 1]
[21]
徐向阳 , 韩洵 , 艾星 , 等 改进粒子群算法的行星齿轮系统多目标优化研究
[J]. 机械科学与技术 , 2018 , 37 (9 ): 1352 -1358 .
[本文引用: 2]
XU X Y HAN X AI X et al Research on multi-objective optimization of planetary gear system with improved particle swarm optimization
[J]. Mechanical Science and Technology for Aerospace Engineering , 2018 , 37 (9 ): 1352 -1358 .
[本文引用: 2]
[22]
姚新兆 矿用掘进机减速器动态特性分析与优化设计
[J]. 煤炭技术 , 2022 , 41 (12 ): 228 -231 .
[本文引用: 1]
YAO X Z Dynamic characteristics analysis and optimal design of mine roadheader decelerator
[J]. Coal Technology , 2022 , 41 (12 ): 228 -231 .
[本文引用: 1]
工业机器人精密减速器综述
1
2015
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
工业机器人精密减速器综述
1
2015
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
高精度行星减速器输出轴模态分析
1
2025
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
高精度行星减速器输出轴模态分析
1
2025
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
考虑摆线轮磨损的RV减速器传动精度可靠性分析与参数优化
1
2022
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
考虑摆线轮磨损的RV减速器传动精度可靠性分析与参数优化
1
2022
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
2
2014
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
... specific-use="noneIndent">式中:σ H 、σ F 分别为齿面接触应力和齿根弯曲应力;T 1 为额定负载下主动轮的转矩;u σ H ]、[σ F ]分别为许用齿面接触应力和许用齿根弯曲应力;K 为综合载荷系数;d 1 为小齿轮分度圆直径;m 为齿轮模数;Z H 、Z E 、Zε 、Y Fa 、Y sa 、Yε 等参数为机械设计领域的标准化参数,篇幅有限,在此不再逐一赘述,可参考文献[7 ]. ...
2
2014
... 在现代机械传动领域,行星减速器凭借其紧凑的结构和高效的传动性能,被广泛应用于航空航天器、新能源汽车、工业机器人等高端装备.近年来,谐波减速器、RV(rotary vector,旋转矢量)减速器等高性能减速器逐渐崭露头角,其在传动效率、精度和可靠性等方面取得了显著突破[1 -5 ] .这些减速器通过优化齿形设计和采用新型材料,进一步提升了传动系统的动态响应能力和使用寿命,为现代工业装备性能的持续提升提供了有力支撑[6 -7 ] . ...
... specific-use="noneIndent">式中:σ H 、σ F 分别为齿面接触应力和齿根弯曲应力;T 1 为额定负载下主动轮的转矩;u σ H ]、[σ F ]分别为许用齿面接触应力和许用齿根弯曲应力;K 为综合载荷系数;d 1 为小齿轮分度圆直径;m 为齿轮模数;Z H 、Z E 、Zε 、Y Fa 、Y sa 、Yε 等参数为机械设计领域的标准化参数,篇幅有限,在此不再逐一赘述,可参考文献[7 ]. ...
高功率密度行星减速器设计的关键核心技术综述
1
2020
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
高功率密度行星减速器设计的关键核心技术综述
1
2020
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
一种大传动比减速器结构设计与运动分析
2
2018
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
... 行星减速器的传动原理为:输入动力通过各级行星齿轮副的啮合传动,逐步实现输出转速降低的转换[9 ] .对于图1 (a)所示的传统行星减速器,当输入轴的转速为n i n o i X 的计算式如下: ...
一种大传动比减速器结构设计与运动分析
2
2018
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
... 行星减速器的传动原理为:输入动力通过各级行星齿轮副的啮合传动,逐步实现输出转速降低的转换[9 ] .对于图1 (a)所示的传统行星减速器,当输入轴的转速为n i n o i X 的计算式如下: ...
工业机器人用类摆线行星减速器的研制与分析
2
2025
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
... 为验证上述初步设计的差速行星减速器传动机理的可行性,开展多体动力学仿真分析.首先,采用SolidWorks软件对差速行星减速器进行三维建模.为了提高仿真分析的效率,基于“保留核心动力学构件、排除其余无关构件”的原则,对减速器三维模型进行适当简化[10 ] .简化处理后减速器模型主要包含输入轴、定轴轮系(齿轮1、2、3)、输入端行星架、差动轮系(齿轮4、5、6)及输出端行星架等构件.然后,将简化后的模型以Parasolid格式导入ADAMS软件,用于构建多体动力学仿真模型.最后,根据差速行星减速器的工作原理,对多体动力学仿真模型设置合适的约束条件与接触关系[13 ] . ...
