本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.04.121
当火灾、地震等事件发生时,高层建筑中的电梯、管道、通风井等复杂地形使高层抢险救灾工作面临极大的挑战。在高危复杂环境中,通常存在着复杂结构和难以到达的区域,例如倒塌的建筑物、狭小的空间及高危险性的区域。移动机器人可以代替人进入高危环境,进行地形探索、伤员搜寻等工作。然而,复杂的地形导致对机器人的要求很高,机器人须具备墙壁攀爬、地面越障、壁面过渡和狭小空间穿越等多种功能。因此,设计一款面向复杂环境的可变形移动机器人具有重要意义。
目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] 。针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能。刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行。栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕。肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡。
然而,现有的大部分可变形移动机器人可实现的功能较为单一,难以集成多种功能,且其控制系统较为复杂。为此,需要寻找一种控制简单、可变形程度高的结构。张拉整体结构是由一组不连续的受压构件和一组连续的受拉单元组成的能够自支撑的空间网格结构[7 ] ,具有可折展、结构自应力平衡、刚度随预应力而变化等优点。仅控制弹性绳索即可实现结构不同位姿的变化,控制相对简单。已有学者对张拉整体机器人进行了研究[7 -11 ] 。现有张拉整体机器人的应用环境相对单一,其难以满足在高危环境中移动的要求。为此,本文结合负压吸附装置,提出了一种基于张拉整体结构的可变形移动机器人。将张拉整体结构与负压吸附装置相结合,并利用轮驱动实现机器人平面移动越障、水平墙面过渡、竖直墙面爬行及穿越狭小空间等多种功能,可使张拉整体机器人在多复杂场景下移动,扩大其应用范围。
1 基于张拉整体结构的可变形移动机器人的设计
1.1 基于张拉整体结构的可变形躯干设计
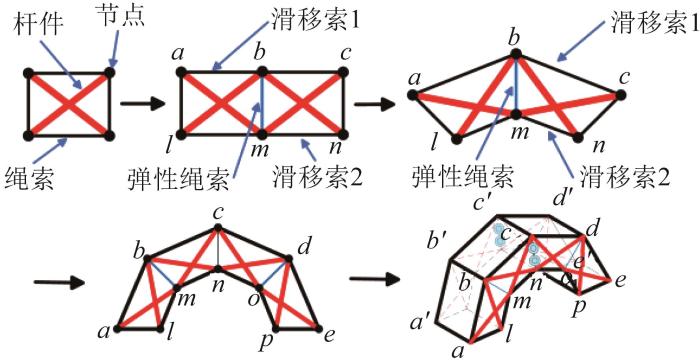
选择经典的二杆四索张拉整体结构作为机器人基本设计单元。机器人可变形躯干的设计如图1 所示。2根刚性杆件与4根柔性绳索按一定规律在节点处相连接,在结构上具有较好的可变形能力;将2个基本设计单元相拼接,根据张拉整体结构的相关概念,节点a 、b 、c 用柔性绳索1连接,节点l 、m n 用柔性绳索2连接,且2根绳索可分别相对节点b m 产生滑动,如此形成上下两条滑移索;节点b m 用弹性绳索连接,可驱动上下两条绳索实现其长度的变化,使由2个基本设计单元相拼接的构型实现弯曲变形,但构型在极限弯曲位置上仍有一定的局限性;选择4个基本设计单元相拼接,以满足结构的弯曲变形要求;为了保证机器人的运动稳定性及弯曲过程中的刚性,将其躯干部分设计为双层张拉整体结构,形成可变形躯干。
