关节电机驱动六足机器人仿生结构设计与柔顺运动控制
Biomimetic structure design and compliant motion control for hexapod robot driven by joint motors
关节电机驱动六足机器人仿生结构设计与柔顺运动控制 |
| 丁杨,张明路,焦鑫,李满宏 |
|
Biomimetic structure design and compliant motion control for hexapod robot driven by joint motors |
| Yang DING,Minglu ZHANG,Xin JIAO,Manhong LI |
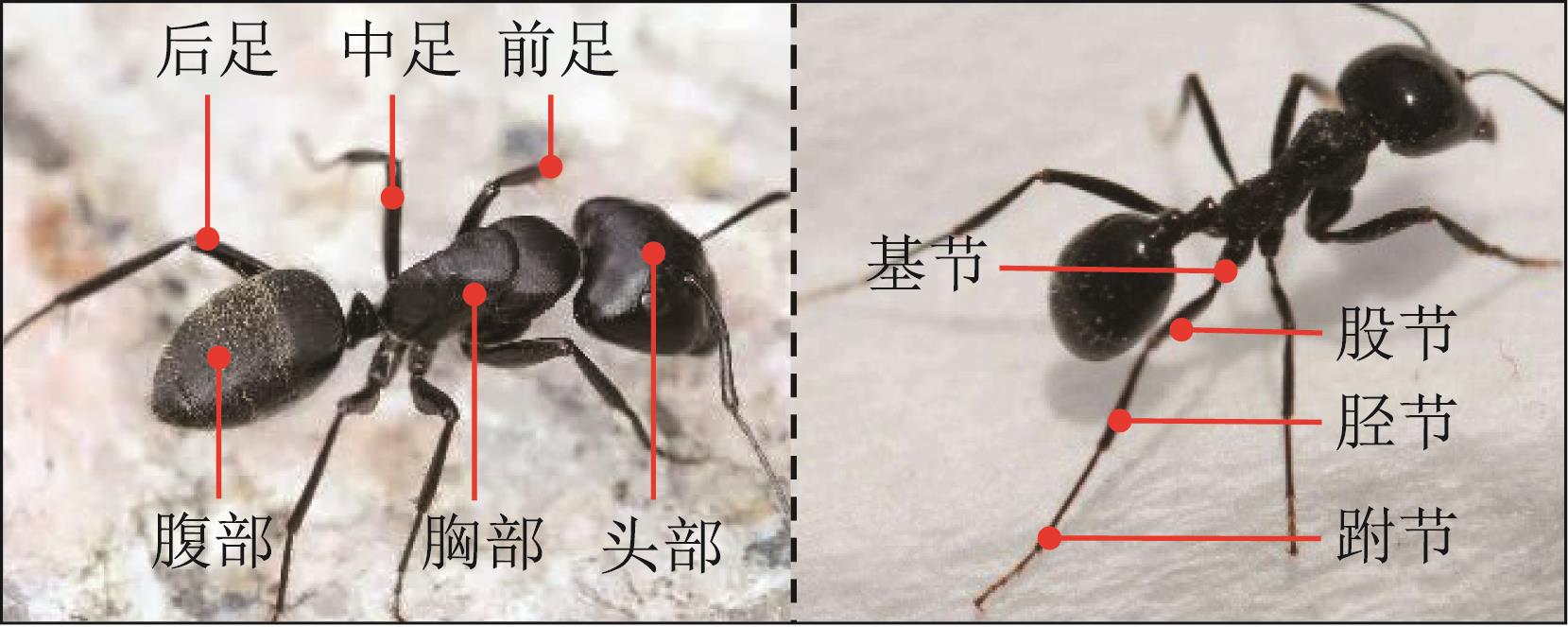
| 图1 蚂蚁生理结构 |
| Fig.1 Physiological structure of ant |
|
|