


近年来,国内外学者通过柔性驱动的方式设计了多种爬行-跳跃机器人[10-13]。Hu等[14]基于磁场驱动设计了一种多模式的软体机器人,其具有爬行、跳跃、游泳、蠕动等多种运动功能,在人体内药物释放、辅助治疗中具有广阔的应用前景。Kellaris等[15]采用静电挤压液体的方式设计了一种软体爬行-跳跃机器人,其通过高频驱动实现快速爬行,并可实现约为自身高度1倍的5.5 cm的跳跃高度。Huang等[16]将U形记忆合金丝嵌入柔性板结构中,通过电压加热的方式实现机器人跳跃。Ahn等[17]采用光敏柔性材料设计了一种方形块状的软体机器人,通过光驱动的方式使机器人向有光的一侧弯曲,从而实现爬行、跳跃等运动。
1 执行器设计
1.1 执行器结构
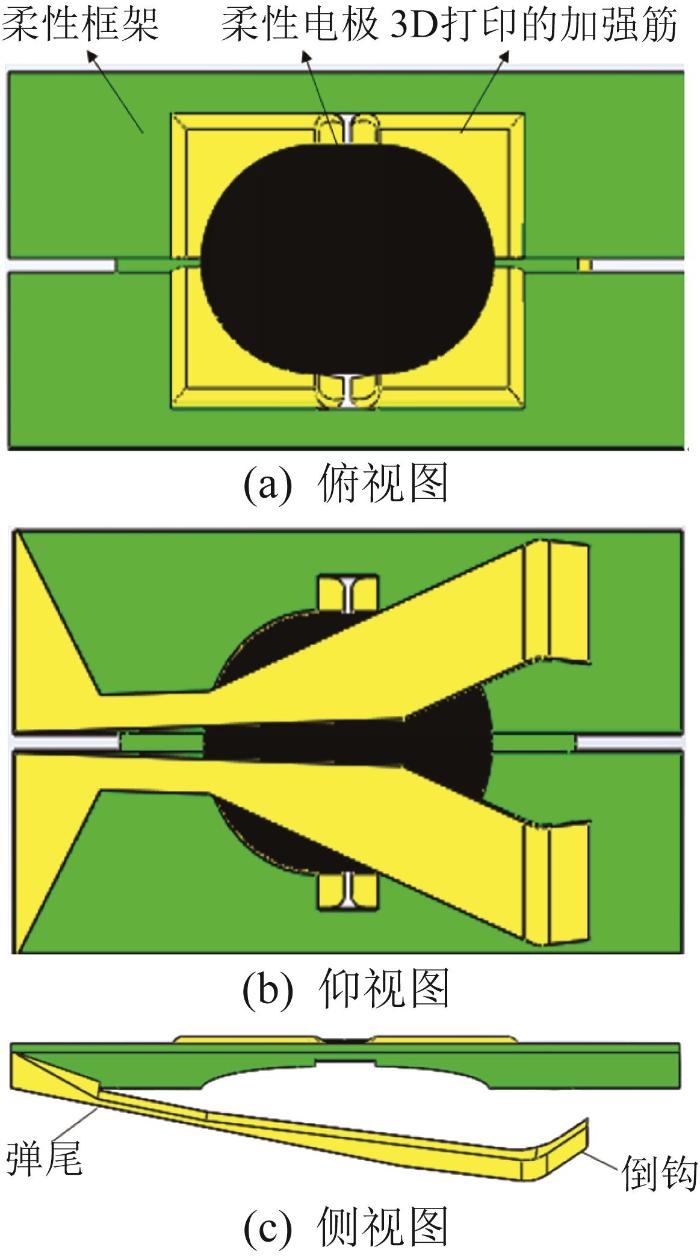
为了利用介电弹性体宽度和长度两个方向的预应力来设计执行器结构,笔者将传统介电弹性体执行器的2个加强筋设计为4个加强筋,使执行器可以绕2个中间轴产生弯曲变形。
图1
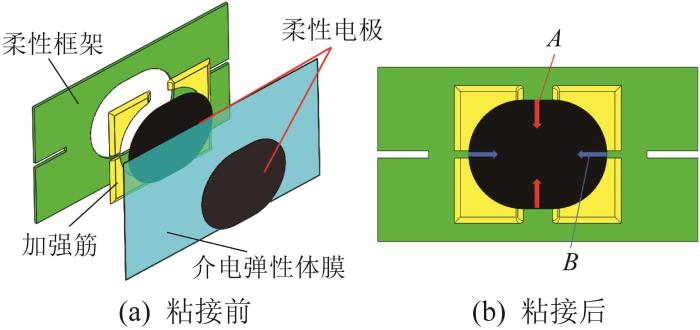
图1
双稳态介电弹性体执行器结构
Fig.1
Structure of bi-stable state dielectric elastomer actuator
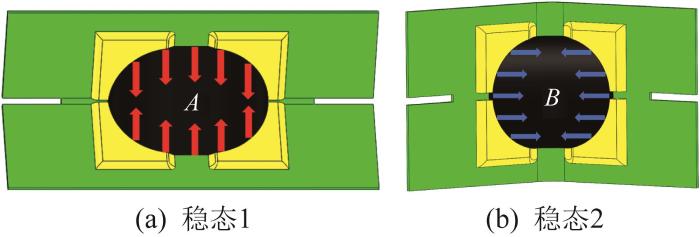
分别将沿执行器宽度和长度方向介电弹性体膜的预应力设为A和B,则执行器在A作用下形成稳态1的变形,在B作用下形成稳态2的变形,如图2所示。
图2
1.2 执行器工作原理
图3
图4
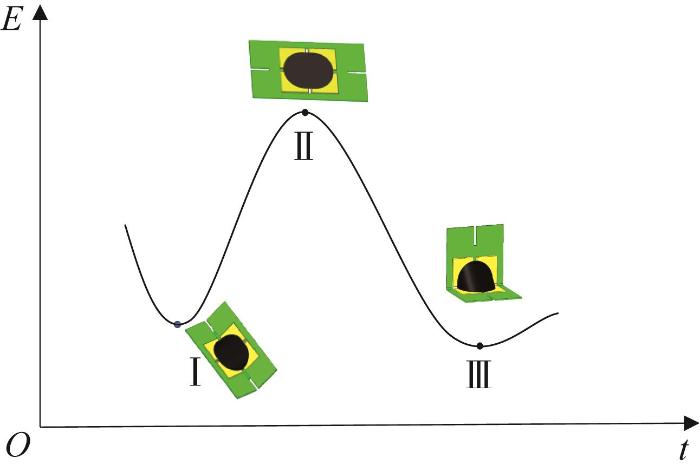
执行器的能量E随时间t的变化过程如图5所示。将执行器稳态1的I点作为跳跃的初始点,当执行器接收到跳跃指令后,外力开始对执行器做功,执行器则开始变形、蓄力,当外力做的功达到执行器稳态切换所需的能量时,执行器处于稳态切换的临界(即Ⅱ点);随后,外力停止做功,执行器迈过Ⅱ点,朝着稳态2的Ⅲ点变形,在变形过程中释放的能量使执行器跳跃;跳跃完成后,通过外力做功使执行器从Ⅲ点逆向返回,回到初始状态等待下一个跳跃指令。
图5
1.3 执行器尺寸参数
执行器的尺寸参数如图6所示。执行器变形大小和能量输出能力与其柔性框架发生弯曲变形的区域有关。柔性框架发生弯曲变形的区域大多分布在加强筋之间的空隙中,柔性框架中间的镂空部分是介电弹性体膜涂覆柔性电极的区域,也是介电弹性体膜在通电过程中变形的区域。通过分析可知,柔性框架弯曲角度与加强筋的间隙s1、s2和加强筋的厚度p成正比,与加强筋宽度方向的边界到柔性框架的距离w及柔性电极长度方向的边界到柔性框架的距离l成反比。此外,柔性电极的半圆形半径r越大,镂空区域的面积越大,则柔性框架弯曲角度越大。柔性电极两半圆圆心距q越大,介电弹性体膜的驱动区域越大,但过大(相当于简支梁的跨度过大)会导致柔性框架容易沿轴线塌陷,执行器将失去双稳态特性。执行器的长度L会影响后续设计的仿生机器人的长度,执行器的宽度W会影响机器人的宽度。w、l需大于等于4 mm,以避免介电弹性体膜粘贴面积不足,导致粘附力不足而使薄膜从柔性框架中脱落。同理,加强筋的厚度p和长度u不能过大。柔性框架的厚度d是影响框架弯曲角度的主要因素,需恰当选择。经过不断地调整和试验,选定的执行器的尺寸参数值如表1所示。