图1
图1
机器人可变形躯干设计示意
Fig.1
Design schematic of robot deformable body
1.2 吸附装置设计
因吸附装置自身结构的限制,磁吸附、仿生吸附、钩爪吸附等吸附方式均存在对墙面要求高、结构设计困难等缺点[12 ] ,故选择能够适应较多的墙面场景、装置结构的设计相对简单的负压吸附方式进行分析。
1.2.1 机器人极限位姿受力分析
当机器人吸附于墙面时,确保其安全至关重要。为此,需要对机器人进行受力分析。通过计算和模拟,来分析机器人在吸附状态下所受的力和压力分布,并确保其在设计范围内。
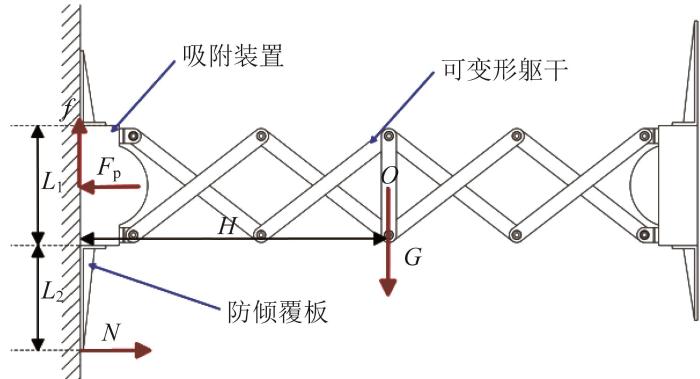
机器人可变形躯干拉伸至极限长度时,对吸附装置的受力最大。墙面上机器人极限位姿受力分析如图2 所示。
图2
图2
墙面上机器人极限位姿受力分析
Fig.2
Force analysis of limit pose of robot on wall surface
将2个吸附装置对称布置在机器人可变形躯干两侧。整个机器人的质心位于其处于悬臂状态时的中心位置O 点。因机器人处于悬臂状态时长度较大,为了避免由力矩引起的对吸附装置所需产生的吸附力要求过大,在负压仓侧面增添防倾覆板来削弱力矩的影响。在机器人单侧吸附的静止状态下,其整体力学平衡方程为:
f - G = 0 (1)
F p - N = 0 (2)
F p × L 1 2 + L 2 - G × H = 0 (3)
式中:f 为负 压仓 所受 的静 摩擦 力 G F p N L 1 为吸附装置长度,L 2 为下侧防倾覆板长度,H 为悬臂状态下机器人中心点到墙面的距离。
F p ≥ m a x 2 G H L 1 + 2 L 2 (4)
1.2.2 负压吸附装置结构设计
考虑机器人在墙面的移动方式,移动机构采用驱动速度快、墙面适应性强的轮驱动方式。驱动轮由2个小型直流电机驱动。
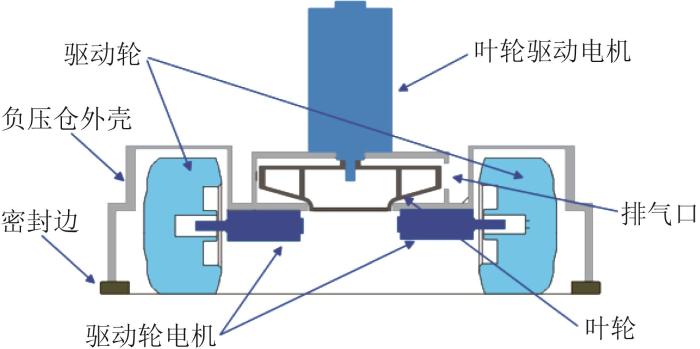
考虑负压吸附的合理性,将叶轮放置在吸附装置的中心位置;高速直流电机倒置固定在叶轮架上,与叶轮相连;2个驱动轮对称布置在负压仓内部。负压吸附装置的结构如图3 所示。
图3
图3
负压吸附装置的结构
Fig.3
Structure of negative pressure adsorption device
1.3 机器人整体结构
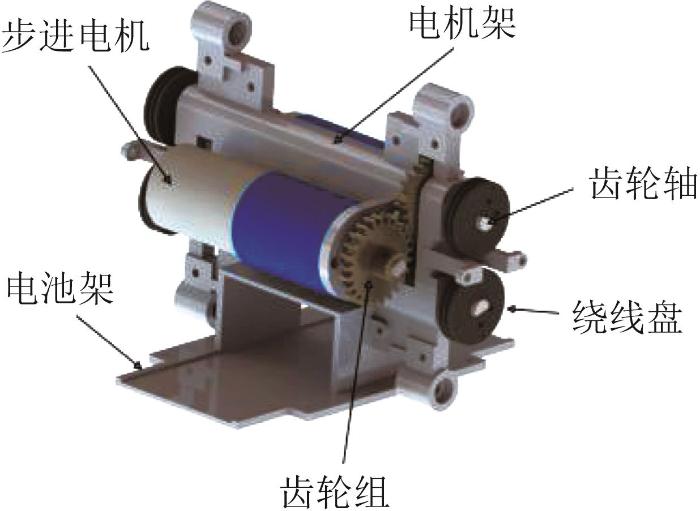
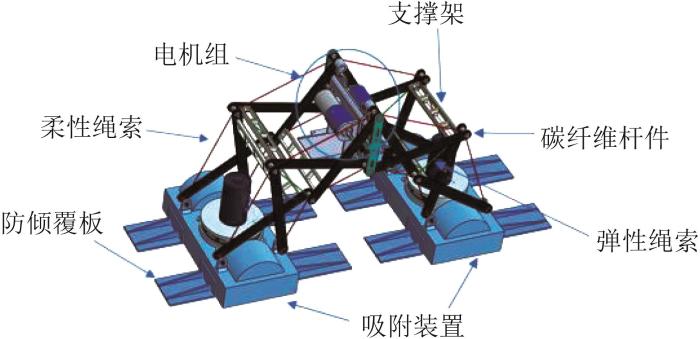
在可变形躯干的中间位置放置用于控制绳索的电机组。电机组的组成如图4 所示。在可变形躯干的两端连接吸附装置,则机器人的整体结构如图5 所示。电机型号及参数如表1 所示。
图4
图4
电机组的组成
Fig.4
Composition of generator set
图5
图5
可变形移动机器人整体结构
Fig.5
