


轮式移动机器人因其卓越的运动灵活性,已成为当前在室内外环境中广泛应用的移动平台。根据驱动方式,其主要分为差速驱动[3-4]与全向移动两类。林辉等[4]设计了一套面向室外环境的差速轮式移动机器人控制系统,集成电源、驱动、传感、人机交互及通信模块,实现了运动控制、环境感知、定位导航、交互及远程通信等核心功能。刘建猛[5]基于嵌入式实时系统设计移动机器人控制系统,并利用模糊控制算法实现了移动机器人的实时避障功能。袁铭[6]针对楼宇内复杂多场景环境,设计了一种多传感器融合的机器人自主导航系统,结合深度学习算法,提升了机器人的避障、路径规划及地形适应能力。朱青松[7]针对移动机器人在楼宇服务场景中的导航需求,系统研究环境建图与自主导航关键技术,重点解决了复杂楼宇环境下的三维建图、动态障碍物识别与路径规划等问题,显著提升了建图精度和导航稳定性,但机器人的避障策略有待完善。
面向移动机器人路径规划的A*算法改进研究取得了显著进展。赵晓等[8]率先提出启发函数动态调整策略,提升了路径搜索效率。苏畅等[9-10]融合人工势场法,有效解决了传统算法路径转折突兀或动态避障性能不足的问题。何育博等[11-12]通过引入自适应权重机制,显著缩短了路径规划时间。在自动驾驶路径规划中,改进A*算法发挥了关键作用[13],提升了智能车辆的路径规划质量[14]。胡国华等[15]针对无人车的路径规划问题,提出一种改进A*算法,通过引入动态权重和双向搜索策略提升路径搜索效率,并结合障碍物预测机制,增强了无人车在复杂环境下的避障能力。该算法在保证路径最优性的同时显著降低了计算耗时。此外,将改进A*算法与动态窗口法、时间弹性带算法等局部规划算法融合,可进一步克服全局算法在应对动态障碍物时的局限性[16-20]。随着研究的深入,这些先进的路径规划算法正逐步应用于电厂智能巡检等特定业务系统[21]。上述改进方案推动了A*算法在动态环境适应性、路径质量和计算效率等方面的突破,但仍存在问题:仅优化了路径长度和计算时间,未综合考虑路径平滑度和能耗效率,以及缺乏实际机器人平台测试,在大规模环境中的扩展性未得到充分验证。
针对楼宇垃圾桶搬运场景的特殊需求与技术难点,本文开展了系统性的设计与研究。楼宇环境具有走廊狭窄、行人来往频繁、存在多个垃圾投放点等特点,这对机器人的路径规划实时性、运动稳定性及末端定位精度提出了更高的要求。通用移动机器人算法在应对此类负载变化大、需精准作业的场景时,往往在路径平滑性、计算效率和抗干扰能力上存在不足。本文设计了一种集底盘运动、垃圾桶提升和夹持功能于一体的专用机器人本体,并构建了基于机器人操作系统(robot operating system,ROS)与微控制器操作系统(micro controller operating system, μC/OS)的分层控制系统。针对上述环景特点,从优化邻域搜索、改进启发函数、去除冗余节点3个维度对传统A*算法进行系统性改进,使其满足楼宇服务机器人的实际运动约束与作业需求。最终,搭建实物样机,通过功能测试验证了机器人设计的可行性与有效性。
1 结构设计
1.1 需求分析
考虑机器人本体结构、机械传动件及电气元件质量,拟定其自身质量为60 kg,最大装载质量为40 kg。因机器人需在高层住宅等行人环境中工作,为了保障安全并应对突发情况,拟定最大运行速度为0.5 m/s,最大加速度为0.25 m/s2。鉴于其任务对续航要求高,规划续航达到2小时以上。机器人的主要参数见表1。
表1 机器人主要参数
Table 1
| 参数 | 数值 |
|---|---|
| 最大宽度/mm | < 700 |
| 轮直径/mm | > 60 |
| 自身质量/kg | 60 |
