六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] 。六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] 。
近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果。如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案。
综上,目前已初步实现了六足机器人仿生结构设计及柔顺运动控制,但仍存在机器人地形适应能力不强、运动柔顺性能不高等突出问题。现有研究对典型六足生物的观测及对生物驱动方式的剖析还不够深入,六足机器人仿生结构设计的基本原则还不完善。机器人单足结构形式、机体布置形式等都影响着其单足惯量、机体稳定性和地形适应性,而受限于运动柔顺控制的不足,六足机器人步态还较僵硬,足端冲击较大,整体运动还不够协调。
针对上述问题,本文开展典型六足生物——蚂蚁的观测实验,分析蚂蚁的生理结构特征和驱动方式,提出适用于六足机器人仿生结构设计的基本原则;基于低惯量单足结构设计,优化机器人驱动形式与机体布置,设计一种关节电机驱动的六足机器人的整体结构;根据六足机器人直行、转向步态,规划三角函数曲线与直线相结合的足端轨迹,提出基于分级控制的六足机器人柔顺运动的控制方法;最后,搭建实验样机进行实验,来验证机器人仿生结构设计的合理性,以期实现机器人相对柔顺的直行与转向运动。
1 蚂蚁观测实验
1.1 蚂蚁生理结构分析
六足生物的生理结构特征和生理结构参数是六足机器人仿生结构设计的基础。为此,选取典型六足生物——蚂蚁的样本,开展观测实验,分析其单足结构特点和六足分布形式,并测量各足足节尺寸及六足分布尺寸。
蚂蚁生理结构如图1 所示。头、胸、腹三部分组成躯干结构,基、股、胫、跗四足节构成单足结构,前、中、后三对足对称分布于胸部两侧。为了进一步研究蚂蚁的生理结构特征,选取3个体型适宜的观测样本,测量其股节、胫节与跗节的长度以及六足的分布尺寸,测得的数据如表1 和表2 所示。表中:D M1 、D M2 、D M3 分别为每对前足、中足和后足基节之间的距离;L M1 为前足基节连线与中足基节连线之间的距离;L M2 为中足基节连线与后足基节连线之间的距离。根据蚂蚁单足足节参数,结合蚂蚁胸部尺寸,来优化六足机器人单足和机体的结构及比例。
图1
图1
蚂蚁生理结构
Fig.1
Physiological structure of ant
1.2 蚂蚁驱动分析
蚂蚁卓越的运动柔顺性及对非平整地形的适应能力得益于其肌肉骨骼驱动系统。为了提高六足机器人柔顺运动能力,增强机器人地形适应性能,借鉴蚂蚁单足驱动系统来探究适合六足机器人的单足驱动形式,优化机器人单足结构设计。
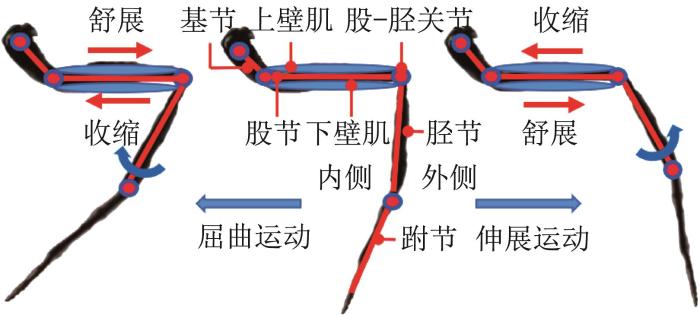
蚂蚁单足驱动系统如图2 所示。蚂蚁单足运动由骨骼与肌肉共同完成,骨骼为运动的载体,肌肉为运动提供驱动力。定义附着于股节上侧的肌肉为上壁肌,附着于股节下侧的肌肉为下壁肌,股节、胫节通过股-胫关节连接。蚂蚁单足胫节运动根据股-胫关节夹角的变化分为屈曲运动和伸展运动。屈曲运动为:上壁肌舒展,下壁肌收缩,胫节向内侧转动,股-胫关节的夹角减小;伸展运动为:下壁肌舒展,上壁肌收缩,胫节向外侧转动,股-胫关节的夹角增大。股节肌肉的强韧性会极大地影响生物的承载能力以及柔顺运动能力:肌肉处于舒展状态时刚度较小,适合在非平整地形上的柔顺运动;肌肉收缩时刚度增大,适合高效、快速运动。因此,可借鉴蚂蚁单足驱动系统来优化六足机器人单足骨骼结构和驱动策略设计。
图2
图2
蚂蚁单足驱动系统
Fig.2
Single foot drive system of ant
2 六足机器人结构设计
2.1 设计原则
通过剖析蚂蚁的生理结构特征和驱动方式,借鉴蚂蚁观测实验的数据,提出适用于六足机器人单足结构设计、单足驱动设计和机体结构设计的基本原则,为六足机器人仿生结构设计提供依据。
1)单足结构设计原则:基于蚂蚁单足结构特征以及各足节之间的长度比例,优化机器人单足结构尺寸,提高机器人运动性能;基于机器人运动空间位姿要求,优化单足自由度数,降低机器人单足结构复杂度;基于机器人运动稳定性考虑,优化机器人单足惯量,提高机器人运动可靠性。