图6
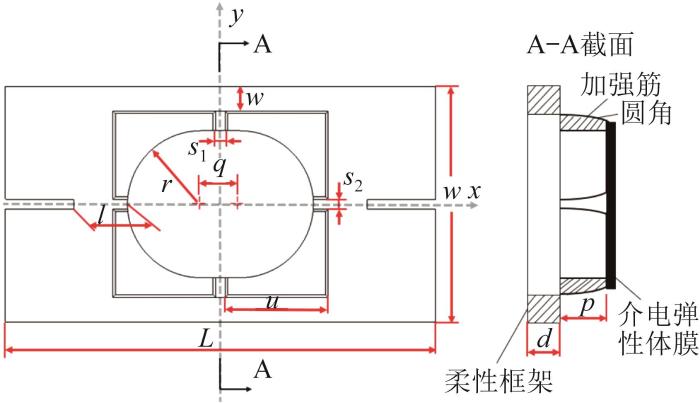
表1 执行器尺寸参数值 (mm)
Table 1
| 参数 | 数值 |
|---|---|
| d | 0.188 |
| w | 5 |
| l | 10 |
| r | 15 |
| q | 8 |
| L | 88 |
| W | 48 |
| s1 | 5 |
| s2 | 5 |
| u | 18 |
| p | 1 |
2 执行器性能测试
2.1 体执行器制作
执行器的制作流程如图7所示。
图7
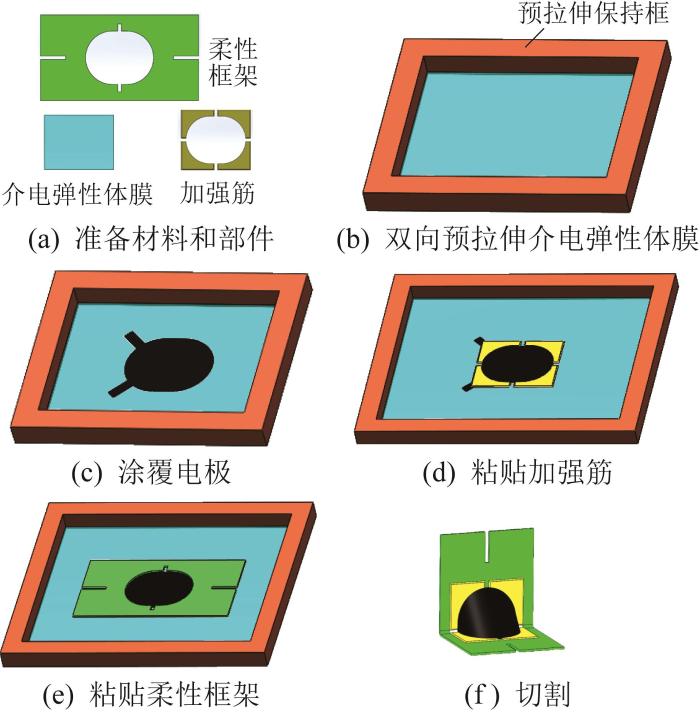
先准备VHB4910介电弹性体膜和部件,如图7(a)所示。首先,裁剪介电弹性体膜。由于预拉伸装置的尺寸是固定的,介电弹性体膜预拉伸后的最终尺寸是确定的,因此介电弹性体膜的尺寸通过预拉伸装置的尺寸除以预拉伸率得到。预拉伸率定义为介电弹性体膜拉伸后的长度与原长度的比值。然后,双向预拉伸介电弹性体膜,如图7(b)所示,即先纵向拉伸介电弹性体膜,再横向拉伸,并用预拉伸保持框固定拉伸装置中间区域的介电弹性体膜。该区域远离拉伸固定端,根据圣维南原理,其可近似为应力均匀区。最后,将预拉伸保持框从介电弹性体膜中裁剪出来,在空气中静置一段时间(约1.5 h),以避免介电弹性体膜的黏弹性(应变滞后)对柔性框架弯曲角度的影响。
在预拉伸保持框中间区域介电弹性体膜的上下表面涂覆柔性电极,并分别引线,如图7(c)所示。引线处需错开介电弹性体膜另一面涂有柔性电极的区域,以避免通高压电后引线处电压过大导致介电弹性体膜被击穿。依靠介电弹性体膜本身的黏性粘贴4个加强筋,如图7(d)所示。加强筋由通过激光切割的亚克力板或者PLA(polylactic acid,聚乳酸)材料通过3D打印制作而成。亚克力板与介电弹性体膜之间有较大的黏合力,而通过3D打印制作的加强筋的结构可以更复杂。若想进一步增大加强筋的黏合力,可将加强筋加工出圆角,来增大粘接面积。加强筋通过介电弹性体膜与柔性框架粘接,如图7(e)所示。最后,将执行器从预拉伸保持框中切割出来,如图7(f)所示。
2.2 介电弹性体膜预拉伸率对执行器性能的影响
介电弹性体膜预拉伸率对执行器性能的影响很大,包括对执行器稳态弯曲角度和动态响应的影响。
2.2.1 对弯曲角度的影响
执行器的尺寸参数按初始参数设定。分别将介电弹性体膜宽度方向的预拉伸率εy 设为常量400%和500%,改变其长度方向的预拉伸率εx,测量执行器稳态2下的弯曲角度α2,结果如图8所示。由图可知:α2与εx 正相关;当εx 相等时,εy 越大,α2越小。此外,双稳态执行器需具有一定的介电弹性体膜预拉伸率范围,否则就为单稳态。