| 最大装载质量/kg | 40 |
| 最大运行速度/(m·s-1) | 0.5 |
| 最大加速度/(m·s-2) | 0.25 |
| 续航/h | > 2 |
1.2 各模块设计
在分析设计需求与参数指标后,将机器人整体结构分为底盘运动、提升和夹持3个模块,如图1所示。
图1
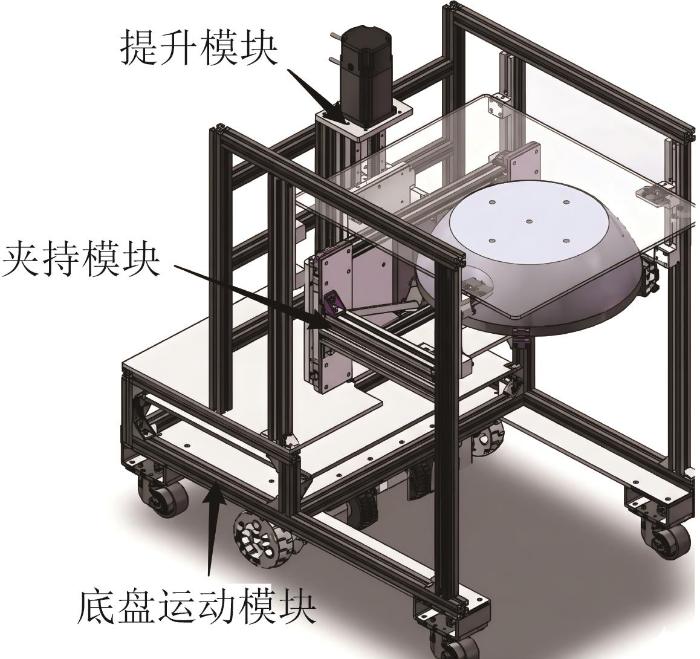
图1
楼宇垃圾桶搬运机器人整体结构
Fig.1
Overall structure of building trash bin handling robot
1.2.1 底盘运动模块
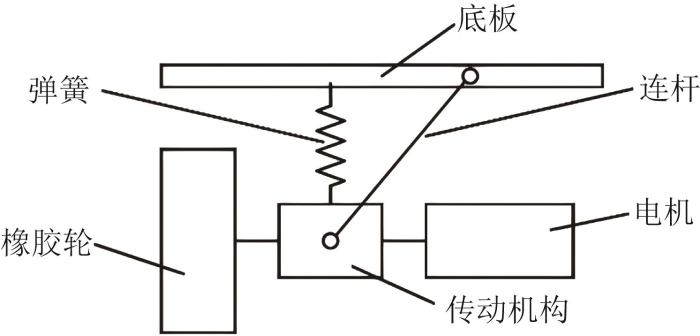
采用两轮差速驱动方案,将2个驱动轮组件安装于底盘中部两侧以控制运动,并辅以万向轮支撑。驱动轮组件结构见图2,其中电机经传动机构驱动橡胶轮转动;传动机构处设有减震弹簧与连杆,弹簧另一端连接底盘底板,以实现减震。
图2
对底盘运动模块的动力部分进行计算,驱动轮组件中电机的最小额定功率Pd, min为:
式中:Kr为底盘运动模块的安全系数,Nq为驱动轮数量,m1为机器人自身质量,m2为最大装载质量,μ1为地面与橡胶轮的摩擦系数,amax为最大加速度,vmax为最大运行速度,ηd为驱动轮组件的综合效率。
取Kr=1.2,μ1=0.1,ηd=0.9,由
式中:Nm为底盘的驱动轮与万向轮总数;r为驱动轮半径,取r=62.5 mm。
由
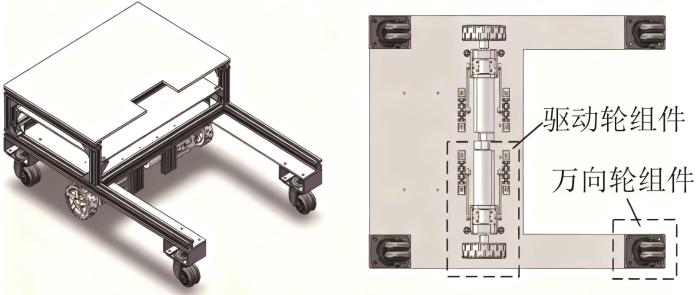
根据计算得到的电机性能参数,选用直流行星减速电机CHP-42GP-BLDC4260。最后,搭建底盘运动模块,整体设计如图3所示。
图3
1.2.2 夹持模块
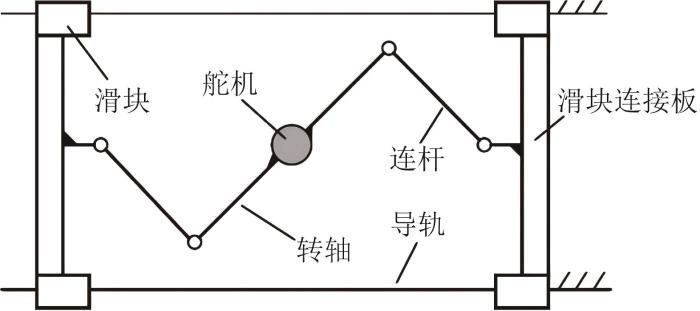
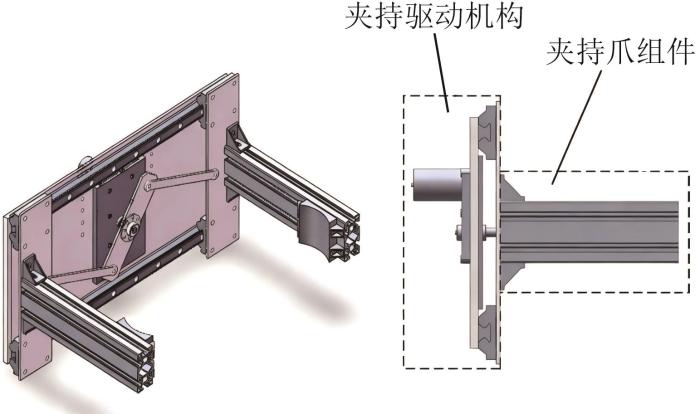
设计夹持模块的驱动机构,如图4所示。采用单一工业舵机为动力源,显著简化了控制系统。舵机输出扭矩使转轴转动,经连杆将动力传递至滑块连接板;滑块连接板被固定安装于导轨滑块机构,将舵机的转动转化为自身的张闭动作,实现夹持功能所需的启闭控制。通过调节舵机转角,可适应不同规格容器的抓取任务。
图4
夹持驱动机构的设计准则是提供足以平衡机器人启停惯性力的静摩擦力,以防止垃圾桶发生水平滑移,因此对于舵机负载,仅需考虑垃圾桶在水平方向的惯性力所产生的负载。水平方向的惯性力Fi为:
根据表1,m2=40 kg,amax=0.25 m/s2,则Fi=10 N。张闭方向的负载Fj=Fi,扭矩Tj的表达式为:
式中:Km为夹持模块的安全系数,lj为转轴长度,ηj为夹持模块的综合机械效率。
取Km=1.5,lj=100 mm,ηj=0.6,综合考虑双侧夹爪的对称叠加效应及动态工况系数(2.0),可得舵机的最小额定扭矩为10 N∙m。根据计算结果,选用ASMG-MT型舵机。
在夹持驱动机构中,舵机转轴仅负责动力传递,作业载荷由导轨滑块机构承担。计算可得导轨滑块机构在垂直方向上的最小容许静力矩MjR=48.51 N∙m,在平行方向上的最小容许静力矩MjY=30.87 N∙m,最小可承受静载荷Fj′=176.4 N。因此,选用HGH15C系列导轨滑块模组,其滑块类型为方型,额定静载荷为25.31 kN,垂直、水平方向上的容许静力矩分别为170、150 N∙m。
基于驱动机构选型方案及参数,完成夹持模块的结构设计,如图5所示。其中,2个夹持爪组件被固定连接于驱动机构的滑块连接板。
图5
1.2.3 提升模块