2)单足驱动设计原则:基于低惯量单足结构设计,在确保机器人运动性能的前提下,选取质量小、尺寸小、效能高的运动驱动器;基于蚂蚁驱动方式的分析,参照蚂蚁驱动与承载相配合的特点,优化机器人驱动方式;借鉴蚂蚁单足驱动系统,结合机器人单足、机体结构,合理设计机器人传动方式。
3)机体结构设计原则:基于蚂蚁六足分布形式及躯干尺寸,综合考虑机器人工作空间,优化机器人六足在机体上的布局;基于机器人机体布置形式,综合考虑机器人工作环境,合理设计机体结构;基于机器人运动效能考虑,优化机器人机体尺寸与质量,减小机器人运动能耗。
2.2 整机结构设计
根据六足机器人设计原则,合理优化机器人仿生结构,设计了一种关节电机驱动的六足机器人。其整机结构如图3 所示,主要包含单足结构和机体结构。
图3
图3
六足机器人整机结构
Fig.3
Overall structure of hexapod robot
综合考虑机器人尺寸、运动灵活性以及足间干涉等因素,机器人机体布置尺寸优化为:D M 1 : L M 1 = 1.32 : 1 D M 1 = D M 2 = D M 3 L M 1 = L M 2
由实验数据可知,蚂蚁股节、胫节、跗节的长度比约为1.06 : 1 : 0.50 0.875 : 1 图3 所示从右前足到左前足按顺时针依次编号为足1、足2、足3、足4、足5和足6。
2.3 单足结构设计
设计的六足机器人三自由度低惯量单足结构如图4 所示,其主要包括基节、股节、胫节和3个驱动电机。3个驱动电机布置于基节处,胫节通过同步带进行传动。胫节电机与股节固连,其输出端的小带轮通过同步带带动固连于胫节的大带轮转动,实现胫节的屈曲与伸展运动。股节电机、胫节电机同轴反向布置,股节电机输出端与股节固连,带动股节转动,实现抬足与落足运动。股节转动的轴线与基节转动的轴线相交,基节电机通过基节与股节电机相连,基节电机转动实现单足前后摆动运动。该布置形式改善了单足的运动惯量,提高了其运动稳定性。同时,为了增强机器人与外界的交互能力,采取机器人活动足端与接触开关配合的策略,即机器人在运动过程中足端触地并压缩弹簧,在直线轴承内短行程滑动,足端顶端触发胫节内的接触开关,实现落足触地检测功能,同时胫节内的弹簧可减弱足端触地冲击。
图4
图4
六足机器人单足结构
Fig.4
Single foot structure of hexapod robot
胫节采用同步带传动方式,将单足质量集中在机体,有效降低了单足惯量及机器人的运动能耗。为了增强机器人的交互能力及柔顺运动性能,选取本体感知关节电机作为驱动器。该驱动器结构紧凑、性能优良,将可变刚度串联弹性驱动器与伺服电机相结合,可实现机器人单足与外界的接触反馈,还配备了双编码器来实现精准运动控制。通过动态调节电机刚度及同步带强韧度,从主动和被动两方面来优化关节刚度,提高单足运动的顺应性,使机器人能适应不同的任务需求。
2.4 机体结构设计
借鉴蚂蚁六足分布形式和躯干结构特征,设计了六边形、四边形两种机体布置方案,如图5 所示。基于静态稳定裕量判定法,通过对比2种机体布置方案的静态稳定裕量S
图5
图5
六足机器人机体布置方案
Fig.5
Body layout scheme of hexapod robot
图5 中,参考面与纸面平行,设定胫节与参考面垂直,机体平面平行于参考面,股节与机体平面平行,胫节与股节的夹角为π / 2 S 1 S 2 S S S 1 = 78.5 m m S 2 = 73.3 m m
机器人工作于复杂户外环境,为了减少内、外部干扰对机体及其内部元件的影响,设计了一种紧凑型、封闭式的轻质箱型机体结构。为了降低机器人高度,提高机器人在复杂地形的可通过性,将基节电机布置于机体内部,在保证箱体内部空间能容纳电机、控制器、传感器等元件的前提下,尽可能优化箱型机体结构。同时,通过板件应力分析,对板件进行合理的镂空减重,在主要承载处进行加强。
3 六足机器人运动控制
3.1 三足步态规划
蚂蚁在直行运动过程中始终保持一侧中足和另一侧的前足、后足触地,两侧足反复交替摆动,实现躯干运动;在转向运动过程中,蚂蚁行进速度降低,与直行运动相似,始终保持三足触地状态,通过两侧足的差速摆动与支撑实现转向运动。基于蚂蚁直行与转向运动的特点,提出了适合六足机器人柔顺运动的三足步态规划方法。
3.1.1 直行运动规划
为了稳定行进,机器人一侧中足和另一侧的前足、后足须始终保持触地状态,即三足处于支撑相,两侧足往复交替运动不断构建收敛于路径的稳定落足三角形。因此,对机器人六足进行编组:J组为足1、3、5,O组为足2、4、6。六足机器人的直行运动如图6 所示。在初始状态,J、O组均处于支撑相,机器人接收到指令后开始运动,J组保持支撑相,O组的足端抬起处于摆动相,3个支撑足协调运动驱使机体运动,机体直行s 1 s 2 s = s 1 + s 2