工业机器人用类摆线行星减速器的研制与分析
2
2025
... 随着减速器技术的持续迭代与高端装备应用需求的不断升级,传统行星减速器在特定工况下的局限性逐渐凸显,这已成为其适配高新领域需求的主要技术瓶颈[8 ] .为此,许多学者提出了差异化的减速器结构设计方案.例如:朱林等[9 ] 针对传统行星减速器的缺陷,设计了一种新型圆锥齿轮减速器,并通过虚拟仿真验证了其传动原理的可行性;乔雪涛等[10 ] 提出了一种类摆线行星减速器设计方案,性能测试结果显示,该减速器的传动性能良好.尽管近年来涌现的新型减速器在结构创新方面取得了显著进展,但在动态性能提升方面仍存在明显不足.此外,现有研究大多聚焦于减速器传动原理验证,缺乏对实际工况下减速器振动响应特性的分析,这显著制约了新型减速器在高端装备领域的工程应用. ...
... 为验证上述初步设计的差速行星减速器传动机理的可行性,开展多体动力学仿真分析.首先,采用SolidWorks软件对差速行星减速器进行三维建模.为了提高仿真分析的效率,基于“保留核心动力学构件、排除其余无关构件”的原则,对减速器三维模型进行适当简化[10 ] .简化处理后减速器模型主要包含输入轴、定轴轮系(齿轮1、2、3)、输入端行星架、差动轮系(齿轮4、5、6)及输出端行星架等构件.然后,将简化后的模型以Parasolid格式导入ADAMS软件,用于构建多体动力学仿真模型.最后,根据差速行星减速器的工作原理,对多体动力学仿真模型设置合适的约束条件与接触关系[13 ] . ...
土压平衡盾构机行星减速器动态性能测试与分析
1
2012
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
土压平衡盾构机行星减速器动态性能测试与分析
1
2012
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
Dynamic characteristics analysis and experimental research on a new type planetary gear apparatus with small tooth number difference
1
2013
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
直齿圆柱齿轮动力学特性分析与ADAMS仿真研究
2
2016
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
... 为验证上述初步设计的差速行星减速器传动机理的可行性,开展多体动力学仿真分析.首先,采用SolidWorks软件对差速行星减速器进行三维建模.为了提高仿真分析的效率,基于“保留核心动力学构件、排除其余无关构件”的原则,对减速器三维模型进行适当简化[10 ] .简化处理后减速器模型主要包含输入轴、定轴轮系(齿轮1、2、3)、输入端行星架、差动轮系(齿轮4、5、6)及输出端行星架等构件.然后,将简化后的模型以Parasolid格式导入ADAMS软件,用于构建多体动力学仿真模型.最后,根据差速行星减速器的工作原理,对多体动力学仿真模型设置合适的约束条件与接触关系[13 ] . ...
直齿圆柱齿轮动力学特性分析与ADAMS仿真研究
2
2016
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
... 为验证上述初步设计的差速行星减速器传动机理的可行性,开展多体动力学仿真分析.首先,采用SolidWorks软件对差速行星减速器进行三维建模.为了提高仿真分析的效率,基于“保留核心动力学构件、排除其余无关构件”的原则,对减速器三维模型进行适当简化[10 ] .简化处理后减速器模型主要包含输入轴、定轴轮系(齿轮1、2、3)、输入端行星架、差动轮系(齿轮4、5、6)及输出端行星架等构件.然后,将简化后的模型以Parasolid格式导入ADAMS软件,用于构建多体动力学仿真模型.最后,根据差速行星减速器的工作原理,对多体动力学仿真模型设置合适的约束条件与接触关系[13 ] . ...
冲击载荷作用下减速器行星齿轮传动系统振动特性研究
2
2018
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
... 在行星减速器动态传递输入转矩的过程中,由于各齿轮副间啮合运动的周期性,其会产生周期性的啮合力.该啮合力作为齿轮传动系统的内部激励源,会引发系统振动响应.齿轮间的动态啮合力与齿轮传动系统振动响应在本质上是激励与动态响应的关系.因此,研究齿轮间的啮合力不仅可验证行星减速器的运行稳定性,还能揭示其振动机理[14 ] . ...
冲击载荷作用下减速器行星齿轮传动系统振动特性研究
2
2018
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
... 在行星减速器动态传递输入转矩的过程中,由于各齿轮副间啮合运动的周期性,其会产生周期性的啮合力.该啮合力作为齿轮传动系统的内部激励源,会引发系统振动响应.齿轮间的动态啮合力与齿轮传动系统振动响应在本质上是激励与动态响应的关系.因此,研究齿轮间的啮合力不仅可验证行星减速器的运行稳定性,还能揭示其振动机理[14 ] . ...