Overall structure of deformable mobile robot
2 机器人运动学建模及步态规划
2.1 机器人运动学建模
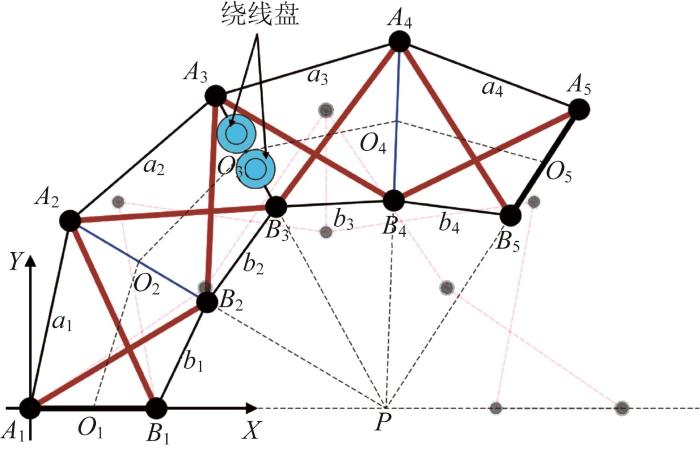
机器人由双层张拉整体结构构成,且为对称布局,其简化构型如图6 所示。简化后,构型尺寸不变,且运动与原模型一致。以构型图中机器人机架节点A 1 为原点,建立平面直角坐标系A 1 -XY ,X 方向为水平向右,Y 方向为竖直向上,Oi (i =1, 2, …, 5)分别为Ai Bi 的中点。在此基础上,机器人的运动位姿可由坐标点O 5 表示。
图6
图6
可变形移动机器人简化构型
Fig.6
Simplified configuration of deformable mobile robot
张拉整体结构中各个节点之间的柔性绳索所受轴向力大小相等,因此机器人基本单元上或下的绳索长度相同,即:
a i = l a + φ a R a 4 (5)
b i = l b + φ b R b 4 (6)
式中:ai 和bi (i =1, …, 4)分别为上、下两条柔性绳索相邻节点之间的长度;la 和lb 分别为上、下两条柔性绳索的初始长度;φa 和φb 分别为上、下两侧步进电机的输入角度;Ra 和Rb 分别为上、下两个绕线盘的半径。
由式(5)和式(6)可知,当驱动绕线盘的步进电机的输入角度一定时,相邻节点之间的柔性绳索的长度随之确定。
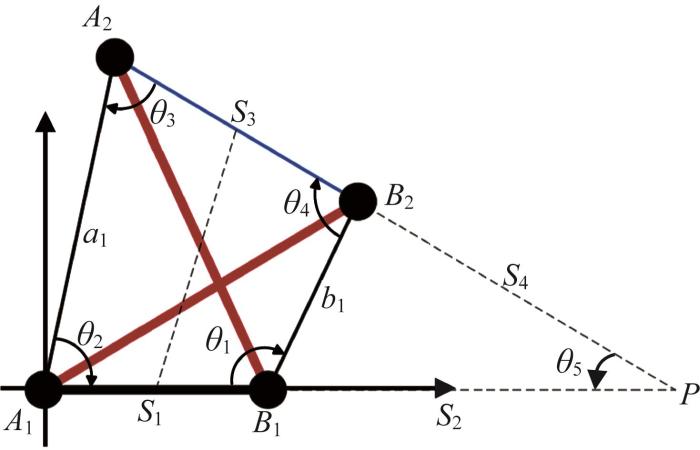
机器人简化单元如图7 所示,分析四边形A 1 B 1 B 2 A 2 及其与延长线交点P 之间的几何关系。图中:A 1 B 1 为机器人机架,长度为s 1 ,为定值;A 2 B 2 的长度为s 3 ;s 2 、s 4 分别为点B 1 、B 2 到P 的距离;A 1 B 2 、A 2 B 1 为机器人结构杆,其长度均为d 。
图7
图7
可变形移动机器人简化单元
Fig.7
Simplified unit of deformable mobile robot
r B 1 A 1 + r A 1 B 2 + r B 2 B 1 = 0 r B 1 A 1 + r A 1 A 2 + r A 2 B 1 = 0 r B 2 A 1 + r A 1 A 2 + r A 2 B 2 = 0 r P B 1 + r B 1 B 2 + r B 2 P = 0 (7)
由式(5)和式(6),可将绳索间的夹角θi 及s 2 、s 3 分别表示为:
θ i = t g - 1 1 - f i 2 f i 2 ( i = 1 , 2 , 3 ) θ 4 = 2 π - ∑ i = 1 3 t g - 1 1 - f i 2 f i 2 θ 5 = π - ∑ i = 2 3 t g - 1 1 - f i 2 f i 2 s 2 = b 1 s i n θ 4 s i n θ 5 s 3 = s 1 2 + a 1 2 + b 1 2 - 2 s 1 b 1 f 1 + a 1 f 2 + 2 a 1 b 1 f 1 2 + f 2 2 - 1 f 1 f 2 + 1 - f 1 2 + f 2 2 + f 1 2 f 2 2 (8)