图6
图6
六足机器人直行运动示意
Fig.6
Schematic of straight motion of hexapod robot
3.1.2 转向运动规划
效仿蚂蚁的转向运动,机器人的转向即为各足之间的差速运动。基节转角与机体转向角度成正比,也与基节距机体转动中心的距离r 图7 所示。机器人转向中心位于机体内、外部时转向方式的区别主要在于足2关节转角的变化方向,而转向过程基本一致。具体的转向过程如下:O组的足端处于支撑相,J组处于摆动相,支撑足协同运动驱使机体顺时针转动θ 1 θ 2 θ = θ 1 + θ 2
图7
图7
六足机器人转向运动示意
Fig.7
Schematic of turning motion of hexapod robot
3.2 足端轨迹规划
足端轨迹规划实则是解决机器人足端在落足点之间的转移路径问题。合理规划机器人足端轨迹,能够有效减弱机器人足端冲击,提高其运动柔顺性。
为了便于阐述机器人足端位置解算方法,建立六足机器人运动学坐标系,如图8 所示。其中:1)参考坐标系Σ W Σ M M M y 向,垂直于机体平面的方向为z 向,x 向遵循右手定则;3)第i Σ V i V i z 向与Σ M x 向与Σ M Σ V i z 轴的旋转角度θ i Σ M Σ V i Σ M Σ V i r i i F i Σ F i F i z 向与Σ M y 向与胫-股节平面垂直,x 向遵循右手定则。第i ϕ i φ i λ i 图8 所示。图中基节、股节、胫节的长度分别为L 0 L 1 L 2 L 0 = 0 M Σ W W P M W x M , y W y M , z W z M Σ M Σ W W R M
图8
图8
六足机器人运动学坐标系示意
Fig.8
Schematic of kinematics coordinate system of hexapod robot
根据矢量变换法,可知足端在机体坐标系与参考坐标系间的位矢映射为:
W P F i = P W P M + R W R M P M P F i (1)
M P F i = R W R M W P F i - P W P M (2)
W P F i = P W P V i + R W R V i P V i P F i W P V i = P W P M + R W R M P M P V i (3)
M P F i = P M P V i + R M R V i P V i P F i (4)
M P V i = f r i c o s θ i f r i s i n θ i 0 T (5)
式中:f
M R V i = c o s θ i - s i n θ i 0 s i n θ i c o s θ i 0 0 0 1 (6)
V i x F i = f L 0 + L 1 c o s φ i + L 2 c o s ( φ i + λ i ) c o s ϕ i V i y F i = L 0 + L 1 c o s φ i + L 2 c o s ( φ i + λ i ) s i n ϕ i V i z F i = - L 1 s i n φ i - L 2 s i n ( φ i + λ i ) (7)
综合式(4)至式(7),第i
M x F i M y F i M z F i = f r i c o s θ i + x V i x F i c o s θ i - y V i y F i s i n θ i f r i s i n θ i + x V i x F i s i n θ i + y V i y F i c o s θ i V i z F i (8)
根据式(1)至式(8)的运动学反解得到在机体坐标系下足端位置与关节转角的关系:
ϕ i = a r c t a n M y F i c o s θ i - x M x F i s i n θ i M x F i c o s θ i + y M y F i s i n θ i - f r i φ i = a r c t a n - z V i z F i L - a r c c o s L 2 + L 1 2 - L 2 2 + z M z F i 2 2 L 1 L 2 + z M z F i 2 λ i = a r c c o s L 2 - L 1 2 - L 2 2 + z M z F i 2 2 L 1 L 2 (9)
