楼宇垃圾桶搬运机器人设计研究
Research on design of building trash bin handling robot
楼宇垃圾桶搬运机器人设计研究 |
| 李志刚,邹骏鹏,杨翔 |
|
Research on design of building trash bin handling robot |
| Zhigang LI,Junpeng ZOU,Xiang YANG |
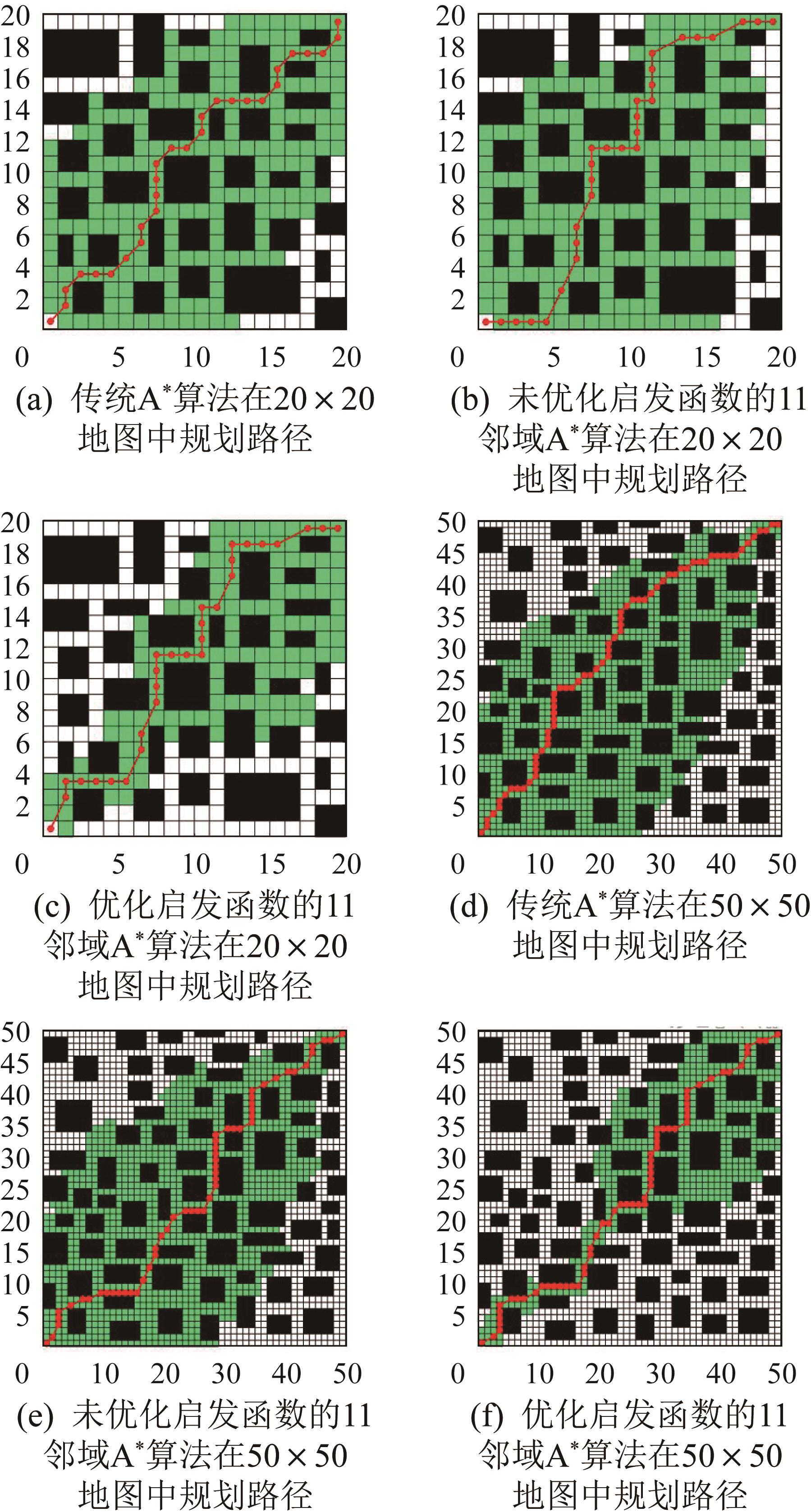
| 图17 优化启发函数的11邻域A* 算法与对比算法在复杂环境中规划路径 |
| Fig.17 Path planning using 11-neighborhood A* algorithm with optimized heuristic function and comparison algorithms in complex environment |
|
|