f 1 = s 1 2 + b 1 2 - d 2 2 s 1 b 1
f 2 = s 1 2 + a 1 2 - d 2 2 s 1 a 1
f 3 = s 3 2 + a 1 2 - d 2 2 s 3 a 1
已知O 5 为机架A 5 B 5 的中点,A 3 B 3 、A 5 B 5 均为机架且其长度与A 1 B 1 的长度相等。由图6 所示机器人的构型及张拉整体结构的特性可知,B 1 到P 的距离s 2 与B 5 到P 的距离s B 5 P O 5 到P 的距离s O 5 P
s O 5 P = s B 5 P + s 1 2 (9)
X O 5 = f φ a , φ b Y O 5 = g φ a , φ b (10)
f φ a , φ b = 2 s 1 s i n θ 5 + 2 b 1 s i n θ 4 - s 1 s i n θ 5 c o s 4 θ 5 -
2 b 1 s i n θ 4 c o s 4 θ 5 / ( 2 s i n θ 5 )
g φ a , φ b = 1 2 s 1 s i n 4 θ 5 + 4 b 1 s i n θ 4 c o s θ 5 - c o s 2 θ 5
2.2 机器人步态规划
定义用于吸附足1的高速直流电机的状态为m 1 ,吸附足2的高速直流电机的状态为m 2 ;吸附足1的驱动轮电机的状态为n 1 ,吸附足2的驱动轮电机的状态为n 2 。高速直流电机和驱动轮电机均匀速转动,当m 1 、m 2 、n 1 、n 2 为1时,表示该电机工作;为0时,表示电机不工作。
2.2.1 机器人从水平地面攀爬到竖直墙面
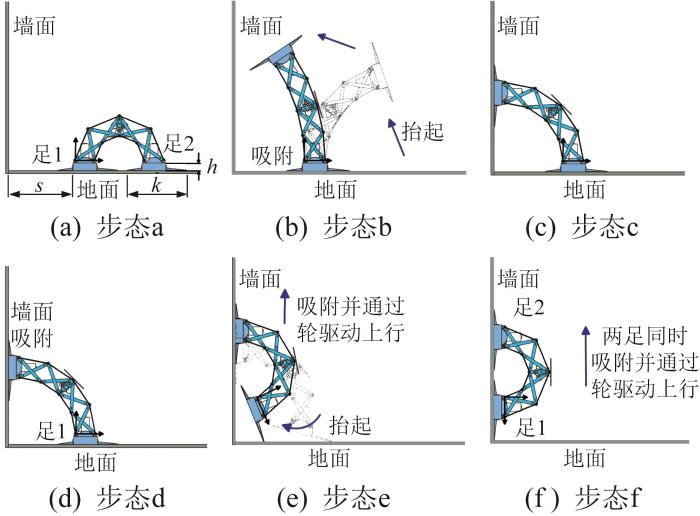
机器人从水平地面攀爬到竖直墙面的步态序列如图8 所示。图中:“→”表示机器人足运动方向;机器人足高为h ,长为k ;A 1 到墙面的距离为s ;机器人构型中设定的A 1 - XY 坐标系随机器人的移动而移动,与机器人保持相对静止。机器人不同步态所对应的参数如表2 所示。
图8
图8
机器人从水平地面攀爬到竖直墙面的步态序列
Fig.8
Gait sequence of robot climbing from horizontal ground to vertical wall surface
根据运动学规律,将表2 数据代入式(10),可求得机器人从水平地面攀爬到竖直墙面的过渡步态中步进电机输入转角的变化范围。当φa 、φb >0时,表示电机正转;当φa 、φb <0时,表示电机反转。
- 4 l a - 4 A a R a ≤ φ a ≤ 0 0 ≤ φ b ≤ 4 l a - 4 A b R b (11)
- l a + l b + 4 l a - 4 A a R a ≤ φ a ≤ - 4 l a - 4 A d R a 4 l a - 4 A b R b ≤ φ b ≤ l a - l b - 4 l a - 4 A b R b (12)
