随着人类向外太空、深海探索,能够代替人类在危险或有害环境中远程作业的遥操作机器人成为热门的研究前沿。相较于普通机器人,遥操作机器人的控制方式从全自主方式转向交互方式,操作者在主端远程向从端发送信号,从端机器人接收信号后完成相应的操作[1 ] 。在未知环境中,遥操作机器人更具有实际应用意义。因此,大量学者参与到遥操作机器人技术的研究开发中。
但是,传统的遥操作机器人仅依靠视觉辅助抓取目标物体,在作业中存在易损坏目标或抓取目标失败等情况。因此,人机交互遥操作机器人应运而生。在遥操作已有特点的基础上,人与机器人交互有助于解决机器人在未知或非确定环境中难以决策和规划的问题,而将机器人与外部环境的交互信息反馈到主端,可协助操作者决策,避免作业时发生意外,保证了作业的高效、精准[2 ] ,同时可实现在人类无法到达的外太空、深海和辐射等恶劣环境中完成作业。在复杂、未知环境中,人机交互技术成为机器人作业的主要方式[1 ] 。
由于传统刚体机器人存在设计过于复杂、自由度有限、无法适应复杂场景及存在危险因素等缺陷,其刚性结构亟须改进。软体机器人由软质材料制成,相较于刚体机器人具有柔软、可连续变形等特点,在抓取软体物体、易碎物体时优势明显,可适应更为复杂、狭小空间中的作业[3 ] 。软体手因具有对复杂场景的适应性以及柔顺性,搭配软体机器人具有广阔的应用前景。
目前,国内外学者已对软体手进行了广泛深入的研究。例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统。这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向。
本文为了提高人机交互遥操作机器人软体从手的前馈控制跟踪精度和反馈控制实时性[8 ] ,通过引入模型预测控制算法,提出了一种主从软体手位置跟踪方法。模型预测控制是一种可实时滚动的控制,将其引入被控对象,可避免建模引起的误差,其在复杂系统实时控制中的应用十分广泛[9 ] 。首先,介绍人机交互遥操作机器人主从软体手控制系统的构成和工作原理;然后,采用假设模态法进行软体手指建模,将位置跟踪问题转换为状态跟踪问题,并引入模型预测控制算法,用于软体手指的位置跟踪,以解决软体从手跟踪软体主手性能差的问题;最后,开展软体从手跟随软体主手抓握目标物体的实验,以验证软体从手跟踪软体主手并实现抓握的可行性。
1 主从软体手控制系统的构成及工作原理
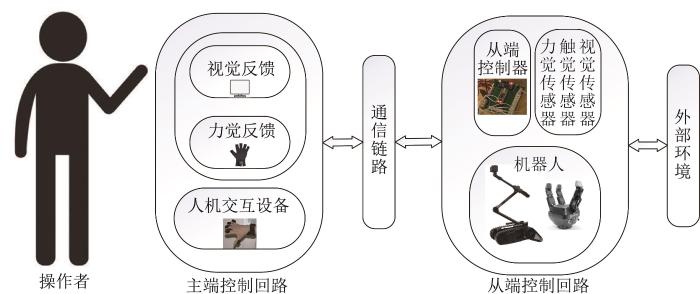
如图1 所示,人机交互遥操作机器人主从软体手控制系统由3个部分构成:主端控制回路、通信链路和从端控制回路[10 ] 。该控制系统的工作原理为:操作者的手通过人机交互设备——软体主手数据手套向控制系统发送指令信号,控制系统接收到信号后将其远程发送至机器人软体从手,软体从手根据控制信号完成相应的动作;在完成动作的过程中,软体从手通过嵌入的力觉传感器与外部环境进行交互,并将相应的压力信息反馈到软体主手数据手套处,人手在感受到这一反馈信息后及时调整动作,以完成目标物体的抓取。
图1
图1
人机交互遥操作机器人主从软体手控制系统的构成及工作原理
Fig.1
Composition and working principle of master-slave soft hand control system for human-computer interactive teleoperation robot
2 软体手指动力学建模
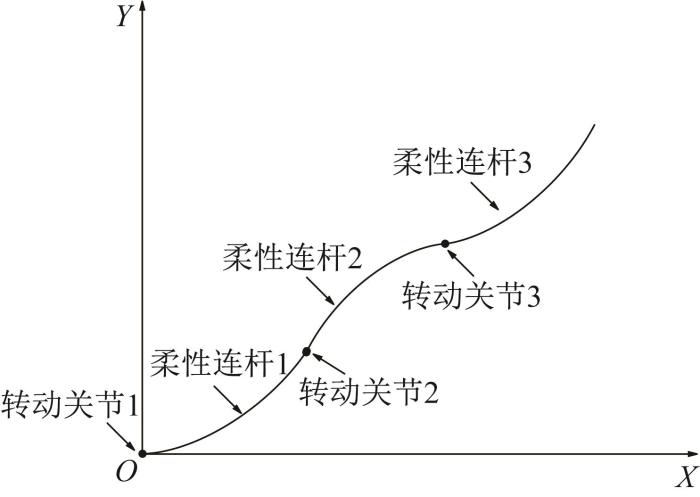
鉴于软体从手各手指的运动方式相同,仅腔室和关节的数量稍有区别,为了简化问题,本文以软体食指的末端位置跟踪为例展开分析。软体食指的三维模型如图2 所示。
图2
图2
软体食指三维模型
Fig.2
Three-dimensional model of soft index finger
采用硅胶制作而成的软体手指因存在易变形的问题,在抓取目标物体时会存在力量不够以及刚度不足的问题。因此,在硅胶软体手指的每个指节处加入固体颗粒来增大刚度。本文在对软体手指进行动力学建模时,将软体手指等效为柔性连杆并采用文献[8 ]中的柔性连杆建模方法。根据图2 所示的软体食指三维模型,将软体食指简化等效为三连杆结构,其中手指弯曲腔段等效为转动关节,指节部分等效为柔性连杆,如图3 所示。
图3
图3
简化的三连杆软体食指
Fig.3
Simplified three-link soft index finger
2.1 基于假设模态法的软体手指建模
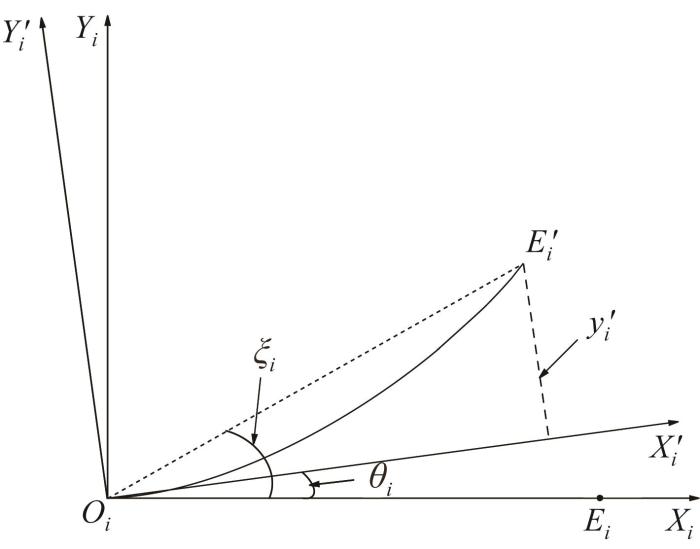