L = M x F i 2 + y M y F i 2 - 2 f r i ( x c o s θ i + y s i n θ i ) (10)
为了减弱机器人在运动时的足端接触冲击,基于机器人机体坐标系,提出了一种三角函数曲线与直线相结合的复合足端轨迹曲线,如图9 所示。图中:三角函数曲线在波峰、波谷处的斜率为0,即在A 、B 、C 、D 处的斜率为0,越靠近波峰、波谷,竖直于地面的速度分量就越小;h 1 Σ V i d 1 AB 段曲线的水平跨距,d 2 BC 段曲线的水平跨距,d 3 CD 段曲线的水平跨距。
图9
图9
六足机器人足端轨迹曲线
Fig.9
Foot end trajectory curve of hexapod robot
y A B = A 1 s i n ( ω 1 t + φ 1 ) + C 1 y B C = h y C D = A 3 s i n ( ω 3 t + φ 3 ) + C 3 (11)
式中:Ak (k =1, 3)为幅值参数;ωk 为周期参数;φk 为相位参数;Ck 为偏移参数;h =2Ak 。
通过改变A k ω k φ k C k
根据机器人复合足端轨迹,求得足端位置在机体坐标系中的解析式。
A B 段 : M x F i = M x B - x M x A M y B - y M y A y M y F i + M x A y M y B - x M x B y M y A M y B - y M y A M z F i = h 2 s i n π d 1 y M y F i + ( d 1 + d 2 ) π 2 d 1 - ( h 1 + h 2 ) M y F i ∈ M y A , y M y B (12)
B C 段 : M x F i = M x C - x M x B M y C - y M y B y M y F i + M x B y M y C - x M x C y M y B M y C - y M y B M z F i = - h 1 M y F i ∈ M y B , y M y C (13)
C D 段 : M x F i = M x D - x M x C M y D - y M y C y M y F i + M x C y M y D - x M x D y M y C M y D - y M y C M z F i = - h 2 s i n π d 3 y M y F i - ( d 2 + d 3 ) π 2 d 3 - ( h 2 + h 1 ) M y F i ∈ M y C , y M y D (14)
3.3 柔顺运动控制系统的搭建
基于机器人三足步态规划和足端轨迹规划,综合考虑机器人关节角度解算的效率问题,提出基于分级控制的柔顺运动控制方法。柔顺运动控制系统的架构如图10 所示。其主要分为三部分:整机规划层(高级层)、单足控制层(中级层)和信号处理层(低级层)。采用多模块分级处理的形式,可以极大地提高机器人运动解算的效率。
图10
图10
六足机器人柔顺运动控制系统架构
Fig.10
Architecture of compliant motion control system for hexapod robot
1)整机规划层。根据任务指令,生成相应的机器人运动参数,进行步态规划,生成步态落足点,同时协调六足与机体之间的运动及六足之间的运动,调整机体与六足的状态。该层的运算量较大,故采用高性能的PC机进行整机运动解算,并将解算后的数据通过高速CAN总线发给单足控制层和信号处理层,同时整机规划层可以越过单足控制层,直接通过信号处理层对电机进行控制。
2)单足控制层。根据整机规划层下发的机体、六足运动参数,进行足端轨迹规划,生成摆动足的足端轨迹,同时协同控制各支撑足的运动,实现机体的直行、转向运动,生成关节控制信号并进行封装处理,将信号发送给信号处理层。每个足由一个上层STM32F4系列微控制器进行运动控制。
3)信号处理层。接收来自整机规划层和单足控制层的关节控制信号,对信号进行解封、编码,并通过CAN总线将控制信号发送给各个关节电机,实现电机控制,同时对电机反馈信号进行解码、封装,将电机信号和传感器信号发送给整机规划层和单足控制层。每个电机由一个STM32F4微控制器进行控制,每个足的电机信号和传感器信号由一个STM32F1系列微控制器进行处理。
