楼宇垃圾桶搬运机器人设计研究
Research on design of building trash bin handling robot
楼宇垃圾桶搬运机器人设计研究 |
| 李志刚,邹骏鹏,杨翔 |
|
Research on design of building trash bin handling robot |
| Zhigang LI,Junpeng ZOU,Xiang YANG |
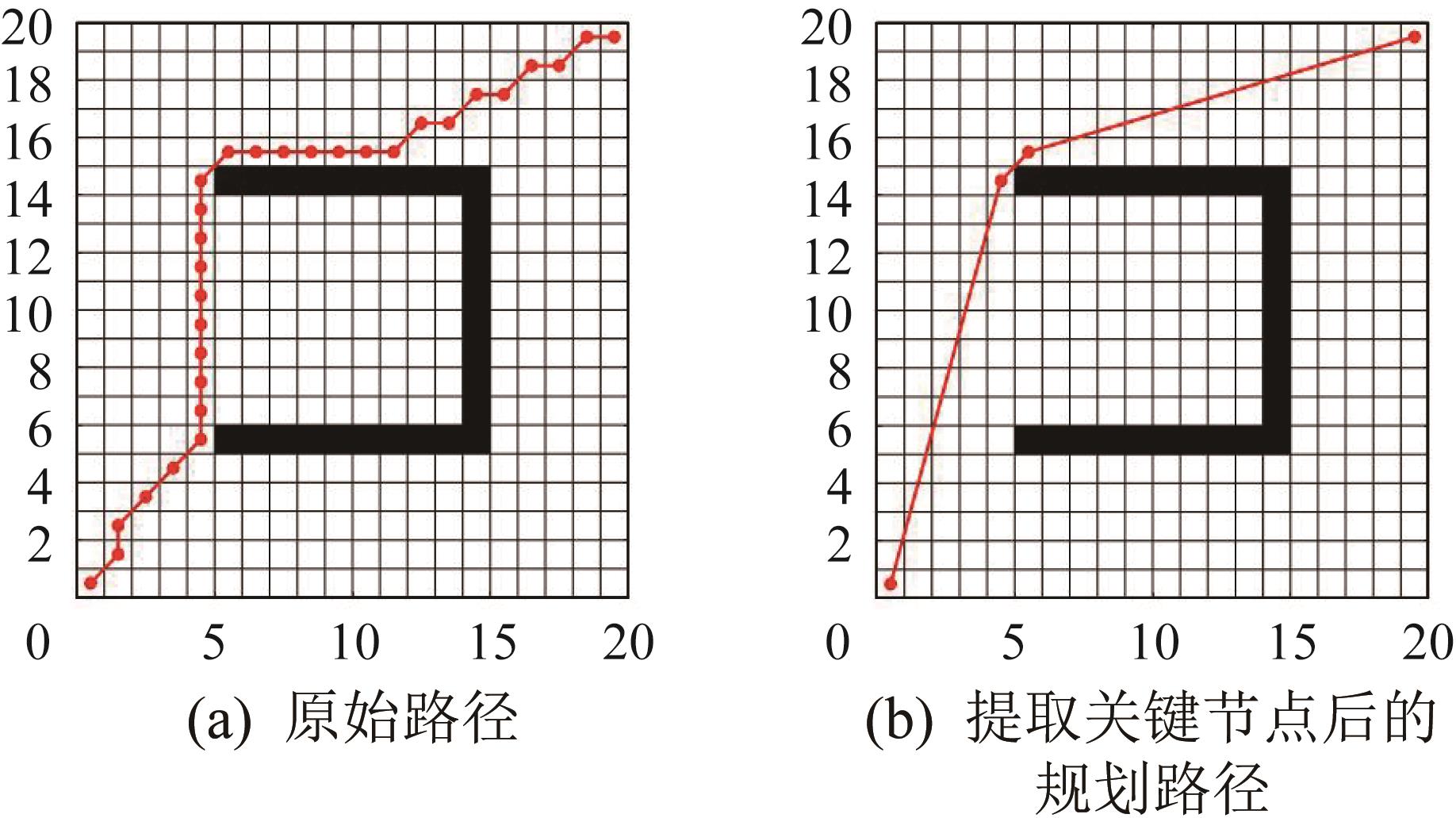
| 图19 传统A* 算法应用关键节点提取策略前后的规划路径 |
| Fig.19 Planned paths of traditional A* algorithm before and after applying key node extraction strategy |
|
|