| 【Special Column】Achievement Exhibition of "2024’Science and Technology Festival for Construction Machinery Industry "-Innovative Technologies and Their Applications |
|


|
|
|
| Kinematics analysis of novel multi-stage luffing mechanism of piling rig |
Huacheng DENG1( ),Huimei KANG1(),Zhenxin ZHU2,3,Xilin TANG1 ),Huimei KANG1(),Zhenxin ZHU2,3,Xilin TANG1 |
1.College of Engineering and Design, Hunan Normal University, Changsha 410081, China
2.National Enterprise Technology Center, Sunward Intelligent Equipment Co. , Ltd. , Changsha 410100, China
3.Hunan Provincial Engineering Research Center for Underground Engineering Equipment, Changsha 410100, China |
|
|
|
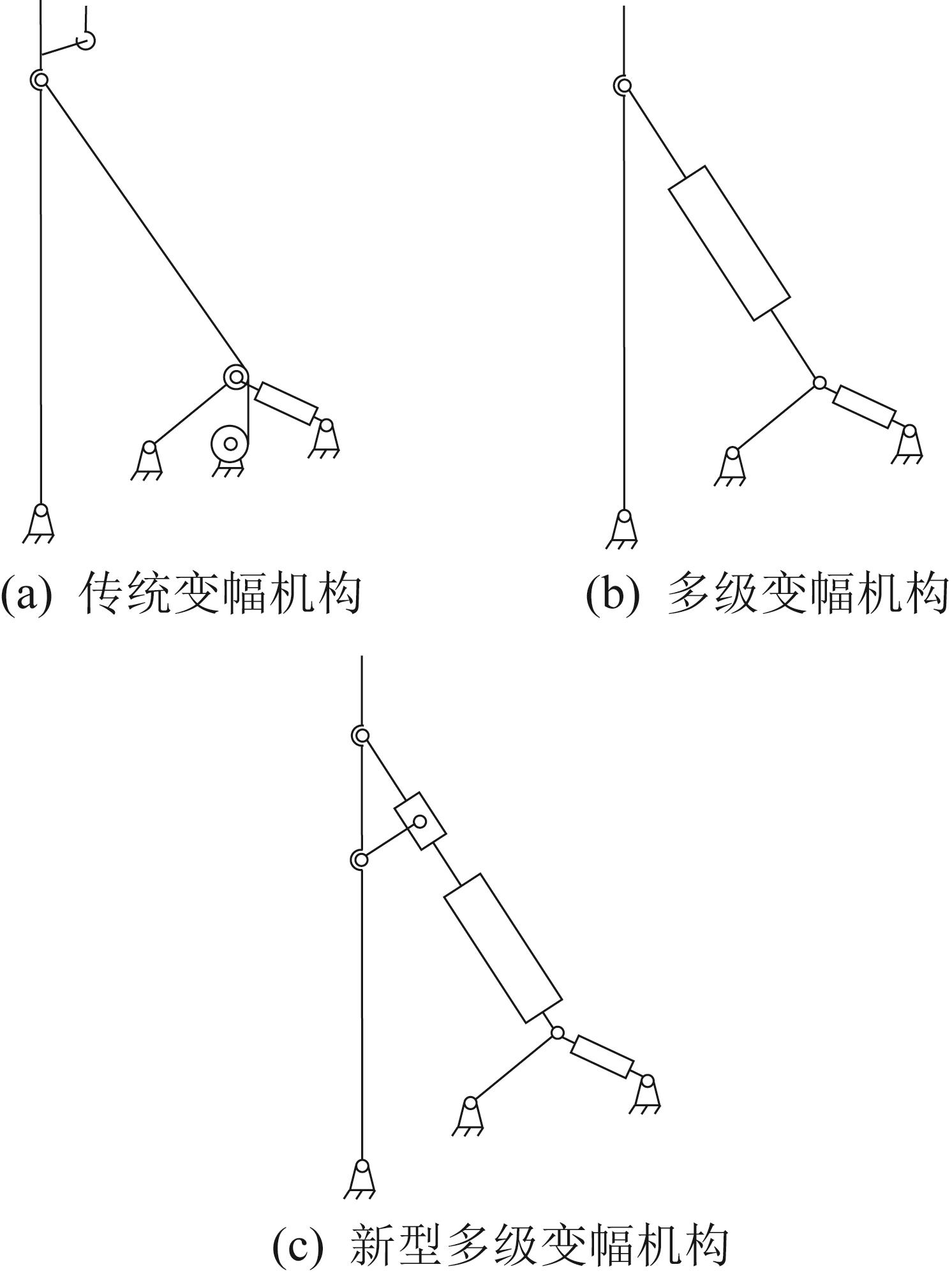
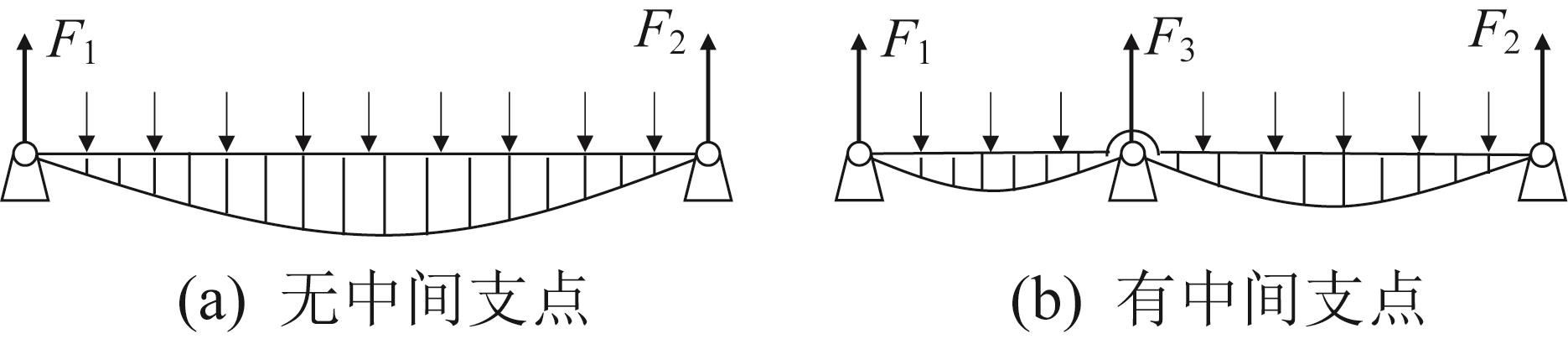
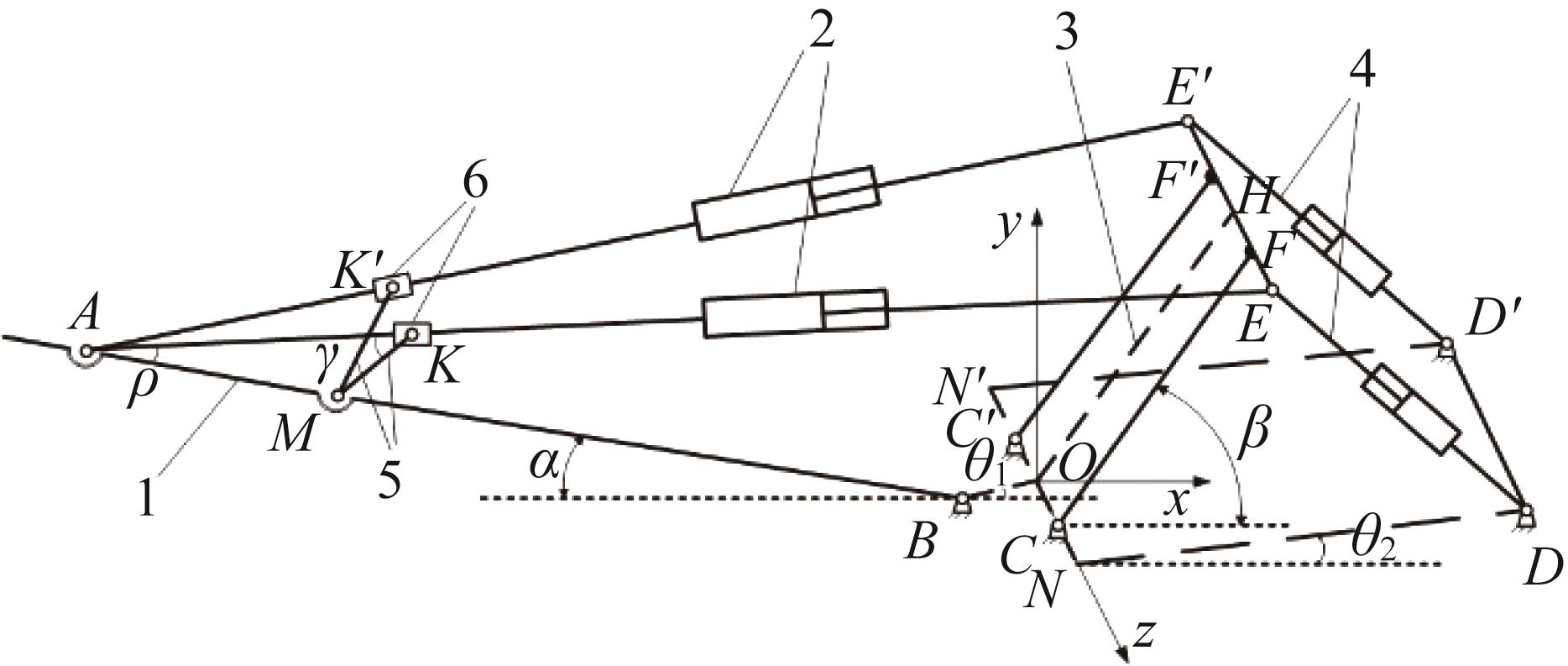