图3 所示的软体食指含有3根柔性连杆,每根连杆的关节位于连杆首端,可驱动连杆整体转动;连杆3的末端,即软体食指整体的末端处于自由状态,只受软体食指自身弯曲的影响。由于柔性连杆的截面积相对于软体食指整体的长度而言很小,以及柔性连杆中均匀嵌入了金属颗粒来增大刚度,且软体食指只在一个平面上作横向弯曲运动,弯曲变形集中在关节处,而柔性连杆的变形较小,故柔性连杆具有Euler-Bernoulli梁特性[11 ] 。忽略重力的作用,软体食指只在二维平面内作弯曲运动,其为一个时变非线性分布参数系统,包含任意个自由度。在Rayleigh-Ritz法基础上产生的假设模态法[12 ] ,通过拉格朗日方程和汉密尔顿原理以及去除高阶模态的方法得到最终的离散动力方程,最适用于本文的软体手指建模。如图4 所示,将原点O i i O i - X i Y i O i - X i ' Y i ' Xi 轴与X i ' θ i i Oi 的连线与Xi 轴之间的夹角为ξ i i x i ' y i ' x i ' , t
图4
图4
软体食指弯曲过程涉及的变量
Fig.4
Variables involved in the bending process of soft index finger
y i ' x i ' , t = ∑ j = 1 m i ϕ i j x i ' δ i j t (1)
式中:m i [13 ] ;ϕ i j x i ' δ i j t
由此可得,某一时刻下θ i 、 ξ i 、 δ i j
ξ i = θ i + y i ' l i l i = θ i + ∑ j = 1 m i ϕ i j l i l i δ i j (2)
取m 1 = m 2 = m 3 = 2
M θ q ¨ + h θ , θ ˙ , δ ˙ + K q + D q ˙ = Q (3)
式中:θ θ = θ 1 θ 2 θ 3 T δ δ = δ 11 δ 12 δ 13 δ 21 δ 22 δ 23 δ 31 δ 32 δ 33 T q q = θ T δ T T τ Q Q = I 3 0 3 × 9 T I 3 为3阶单位矩阵;M h K D
M θ θ θ θ ¨ + M θ δ θ δ ¨ + h θ θ , θ ˙ , δ ˙ = I 3 τ (4)
M θ δ T θ θ ¨ + M δ δ δ ¨ + h δ θ , θ ˙ + K δ δ + D δ = 0 (5)
定义软体食指末端位置偏移向量ξ = ξ 1 ξ 2 ξ 3 T ξ 、 θ δ
ξ = θ + Γ δ (6)
Γ = ϕ 11 / l 1 0 0 ϕ 12 / l 1 0 0 ϕ 13 / l 1 0 0 0 ϕ 21 / l 2 0 0 ϕ 22 / l 2 0 0 ϕ 23 / l 2 0 0 0 ϕ 31 / l 3 0 0 ϕ 32 / l 3 0 0 ϕ 33 / l 3 T (7)
M θ θ ξ - Γ δ ξ ¨ + M θ δ ξ - Γ δ - M θ θ ( ξ - Γ δ ) Γ δ ¨ + h θ ξ - Γ δ , ξ ˙ - Γ δ ˙ , δ ˙ = I 3 τ (8)
M θ δ T ξ - Γ δ ξ ¨ + M δ δ - M θ δ T ( ξ - Γ δ ) Γ δ ¨ +
h δ ( ξ - Γ δ , ξ ˙ - Γ δ ˙ ) + K δ δ + D δ δ ˙ = 0 (9)
式(8)和式(9)即为三连杆软体食指系统的动力学方程,由1个输入变量τ ξ δ
2.2 软体手指末端位置跟踪分析
设在理想状态下软体食指末端轨迹为ξ r , t t ∈ t 0 , t f q t 0 q ˙ t 0 式(8)和式(9)求解力矩τ t ξ t ξ r , t
在理想状态下,仅从初始条件出发,将理想轨迹ξ r , t 式(9)可得到唯一解,而后将ξ r , t δ r , t 式(8),求得最优力矩τ r , t ξ t = ξ r , t 式(9)中δ ¨ ξ r , t δ r , t 0 δ ˙ r , t 0 δ r , t δ t [14 ] 。模型预测控制算法对模型精度的要求不高,且其实时滚动的特点适合在线实时跟踪,故适用于时变非线性系统的建模[15 ] 。采用将力矩求解和最优控制律求解分离的方法来设计模型预测控制器,进而提高整体的运算速度,并通过误差补偿算法来提高运行时的控制精度。
3 软体手指末端位置跟踪控制器设计与仿真
由式(8)和式(9)可知,三连杆软体食指系统的高度非线性导致其动力学方程无法直接计算,故所设计的模型预测控制器也是高度非线性的,且计算量过大导致实时性难以保证。因此,本文结合经典状态反馈和输入-输出线性化并进行简化,设计了新的软体手指末端位置跟踪预测模型。
3.1 软体手指状态预测输出方程
u = ξ (10)
δ ¨ = - M δ δ - M θ δ T Γ - 1 ( M θ δ T u + h δ + K δ δ + D δ δ ˙ ) (11)