图8
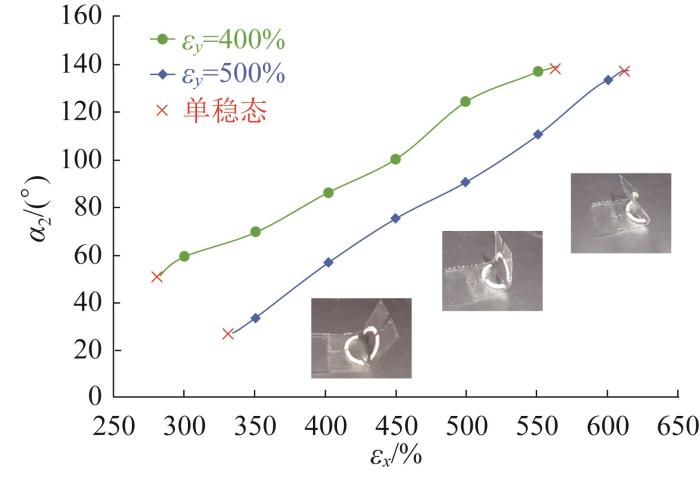
图8
介电弹性体膜预拉伸率对执行器稳态2下弯曲角度的影响
Fig.8
Influence of pre-stretching rate of dielectric elastomer membrane on bending angle under steady state 2 of actuator
同理,测量2组执行器稳态1下的弯曲角度α1,如图9所示。由图可知:α1与εx 负相关;当εx 相等时,εy 越大,α1越大。此外,εy 越大,执行器满足双稳态时的最小εx 与最大εx 越大。
图9
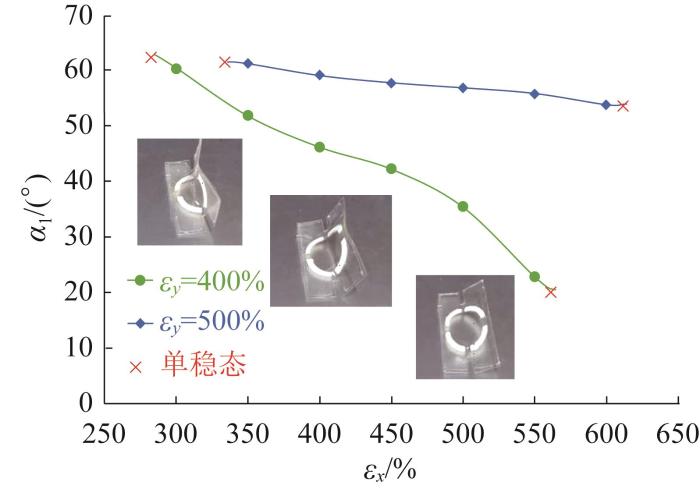
图9
介电弹性体膜预拉伸率对执行器稳态1下弯曲角度的影响
Fig.9
Influence of pre-stretching rate of dielectric elastomer membrane on bending angle under steady state 1 of actuator
综上,可以通过改变介电弹性体膜的预拉伸率来满足执行器不同的应用需求。
2.2.2 对动态响应的影响
表2 4种执行器介电弹性体膜的预拉伸率 (%)
Table 2
| 执行器 | εx | εy |
|---|---|---|
| 执行器1 | 400 | 500 |
| 执行器2 | 500 | 400 |
| 执行器3 | 400 | 400 |
| 执行器4 | 500 | 500 |
图10
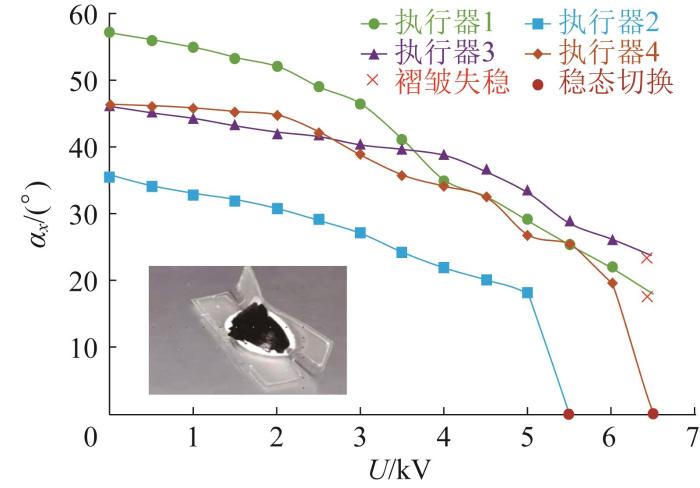
图10
执行器稳态1下的动态响应曲线
Fig.10
Dynamic response curves under steady state 1 of actuators
同理,执行器初始状态为稳态2,对执行器进行通电响应测试,结果如图11所示。由图可知:执行器1和执行器3分别在5.5、6.5 kV电压时实现了稳态2的构型向稳态1构型的切换;εx 越小,稳态2向稳态1的切换越容易,切换所需的电压越低;执行器2和执行器4均在6.5 kV电压时出现了褶皱失稳,无法实现稳态切换;切换时,αy 骤减为0。
图11
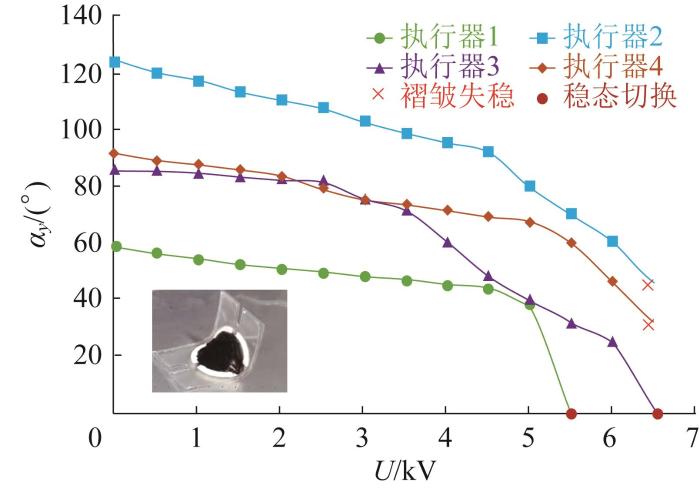
图11
执行器稳态2下的动态响应曲线
Fig.11
Dynamic response curves under steady state 2 of actuators
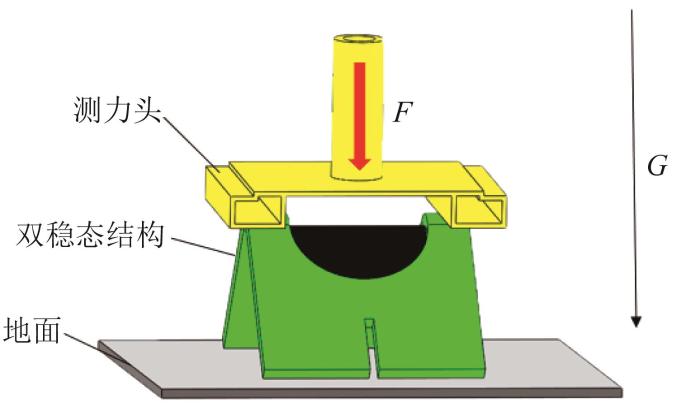
2.3 执行器输出力矩测试
