人机交互遥操作机器人软体手位置跟踪设计与实现
Design and implementation of soft hand position tracking for human-computer interactive teleoperation robot
人机交互遥操作机器人软体手位置跟踪设计与实现 |
| 杨淦华,曾庆军,韩春伟,黄鑫,戴晓强 |
|
Design and implementation of soft hand position tracking for human-computer interactive teleoperation robot |
| Ganhua YANG,Qingjun ZENG,Chunwei HAN,Xin HUANG,Xiaoqiang DAI |
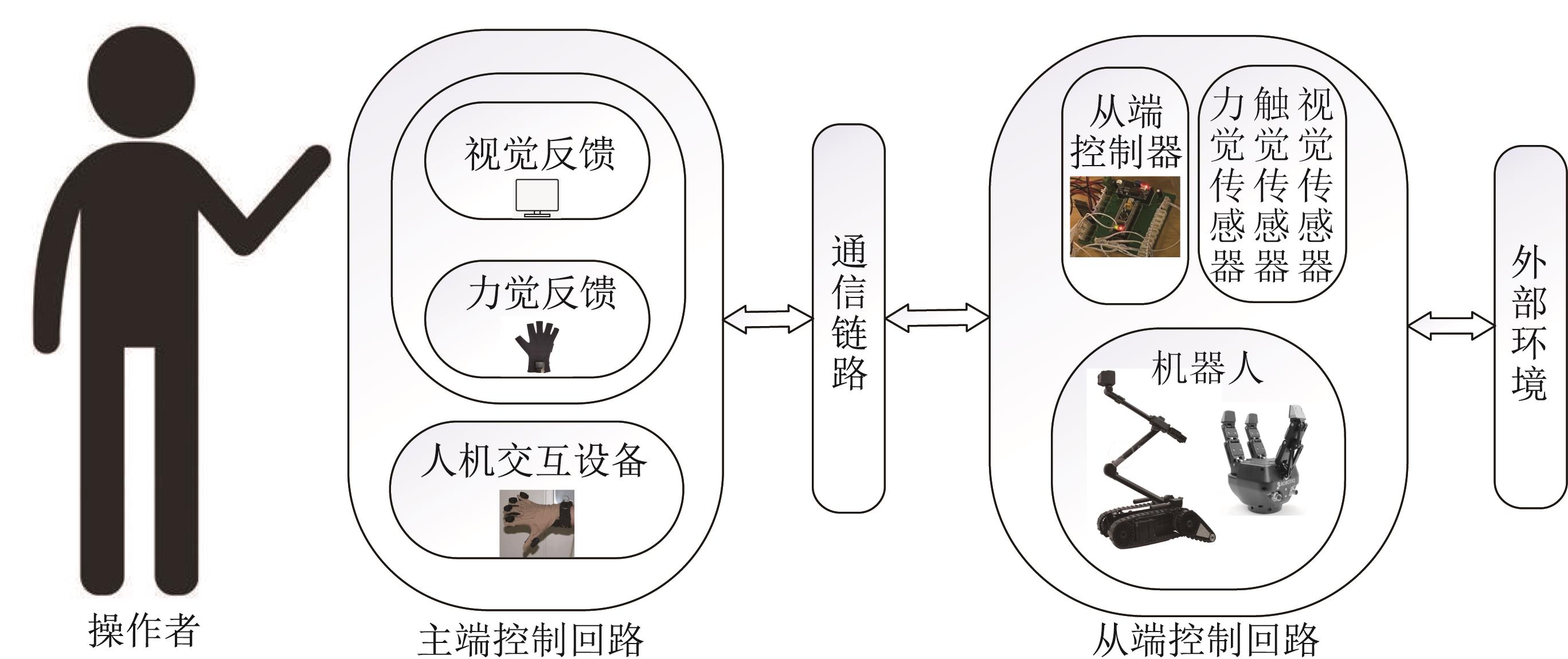
| 图1 人机交互遥操作机器人主从软体手控制系统的构成及工作原理 |
| Fig.1 Composition and working principle of master-slave soft hand control system for human-computer interactive teleoperation robot |
|
|