将式(10)称为软体食指的外部动态方程,用于表示软体食指的末端位置输出变化;将式(11)称为软体手指的内部动态方程,用于表示软体食指的弹性形变情况。
x k = ξ k δ k ξ ˙ k δ ˙ k T (12)
设采样时间为T ξ t = ξ r , t x k = x r , k x r , k ξ r , k 、 ξ ˙ r , k δ r , k 、 δ ˙ r , k 0 [16 ] 。
使用欧拉积分法将x k 式(10)和式(11)代入,得到x k
x k + 1 = ξ k + 1 δ k + 1 ξ ˙ k + 1 δ ˙ k + 1 = ξ k + T ξ ˙ k + 0.5 T 2 ξ ¨ k δ k + T δ ˙ k + 0.5 T 2 δ ¨ k ξ ˙ k + T ξ ¨ k δ ˙ k + δ ¨ k = T ξ ˙ k - 0.5 T 2 M δ δ - M θ δ T Γ - 1 h δ + K δ δ k 0 - T M δ δ - M θ δ T Γ - 1 h δ + K δ δ k + 0 - 0.5 T 2 M δ δ - M θ δ T Γ - 1 D δ δ ˙ k 0 - T M δ δ - M θ δ T Γ - 1 D δ δ ˙ k + ξ k δ k + T δ ˙ k ξ ˙ k δ ˙ k + 0.5 T 2 I 3 - 0.5 T 2 M δ δ - M θ δ T Γ - 1 M θ δ T T I 3 - T M δ δ - M θ δ T Γ - 1 M θ δ T u k (13)
令Λ = - M δ δ - M θ δ T Γ - 1
x ^ k + 1 = A k x k + B k u k + C k (14)
A k = I 3 0 T I 3 0 0 I 9 + 0.5 T 2 Λ K δ 0 T F 9 + 0.5 T 2 Λ D δ 0 0 I 3 0 0 T Λ K δ 0 I 3 - T Λ D δ
B k = 0.5 T 2 I 3 0.5 T 2 Λ M θ δ T T I 3 T Λ M θ δ T
C k = 0 0.5 T 2 Λ h δ 0 T Λ h δ
u k 式(14)的控制对象,进而可通过式(8)求得τ k
3.2 最优控制律和最优驱动力矩解算
由于软体食指状态预测模型存在建模误差,控制器的性能会有所下降,因此需引入实际数据对开环预测输出的结果进行修正[17 ] 。首先,令x k x ^ k e k = x k - x ^ k e k x ^ k + 1
x c , k + 1 = x ^ k + 1 + e k (15)
J k = x c , k + 1 - x r , k + 1 T G x c , k + 1 - x r , k + 1 + u k T R u k (16)
式中:R G
结合力矩加权矩阵R G
设∂ J k / ∂ u k = 0 式(14)至式(19),得到最优控制律:
u k * = - R + B k T G B k B k T G A k x k + C k + e k - x r , k + 1 (17)
根据式(8)、式(10)和式(11),利用最优控制律求解最优驱动力矩:
τ k * = M θ θ - ( M θ δ - M θ θ Γ ) Λ M θ δ T u k * + h θ - ( M θ δ - M θ θ Γ ) Λ K δ δ k + D δ δ ˙ k (18)
比较预测精度,实际输出的影响在文献[18 ]中没有被考虑,本文在模型输出之后加入反馈矫正,将模型输出结果x ^ k + 1 x c , k + 1 x c , k + 1
3.3 软体手指末端位置跟踪仿真结果
修改软体食指状态预测模型中的某些参数,使其区别于真实参数,用于模拟误差,从而检验模型预测控制器的有效性。现给定三连杆软体手指状态预测模型计算所需的参数,具体如下:连杆密度ρ 1 = ρ 2 = ρ 3 = 0.2 k g / m 3 ς 1 = ς 2 = ς 3 = 0.1 k g l 1 = l 2 = l 3 = 0.5 m ς h 1 = ς h 2 = ς h 3 = 0.1 k g J h 1 = J h 2 = J h 3 = 0.005 L J 1 = J 2 = J 3 = 0.004 8 L λ 1 = λ 2 = λ 3 = 1 N ⋅ m 2 ρ 3 = 0.1 k g / m 3 l 3 = 0.7 m ς 1 = ς 2 = ς 3 = 0.2 kg,其他参数均与给定参数相同。
