人机交互遥操作机器人软体手位置跟踪设计与实现
Design and implementation of soft hand position tracking for human-computer interactive teleoperation robot
人机交互遥操作机器人软体手位置跟踪设计与实现 |
| 杨淦华,曾庆军,韩春伟,黄鑫,戴晓强 |
|
Design and implementation of soft hand position tracking for human-computer interactive teleoperation robot |
| Ganhua YANG,Qingjun ZENG,Chunwei HAN,Xin HUANG,Xiaoqiang DAI |
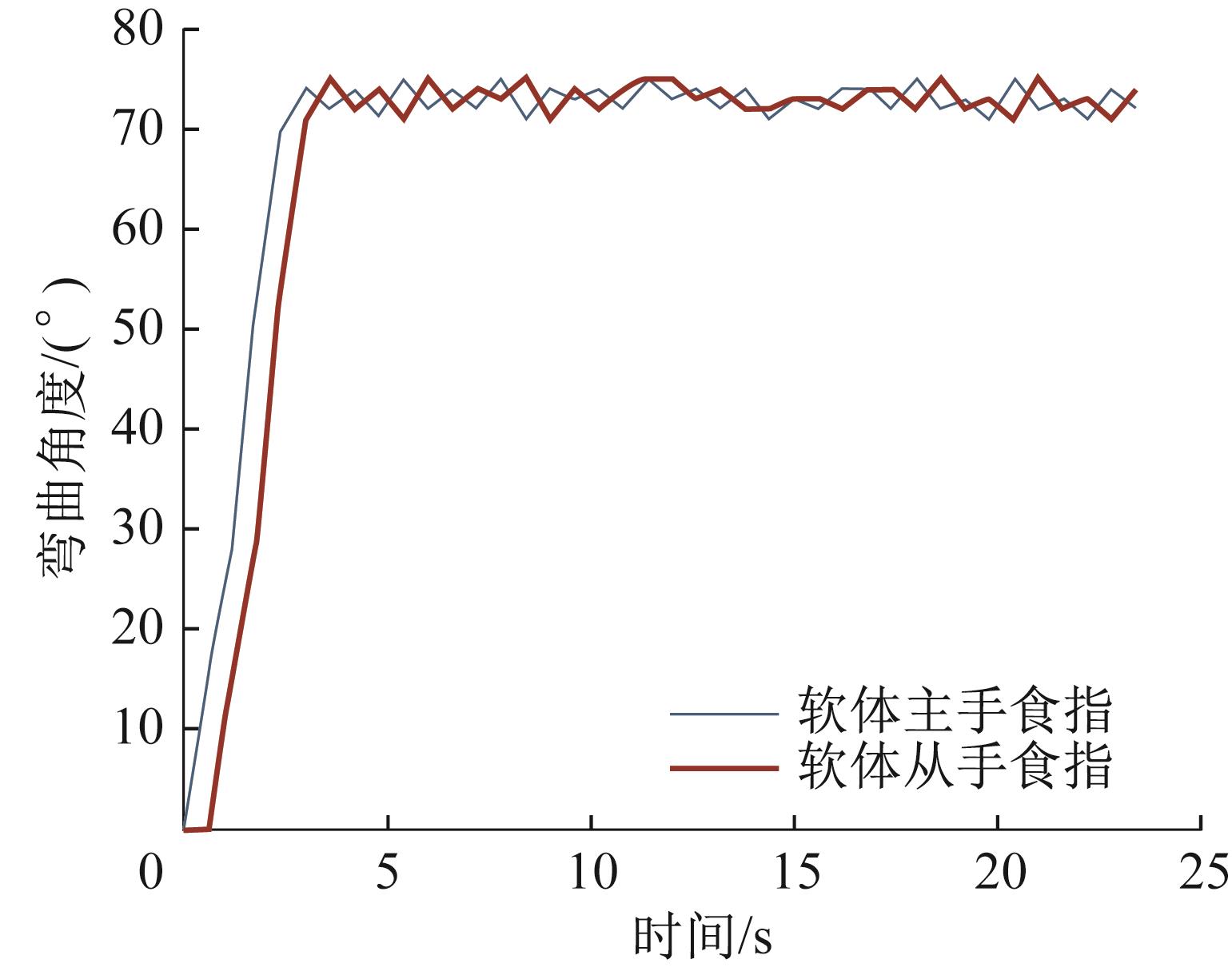
| 图11 软体主手和软体从手食指的弯曲角度对比 |
| Fig.11 Comparison of bending angle of index finger between soft master hand and soft slave hand |
|
|