介电弹性体驱动的爬行-跳跃机器人研究
Research on crawling-jumping robot driven by dielectric elastomers
介电弹性体驱动的爬行-跳跃机器人研究 |
| 潘锋,阮佳平,唐威,邹俊 |
|
Research on crawling-jumping robot driven by dielectric elastomers |
| Feng PAN,Jiaping RUAN,Wei TANG,Jun ZOU |
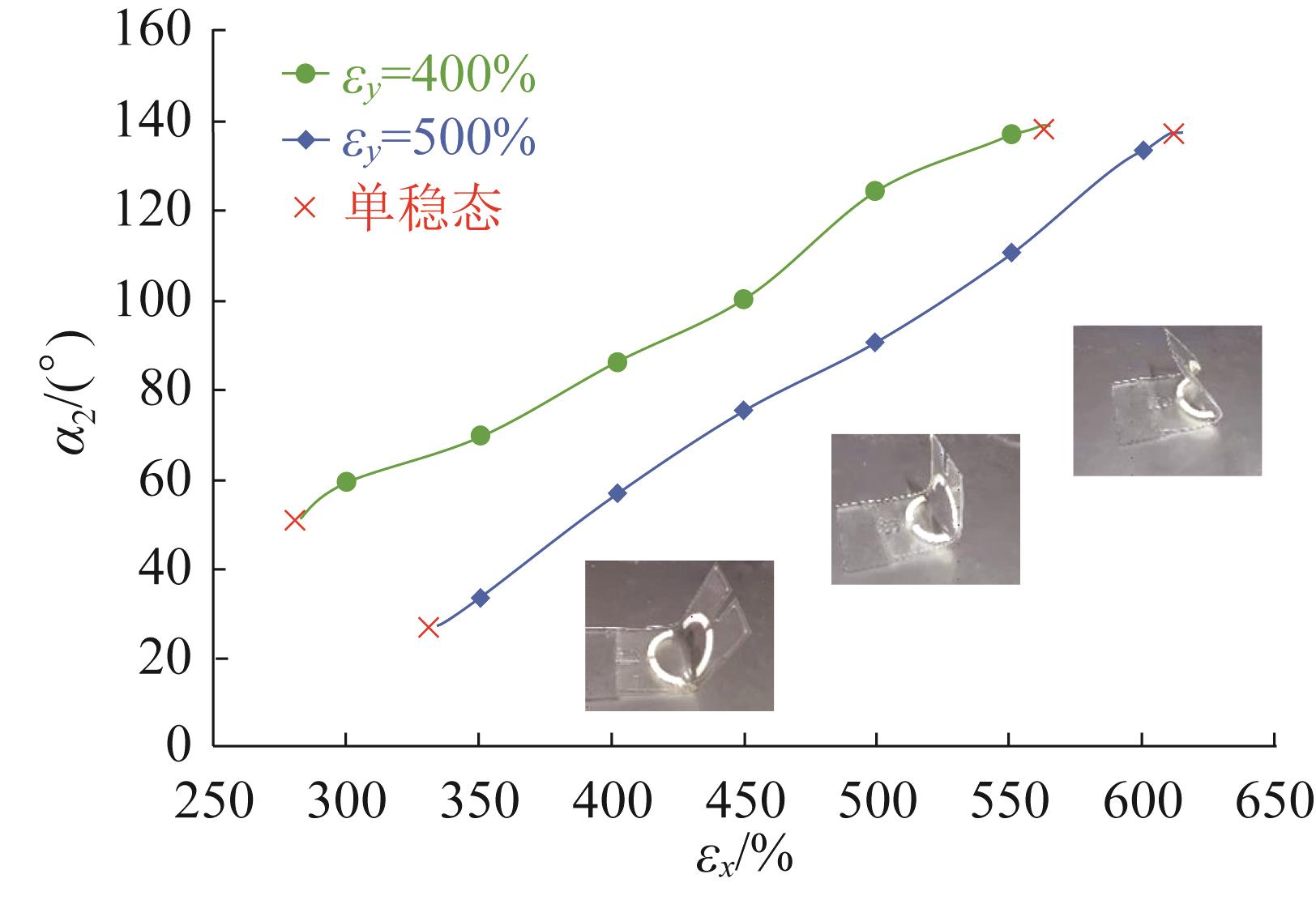
| 图8 介电弹性体膜预拉伸率对执行器稳态2下弯曲角度的影响 |
| Fig.8 Influence of pre-stretching rate of dielectric elastomer membrane on bending angle under steady state 2 of actuator |
|
|