执行器在稳态变形过程中,可以向外输出力矩。为了得到执行器变形过程中的输出力矩,采用施加外力的方式来计算。将测力计放置在执行器末端,测力头安装在测力计上。测试装置如图12所示。测力头匀速往下移动,驱使执行器变形。地面需光滑,执行器才能在地面自由展开。
图12
执行器测试过程中的力学分析如图13所示。
图13
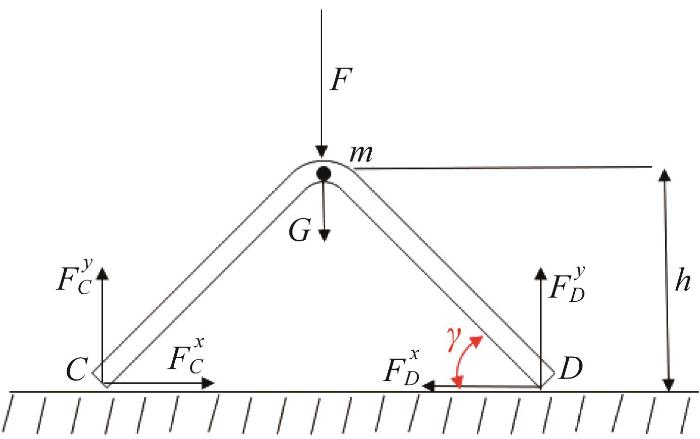
图13
执行器测试过程中的力学分析
Fig.13
Mechanical analysis of actuator during testing process
测力头的位移s=vtt,其中:v为测力头的下降速度,tt为测试时间。执行器末端与地面的夹角γ=arcsin (2ℎ/L)=arcsin [2(ℎ0-vtt)/L],其中ℎ0为执行器初始高度。以执行器为对象,其静力平衡方程为:
式中:F为所施加的力,FCy 、FDy 分别为执行器两端点C、D在y向的受力,m为执行器质量。
因为
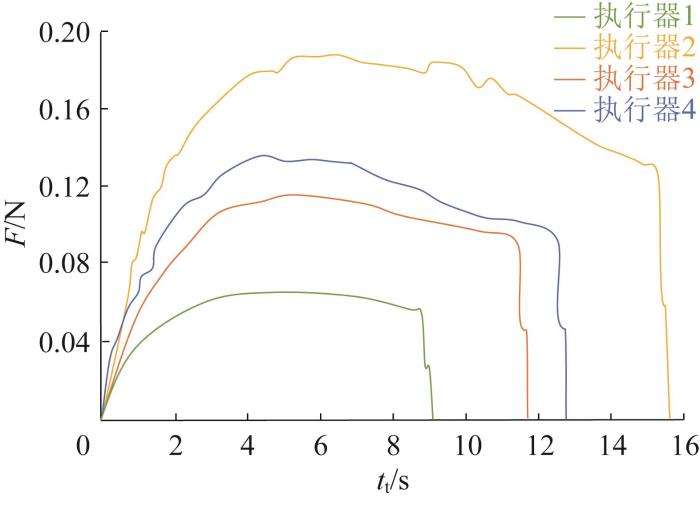
通过测试得到施加力变化曲线,如图14所示。由图可知,F先增大后减小,稳态切换时,F骤减为0。
图14
根据测力计的移动速度,得出执行器末端与地面夹角的变化曲线,如图15所示。由图可知:执行器从稳态2开始,γ均匀减小至0,执行器完成了稳态2向稳态1的切换;4条直线基本平行,说明执行器从稳态2切换至稳态1所需的时间与执行器稳态2下的弯曲角度成正比。
图15
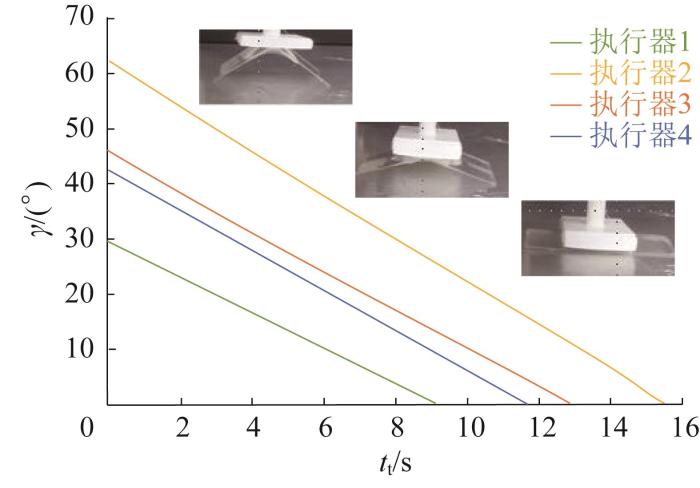
图15
执行器末端与地面夹角变化曲线
Fig.15
Variation curves of angle between actuator end and ground
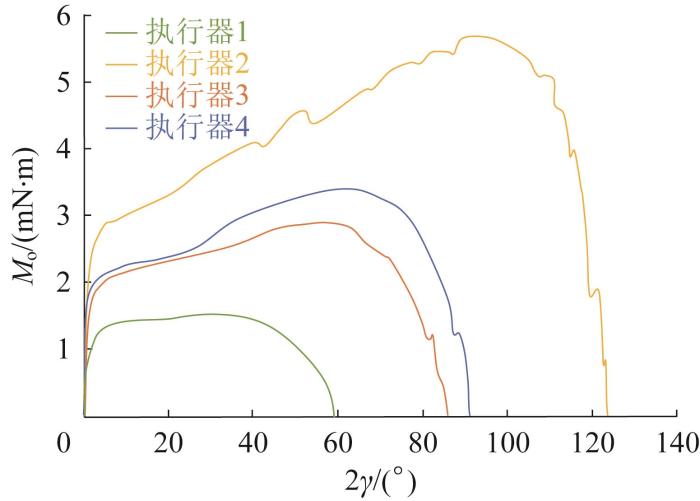
根据F和γ,经过计算得出执行器输出力矩Mo,如图16所示,其中弯曲角度为2γ。由图可知:在执行器从临界状态向稳态2的变形过程中,随着2γ的增大,Mo先增大后减小;执行器稳态2下的2γ越大,Mo、最大Mo越大。因此,若要获得更大的输出力矩,执行器切换后稳态下的弯曲角度需要更大;同理,若想以较小的输入能量触发稳态的切换,执行器切换前稳态下的弯曲角度则需小。
图16
3 爬行-跳跃机器人设计
3.1 爬行模块设计
将2个执行器作为机器人爬行模块的前、后腿。由于设计的执行器为片状,只需2个执行器即能产生爬行运动。设计的爬行模块如图17所示。
图17
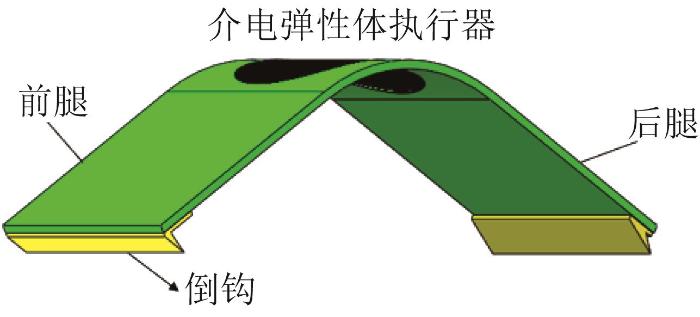
在爬行模块的前、后腿上分别粘上一个3D打印的倒钩结构,使爬行模块有整体向前运动趋势时受到的摩擦力小于有整体向后运动趋势时受到的摩擦力。倒钩结构能够使执行器在各向同性的收缩/伸长的运动过程中驱动机器人单向向前运动。
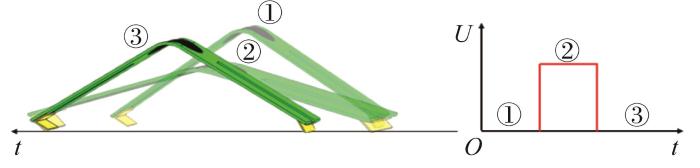