4 六足机器人运动实验
六足机器人的样机如图11 所示,其主要性能指标如表3 所示。机器人机体材质为7075铝合金,单足材质为ABS(acrylonitrile butadiene styrene,丙烯腈-丁二烯-苯乙烯共聚物),采用玻璃纤维氯丁橡胶同步带传动,电机最大输出扭矩为24 N·m。为了验证六足机器人结构的可靠性及控制系统的合理性,开展机器人在平地的直行与转向运动实验,记录机器人运动行程。
图11
图11
六足机器人样机
Fig.11
Prototype of hexapod robot
机器人足端轨迹的参数为:d 1 = 26.25 m m d 2 = 52.50 m m d 3 = 26.25 m m h 1 = 140.00 m m T = 2 s 图12 所示。J组和O组中三足的关节转角均一致,但J组与O组相差0.5 T
图12
图12
六足机器人关节转角
Fig.12
Joint angle of hexapod robot
4.1 直行运动实验
六足机器人直行运动10 s过程中的机体高度如图13 所示。由图可知:期望高度(机体底板离地面的距离)为265 mm,实际高度约低6 mm,在259 mm上下波动;机体实际高度的上限值为264 mm,下限值为255 mm;两相邻测量点之间的高度最大误差约为4.5 mm,相较机器人实际机体高度,最大误差为1.7%。机器人机体高度误差峰值多出现在六足同时触地时,即J、O两组足处于摆动相与支撑相的切换状态。
图13
图13
六足机器人直行运动过程中的机体高度
Fig.13
Body height of hexapod robot during straight motion
六足机器人直行运动轨迹如图14 所示。由图可知:实际轨迹与期望轨迹基本吻合,在第4秒左右机器人左侧偏移量最大,约为5 mm,在第8秒左右机器人右侧偏移量最大,约为6 mm。相较于机器人横向尺寸,最大误差率约为2.2%。
图14
图14
六足机器人直行运动轨迹
Fig.14
Straight motion trajectory of hexapod robot
通过改善足端材料、足端弹簧刚度、同步带刚度、同步带张紧力等,可以减小机械系统误差对机体高度的影响;通过合理规划机器人的步态参数,调整其足端轨迹曲线,可以减小控制系统误差对机器人运动精度的影响。
4.2 转向运动实验
六足机器人以49 mm/s的行进速度沿半径为600 mm的圆进行圆周转向运动,其运动轨迹如图15 所示。由图可知:由于系统误差、测量误差以及地形等因素的影响,机器人质心在圆周两侧波动,最大半径偏移量约为8 mm,相较于转向半径,偏移误差率为1.3%;两相邻测量点之间的转向半径最大误差约为13 mm,偏移误差率为2.5%;机器人实际轨迹与期望轨迹基本吻合。由于六足机器人的转向运动由若干短距离的直行运动和圆弧运动构成,其相邻两测量点的位置在期望轨迹附近波动。通过减小机器人单次运动角度和运动步长,可以提高其转向运动精度。转向半径越大,实际轨迹与期望轨迹的吻合度越高,当转向半径无穷大,即转向中心位于无穷远处时,机器人的转向运动即为直行运动。
图15
图15
六足机器人转向运动轨迹
Fig.15
Turning motion trajectory of hexapod robot
实验结果表明,机器人仿生结构设计合理,采用分级柔顺运动控制的方法可以使六足机器人实现相对平稳、柔顺的直行和转向运动,机器人结构设计及运动控制具有合理性和可靠性。
5 结 语
为了优化六足机器人仿生结构设计及提高机器人运动的柔顺性,提出了适用于六足机器人仿生结构设计的基本原则,规划了关节电机驱动六足机器人的整体仿生结构,提出了基于分级控制的六足机器人柔顺运动的控制方法,并进行了样机运动实验。结果表明,六足机器人结构设计合理,其能够实现相对柔顺、稳定的直行与转向运动。为了进一步提高六足机器人在非平整地形的柔顺运动能力,后续将在机器人步态规划方面进行进一步研究。
参考文献
View Option
[1]
[本文引用: 1]
YOU B LI K P LI J Y et al Design of synchronous steering mechanism of driving wheel for omnidirectional mobile robot
[J]. Journal of Mechanical Engineering , 2021 , 57 (1 ): 100 -109 .