对于提升模块中丝杠的选型,主要考量夹持模块自重及负载所产生的轴向力,经计算确定丝杠模组的最小工作载荷Ft, min=705.6 N,最小承受力矩Mt, min=211.68 N∙m。依据性能需求,选用SGXII型开放式双线轨丝杠模组,其丝杠直径、导程和精度分别为20、5和0.03 mm,模组有效行程为40 mm。
1.3 零件有限元分析
对夹持模块的关键部件及垃圾桶进行有限元分析。夹持模块中,除夹持爪采用尼龙66材料(弹性模量为1 620 MPa,泊松比为0.41)外,其余部件均选用铝合金材料(屈服强度为280 MPa,弹性模量为71 000 MPa,泊松比为0.33)。垃圾桶外壳采用聚乙烯(polyethylene, PE)材料。
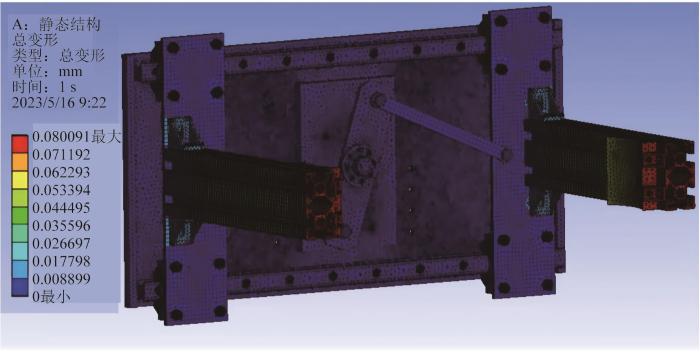
沿夹持爪端面向下施加约150 N的理论载荷力。运行该算例,得到夹持模块总变形图(图6),可得最大总变形量为0.08 mm,满足设计要求。
图6
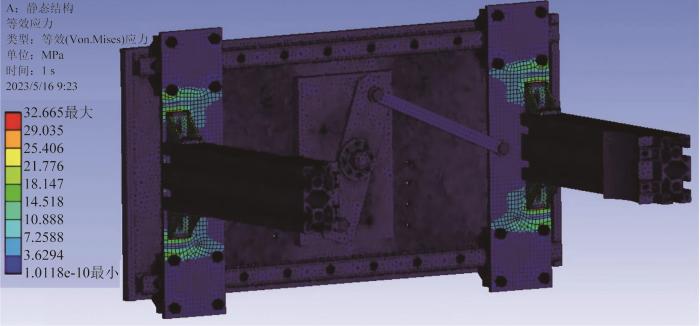
等效应力分析(图7)显示,最大应力为32.665 MPa,显著低于铝合金屈服强度275 MPa,满足结构设计要求。
图7
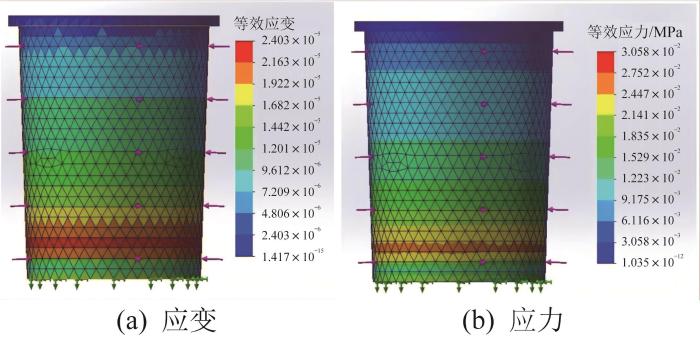
为确保夹持过程中垃圾桶的安全性,需进行静力学分析。当夹持质量为60 kg的垃圾桶时,单侧夹持爪的接触面积为6 777.34 mm2,承受压力为1 200 N。图8为小载荷预测试工况下垃圾桶的等效应力与应变图,该工况下的局部最大应力为3.058×10-2 MPa。由于采用线性静力学分析,实际满载工况(承受压力为1200 N)下的应力与应变分布特征与该工况一致,得出垃圾桶的最大总变形量为3.028 mm,最大应力为4.131 MPa。该应力峰值远低于PE材料的许用应力24.5 MPa,因此满足使用安全性要求。
图8
2 控制系统设计
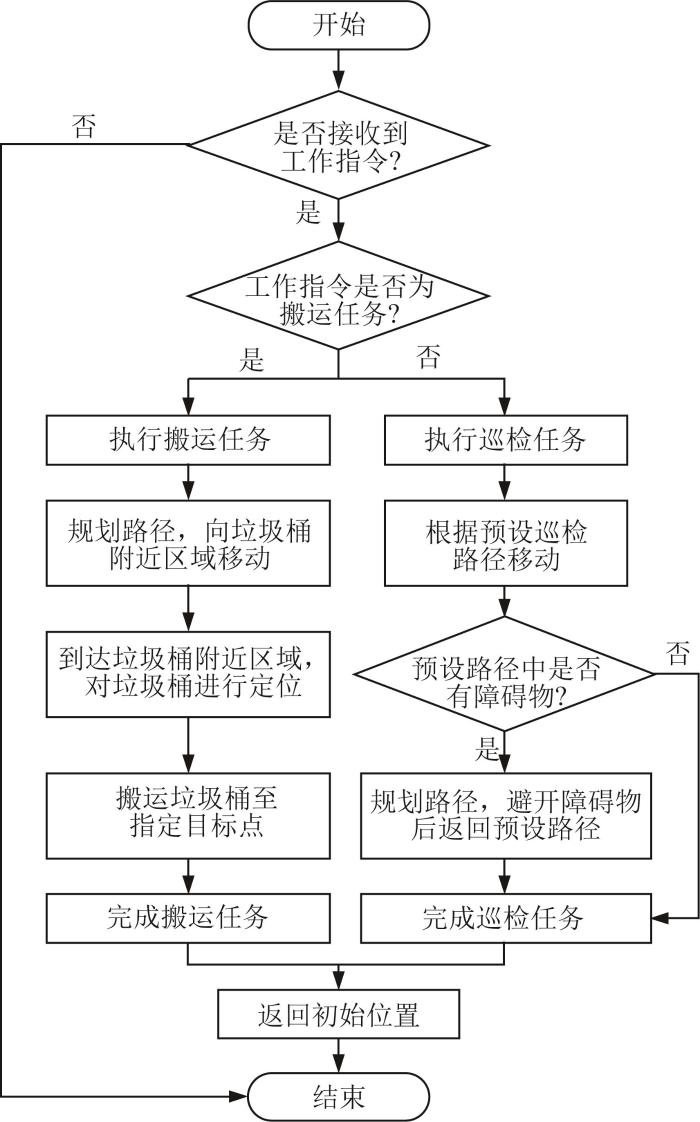
为完成楼宇垃圾桶搬运机器人控制系统的设计,需确定垃圾桶搬运的工作流程,如图9所示。
图9
2.1 控制系统总体架构
机器人的控制系统采用三级架构设计,包括上位机主控单元、下位机从控单元及执行单元,如图10所示。
图10
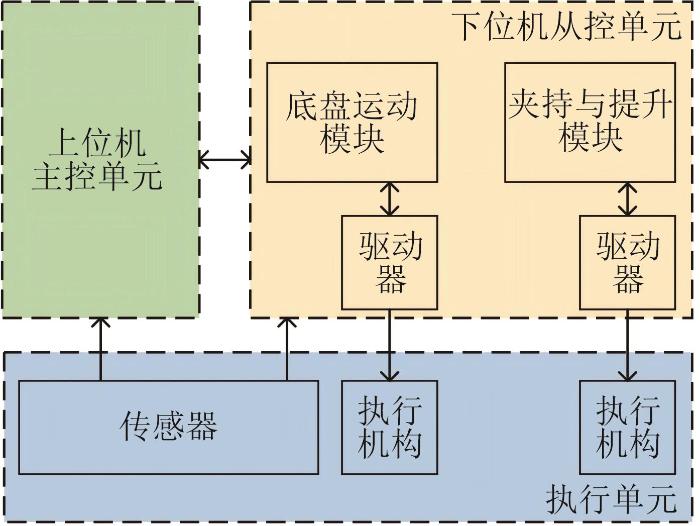
图10
楼宇垃圾桶搬运机器人控制系统架构
Fig.10
Control system architecture of building trash bin handling robot
2.2 上位机主控单元设计
上位机主控单元搭载树莓派4B平台,运行环境为Ubuntu 18.04操作系统和ROS Melodic框架。其核心功能包括:
1)建图与导航。利用Gmapping算法与激光雷达数据,完成环境建模、自主定位与全局/局部路径规划。
2)感知与识别。基于ar_track_alvar功能包,实现对垃圾桶AR标签的视觉识别与定位,并利用超声波测距数据进行末端精定位。
3)任务调度。基于move_base_flex功能包执行巡检任务,实现预设路径跟踪与实时避障。
4)通信管理。负责底层设备驱动管理,包括传感器(相机、激光雷达)数据采集和下位机通信(通过定制串口协议),并采用serial功能包实现通信接口重映射与协议封装。
2.3 下位机从控单元设计
基于STM32F407VET6微控制器与μC/OS-III实时操作系统设计下位机从控单元,确保控制的实时性。其核心功能包括:1)串口通信:采用中断方式与上位机进行自定义协议数据交换。2)底盘运动控制:解析上位机下发的速度指令,结合编码器反馈,实现基于PID控制的闭环轮速调节。3)夹持与提升控制:驱动舵机与步进电机完成垃圾桶的抓取与提升动作。4)传感器数据采集:实时采集超声波测距数据、底盘里程计信息并上传至上位机。