爬行模块的运动过程如图18所示。爬行模块从①到②的过程中,因通电而伸长,弯曲角度变小,后腿向后运动趋势受到的摩擦力大于前腿向前运动趋势受到的摩擦力,且薄膜驱动力小于后腿的最大静摩擦力,因此后腿不动,前腿受到的摩擦力小于薄膜驱动力,前腿向前伸展;从②到③的过程中,模块因断电而缩短,前腿向后运动趋势受到的摩擦力大于后腿向前运动趋势受到的摩擦力,同理前腿不动,后腿往前收回;如此重复,最终爬行模块整体向前运动。
图18
3.2 跳跃模块设计
跳跃模块包括跳跃驱动部分和弹尾,如图19所示。其中跳跃驱动部分为上文设计的执行器,弹尾通过3D打印制作而成。
图19
弹尾的末端设计了一个倒钩,这样能增加地面的反作用力作用在弹尾的时间,提高机器人的初始跳跃速度。
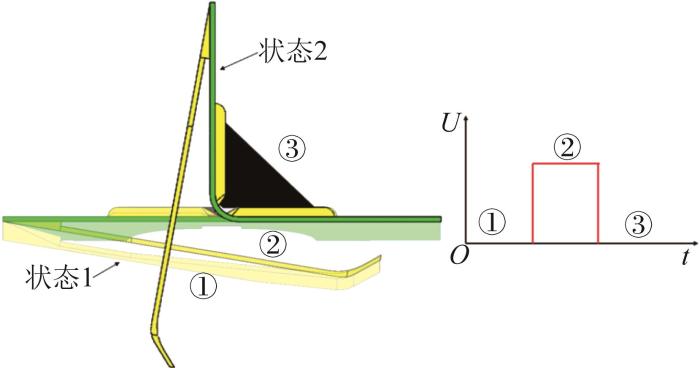
跳跃模块的运动过程如图20所示。跳跃模块从①到②的过程中,通电,则执行器从稳态1向稳态切换临界点变形,弯曲角度减小,执行器末端带着弹尾向上移动,远离地面,到②时跳跃模块积蓄的能量最大;然后断电,跳跃模块从稳态切换临界点向稳态2变形,执行器释放能量,其末端向下旋转,弹尾逐渐接近地面直至撞击地面,地面产生的反作用力作用在模块上,使模块产生跳跃运动。
图20
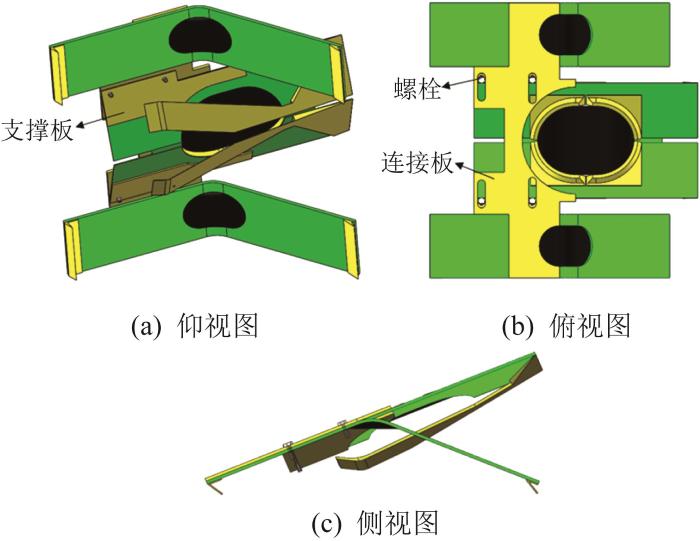
3.3 整体结构设计
所设计的机器人需要实现爬行和跳跃两种运动,且爬行时能实现左转和右转,故将一对爬行模块安装在跳跃模块的两侧,驱动其中的一个爬行模块即能实现转弯。设计的机器人的整体结构如图21所示。跳跃模块执行器的切面与水平面有一定的夹角,模块的连接采用了支撑板、连接板和螺栓。支撑板粘在跳跃模块上,连接板与爬行模块粘接,螺栓与支撑板过盈配合,螺栓与连接板间隙配合,这样爬行模块和跳跃模块通过该3个零件连接在一起。在跳跃模块执行器稳态切换过程中,螺栓在连接板的槽内水平移动。
图21
4 爬行-跳跃机器人的测试
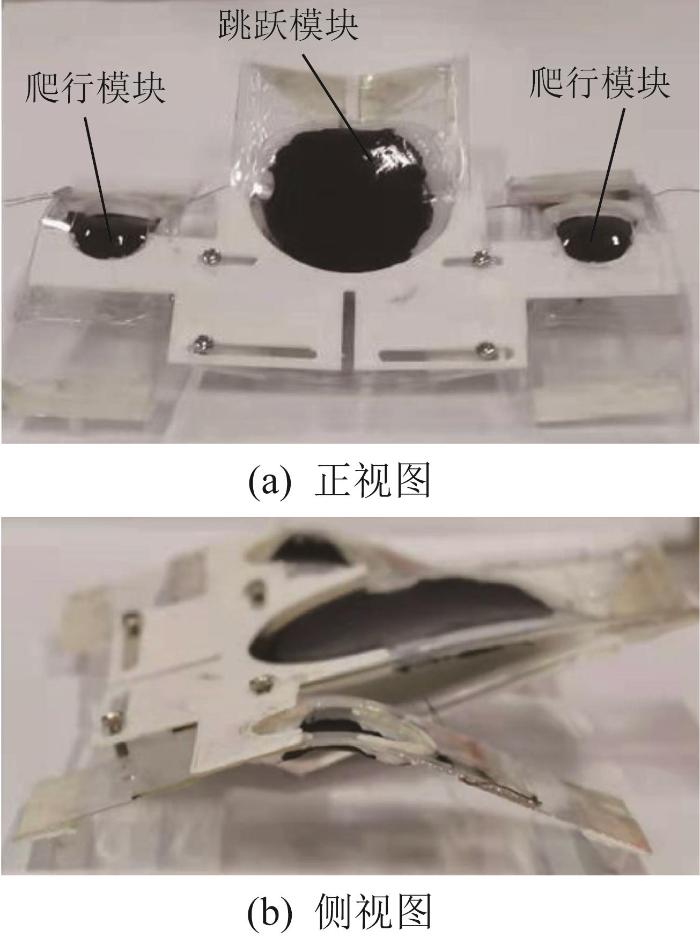
4.1 机器人的制作
制作出爬行-跳跃机器人实物,如图22所示。
图22
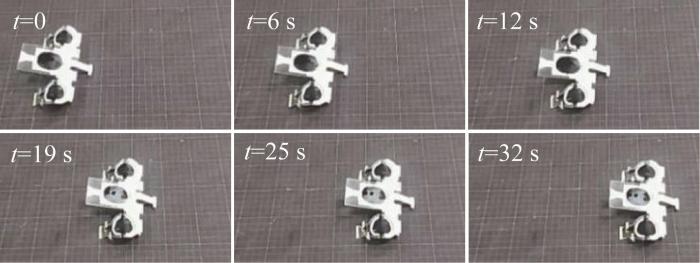
4.2 爬行速度测试
对机器人爬行模块的2个执行器同步输入占空比为50%的方波电压。2个执行器输入的电压U、频率f相同,因此机器人能够直线爬行。当U=6 kV、f=1 Hz时,机器人实现了1 cm/s的直线爬行。其爬行时序图如图23所示。
图23
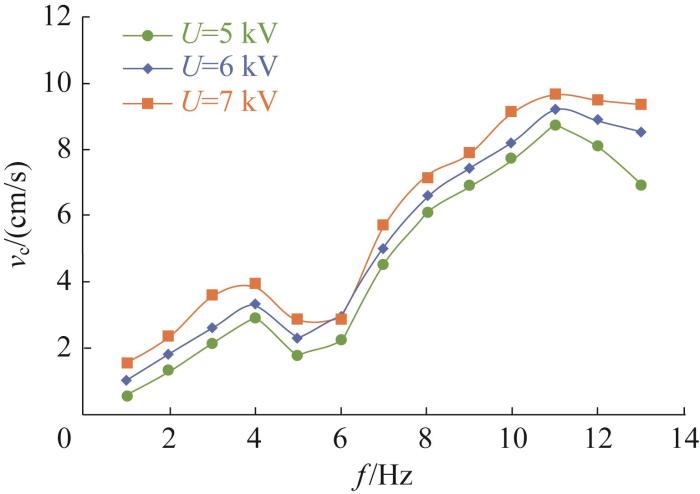
在不同的电压、频率下,进行机器人爬行速度vc的测试,结果如图24所示。由图可知:当f=11 Hz时,vc最大,为10 cm/s,相当于机器人每秒可行进1.25个身长;适当增大U,能够提高vc;f过大会导致爬行模块的执行器在一个周期内的变形不完全,因此vc有所下降。
图24
4.3 转弯速度测试
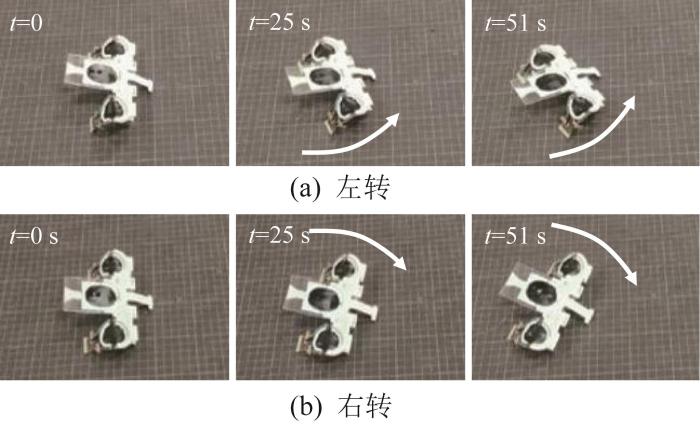