DOI:10.3901/JME.2021.01.100
[本文引用: 1]
[2]
CHEN S Q LI S Y LU Z G et al Review on key technology of the hexapod robot
[J]. Mechanical & Electrical Engineering Technology , 2022 , 51 (11 ): 146 -152 .
DOI:10.3969/j.issn.1009-9492.2022.11.036
[4]
XU S L HE B HU H M Research on kinematics and stability of a bionic wall-climbing hexapod robot
[J]. Applied Bionics and Biomechanics , 2019 : 1 -17 .
[5]
ZHANG M L WANG Z LI M H et al Perception and representation of roaming terrain for a hexapod robot based on foot positions
[J]. Journal of Mechanical Engineering , 2021 , 57 (19 ): 48 -60 .
DOI:10.3901/jme.2021.19.005
[6]
LI M H ZHANG M L ZHANG J H et al Free gait planning for a hexapod robot based on reinforcement learning
[J]. Journal of Mechanical Engineering , 2019 , 55 (5 ): 36 -44 .
DOI:10.3901/jme.2019.05.036
[9]
WANG Y ZHOU S LI Y X Design and performance evaluation of amphibious hexapod robots
[J]. China Mechanical Engineering , 2022 , 43 (11 ): 274 -282 .
DOI:10.3969/j.issn.1004-132X.2022.17.009
[10]
ZHU G J TIAN W K LÜ C Z et al Control system and mechanism design for hexapod robots
[J]. Measurement & Control Technology , 2017 , 36 (1 ): 55 -58 .
DOI:10.3969/j.issn.1000-8829.2017.01.013
[11]
SHI Y L ZHANG X J ZHANG M L Design and analysis of an active-passive variable stiffness flexible joint
[J]. Journal of Mechanical Engineering , 2018 , 54 (3 ): 55 -62 .
DOI:10.3901/jme.2018.03.055
[12]
QU X X CAO D X ZHANG S Design and research of a variable stiffness compliant joint based on torsional spring
[J]. Journal of Mechanical Engineering , 2021 , 57 (13 ): 114 -123 .
DOI:10.3901/jme.2021.13.114
[13]
HUTTER M GEHRING C JUD D , et al ANYmal: A highly mobile and dynamic quadrupedal robot
[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems , Piscataway, USA : IEEE , 2016 : 38 -44 .
[14]
KATZ B G A low cost modular actuator for dynamic robots
[D]. Boston, USA : Massachusetts Institute of Technology , 2018 : 12 -33 .
[本文引用: 1]
[15]
陈媛 六足移动机器人的仿生机构设计与运动学分析
[D].天津 :河北工业大学 ,2015 :19 -52 .
[本文引用: 1]
CHEN Y Bionic mechanism design and kinematic analysis of hexapod mobile robot
[D]. Tianjin : Hebei University of Technology , 2015 : 19 -52 .
[本文引用: 1]
[17]
张雨航 ,钱亚伟 ,鲁航 六足全地形机器人结构设计
[J]. 现代机械 ,2021 (5 ):8 -11 .
[本文引用: 1]
ZHANG Y H QIAN Y W LU H Structural design of a hexapod all-terrain robot
[J]. Modern Machinery , 2021 (5 ): 8 -11 .
[本文引用: 1]
[19]
宫丽男 ,庞在祥 基于ADAMS的六足仿生机器人结构设计及运动仿真
[J].机械传动 ,2018 ,42 (3 ):49 -53 .
[本文引用: 1]
GONG L N PANG Z X Structure design and kinematic simulation of biomimetic hexapod robot based on the ADAMS
[J]. Journal of Mechanical Transmission , 2018 , 42 (3 ): 49 -53 .
[本文引用: 1]
[21]
马慧姝 ,刘艳霞 ,方建军 ,等 四足仿生机器人仿生足端轨迹规划研究
[J].东北师大学报(自然科学版) ,2019 ,51 (3 ):66 -71 .
[本文引用: 1]
MA H S LIU Y X FANG J J et al Research on bionic foot-end trajectory planning for bionic quadruped robot
[J]. Journal of Northeast Normal University (Natural Science Edition) , 2019 , 51 (3 ): 66 -71 .