某电驱动桥主减速器振动噪声特性仿真与试验研究
1
2023
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
某电驱动桥主减速器振动噪声特性仿真与试验研究
1
2023
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
Vibration and noise characteristics of a gear reducer under different operation conditions
1
2019
... 针对减速器的动态性能,国内外学者开展了大量研究.肖正明等[11 ] 针对土压平衡盾构机的三级行星减速器,开展了振动测试及声压测试,结果表明,该减速器的动态性能满足设计标准.Huang等[12 ] 针对少齿差内啮合行星减速器开展了仿真分析和实验验证,为该减速器的动态优化设计提供了数据支撑.程言丽等[13 ] 运用ADAMS软件对直齿圆柱齿轮进行了虚拟仿真,得到的动态响应结果与实测数据一致.李亦轩等[14 ] 运用动力学仿真软件对冲击载荷下减速器行星齿轮传动机构的动态特性进行了分析.崔玥等[15 ] 利用ADAMS软件对某电驱动桥主减速器进行了扫频分析,研究了该减速器的振动特性.Zhou等[16 ] 研究了不同工况下齿轮减速器的动态特性,结果表明:在轻载工况下,减速器的振动响应呈非线性变化;在重载工况下,减速器的振动响应呈线性变化. ...
基于某二级减速齿轮系统的齿面修形优化
1
2022
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
基于某二级减速齿轮系统的齿面修形优化
1
2022
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
精密行星减速器优化设计及仿真分析
1
2023
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
精密行星减速器优化设计及仿真分析
1
2023
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
Dynamic characteristics analysis and optimization design of two-stage helix planetary reducer for robots
1
2025
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
基于混合非线性规划的混合式齿轮减速器离散优化设计
1
2011
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
基于混合非线性规划的混合式齿轮减速器离散优化设计
1
2011
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
改进粒子群算法的行星齿轮系统多目标优化研究
2
2018
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
... 在最优解集合中,每个最优解代表一种在不同优化目标之间达到平衡的情况,即无法在不牺牲其他目标的情况下进一步优化某个目标.因此,结合差速行星减速器的实际应用需求,为每个优化目标赋予权重[21 ] .考虑到齿轮传动系统稳定运行的核心需求,将振动加速度的权重设为最高;绿色化目标与运行能耗和经济性有关,将传动效率的权重设为中等水平;轻量化目标的优先级较低,故对质量赋予较小权重.经加权处理后,该减速器的目标函数可表示为: ...
改进粒子群算法的行星齿轮系统多目标优化研究
2
2018
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
... 在最优解集合中,每个最优解代表一种在不同优化目标之间达到平衡的情况,即无法在不牺牲其他目标的情况下进一步优化某个目标.因此,结合差速行星减速器的实际应用需求,为每个优化目标赋予权重[21 ] .考虑到齿轮传动系统稳定运行的核心需求,将振动加速度的权重设为最高;绿色化目标与运行能耗和经济性有关,将传动效率的权重设为中等水平;轻量化目标的优先级较低,故对质量赋予较小权重.经加权处理后,该减速器的目标函数可表示为: ...
矿用掘进机减速器动态特性分析与优化设计
1
2022
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...
矿用掘进机减速器动态特性分析与优化设计
1
2022
... 现阶段,齿面修形凭借可精准调控齿轮啮合特性的优势,已成为改善齿轮传动系统综合性能的核心技术手段.杨红波等[17 ] 针对某二级减速齿轮系统振动噪声突出的问题,以齿面修形参数为设计变量,运用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行了参数寻优,结果显示,优化后齿轮啮合传递误差显著降低.徐航等[18 ] 为改善某二级精密行星减速器的啮合应力集中现象,提出了带鼓形螺旋线修形的优化方式,为精密行星减速器的修形设计提供了参考.Lin等[19 ] 对某高精度行星减速器进行了动态特性研究,并对齿轮进行了微观修形优化,结果表明,修形优化有效降低了该减速器的振动幅值.尽管齿面修形在齿轮传动系统性能优化方面成效显著,但若仅考虑齿面微观修形,而不考虑各设计参数的宏观优化,则无法平衡各类性能需求.为此,张争艳等[20 ] 以某三级混合式减速器的体积为优化目标,开展了离散优化设计,为混合式减速器的性能优化提供了参考.徐向阳等[21 ] 以某齿轮箱为研究对象,利用改进的自适应粒子群优化算法对其进行了多目标优化.姚新兆等[22 ] 以提升减速器工作性能和实现结构轻量化为核心目标,开展了减速器动态特性分析与优化设计研究. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}