对机器人左侧爬行模型的执行器通入方波电压,右侧不通电,机器人会左转;反之,给机器人右侧爬行模型的执行器通入方波电压,左侧不通电,机器人则会右转。其爬行时序图如图25所示。当U=6 kV、f=1 Hz时,机器人转弯速度ωt=1(°)/s。
图25
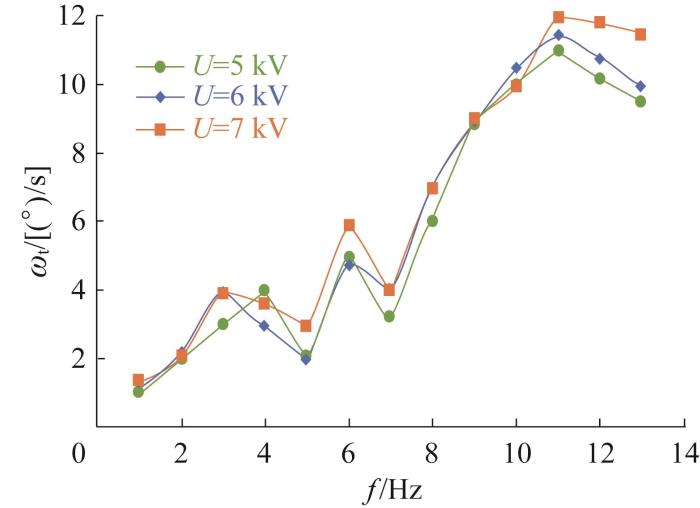
在不同的电压、频率下,进行机器人转速ωt测试,结果如图26所示。由图可知:当f=11 Hz时,ωt最大,为12(°)/s。
图26
4.4 跳跃测试
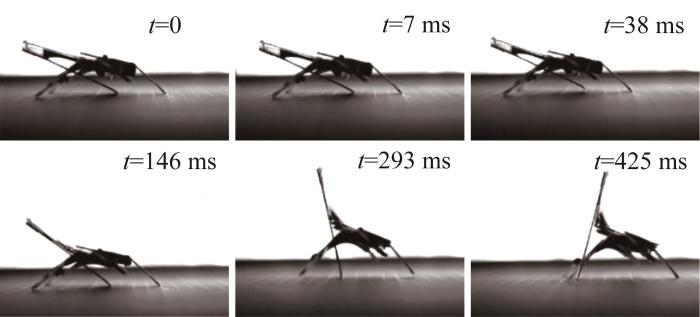
对机器人跳跃模块的执行器输入持续0.5 s的阶跃电压,电压为5.5 kV,用来提供触发稳态切换所需的能量。用高速摄像机记录机器人跳跃运动的状态,结果如图27所示。由图可知:通电后执行器向稳态切换点变形,当t=7 ms时执行器带动弹尾离开地面,然后弹尾远离地面;当t=38 ms时弹尾上升到顶点,此时执行器处于稳态切换的临界点和断电状态,随后其越过临界点向稳态2变形,带动弹尾接近地面;当t=146 ms时弹尾接触地面,t=293 ms时机器人腾空跳跃,t=425 ms时机器人落地。最终,机器人跳跃高度约为5 mm,跳跃距离约为3 cm。
图27
5 结 论
1)笔者设计了一种双稳态介电弹性体执行器,其由介电弹性体膜、柔性电极、加强筋和柔性框架构成,具有横向和纵向两个双稳态。通过分析和试验,确定了执行器的尺寸参数,为机器人的设计奠定了基础。执行器的电极是裸露的,其在不同温度下适应性较广,但当湿度过大时容易产生放电等不良情况,影响使用效果。
2)基于VHB4910介电弹性体膜制作了双稳态介电弹性体执行器,研究了薄膜预拉伸率对执行器动态响应的影响。结果表明:长度方向的预拉伸率越大,稳态2下的弯曲角度越大,稳态1下的弯曲角度越小;宽度方向的预拉伸率越大,稳态1下的弯曲角度越大,稳态2下的弯曲角度越小;稳态下的弯曲角度越大,稳态切换后输出力矩越大。
3)基于介电弹性体执行器,设计了爬行-跳跃机器人。机器人由爬行模块和跳跃模块组成,可实现直行、转弯和跳跃等动作。
4)制作了爬行-跳跃机器人实物并进行了测试。结果表明:当频率为11 Hz时,机器人爬行速度最大,为10 cm/s,相当于每秒行进1.25个身长;机器人的转弯速度也达到最大,为12(°)/s;机器人的跳跃高度约为5 mm,跳跃距离约为3 cm。
参考文献
管道内软体爬行机器人的设计与性能分析
[J/OL].
Design and performance analysis of fast crawling soft pipeline robot
[J].
微小型跳跃机器人: 仿生原理,设计方法与驱动技术
[J].
A review of small-scale jumping robots: bio-mimetic mechanism, mechanical design and actuation