A a = s 1 2 + d 2 + 2 s 1 s - h - 2 s 1 s - h c o s θ 5 2 - C 1 A b = d 2 - s 1 2 - 2 s 1 s - h + 2 s 1 s 1 + s - h c o s θ 5 2 + C 2
C 1 = 2 s 1 s - h 2 c o s θ 5 2 - s - h 2 + d 2 c o s θ 5
C 2 = 2 s 1 s 1 + s - h 2 c o s θ 5 2 - s 1 + s - h 2 + d 2 c o s θ 5
式(11)为机器人从步态a到步态d的过程中电机转角范围,式(12)为机器人从步态d到步态f的过程中电机转角范围。
2.2.2 机器人从竖直墙面穿越狭小空间
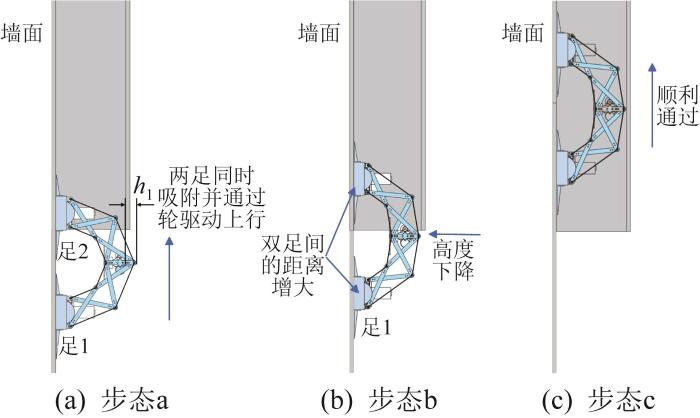
机器人从竖直墙面穿越狭小空间的步态序列如图9 所示,不同步态所对应的参数如表3 所示。
图9
图9
机器人从竖直墙面穿越狭小空间的步态序列
Fig.9
Gait sequence of robot traversing narrow space from vertical wall surface
当2个步进电机驱动绕线盘使得两侧绳索均处于放松状态时,上下两条柔性绳索均不产生约束力。足1的驱动轮不工作,足1保持不动,足2的驱动轮向上移动,使得两足之间产生位移,柔性绳索拉伸,进而使机器人的高度降低,其顺利穿越狭小空间。
2.2.3 机器人从水平地面翻越上台阶
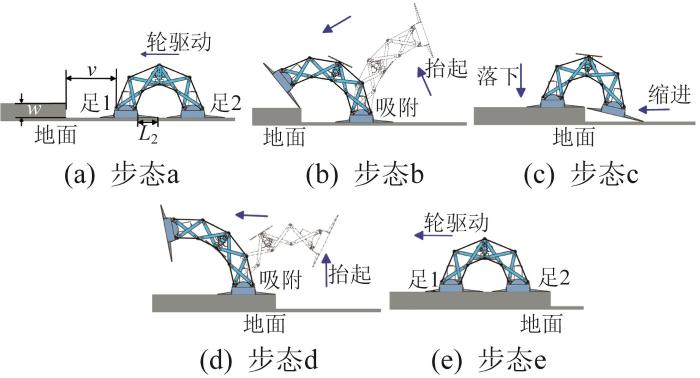
机器人从水平地面翻越上台阶的步态序列如图10 所示,不同步态所对应的参数如表4 所示。
图10
图10
机器人从水平地面翻越上台阶的步态序列
Fig.10
Gait sequence of robot flipping up steps from horizontal ground
根据运动学规律,将表4 数据代入式(10),可求得机器人从水平地面翻越上台阶的步态中步进电机输入转角的变化范围。
- 4 l a - 4 B a R a ≤ φ a ≤ 0 - 4 B b - 4 l a R b ≤ φ b ≤ 0 (13)
0 ≤ φ a ≤ 4 l a - 4 B a R a 0 ≤ φ b ≤ 4 B b - 4 l a R b (14)
B a = s 1 2 + d 2 + 2 s 1 L 2 - 2 s 1 L 2 c o s θ 5 2 - C 3
B b = d 2 - s 1 2 - 2 s 1 L 2 + 2 s 1 s 1 + L 2 c o s θ 5 2 + C 4
C 3 = 2 s 1 L 2 2 c o s θ 5 2 - L 2 2 + d 2 c o s θ 5
C 4 = 2 s 1 s 1 + L 2 2 c o s θ 5 2 - s 1 + L 2 2 + d 2 c o s θ 5