给定理想轨迹(即软体主手末端轨迹)相关参数:开始时间t 0 = 0 t f = 2 s δ t 0 = δ ˙ t 0 = 0 ξ r , t = ξ r , t 1 ξ r , t 2 ξ r , t 3 T ξ r , t 1 = π 3 t 5 - 15 t 4 + 20 t 3 / 96 ξ r , t 2 = π 3 t 5 - 15 t 4 + 20 t 3 / 64 ξ r , t 3 = π 3 t 5 - 15 t 4 + 20 t 3 / 32 δ r , t 0 ,控制器参数(T = 0.001 s
R = I 3 G = d i a g 10 4 10 5 1 1 1 1 10 4 10 5 1 1 1 1 10 4 10 5 1 1 1 1 (19)
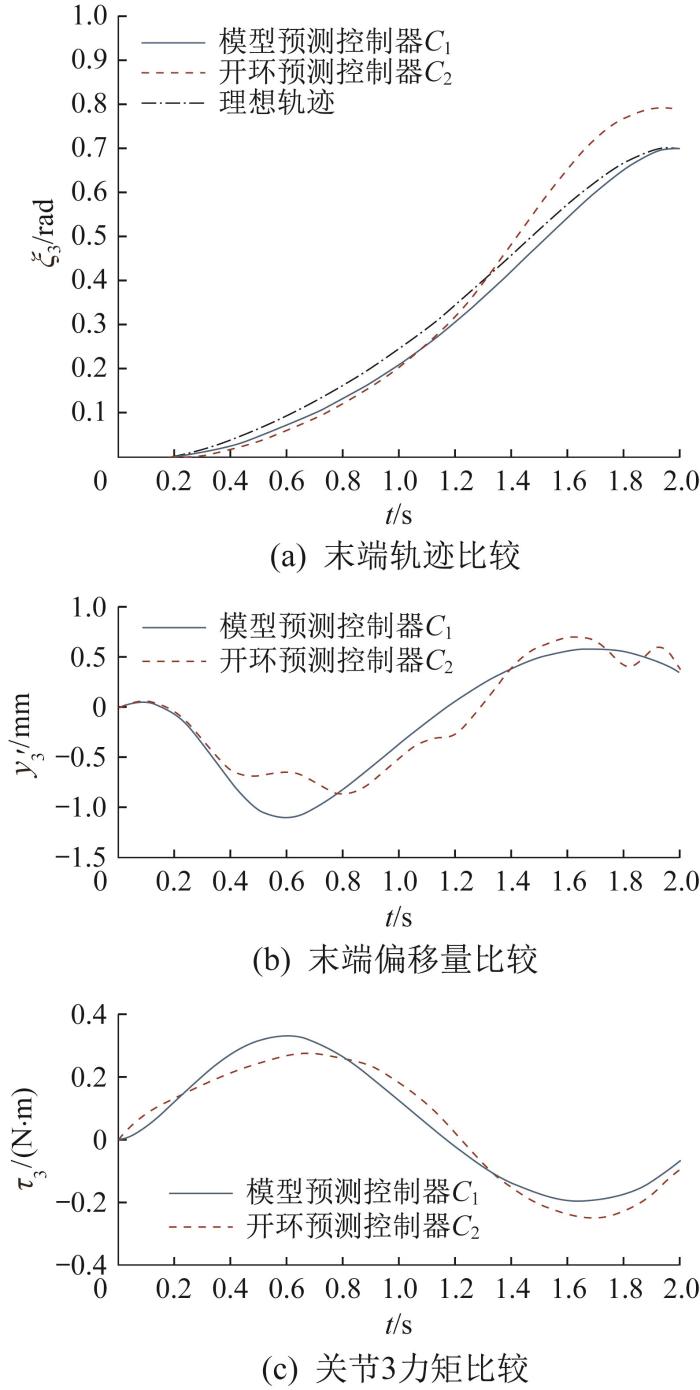
令本文设计的模型预测控制器为C 1 18 ]中的离线开环预测控制器为C 2 图5 所示。相较于文献[18 ],本文控制器的计算量虽已约减少一半,但计算仍较为复杂,因此本文仅考虑二阶模态,故产生的曲线相对光滑。图5 所示为2种控制器下含模型误差时软体食指的末端位置跟踪误差。由图5 (a)可知,相较于开环控制器C 2 C 1 C 1 图5 (b)和图5 (c)可知,当状态预测模型存在误差时,C 1 C 1
图5
图5
软体食指末端位置跟踪仿真结果对比
Fig.5
Comparison of end position tracking simulation results of soft index finger
以t 0 —t f 内软体食指末端偏移量绝对值的平均值和3根柔性连杆末端位置跟踪误差绝对值的平均值作为控制器性能的评价指标,2种控制器的性能评价结果如表1 所示。由表1 可得,2种控制器下软体食指末端的偏移幅度约相差4.5 % C 1 C 2 C 1 0.1 s C 2 0.2 s
4 实验验证
4.1 实验平台搭建
搭建人机交互遥操作机器人主从软体手控制系统。该系统分为软体主手控制系统、上位机、软体从手控制系统三部分。其中,软体主手控制系统与软体从手控制系统的构成类似,主要区别在于软体主手中嵌入的是弯曲传感器,软体从手中嵌入的是压力传感器。如图6 所示,软体主手控制系统由软体主手、24 V锂电池、气泵组、电磁阀组和控制板组成。其中,气泵组由10个Kamoer EDLP600-D24B气泵组成,每2个气泵负责1根软体手指的充/放气;电磁阀组由5个Ruhfus VT307V-5G1-02电磁阀组成,负责控制气路的切换;控制板最小系统中芯片的型号为STM32F103C8T6,能够确保系统的稳定运行并且准确、高效、高速地完成各个模块之间的通信和数据处理,从而完成抓取功能。
图6
图6
软体主手控制系统构成
Fig.6
Composition of soft master hand control system
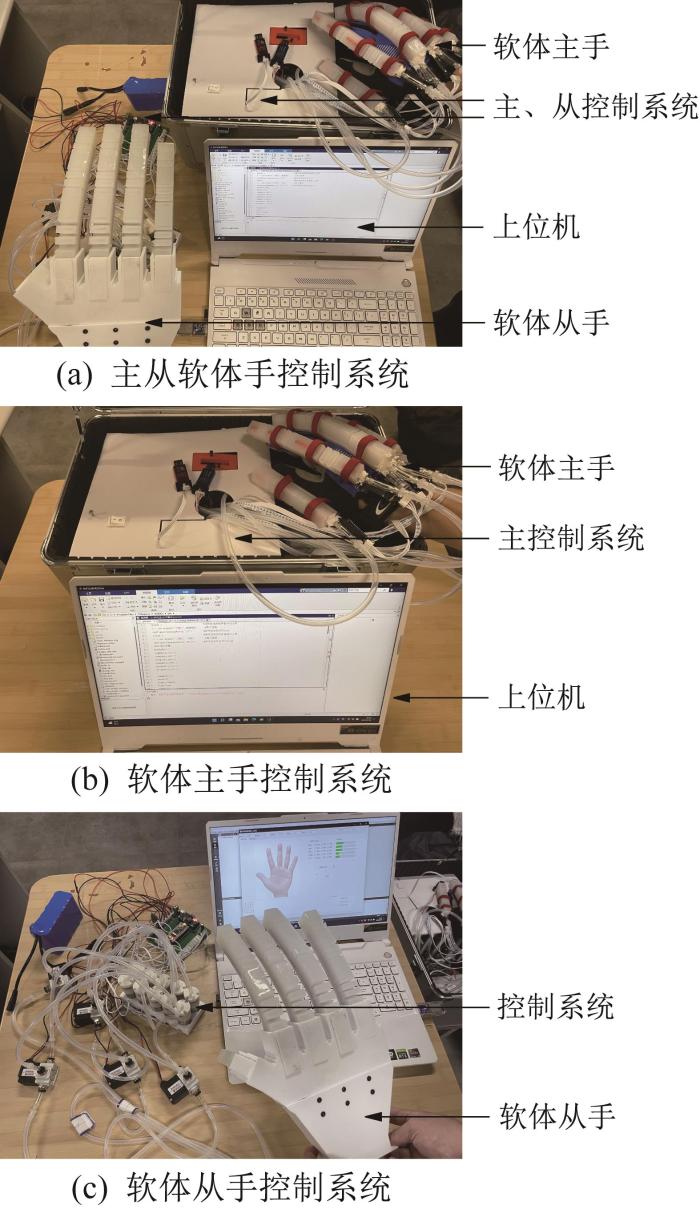
图7 所示为人机交互遥操作机器人主从软体手控制系统实验平台。其中,软体主、从手控制系统均包含气路控制与运动控制两部分,其与上位机的连接分别如图7 (b)和图7 (c)所示。
图7
图7
主从软体手控制系统实验平台
Fig.7
Master-slave soft hand control system experimental platform
4.2 软体从手跟随抓握实验
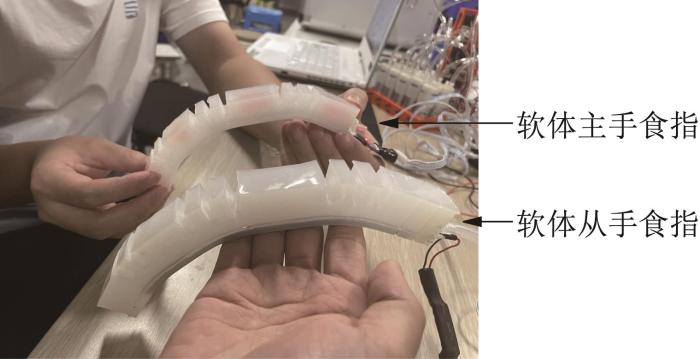
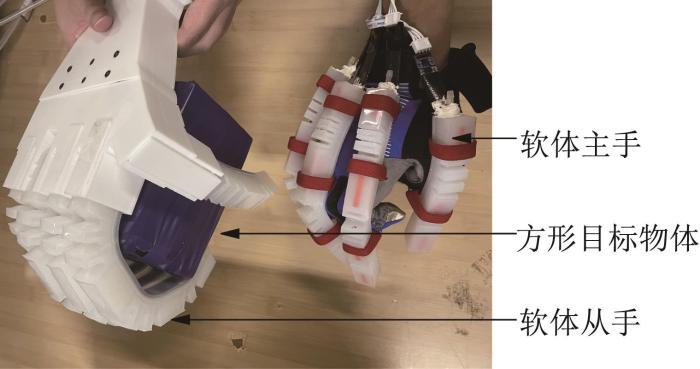
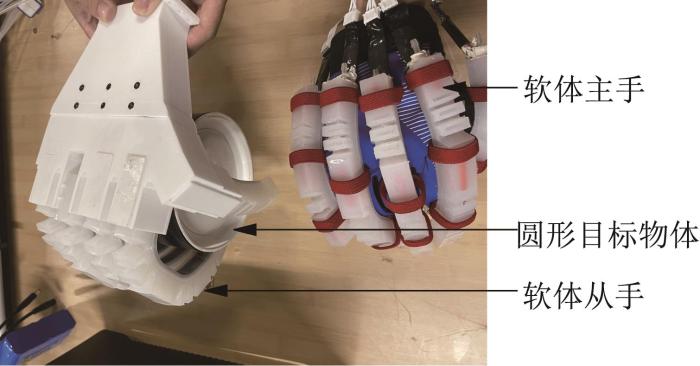
如图8 所示,通过手动弯曲软体主手食指来测试软体从手食指对其的跟随状态,结果显示跟随状态良好。如图9 所示,测试者穿戴软体主手数据手套做抓握方形物体的动作,通过测试得到软体从手能准确抓握方形物体。如图10 所示,测试者穿戴软体主手数据手套做抓握圆柱形物体的动作,通过测试得到软体从手能够准确抓握圆柱形物体。
图8
图8
软体从手食指跟随软体主手食指
Fig.8
Soft slave hand index finger follows soft master hand index finger
图9
图9
软体从手跟随软体主手抓握方形物体
Fig.9
Soft slave hand follows soft master hand to grasp square object
图10
图10
软体从手跟随软体主手抓握圆柱形物体
Fig.10
Soft slave hand follows soft master hand to grasp cylindrical object
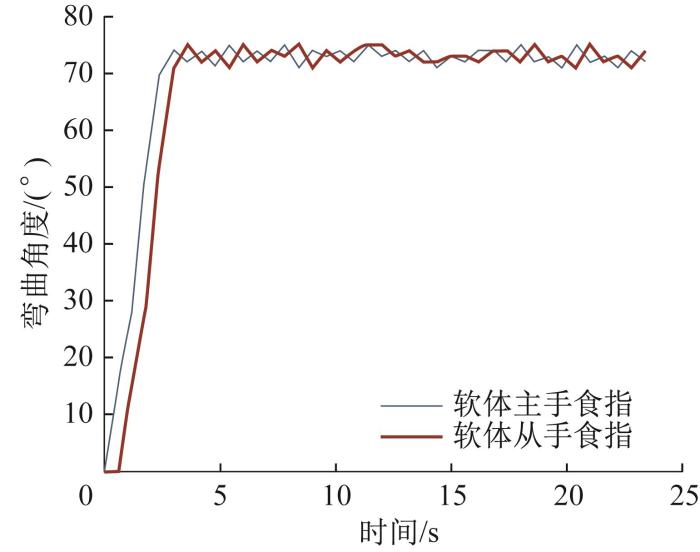
