介电弹性体驱动的爬行-跳跃机器人研究
Research on crawling-jumping robot driven by dielectric elastomers
介电弹性体驱动的爬行-跳跃机器人研究 |
| 潘锋,阮佳平,唐威,邹俊 |
|
Research on crawling-jumping robot driven by dielectric elastomers |
| Feng PAN,Jiaping RUAN,Wei TANG,Jun ZOU |
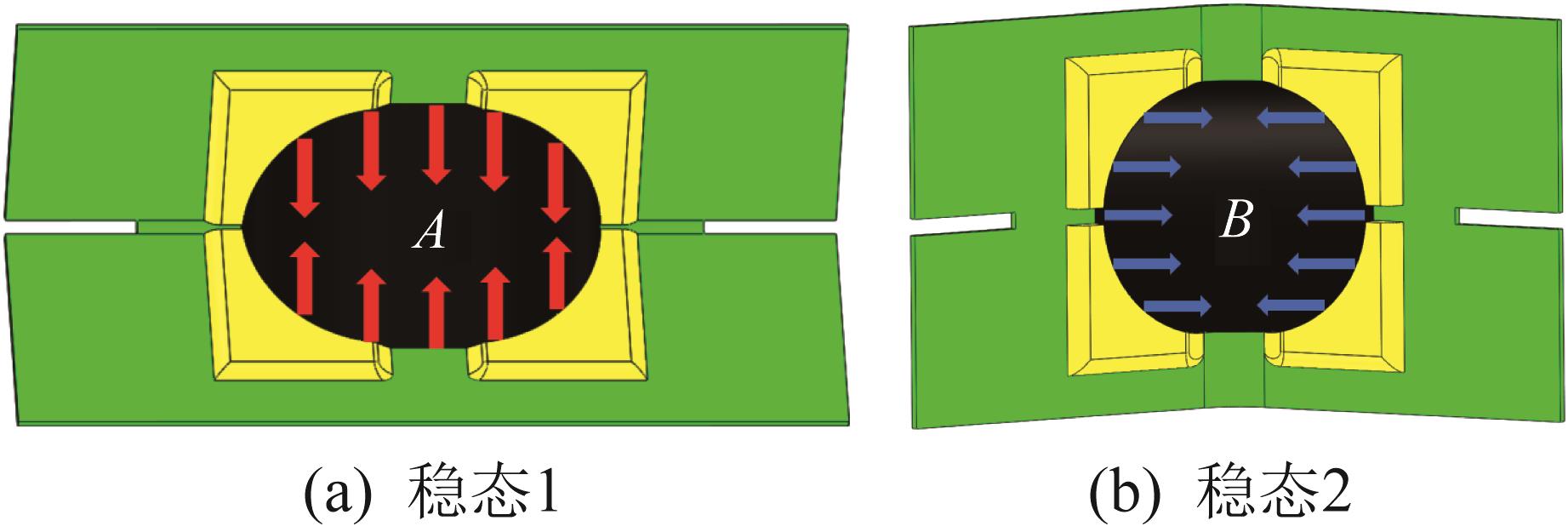
| 图2 执行器2种稳态变形 |
| Fig.2 Two stable deformations of actuator |
|
|