2.4 软件工作流程
软件工作流程主要包括以下三部分。
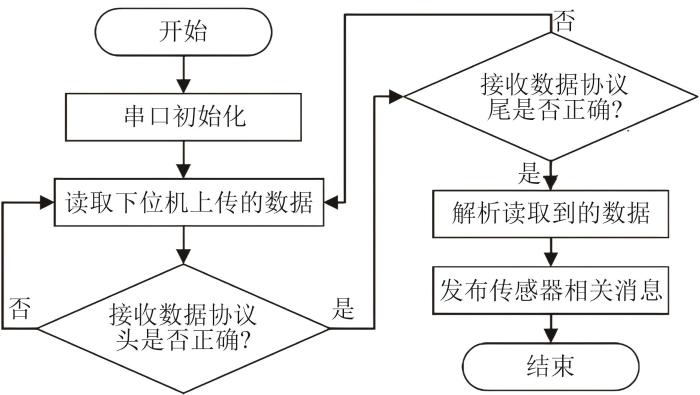
1)驱动层数据交互。该流程主要实现控制系统与底层硬件的实时数据通信与处理,具体包括相机、激光雷达及下位机串口驱动。其中,下位机通信基于开源serial包实现,采用自定义协议,并通过base_controller节点完成传感器数据的解析与发布,具体流程见图11。
图11
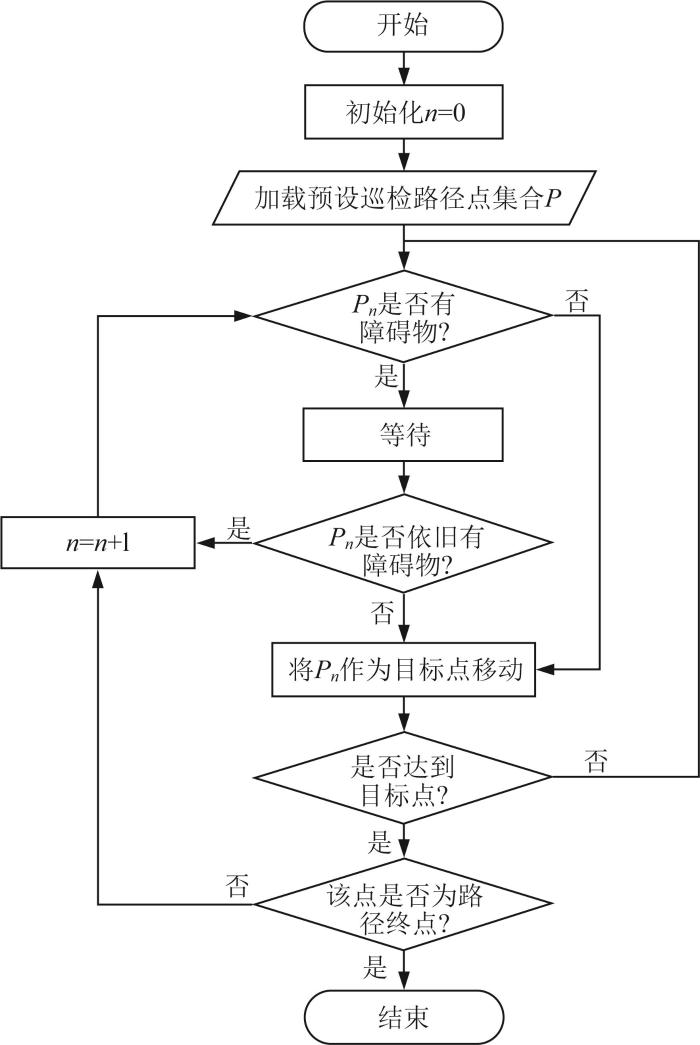
2)自主巡检。巡检功能依托Navigation导航框架实现,通过预设路径规划完成机器人的自主移动,具体流程如图12所示。
图12
3)目标识别与定位。基于ar_track_alvar功能包实现对垃圾桶的识别与定位。当机器人接近目标时,通过安装在垃圾桶上的AR标签获取其坐标信息,并结合超声波测距数据调整自身位姿,最终精确定位至夹持作业位置,其工作流程如图13所示。
图13
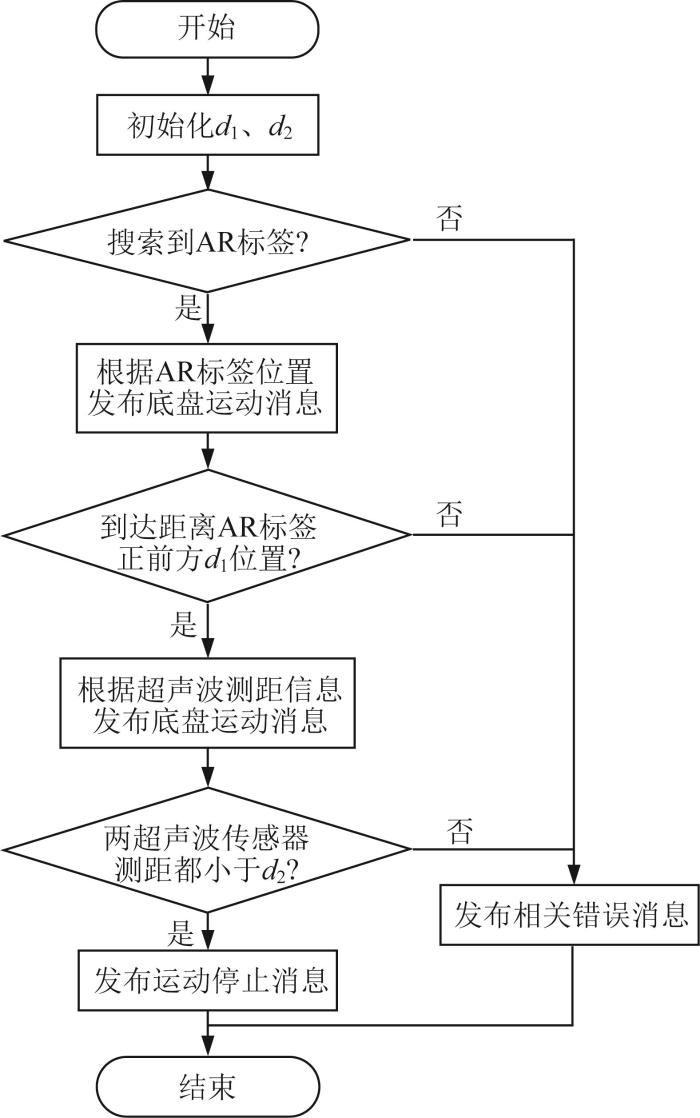
图13
目标识别与定位任务工作流程
Fig.13
Workflow of target recognition and localization tasks
3 路径规划算法优化
尽管A*算法及其改进算法已在移动机器人领域得到了广泛应用,但多数研究(如文献[8]引入的动态启发函数、文献[9]融合的人工势场法及文献[11]的自适应权重)主要优化了路径长度或计算时间,算法在复杂结构化环境(如楼宇)中的路径平滑性、运动稳定性以及对机器人物理约束的适应性仍有提升空间。尤其是当机器人携带负载(如垃圾桶)时,路径的频繁转折与抖动会直接影响运动平稳性与能耗效率。本文的改进A*算法与现有工作的核心差异在于:1)采用分层定向邻域搜索策略,在8邻域与24邻域间取得平衡,兼顾搜索效率与灵活性;2)引入了融合环境感知的自适应双权重启发函数,根据全局环境复杂度和搜索阶段动态调整搜索行为;3)设计了基于关键节点提取的后处理优化策略,生成更符合机器人运动学约束、转折更少的可执行路径。将三者结合,旨在确保规划路径不仅在理论上最优,而且在楼宇垃圾桶搬运这一特定场景中更实用、高效。
传统A*算法从起始节点开始,迭代计算8邻域节点的评价函数F(n)值,并选择最小代价节点进行扩展,重复该过程直至扩展至目标节点。计算公式如下:
图14
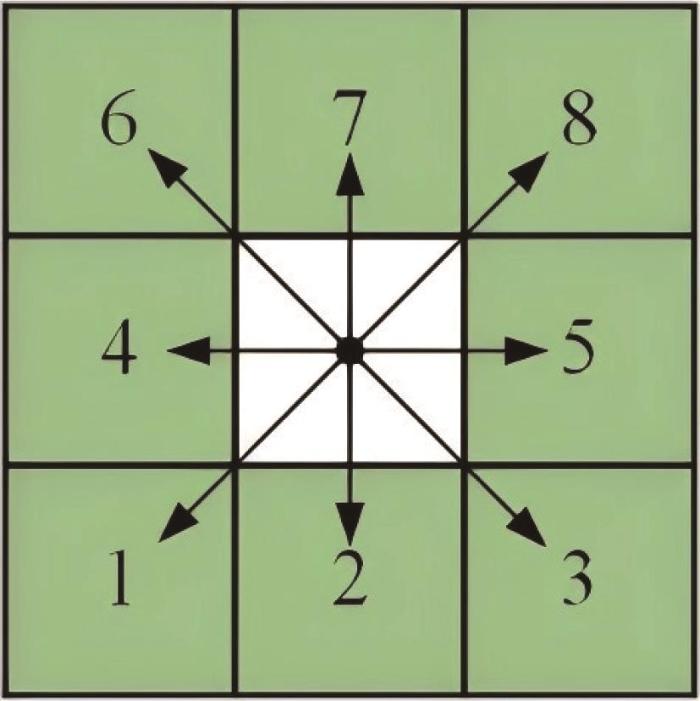
图15
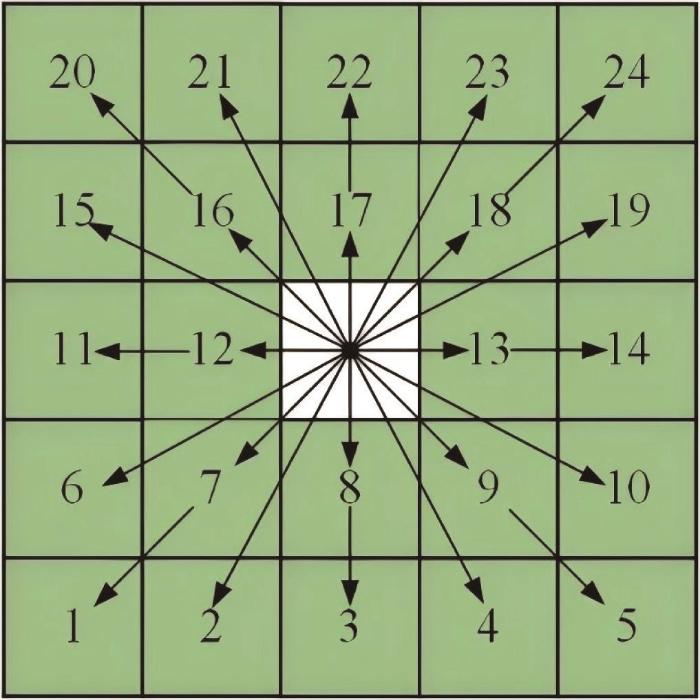
首先,定义当前节点坐标为(xc, yc),目标节点坐标为(xg, yg)。基于当前节点与目标节点的位置关系,定义内层搜索引导向量 P :
根据引导向量 P 与水平方向的夹角θ舍弃部分内层搜索邻域,只搜索内层7邻域,搜索规则见表2。
表2 内层搜索引导向量对应的搜索邻域
Table 2
| θ/(°) | 内层搜索邻域 |
|---|---|
| [337.5, 360.0)∪[0, 22.5) | 7, 8, 9, 13, 16, 17, 18 |
| [22.5, 67.5) | 8, 9, 12, 13, 16, 17, 18 |
| [67.5, 112.5) | 7, 9, 12, 13, 16, 17, 18 |
| [112.5, 157.5) | 7, 8, 12, 13, 16, 17, 18 |