在软体从手中加入弯曲传感器,将软体从手弯曲时的传感器数据导出,并与软体主手弯曲传感器的数据进行对比。设定不同目标弯曲角度,并观察软体从手各手指是否能达到目标角度,从而进一步验证软体从手跟随的准确性。软体主手、软体从手食指的弯曲角度曲线如图11 所示,其中前6 s的具体数值如表2 所示。
图11
图11
软体主手和软体从手食指的弯曲角度对比
Fig.11
Comparison of bending angle of index finger between soft master hand and soft slave hand
图11 和表2 所示结果表明,软体从手食指在经历短暂延迟后能够迅速跟随软体主手食指做出相应动作,且跟随效果良好,即软体从手能够稳定且准确地抓握目标物体。
5 结束语
本文针对人机交互遥操作机器人主从软体手的位置跟踪控制问题,以软体食指末端位置跟踪为例,采用假设模态法进行建模,并通过引入模型预测控制算法,解决了软体从手跟踪软体主手性能差的问题。仿真结果表明,所设计的模型预测控制器能有效解决软体手指因模型失配而引起的控制精度下降问题;实验结果表明,所设计的主从软体手控制系统整体的运行效果良好。研究结果为人机交互遥操作机器人软体手的跟踪控制提供了参考。
参考文献
View Option
[10]
[本文引用: 1]
YANG G H ZENG Q J HAN C W et al Development of robot teleoperation human-computer interaction system based on soft hand
[J]. Measurement & Control Technology , 2023 , 42 (4 ): 94 -98 .
DOI:10.19708 /j.ckjs.2023.01.204
[本文引用: 1]
[11]
RUS D L TOLLEY M T Design, fabrication and control of soft robots
[J]. Nature , 2015 , 521 (7553 ): 467 -475 .
[本文引用: 1]
[13]
POLYGERINOS P WANG Z GALLOWAY K et al Soft robotic glove for combined assistance and at-home rehabilitation
[J]. Robotics & Autonomous Systems , 2014 , 73 : 135 -143 .
[本文引用: 1]
[14]
DEIMEL R BROCK O A novel type of compliant and underactuated robotic hand for dexterous grasping
[J]. International Journal of Robotics Research , 2016 , 35 (1 ): 161 -185 .
[本文引用: 1]
[15]
GUPTA A EPPNER C LEVINE S et al Learning dexterous manipulation for a soft robotic hand from human demonstration
[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems , Daejeon : IEEE , 2016 : 3786 -3793 .
[本文引用: 1]
[18]
WOOSOON Y SINGH S N Predictive end-point trajectory control of elastic manipulators
[J]. Journal of Robotic System , 1996 , 13 (9 ): 561 -569 .
[本文引用: 3]
[4]
GERBONI G DIODATO A CIUTI G et al Feedback control of soft robot actuators via commercial flex bend sensors
[J]. IEEE/ASME Transactions on Mechatronics , 2017 , 22 (4 ): 1881 -1888 .
[本文引用: 1]
[6]
HAO Y F GONG Z Y XIE Z X et al Universal soft pneumatic robotic gripper with variable effective length
[C]//2016 35th Chinese Control Conference (CCC) , Chengdu, Jul . 27 -29 , 2016 .