[J].
Autonomous snapping and jumping polymer gels
[J].
微小型跳跃机器人研究现状综述
[J].
Review: research status of miniature jumping robot
[J].DOI:10.3901/jme.2019.15.109 [本文引用: 1]
一种可跳跃的月面移动机器人系统设计
[J].
Design of a lunar mobile robot with jumping ability
[J].
新型轮足跳跃机器人的结构设计及实现
[J].
Structural design and realization of new wheel-footed jumping robot
[J].
电流体泵驱动的柔性弯曲执行器的设计及分析
[J].
Design and analysis of flexible bending actuator driven by electrohydrodynamic pumps
[J].
Self-protection soft fluidic robots with rapid large-area self-healing capabilities
[J].
Powerful UAV manipulation via bioinspired self-adaptive soft self-contained gripper
[J].
Recent development of jumping motions based on soft actuators
[J].
Continuous and programmable photomechanical jumping of polymer monoliths
[J].
In-air fast response and high speed jumping and rolling of a light-driven hydrogel actuator
[J].
Magnetic miniature actuators with six-degrees-of-freedom multimodal soft-bodied locomotion
[J].
Small-scale soft-bodied robot with multimodal locomotion
[J].
Spider-inspired electrohydraulic actuators for fast, soft-actuated joints
[J].
Highly dynamic shape memory alloy actuator for fast moving soft robots
[J].
Bioinspired design of light-powered crawling, squeezing, and jumping untethered soft robot
[J].
介电弹性体驱动器: 从分子、材料到器件
[J].
Dielectric elastomer actuators: molecules, materials, and devices
[J].DOI:10.1360/ssc-2024-0148 [本文引用: 1]
基于液态金属电极卷制态介电弹性体驱动器
[J].
Rolling dielectric elastomer actuator based on liquid metal electrode
[J].
3D-printed high-frequency dielectric elastomer actuator toward insect-scale ultrafast soft robot
[J].
A stretchable soft pump driven by a heterogeneous dielectric elastomer actuator
[J].
Fast-moving soft electronic fish
[J].
Dielectric elastomer actuators with low driving voltages and high mechanical outputs enabled by a scalable ultra-thin film multilayering process
[J].
A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale
[J].
An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators
[J].
A soft jellyfish robot driven by a dielectric elastomer actuator
[J].
Soft wall-climbing robots
[J].
A processable, high-performance dielectric elastomer and multilayering process
[J].
Bistable dielectric elastomer minimum energy structures
[J].
Ultra-compliant liquid metal electrodes with in-plane self-healing capability for dielectric elastomer actuators
[J].
A review on dielectric elastomer actuators, technology, applications, and challenges
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}