| [157.5, 202.5) | 7, 8, 9, 12, 16, 17, 18 |
| [202.5, 247.5) | 7, 8, 9, 12, 13, 16, 17 |
| [247.5, 292.5) | 7, 8, 9, 12, 13, 16, 18 |
| [292.5, 337.5) | 7, 8, 9, 12, 13, 17, 18 |
为优化搜索性能,采用选择性邻域扩展策略:保留{2, 4, 6, 10, 15, 19, 21, 23}号外层节点,剔除其余节点。基于外层引导向量确定扩展方向,确保搜索过程兼具方向性和目的性,并计算保留节点的评价函数F(n)。假设评价函数值最小的节点nt坐标为(xt, yt),定义外层扩展引导向量 Q :
根据Qx 与Qy 值的正负性,确定外层扩展节点,扩展规则如表3所示。
表3 外层扩展引导向量对应的扩展邻域
Table 3
| Qx | Qy | 外层扩展邻域 |
|---|---|---|
| 正 | 零 | 4, 10, 19, 23 |
| 正 | 正 | 10, 19, 21, 23 |
| 零 | 正 | 15, 19, 21, 23 |
| 负 | 正 | 6, 15, 21, 23 |
| 负 | 零 | 2, 6, 15, 21 |
| 负 | 负 | 2, 4, 6, 15 |
| 零 | 负 | 2, 4, 6, 10 |
| 正 | 负 | 2, 4, 10, 19 |
为了验证改进算法的有效性,利用MATLAB软件对传统A*、24邻域A*以及改进A*算法进行仿真对比。实验在20×20、30×30、50×50的栅格地图中进行,规定路径起点均为(1, 1),目标点分别为(20, 20)、(30, 30)、(50, 50)。3种算法的性能对比见表4,表明改进的11邻域A*算法虽然较24邻域A*算法缩短了搜索时间,但仍落后于传统A*算法。
表4 传统A* 、24邻域A* 和所提11邻域A* 算法的性能对比
Table 4
| 地图大小 | 算法 | 搜索时间/ms | 路径长度/ 栅格数 |
|---|---|---|---|
| 20×20 | 传统A* | 68.48 | 30.38 |
| 24邻域A* | 109.11 | 28.78 | |
| 11邻域A* | 78.30 | 30.49 | |
| 30×30 | 传统A* | 107.87 | 44.53 |
| 24邻域A* | 221.18 | 43.15 | |
| 11邻域A* | 146.39 | 44.68 | |
| 50×50 | 传统A* | 264.45 | 74.57 |
| 24邻域A* | 518.12 | 72.07 | |
| 11邻域A* | 292.85 | 74.01 |
通过优化启发函数,以进一步提升算法效率。引入距离权重系数w1和障碍物权重系数w2,并根据实际情况动态调整w1和w2的值,此时F(n)的表达式为:
在路径规划初期,取w1≈1,通过增大启发函数H(n)的权重来提升搜索效率;在路径规划后期,取w1≈0,通过降低H(n)权重扩大搜索范围,以避免陷入局部最优解。针对环境复杂度差异,在障碍物较少的简单环境中,取w2≈0,H(n)权重主要由w1决定;在复杂环境中则增大w2值,通过扩大搜索范围确保路径安全性。
图16
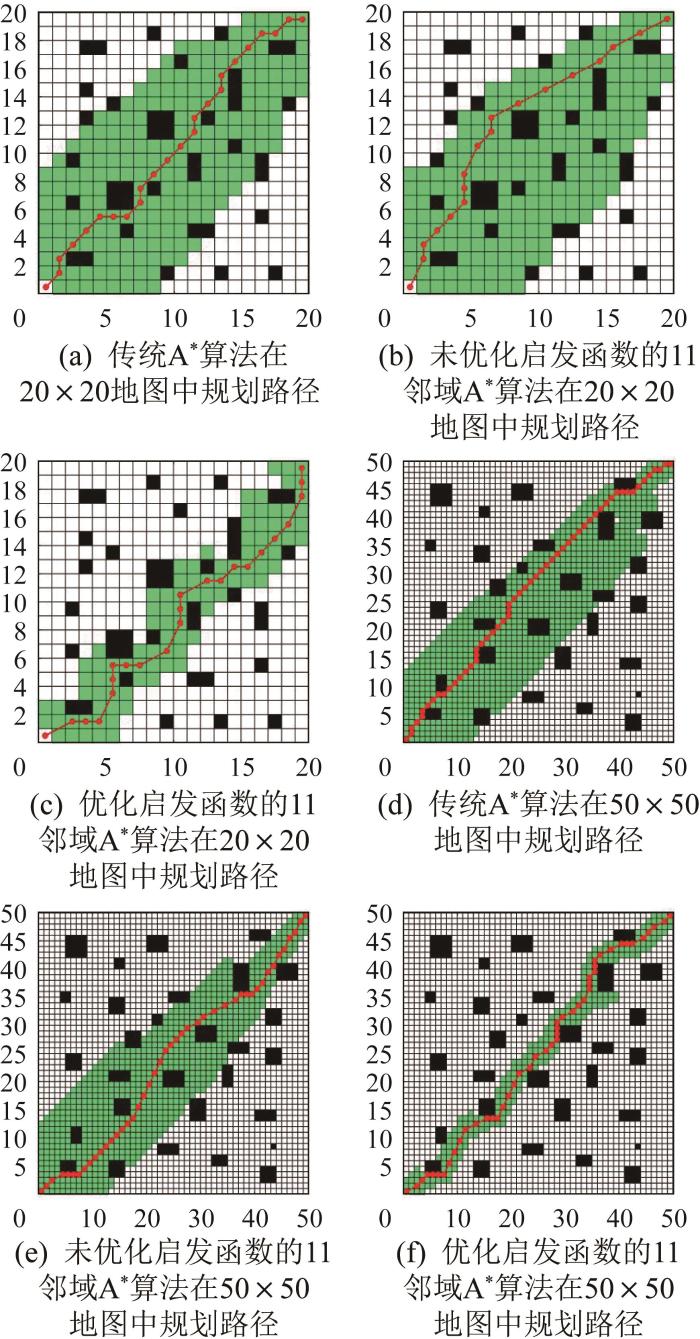
图16
优化启发函数的11邻域A* 算法与对比算法在简单环境中规划路径
Fig.16