[本文引用: 1]
[9]
[本文引用: 1]
HU W Q WANG H L WU Z Y et al The research of predictive fuzzy self-tuning PID control in pneumatic servo manipulator
[J]. Machinery Design and Manufacture , 2009 (1 ): 169 -171 .
DOI:10.3969/j.issn.1001-3997.2009.01.066
[本文引用: 1]
基于软体手的机器人遥操作人机交互系统研制
1
2023
... 如图1 所示,人机交互遥操作机器人主从软体手控制系统由3个部分构成:主端控制回路、通信链路和从端控制回路[10 ] .该控制系统的工作原理为:操作者的手通过人机交互设备——软体主手数据手套向控制系统发送指令信号,控制系统接收到信号后将其远程发送至机器人软体从手,软体从手根据控制信号完成相应的动作;在完成动作的过程中,软体从手通过嵌入的力觉传感器与外部环境进行交互,并将相应的压力信息反馈到软体主手数据手套处,人手在感受到这一反馈信息后及时调整动作,以完成目标物体的抓取. ...
基于软体手的机器人遥操作人机交互系统研制
1
2023
... 如图1 所示,人机交互遥操作机器人主从软体手控制系统由3个部分构成:主端控制回路、通信链路和从端控制回路[10 ] .该控制系统的工作原理为:操作者的手通过人机交互设备——软体主手数据手套向控制系统发送指令信号,控制系统接收到信号后将其远程发送至机器人软体从手,软体从手根据控制信号完成相应的动作;在完成动作的过程中,软体从手通过嵌入的力觉传感器与外部环境进行交互,并将相应的压力信息反馈到软体主手数据手套处,人手在感受到这一反馈信息后及时调整动作,以完成目标物体的抓取. ...
Design, fabrication and control of soft robots
1
2015
... 图3 所示的软体食指含有3根柔性连杆,每根连杆的关节位于连杆首端,可驱动连杆整体转动;连杆3的末端,即软体食指整体的末端处于自由状态,只受软体食指自身弯曲的影响.由于柔性连杆的截面积相对于软体食指整体的长度而言很小,以及柔性连杆中均匀嵌入了金属颗粒来增大刚度,且软体食指只在一个平面上作横向弯曲运动,弯曲变形集中在关节处,而柔性连杆的变形较小,故柔性连杆具有Euler-Bernoulli梁特性[11 ] .忽略重力的作用,软体食指只在二维平面内作弯曲运动,其为一个时变非线性分布参数系统,包含任意个自由度.在Rayleigh-Ritz法基础上产生的假设模态法[12 ] ,通过拉格朗日方程和汉密尔顿原理以及去除高阶模态的方法得到最终的离散动力方程,最适用于本文的软体手指建模.如图4 所示,将原点O i i O i - X i Y i O i - X i ' Y i ' Xi 轴与X i ' θ i i Oi 的连线与Xi 轴之间的夹角为ξ i i x i ' y i ' x i ' , t
基于假设模态法的柔性机械臂瞬时变形响应分析
1
2019
... 图3 所示的软体食指含有3根柔性连杆,每根连杆的关节位于连杆首端,可驱动连杆整体转动;连杆3的末端,即软体食指整体的末端处于自由状态,只受软体食指自身弯曲的影响.由于柔性连杆的截面积相对于软体食指整体的长度而言很小,以及柔性连杆中均匀嵌入了金属颗粒来增大刚度,且软体食指只在一个平面上作横向弯曲运动,弯曲变形集中在关节处,而柔性连杆的变形较小,故柔性连杆具有Euler-Bernoulli梁特性[11 ] .忽略重力的作用,软体食指只在二维平面内作弯曲运动,其为一个时变非线性分布参数系统,包含任意个自由度.在Rayleigh-Ritz法基础上产生的假设模态法[12 ] ,通过拉格朗日方程和汉密尔顿原理以及去除高阶模态的方法得到最终的离散动力方程,最适用于本文的软体手指建模.如图4 所示,将原点O i i O i - X i Y i O i - X i ' Y i ' Xi 轴与X i ' θ i i Oi 的连线与Xi 轴之间的夹角为ξ i i x i ' y i ' x i ' , t
基于假设模态法的柔性机械臂瞬时变形响应分析
1
2019
... 图3 所示的软体食指含有3根柔性连杆,每根连杆的关节位于连杆首端,可驱动连杆整体转动;连杆3的末端,即软体食指整体的末端处于自由状态,只受软体食指自身弯曲的影响.由于柔性连杆的截面积相对于软体食指整体的长度而言很小,以及柔性连杆中均匀嵌入了金属颗粒来增大刚度,且软体食指只在一个平面上作横向弯曲运动,弯曲变形集中在关节处,而柔性连杆的变形较小,故柔性连杆具有Euler-Bernoulli梁特性[11 ] .忽略重力的作用,软体食指只在二维平面内作弯曲运动,其为一个时变非线性分布参数系统,包含任意个自由度.在Rayleigh-Ritz法基础上产生的假设模态法[12 ] ,通过拉格朗日方程和汉密尔顿原理以及去除高阶模态的方法得到最终的离散动力方程,最适用于本文的软体手指建模.如图4 所示,将原点O i i O i - X i Y i O i - X i ' Y i ' Xi 轴与X i ' θ i i Oi 的连线与Xi 轴之间的夹角为ξ i i x i ' y i ' x i ' , t
Soft robotic glove for combined assistance and at-home rehabilitation
1
2014
... 式中:m i [13 ] ;ϕ i j x i ' δ i j t
A novel type of compliant and underactuated robotic hand for dexterous grasping
1
2016
... 在理想状态下,仅从初始条件出发,将理想轨迹ξ r , t 式(9) 可得到唯一解,而后将ξ r , t δ r , t 式(8) ,求得最优力矩τ r , t ξ t = ξ r , t . 但是,在实际情况下,式(9) 中δ ¨ ξ r , t δ r , t 0 δ ˙ r , t 0 δ r , t δ t [14 ] .模型预测控制算法对模型精度的要求不高,且其实时滚动的特点适合在线实时跟踪,故适用于时变非线性系统的建模[15 ] .采用将力矩求解和最优控制律求解分离的方法来设计模型预测控制器,进而提高整体的运算速度,并通过误差补偿算法来提高运行时的控制精度. ...