式(13)为机器人从步态a到步态c的过程中电机转角范围,式(14)为机器人从步态c到步态e的过程中电机转角范围。
3 实验验证
3.1 机器人从水平地面攀爬到竖直墙面的实验
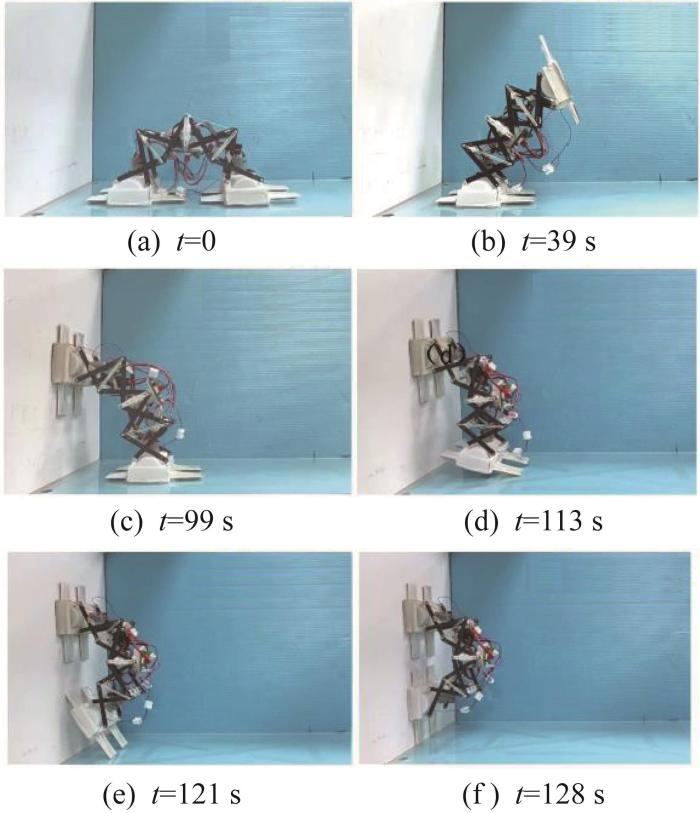
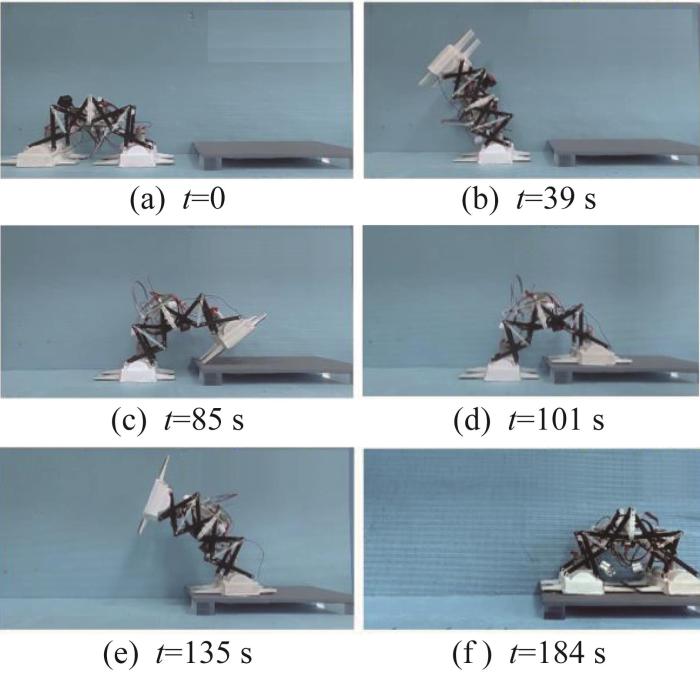
机器人从水平地面攀爬到竖直墙面的实验如图11 所示。实验中,地面为亚克力板平面,墙面为白色乳胶漆壁面,机器人左侧足距墙面105 mm。机器人整体攀爬过程与步态规划一致,可顺利完成过渡步态。
图11
图11
机器人从水平地面攀爬到竖直墙面的实验
Fig.11
Experiment of robot climbing from horizontal ground to vertical wall surface
3.2 机器人从竖直墙面穿越狭小空间的实验
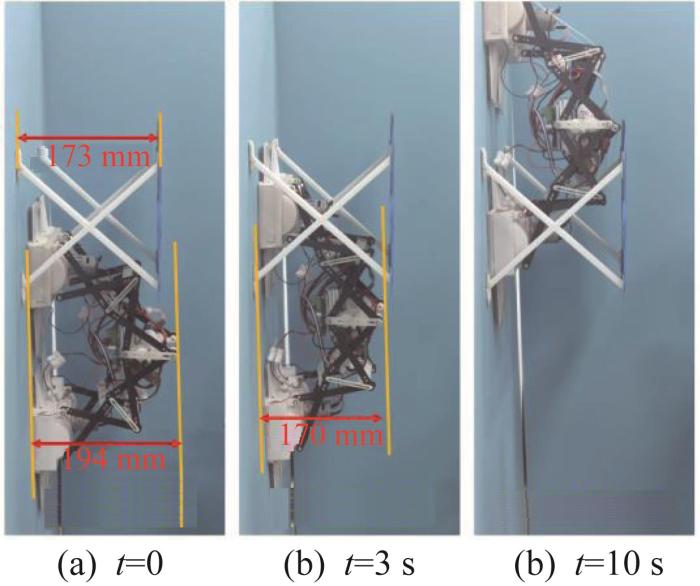
机器人从竖直墙面穿越狭小空间的实验如图12 所示。实验中,墙面为普通蓝色壁纸面,狭小空间的高度为173 mm,机器人顶端高度为194 mm。机器人整体穿越过程与步态规划一致,可顺利通过墙面狭小空间。
图12
图12
机器人从竖直墙面穿越狭小空间的实验
Fig.12
Experiment of robot traversing narrow space from vertical wall surface
3.3 机器人从水平地面翻越上台阶的实验
机器人从水平地面翻越上台阶的实验如图13 所示。实验中,台阶高度为35 mm,机器人前端足距离台阶55 mm。机器人整体翻越上台阶的过程与步态规划一致,可顺利翻越上台阶。
图13
图13
机器人从水平地面翻越上台阶的实验
Fig.13
Experiment of robot flipping up steps from horizontal ground
4 结 论
1)作者将张拉整体可变形结构与负压吸附装置相结合,基于吸附力及结构参数的分析,成功设计了一款可应用于水平及竖直墙面等多场景且无系留的可变形移动机器人。
2)建立了机器人运动学模型,获得了机器人位姿与电机转角的映射关系以及机器人的3种运动步态。
3)研制了机器人样机,并进行了机器人3种步态的实验测试。实验结果表明,机器人具备墙面过渡、穿越狭小空间、翻转越障的能力,可以应对多种复杂的危险环境。本研究为多功能移动机器人的设计与制造提供了一定的参考价值。
参考文献
View Option
[1]
[本文引用: 1]
WANG Y ZHANG X J ZHANG M L et al Design and analysis of split-flexible wall-climbing robot with adaptive variable curvature facade
[J]. Journal of Mechanical Engineering , 2021 , 57 (3 ): 49 -58 .
DOI:10.3901/jme.2021.03.049