Path planning using 11-neighborhood A* algorithm with optimized heuristic function and comparison algorithms in simple environment
图17
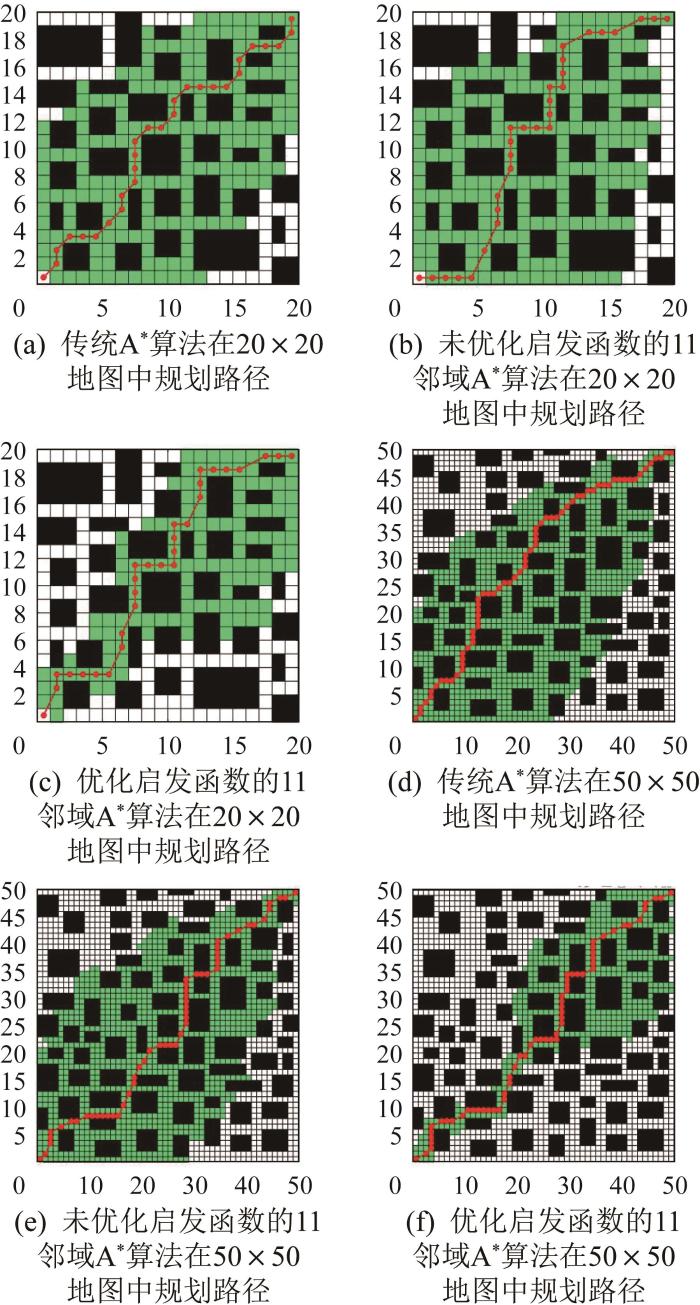
图17
优化启发函数的11邻域A* 算法与对比算法在复杂环境中规划路径
Fig.17
Path planning using 11-neighborhood A* algorithm with optimized heuristic function and comparison algorithms in complex environment
表5 优化启发函数的11邻域A* 算法与对比算法在不同环境中的性能对比
Table 5
| 地图大小 | w2 | 对比算法 | 搜索节点数/% | 搜索时间/% | 路径长度/% |
|---|---|---|---|---|---|
| 20×20 | 0.1 | 传统A* | -76.49 | -78.47 | +6.00 |
| 11邻域A* | -77.78 | -81.78 | +7.29 | ||
| 0.4 | 传统A* | -51.07 | -31.78 | +8.27 | |
| 11邻域A* | -37.12 | -42.74 | 0 | ||
| 50×50 | 0.1 | 传统A* | -83.45 | -88.09 | +3.96 |
| 11邻域A* | -85.36 | -90.31 | +4.43 | ||
| 0.4 | 传统A* | -51.13 | -38.38 | +4.32 | |
| 11邻域A* | -55.17 | -54.47 | +2.33 |
图18
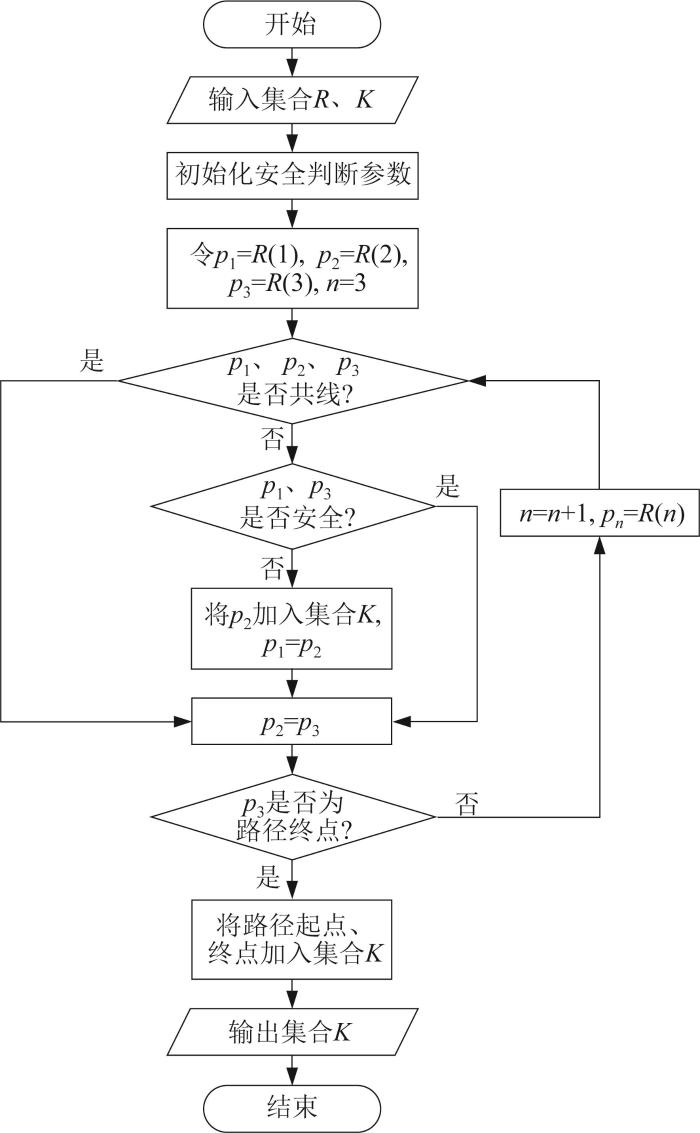
图19
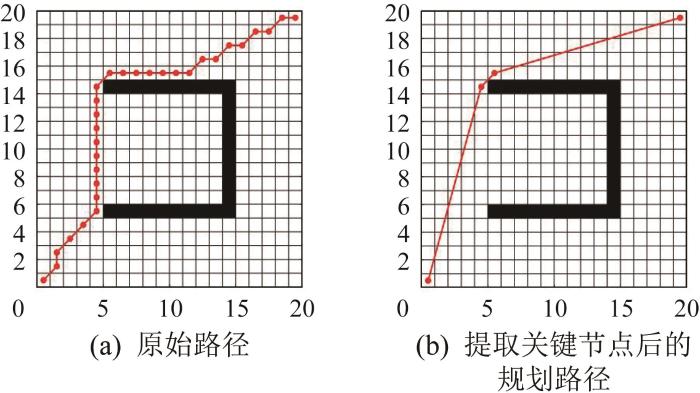
图19
传统A* 算法应用关键节点提取策略前后的规划路径
Fig.19
Planned paths of traditional A* algorithm before and after applying key node extraction strategy
4 样机测试
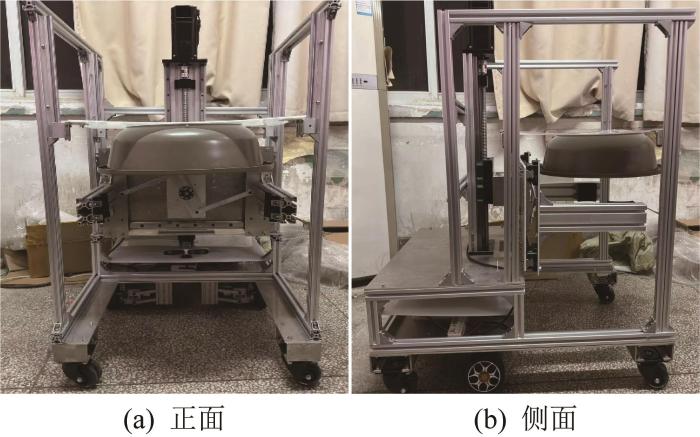
搭建楼宇垃圾桶搬运机器人样机,如图20所示。为验证机器人的基本功能与设计可靠性,对其进行系统测试。
图20
4.1 单目标点导航与避障功能测试
图21

图22
为了测试楼宇垃圾桶搬运机器人的导航与避障功能,通过RVIZ界面设定目标点,并预先在规划路径上放置障碍物。测试结果如图23所示,当激光雷达检测到障碍物(以膨胀区显示)时,机器人能实时重新规划路径并安全避障,表明其具备可靠的单目标点自主导航能力。
图23
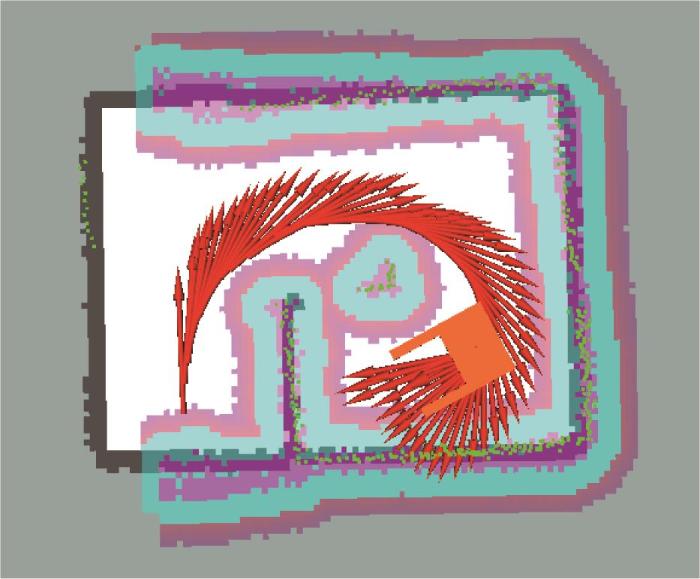
图23
导航与避障功能测试结果
Fig.23
Test result of navigation and obstacle avoidance function
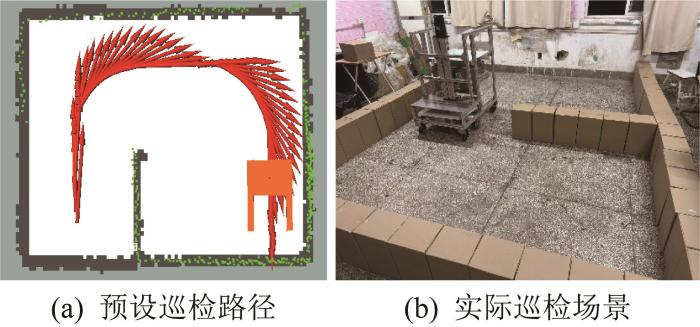
4.2 楼宇巡检功能测试
图24
4.3 垃圾桶搬运功能测试
为验证楼宇垃圾桶搬运机器人的搬运性能,共进行30次抓取测试,如图25所示,成功22次,成功率为73.3%。
图25