Learning dexterous manipulation for a soft robotic hand from human demonstration
1
2016
... 在理想状态下,仅从初始条件出发,将理想轨迹ξ r , t 式(9) 可得到唯一解,而后将ξ r , t δ r , t 式(8) ,求得最优力矩τ r , t ξ t = ξ r , t . 但是,在实际情况下,式(9) 中δ ¨ ξ r , t δ r , t 0 δ ˙ r , t 0 δ r , t δ t [14 ] .模型预测控制算法对模型精度的要求不高,且其实时滚动的特点适合在线实时跟踪,故适用于时变非线性系统的建模[15 ] .采用将力矩求解和最优控制律求解分离的方法来设计模型预测控制器,进而提高整体的运算速度,并通过误差补偿算法来提高运行时的控制精度. ...
基于柔性腕手的最优抓取规划研究
1
2020
... 设采样时间为T ξ t = ξ r , t x k = x r , k . 其中x r , k ξ r , k 、 ξ ˙ r , k δ r , k 、 δ ˙ r , k 0 [16 ] . ...
基于柔性腕手的最优抓取规划研究
1
2020
... 设采样时间为T ξ t = ξ r , t x k = x r , k . 其中x r , k ξ r , k 、 ξ ˙ r , k δ r , k 、 δ ˙ r , k 0 [16 ] . ...
驱控一体7DOF机械臂位置控制技术研究
1
2022
... 由于软体食指状态预测模型存在建模误差,控制器的性能会有所下降,因此需引入实际数据对开环预测输出的结果进行修正[17 ] .首先,令x k x ^ k e k = x k - x ^ k e k x ^ k + 1
驱控一体7DOF机械臂位置控制技术研究
1
2022
... 由于软体食指状态预测模型存在建模误差,控制器的性能会有所下降,因此需引入实际数据对开环预测输出的结果进行修正[17 ] .首先,令x k x ^ k e k = x k - x ^ k e k x ^ k + 1
力觉临场感遥操作机器人(1):技术发展与现状
2
2013
... 随着人类向外太空、深海探索,能够代替人类在危险或有害环境中远程作业的遥操作机器人成为热门的研究前沿.相较于普通机器人,遥操作机器人的控制方式从全自主方式转向交互方式,操作者在主端远程向从端发送信号,从端机器人接收信号后完成相应的操作[1 ] .在未知环境中,遥操作机器人更具有实际应用意义.因此,大量学者参与到遥操作机器人技术的研究开发中. ...
... 但是,传统的遥操作机器人仅依靠视觉辅助抓取目标物体,在作业中存在易损坏目标或抓取目标失败等情况.因此,人机交互遥操作机器人应运而生.在遥操作已有特点的基础上,人与机器人交互有助于解决机器人在未知或非确定环境中难以决策和规划的问题,而将机器人与外部环境的交互信息反馈到主端,可协助操作者决策,避免作业时发生意外,保证了作业的高效、精准[2 ] ,同时可实现在人类无法到达的外太空、深海和辐射等恶劣环境中完成作业.在复杂、未知环境中,人机交互技术成为机器人作业的主要方式[1 ] . ...
力觉临场感遥操作机器人(1):技术发展与现状
2
2013
... 随着人类向外太空、深海探索,能够代替人类在危险或有害环境中远程作业的遥操作机器人成为热门的研究前沿.相较于普通机器人,遥操作机器人的控制方式从全自主方式转向交互方式,操作者在主端远程向从端发送信号,从端机器人接收信号后完成相应的操作[1 ] .在未知环境中,遥操作机器人更具有实际应用意义.因此,大量学者参与到遥操作机器人技术的研究开发中. ...
... 但是,传统的遥操作机器人仅依靠视觉辅助抓取目标物体,在作业中存在易损坏目标或抓取目标失败等情况.因此,人机交互遥操作机器人应运而生.在遥操作已有特点的基础上,人与机器人交互有助于解决机器人在未知或非确定环境中难以决策和规划的问题,而将机器人与外部环境的交互信息反馈到主端,可协助操作者决策,避免作业时发生意外,保证了作业的高效、精准[2 ] ,同时可实现在人类无法到达的外太空、深海和辐射等恶劣环境中完成作业.在复杂、未知环境中,人机交互技术成为机器人作业的主要方式[1 ] . ...
Predictive end-point trajectory control of elastic manipulators
3
1996
... 比较预测精度,实际输出的影响在文献[18 ]中没有被考虑,本文在模型输出之后加入反馈矫正,将模型输出结果x ^ k + 1 x c , k + 1 x c , k + 1
... 令本文设计的模型预测控制器为C 1 18 ]中的离线开环预测控制器为C 2 . 在模型失配的情况下,分别用2种控制器对软体食指的末端位置进行实时跟踪,并比较2种控制器的末端位置跟踪误差和计算速度,基于MATLAB软件的仿真结果如图5 所示.相较于文献[18 ],本文控制器的计算量虽已约减少一半,但计算仍较为复杂,因此本文仅考虑二阶模态,故产生的曲线相对光滑.图5 所示为2种控制器下含模型误差时软体食指的末端位置跟踪误差.由图5 (a)可知,相较于开环控制器C 2 C 1 C 1 图5 (b)和图5 (c)可知,当状态预测模型存在误差时,C 1 C 1
... 所示.相较于文献[18 ],本文控制器的计算量虽已约减少一半,但计算仍较为复杂,因此本文仅考虑二阶模态,故产生的曲线相对光滑.图5 所示为2种控制器下含模型误差时软体食指的末端位置跟踪误差.由图5 (a)可知,相较于开环控制器C 2 C 1 C 1 图5 (b)和图5 (c)可知,当状态预测模型存在误差时,C 1 C 1
基于虚拟现实的机器人遥操作关键技术研究
1
2017
... 但是,传统的遥操作机器人仅依靠视觉辅助抓取目标物体,在作业中存在易损坏目标或抓取目标失败等情况.因此,人机交互遥操作机器人应运而生.在遥操作已有特点的基础上,人与机器人交互有助于解决机器人在未知或非确定环境中难以决策和规划的问题,而将机器人与外部环境的交互信息反馈到主端,可协助操作者决策,避免作业时发生意外,保证了作业的高效、精准[2 ] ,同时可实现在人类无法到达的外太空、深海和辐射等恶劣环境中完成作业.在复杂、未知环境中,人机交互技术成为机器人作业的主要方式[1 ] . ...
基于虚拟现实的机器人遥操作关键技术研究
1
2017
... 但是,传统的遥操作机器人仅依靠视觉辅助抓取目标物体,在作业中存在易损坏目标或抓取目标失败等情况.因此,人机交互遥操作机器人应运而生.在遥操作已有特点的基础上,人与机器人交互有助于解决机器人在未知或非确定环境中难以决策和规划的问题,而将机器人与外部环境的交互信息反馈到主端,可协助操作者决策,避免作业时发生意外,保证了作业的高效、精准[2 ] ,同时可实现在人类无法到达的外太空、深海和辐射等恶劣环境中完成作业.在复杂、未知环境中,人机交互技术成为机器人作业的主要方式[1 ] . ...