[本文引用: 1]
[22]
[本文引用: 1]
CHEN R X Hexapod robot gait planning and motion simulation
[J]. Modern Manufacturing Technology and Equipment , 2020 (6 ): 35 -37 .
DOI:10.3969/j.issn.1673-5587.2020.06.013
[本文引用: 1]
单腿失效的六足机器人失稳调整与容错步态设计
1
2021
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
单腿失效的六足机器人失稳调整与容错步态设计
1
2021
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
Research on kinematics and stability of a bionic wall-climbing hexapod robot
0
2019
基于足端位置的六足机器人漫游地形感知与表征
0
2021
基于足端位置的六足机器人漫游地形感知与表征
0
2021
基于增强学习的六足机器人自由步态规划
0
2019
基于增强学习的六足机器人自由步态规划
0
2019
基于力反馈-中枢模式发生器模型的六足机器人控制器
1
2018
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
基于力反馈-中枢模式发生器模型的六足机器人控制器
1
2018
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
轮-履-腿复合仿生机器人步态规划及越障性能分析
1
2022
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
轮-履-腿复合仿生机器人步态规划及越障性能分析
1
2022
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
主-被动复合变刚度柔性关节设计与分析
0
2018
主-被动复合变刚度柔性关节设计与分析
0
2018
ANYmal: A highly mobile and dynamic quadrupedal robot
0
2016
A low cost modular actuator for dynamic robots
1
2018
... 六足机器人因具备优良的运动稳定性与地形适应性,在救灾抢险、军事侦查中发挥着重要作用[1 -7 ] .六足机器人仿生结构设计及柔顺运动控制直接影响着机器人在非平整地形上的运动性能,关系着六足机器人的应用和发展,因此始终是六足机器人研究领域的重点与难点[8 -14 ] . ...
六足移动机器人的仿生机构设计与运动学分析
1
2015
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足移动机器人的仿生机构设计与运动学分析
1
2015
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足生物的反射运动机理实验研究
1
2009
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足生物的反射运动机理实验研究
1
2009
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足全地形机器人结构设计
1
2021
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足全地形机器人结构设计
1
2021
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足仿生虎甲虫机器人结构设计与静力学分析
1
2018
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足仿生虎甲虫机器人结构设计与静力学分析
1
2018
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
基于ADAMS的六足仿生机器人结构设计及运动仿真
1
2018
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
基于ADAMS的六足仿生机器人结构设计及运动仿真
1
2018
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足机器人步态仿真与实验研究
1
2021
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足机器人步态仿真与实验研究
1
2021
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
四足仿生机器人仿生足端轨迹规划研究
1
2019
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
四足仿生机器人仿生足端轨迹规划研究
1
2019
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足机器人步态规划与运动仿真
1
2020
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...
六足机器人步态规划与运动仿真
1
2020
... 近年来,国内外围绕六足机器人仿生结构设计及柔顺运动控制已经开展了大量研究并取得了丰硕成果.如:陈媛[15 ] 基于蚂蚁和甲虫的生理结构特征,提出了适用于六足机器人结构设计的基本原则;蒋晋东等[16 ] 基于足式生物的运动特点,系统开展了竹节虫行走步态和反射特性的实验研究,剖析了竹节虫的运动特性,为六足机器人的运动规划提供了理论基础;张雨航等[17 ] 分析了蚂蚁的生理结构,综合考虑机器人的运动灵活性,通过优化机体布置形式及蚂蚁的单足足节比例,研制了可全地形运动的六足机器人;徐海燕等[18 ] 基于虎甲虫生物原型的结构特点,开展了虎甲虫单足和躯干测量实验,对比了多种单足的结构,通过优化机器人的机体结构,研制了具有高效行走能力的六足机器人;宫丽男等[19 ] 基于六足甲虫平地行走的步态,综合考虑了六足机器人的环境适应性及工作灵活性,提出了适合仿甲虫机器人的直行和转弯步态;乔栋等[20 ] 通过对蜘蛛爬行过程的观察,规划了六足机器人的三足步态运动;马慧姝等[21 ] 开展了足式生物运动观测实验,基于仿生学原理拟合了足式生物的足端轨迹,规划了适用于机器人柔顺运动的仿生足端轨迹;陈瑞晓等[22 ] 为了减弱机器人足端落地的冲击,提出了直线与抛物线相结合的分段足端轨迹曲线方案. ...


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}