测试流程如下:1)机器人通过单目标点导航快速移动至垃圾桶附近,调用AR标签识别服务,获取相对坐标;2)在AR标签正前方900 mm处就位后,提升模块下降;3)基于超声波测距数据调整位姿(阈值为200 mm),触发夹持动作;4)完成垃圾桶提升后返回起点。实验验证了机器人具备可靠的搬运能力。
对失败案例的分析表明,超声波传感器信号干扰是导致末端精定位失败的主要原因。干扰主要产生于以下场景与机制:1)多径反射:在狭窄的走廊环境中,超声波脉冲经墙壁、地面多次反射后返回接收器,导致测距值大于真实距离。2)镜面反射:垃圾桶或周围金属门板等的光滑表面对超声波信号产生镜面反射,致使传感器接收不到回波,从而输出无效数据。
针对上述问题,未来可从以下2个方向进行改进:1)传感器冗余融合,即在机器人夹持模块附近增加1组低成本红外测距传感器,通过卡尔曼滤波器对超声波与红外数据进行融合,并利用红外传感器受多径反射影响较小的特点,修正超声波异常数据。2)信号处理算法优化,即采用滑动中值滤波方法对原始超声数据进行预处理,以抑制突变的干扰信号;当连续多次测距失败时,触发视觉重定位流程,提高机器人的鲁棒性。
5 结 论
本文设计了一种具备楼宇垃圾桶自动搬运功能的机器人,并通过仿真实验和样机测试验证了该机器人的目标功能。
1)根据设计要求,将机器人本体分为底盘运动、提升和夹持模块,分别进行结构设计。
2)根据楼宇垃圾桶搬运机器人的工作流程,确定机器人控制系统需要实现的功能。将机器人功能分为运动导航、感知定位、底层控制三大模块。对控制器、激光雷达等控制系统硬件进行选型,确定硬件配置,进而完成软硬件集成与平台搭建。
3)对机器人路径规划算法进行优化,改进传统A*算法,优化启发函数,提高了搜索灵活性与效率。与传统算法相比,优化邻域策略后的11邻域A*算法在不同规模地图中的搜索时间降幅达44%,同时启发函数优化也使搜索节点数减少了50%~80%。此外,关键点提取策略使机器人准确执行较优路径,并大大减少了无用转角,使规划路径更加流畅。
4)完成了楼宇垃圾桶搬运机器人的样机搭建,并模拟楼宇环境完成了机器人的单目标点导航与避障、楼宇巡检、垃圾桶搬运功能测试。
本文设计的机器人仍存在较大的改进空间,未来将进一步增强机器人的搬运功能,并测试其在复杂楼宇环境中的行走功能。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.174
参考文献
机器人感知与控制关键技术及其智能制造应用
[J].
Key technologies of robot perception and control and its intelligent manufacturing applications
[J].
室内搬运机器人系统设计与实现
[D].
Design and implementation of indoor handling robot system
[D].
差速移动机器人驱动控制系统设计与研究
[D].
Design and research on driving control system for differential mobile robot
[D].
差速轮式移动机器人控制系统设计
[J].
Design of the control system for a differential wheeled mobile robot
[J].
基于嵌入式实时系统的移动机器人控制系统设计
[D].
Design of mobile robot control system based on embedded real-time system
[D].
面向楼宇内多场景环境的四足机器人自主导航系统设计
[D].