[本文引用: 1]
[2]
GUO W ZHONG M LI M et al Design of a six legged wall-climbing robot
[C]//2008 IEEE Workshop on Advanced Robotics and Its Social Impacts , Taipei, Taiwan, China, Oct. 17 , 2008 .
[本文引用: 1]
[5]
栗晋杰 灾害现场环境下被动自适应机器人运动学分析
[D].天津 :河北工业大学 ,2014 .
[本文引用: 1]
LI J J Passive adaptive robot kinematics analysis under the disaster site circumstance
[D]. Tianjin : Hebei University of Technology , 2014 .
[本文引用: 1]
[7]
FURUYA H Concept of deployable tensegrity structures in space application
[J]. International Journal of Space Structures , 1992 , 7 (2 ): 143 -151 .
[本文引用: 2]
[8]
SHIBATA M HIRAI S Rolling Locomotion of deformable tensegrity structure
[EB/OL].[2024-03-07 ]..
URL
[9]
CHUNG Y S LEE J H JANG J H et al Jumping tensegrity robot based on torsionally pre-strained SMA springs
[J]. ACS Applied Materials & Interfaces , 2019 , 11 (43 ): 40793 -40799 .
[10]
BÖHM V ZIMMERMANN K Vibration-driven mobile robots based on single actuated tensegrity structures
[C]//IEEE International Conference on Robotics and Automation , Karlsruhe, Germany, May 6 , 2013 .
[11]
CHEN B JIANG H Swimming performance of a tensegrity robotic fish
[J]. Soft Robotics , 2019 , 6 (4 ): 520 -531 .
[本文引用: 1]
爬壁机器人的研究现状与发展趋势
1
2021
... 因吸附装置自身结构的限制,磁吸附、仿生吸附、钩爪吸附等吸附方式均存在对墙面要求高、结构设计困难等缺点[12 ] ,故选择能够适应较多的墙面场景、装置结构的设计相对简单的负压吸附方式进行分析. ...