软体机器人:结构、驱动、传感与控制
1
2017
... 由于传统刚体机器人存在设计过于复杂、自由度有限、无法适应复杂场景及存在危险因素等缺陷,其刚性结构亟须改进.软体机器人由软质材料制成,相较于刚体机器人具有柔软、可连续变形等特点,在抓取软体物体、易碎物体时优势明显,可适应更为复杂、狭小空间中的作业[3 ] .软体手因具有对复杂场景的适应性以及柔顺性,搭配软体机器人具有广阔的应用前景. ...
软体机器人:结构、驱动、传感与控制
1
2017
... 由于传统刚体机器人存在设计过于复杂、自由度有限、无法适应复杂场景及存在危险因素等缺陷,其刚性结构亟须改进.软体机器人由软质材料制成,相较于刚体机器人具有柔软、可连续变形等特点,在抓取软体物体、易碎物体时优势明显,可适应更为复杂、狭小空间中的作业[3 ] .软体手因具有对复杂场景的适应性以及柔顺性,搭配软体机器人具有广阔的应用前景. ...
Feedback control of soft robot actuators via commercial flex bend sensors
1
2017
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
软体机械手遥操作系统的设计与分析
1
2020
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
软体机械手遥操作系统的设计与分析
1
2020
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
Universal soft pneumatic robotic gripper with variable effective length
1
2016
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
基于弯曲度预测模型的软体手人机交互控制
1
2022
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
基于弯曲度预测模型的软体手人机交互控制
1
2022
... 目前,国内外学者已对软体手进行了广泛深入的研究.例如:Gerboni等[4 ] 将弯曲传感器嵌入软体驱动器,实现了闭环反馈控制;姚建涛等[5 ] 搭建了一套软体机械手遥操作系统;Hao等[6 ] 制作了全柔性气动软体手;韩非等[7 ] 基于数据手套构建了一套软体手人机交互系统.这一系列的研究使得软体手的抓握更加精准,为其结构的设计与改进提供了新方向. ...
一种柔性机械臂末端轨迹跟踪的预测控制算法
2
2010
... 本文为了提高人机交互遥操作机器人软体从手的前馈控制跟踪精度和反馈控制实时性[8 ] ,通过引入模型预测控制算法,提出了一种主从软体手位置跟踪方法.模型预测控制是一种可实时滚动的控制,将其引入被控对象,可避免建模引起的误差,其在复杂系统实时控制中的应用十分广泛[9 ] .首先,介绍人机交互遥操作机器人主从软体手控制系统的构成和工作原理;然后,采用假设模态法进行软体手指建模,将位置跟踪问题转换为状态跟踪问题,并引入模型预测控制算法,用于软体手指的位置跟踪,以解决软体从手跟踪软体主手性能差的问题;最后,开展软体从手跟随软体主手抓握目标物体的实验,以验证软体从手跟踪软体主手并实现抓握的可行性. ...
... 采用硅胶制作而成的软体手指因存在易变形的问题,在抓取目标物体时会存在力量不够以及刚度不足的问题.因此,在硅胶软体手指的每个指节处加入固体颗粒来增大刚度.本文在对软体手指进行动力学建模时,将软体手指等效为柔性连杆并采用文献[8 ]中的柔性连杆建模方法.根据图2 所示的软体食指三维模型,将软体食指简化等效为三连杆结构,其中手指弯曲腔段等效为转动关节,指节部分等效为柔性连杆,如图3 所示. ...
一种柔性机械臂末端轨迹跟踪的预测控制算法
2
2010
... 本文为了提高人机交互遥操作机器人软体从手的前馈控制跟踪精度和反馈控制实时性[8 ] ,通过引入模型预测控制算法,提出了一种主从软体手位置跟踪方法.模型预测控制是一种可实时滚动的控制,将其引入被控对象,可避免建模引起的误差,其在复杂系统实时控制中的应用十分广泛[9 ] .首先,介绍人机交互遥操作机器人主从软体手控制系统的构成和工作原理;然后,采用假设模态法进行软体手指建模,将位置跟踪问题转换为状态跟踪问题,并引入模型预测控制算法,用于软体手指的位置跟踪,以解决软体从手跟踪软体主手性能差的问题;最后,开展软体从手跟随软体主手抓握目标物体的实验,以验证软体从手跟踪软体主手并实现抓握的可行性. ...
... 采用硅胶制作而成的软体手指因存在易变形的问题,在抓取目标物体时会存在力量不够以及刚度不足的问题.因此,在硅胶软体手指的每个指节处加入固体颗粒来增大刚度.本文在对软体手指进行动力学建模时,将软体手指等效为柔性连杆并采用文献[8 ]中的柔性连杆建模方法.根据图2 所示的软体食指三维模型,将软体食指简化等效为三连杆结构,其中手指弯曲腔段等效为转动关节,指节部分等效为柔性连杆,如图3 所示. ...
气动伺服机械手的预测模糊自整定PID控制研究
1
2009
... 本文为了提高人机交互遥操作机器人软体从手的前馈控制跟踪精度和反馈控制实时性[8 ] ,通过引入模型预测控制算法,提出了一种主从软体手位置跟踪方法.模型预测控制是一种可实时滚动的控制,将其引入被控对象,可避免建模引起的误差,其在复杂系统实时控制中的应用十分广泛[9 ] .首先,介绍人机交互遥操作机器人主从软体手控制系统的构成和工作原理;然后,采用假设模态法进行软体手指建模,将位置跟踪问题转换为状态跟踪问题,并引入模型预测控制算法,用于软体手指的位置跟踪,以解决软体从手跟踪软体主手性能差的问题;最后,开展软体从手跟随软体主手抓握目标物体的实验,以验证软体从手跟踪软体主手并实现抓握的可行性. ...
气动伺服机械手的预测模糊自整定PID控制研究
1
2009
... 本文为了提高人机交互遥操作机器人软体从手的前馈控制跟踪精度和反馈控制实时性[8 ] ,通过引入模型预测控制算法,提出了一种主从软体手位置跟踪方法.模型预测控制是一种可实时滚动的控制,将其引入被控对象,可避免建模引起的误差,其在复杂系统实时控制中的应用十分广泛[9 ] .首先,介绍人机交互遥操作机器人主从软体手控制系统的构成和工作原理;然后,采用假设模态法进行软体手指建模,将位置跟踪问题转换为状态跟踪问题,并引入模型预测控制算法,用于软体手指的位置跟踪,以解决软体从手跟踪软体主手性能差的问题;最后,开展软体从手跟随软体主手抓握目标物体的实验,以验证软体从手跟踪软体主手并实现抓握的可行性. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}