Design of autonomous navigation system for quadruped robot in multi-scene environment of buildings
[D].
移动机器人楼宇服务建图与导航关键技术研究
[D].
Research on key technologies of mapping and navigation for building services mobile robot
[D].
基于改进A*算法的移动机器人路径规划
[J].
Mobile robot path planning based on an improved A* algorithm
[J].
基于改进A*算法的机器人路径规划
[J].
Robot path planning based on improved A* algorithm
[J].
融合A*算法与人工势场法的动态路径规划
[J].
Dynamic path planning based on the integration of A* algorithm and artificial potential field method
[J].
基于改进A*算法的移动机器人路径规划
[J].
Path planning of mobile robot based on improved A* algorithm
[J].
Path planning of intelligent robots based on improved A* algorithm
[J].
Autonomous driving path planning algorithm based on improved A* algorithm in unstructured environment
[J].
Application improvement of A* algorithm in intelligent vehicle trajectory planning
[J].
基于改进A*算法的无人车路径规划研究
[J].
Research on path planning for unmanned vehicles based on improved A* algorithm
[J].
改进A*算法与动态窗口法的机器人动态路径规划
[J].
Improved A* algorithm and dynamic window method for robot dynamic path planning
[J].
融合改进A*和TEB算法的机器人路径规划
[J].
Robot path planning based on the fusion of improved A* and TEB algorithm
[J].
基于改进A*算法的机器人全覆盖衔接路径规划
[J].
Improved A* algorithm for robot full coverage connection path planning
[J].
改进A*算法和动态窗口法的移动机器人路径规划研究
[D].
Research on path planning of mobile robot based on improved A* algorithm and dynamic window method
[D].
融合改进A*和DWA算法的室内机器人路径规划
[J].
Indoor robot path planning incorporating improved A* algorithms and DWA
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}