爬壁机器人的研究现状与发展趋势
1
2021
... 因吸附装置自身结构的限制,磁吸附、仿生吸附、钩爪吸附等吸附方式均存在对墙面要求高、结构设计困难等缺点[12 ] ,故选择能够适应较多的墙面场景、装置结构的设计相对简单的负压吸附方式进行分析. ...
可自适应变曲率立面的分体柔性爬壁机器人设计与分析
1
2021
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
可自适应变曲率立面的分体柔性爬壁机器人设计与分析
1
2021
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
Design of a six legged wall-climbing robot
1
2008
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种新型爬壁机器人越障过程的运动及动力学分析
1
2019
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种新型爬壁机器人越障过程的运动及动力学分析
1
2019
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种仿尺蠖爬壁机器人设计与分析
1
2019
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种仿尺蠖爬壁机器人设计与分析
1
2019
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
灾害现场环境下被动自适应机器人运动学分析
1
2014
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
灾害现场环境下被动自适应机器人运动学分析
1
2014
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种双体负压吸附爬壁机器人的研究
1
2018
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
一种双体负压吸附爬壁机器人的研究
1
2018
... 目前,科研人员对可变形移动机器人展开了广泛研究,并取得了一定进展[1 -2 ] .针对墙面的复杂环境,特别是凸起、交叉壁面,杨春等[3 ] 设计了一款串联式爬壁机器人,其利用腿足间关节的运动实现越障、调节位姿等功能.刘彦伟等[4 ] 仿照尺蠖的运动模式,设计了一款爪刺足式爬壁机器人,其利用双足的交替运动实现墙面爬行.栗晋杰[5 ] 研制了一款被动自适应的可变形机器人,其能够跨越凸台、斜坡和沟壕.肖世贵等[6 ] 研制了一款负压双体吸附的爬壁机器人,其利用舵机实现2个吸附装置之间的变形,实现壁面间的过渡. ...
Concept of deployable tensegrity structures in space application
2
1992
... 然而,现有的大部分可变形移动机器人可实现的功能较为单一,难以集成多种功能,且其控制系统较为复杂.为此,需要寻找一种控制简单、可变形程度高的结构.张拉整体结构是由一组不连续的受压构件和一组连续的受拉单元组成的能够自支撑的空间网格结构[7 ] ,具有可折展、结构自应力平衡、刚度随预应力而变化等优点.仅控制弹性绳索即可实现结构不同位姿的变化,控制相对简单.已有学者对张拉整体机器人进行了研究[7 -11 ] .现有张拉整体机器人的应用环境相对单一,其难以满足在高危环境中移动的要求.为此,本文结合负压吸附装置,提出了一种基于张拉整体结构的可变形移动机器人.将张拉整体结构与负压吸附装置相结合,并利用轮驱动实现机器人平面移动越障、水平墙面过渡、竖直墙面爬行及穿越狭小空间等多种功能,可使张拉整体机器人在多复杂场景下移动,扩大其应用范围. ...
... [7 -11 ].现有张拉整体机器人的应用环境相对单一,其难以满足在高危环境中移动的要求.为此,本文结合负压吸附装置,提出了一种基于张拉整体结构的可变形移动机器人.将张拉整体结构与负压吸附装置相结合,并利用轮驱动实现机器人平面移动越障、水平墙面过渡、竖直墙面爬行及穿越狭小空间等多种功能,可使张拉整体机器人在多复杂场景下移动,扩大其应用范围. ...
Rolling Locomotion of deformable tensegrity structure
0
Jumping tensegrity robot based on torsionally pre-strained SMA springs
0
2019
Vibration-driven mobile robots based on single actuated tensegrity structures
0
6
Swimming performance of a tensegrity robotic fish
1
2019
... 然而,现有的大部分可变形移动机器人可实现的功能较为单一,难以集成多种功能,且其控制系统较为复杂.为此,需要寻找一种控制简单、可变形程度高的结构.张拉整体结构是由一组不连续的受压构件和一组连续的受拉单元组成的能够自支撑的空间网格结构[7 ] ,具有可折展、结构自应力平衡、刚度随预应力而变化等优点.仅控制弹性绳索即可实现结构不同位姿的变化,控制相对简单.已有学者对张拉整体机器人进行了研究[7 -11 ] .现有张拉整体机器人的应用环境相对单一,其难以满足在高危环境中移动的要求.为此,本文结合负压吸附装置,提出了一种基于张拉整体结构的可变形移动机器人.将张拉整体结构与负压吸附装置相结合,并利用轮驱动实现机器人平面移动越障、水平墙面过渡、竖直墙面爬行及穿越狭小空间等多种功能,可使张拉整体机器人在多复杂场景下移动,扩大其应用范围. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}