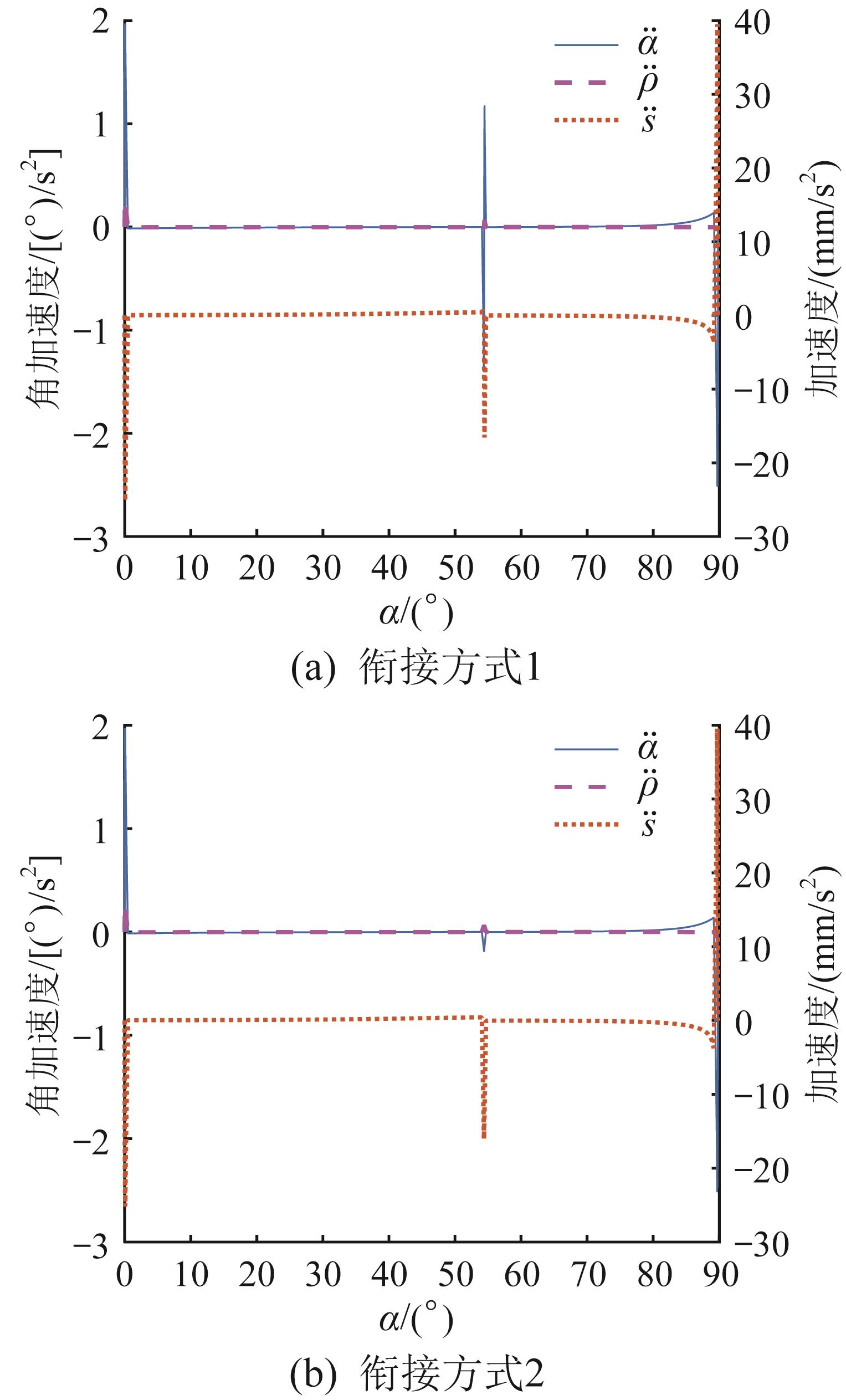
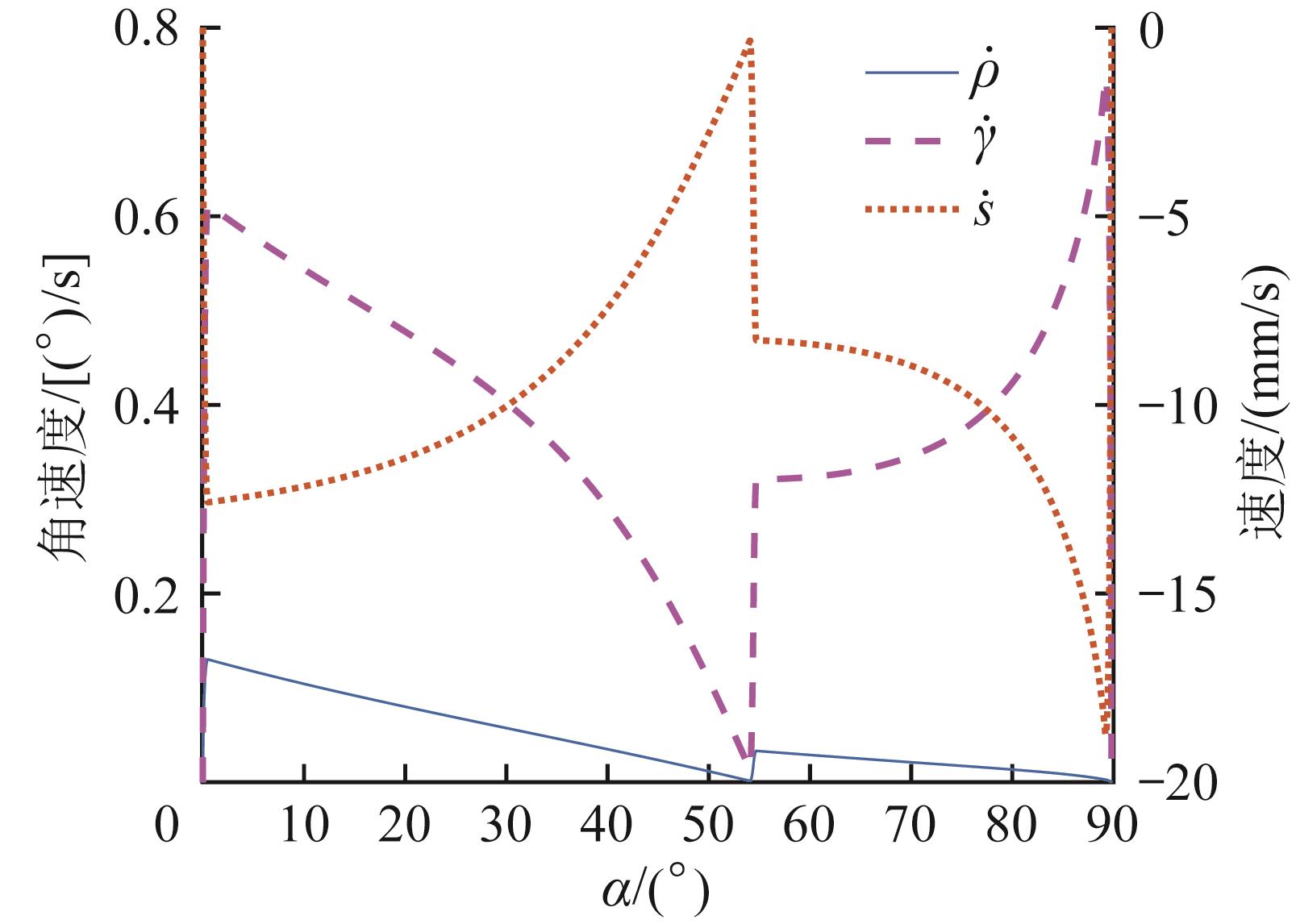
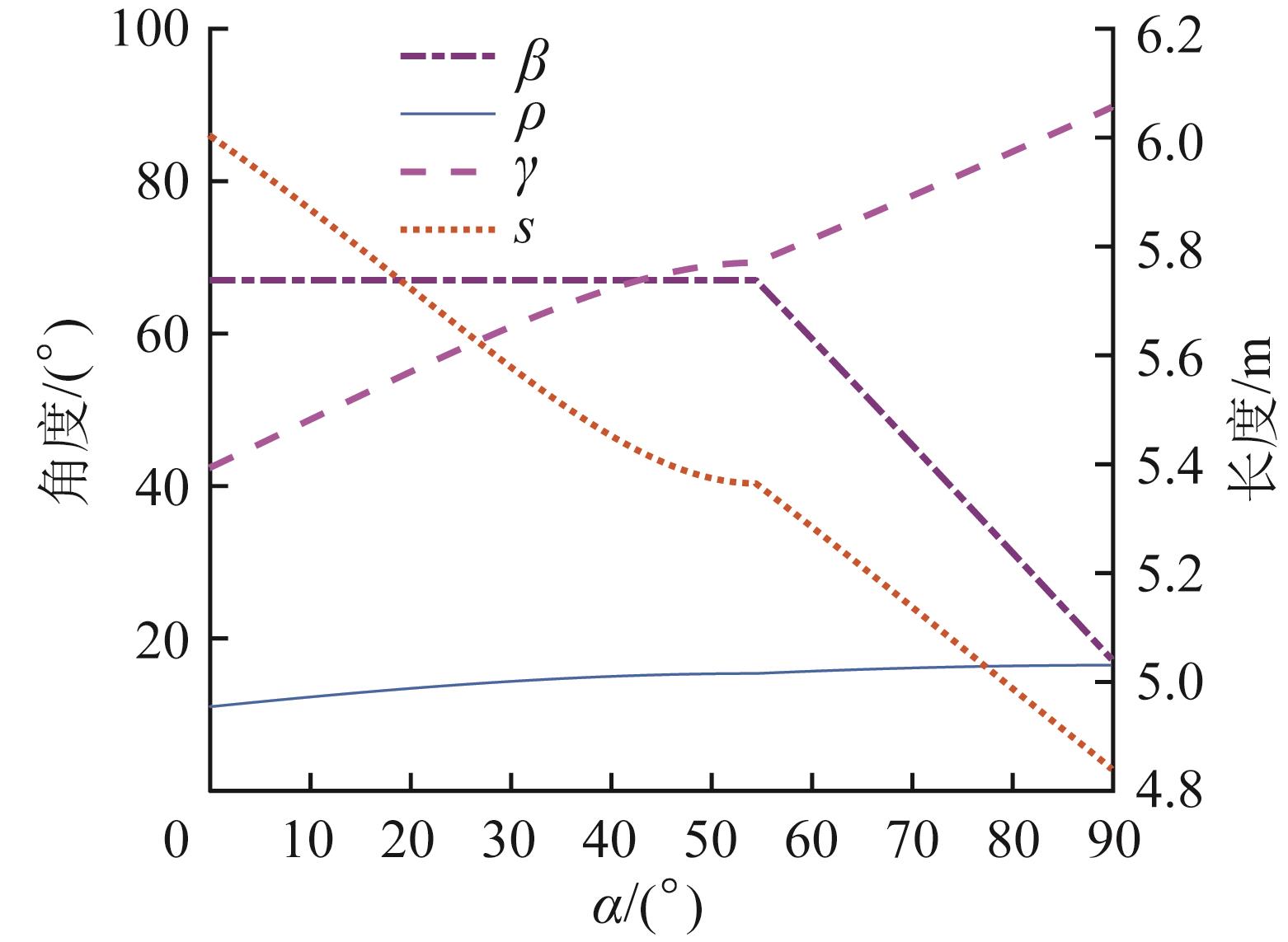
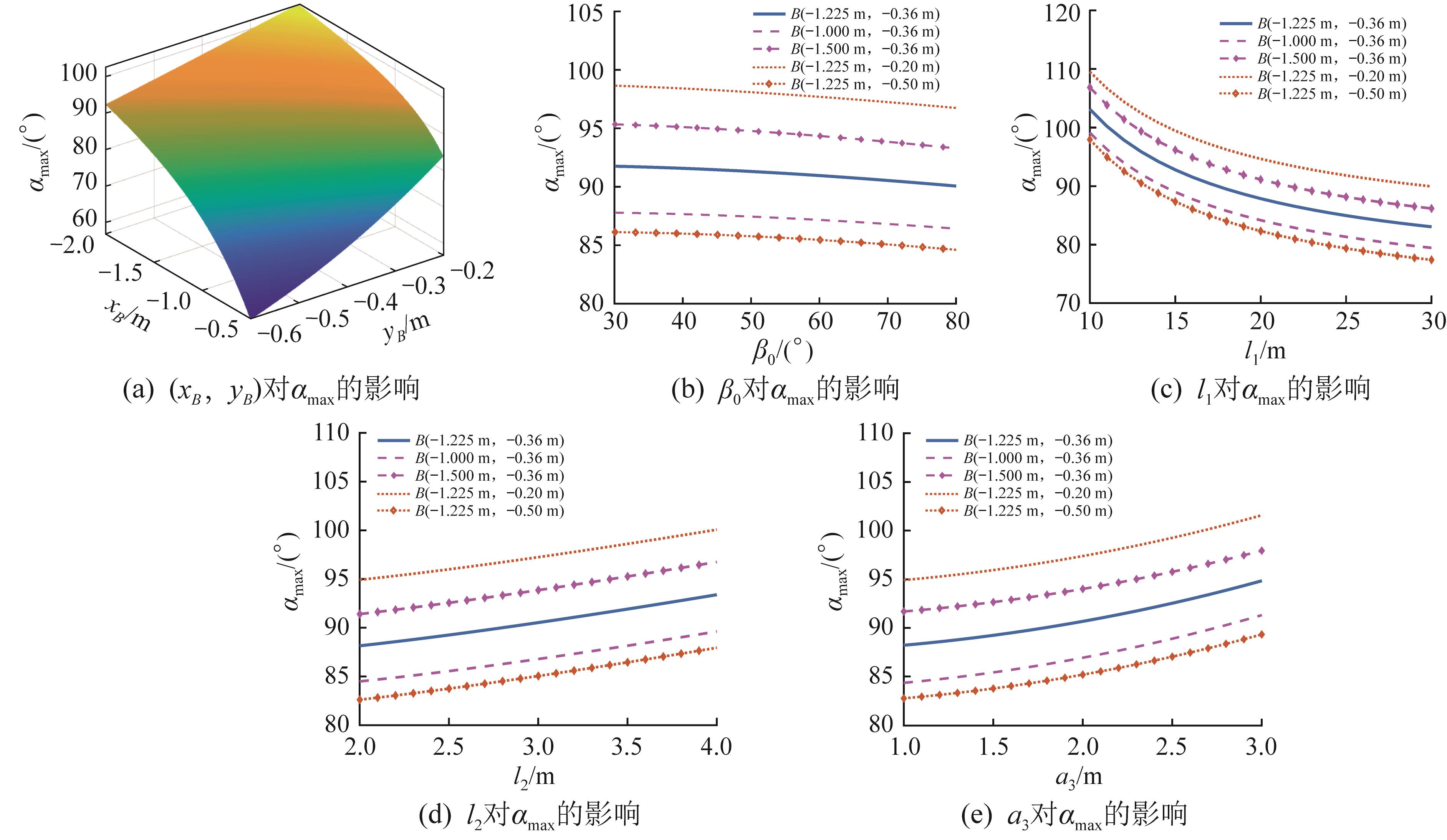
