基于张拉整体结构的可变形移动机器人的设计与实验研究
Design and experimental research of deformable mobile robot based on tensegrity structure
基于张拉整体结构的可变形移动机器人的设计与实验研究 |
| 张淏,杨琪,连宾宾,孙涛 |
|
Design and experimental research of deformable mobile robot based on tensegrity structure |
| Hao ZHANG,Qi YANG,Binbin LIAN,Tao SUN |
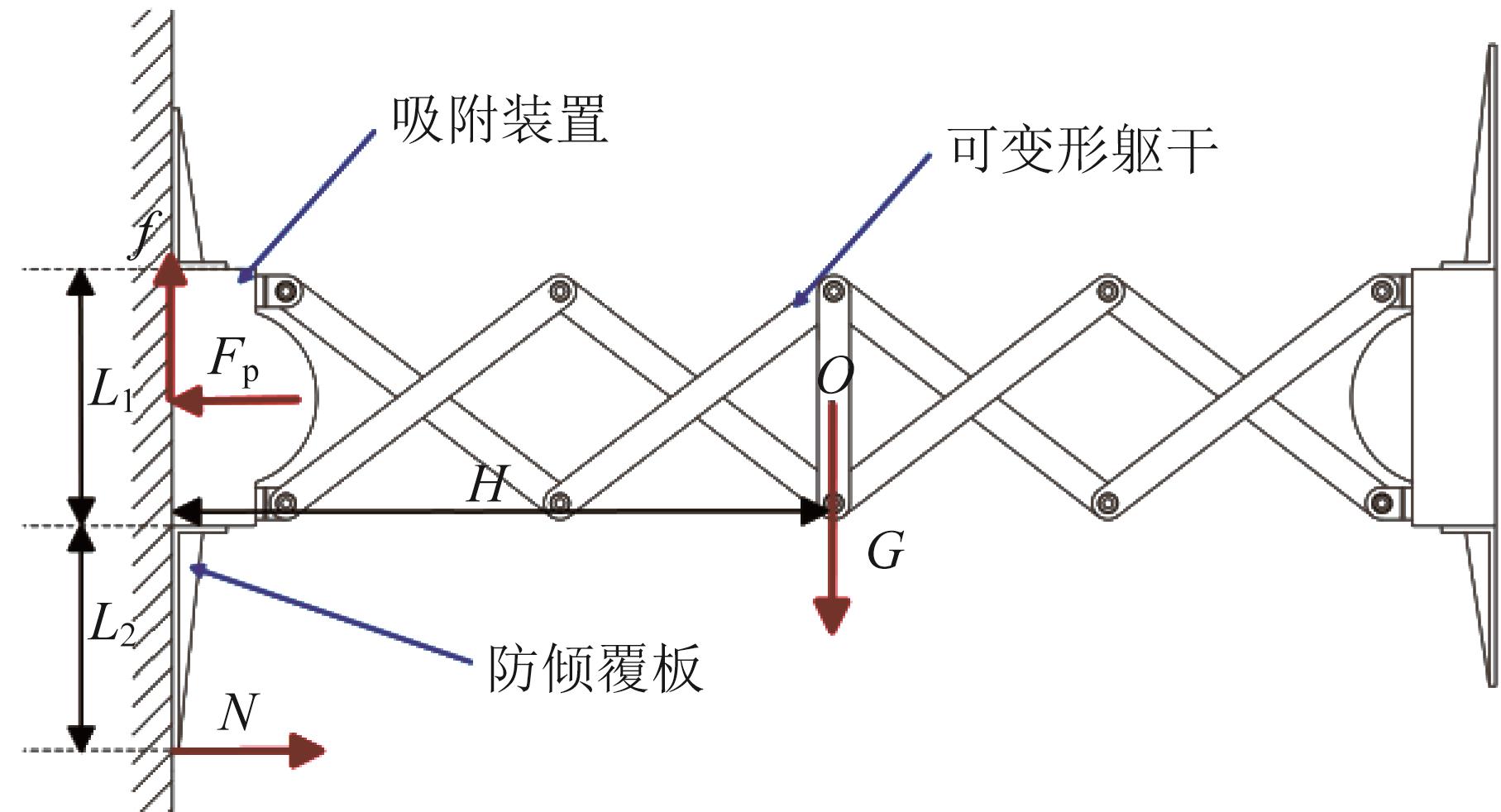
| 图2 墙面上机器人极限位姿受力分析 |
| Fig.2 Force analysis of limit pose of robot on wall surface |
|
|