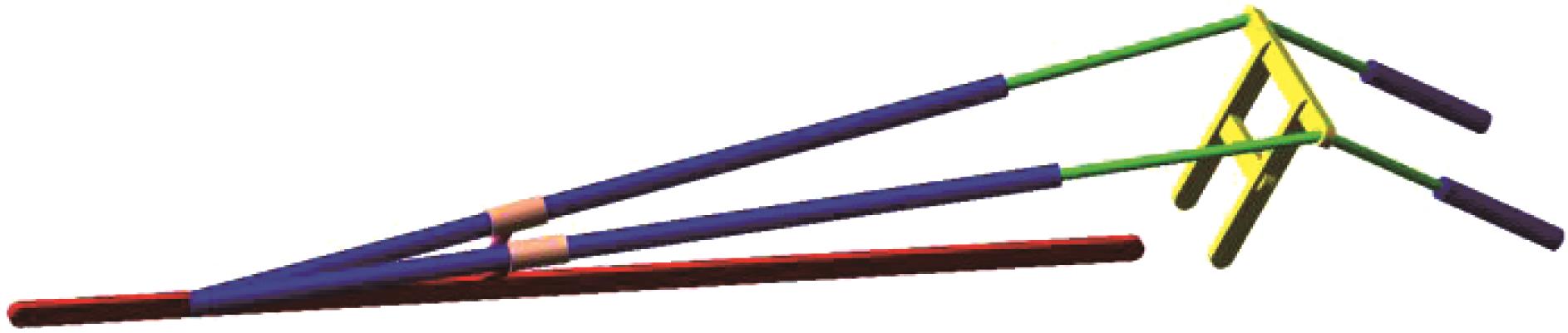
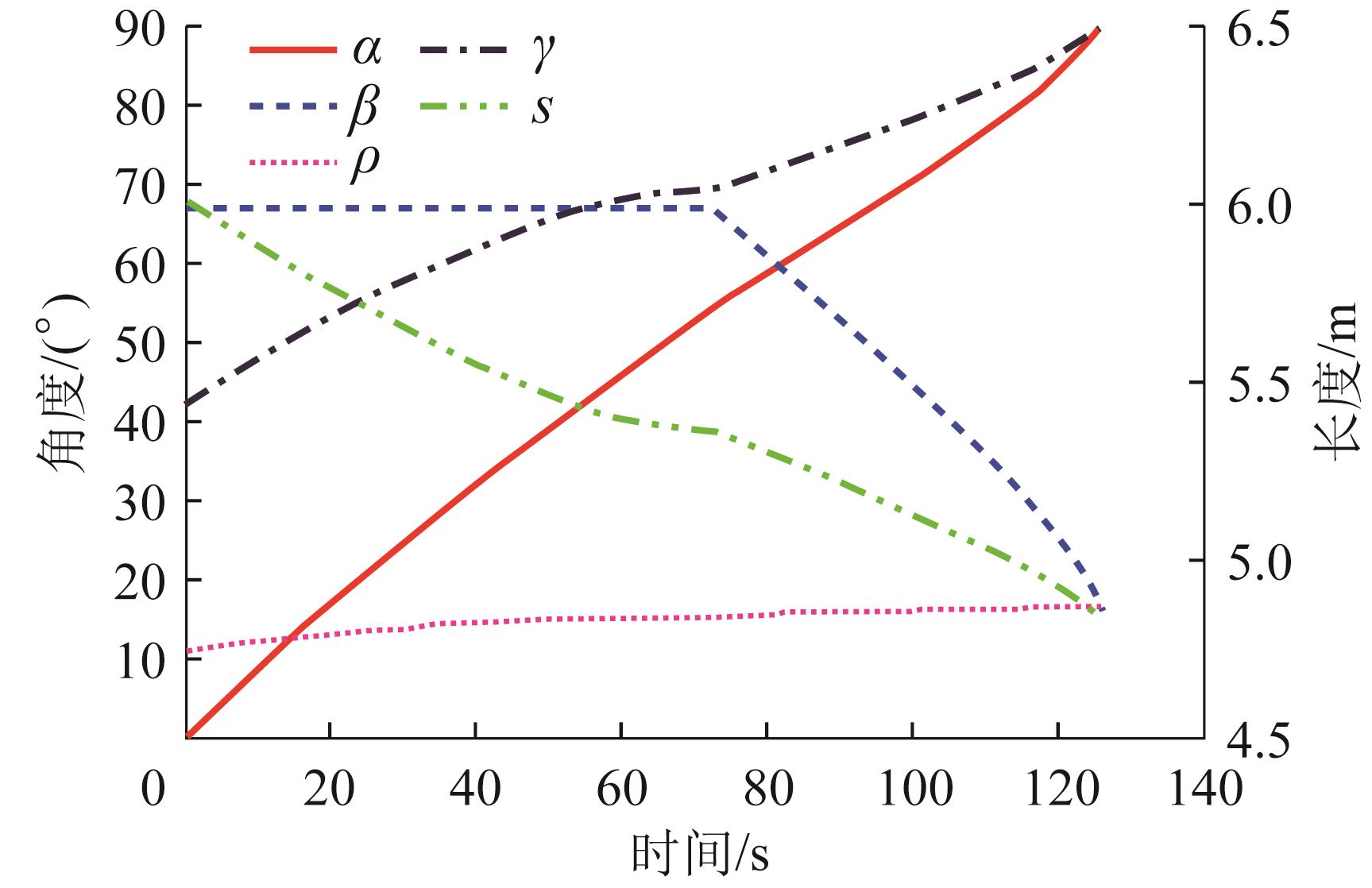
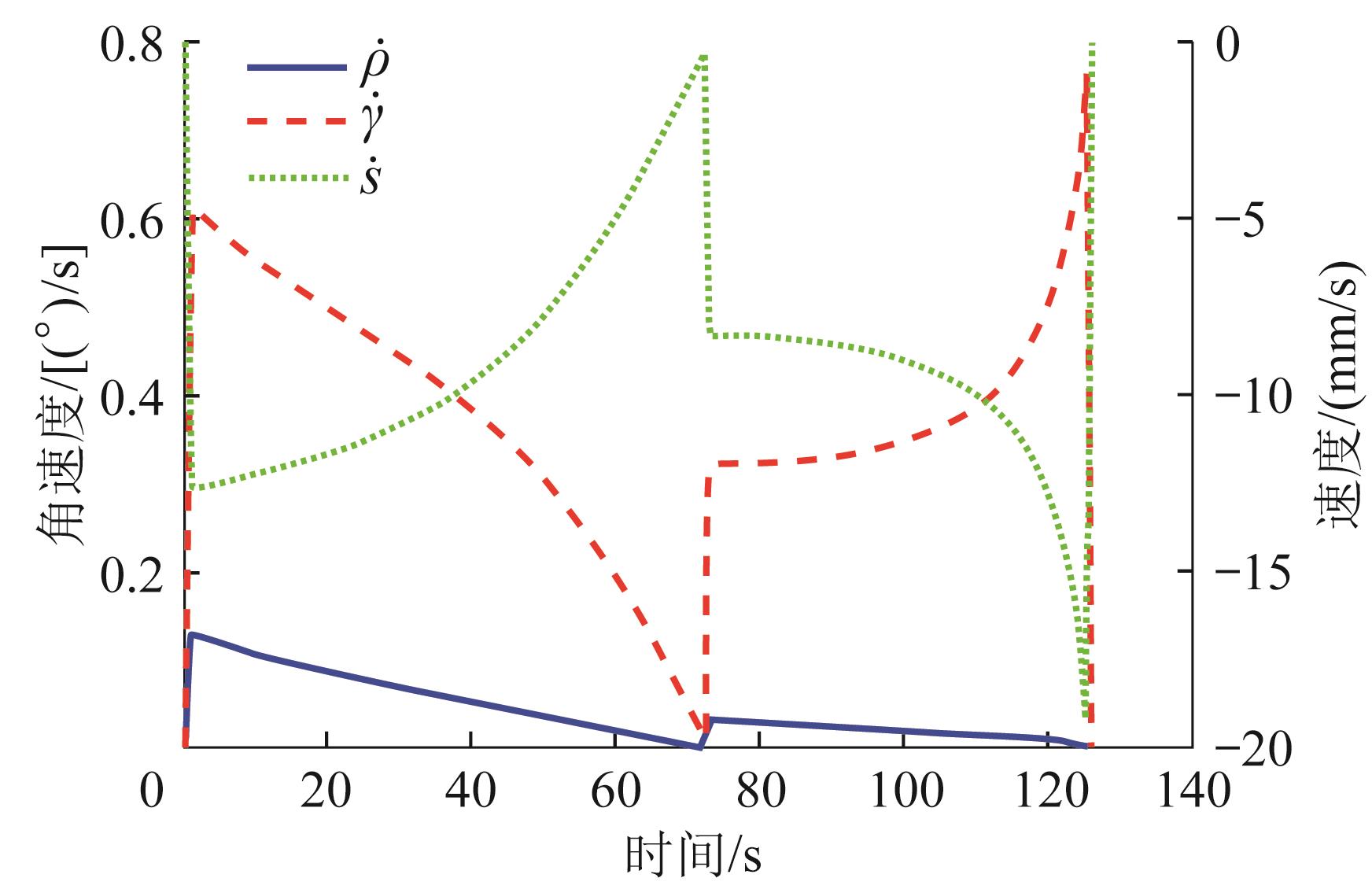
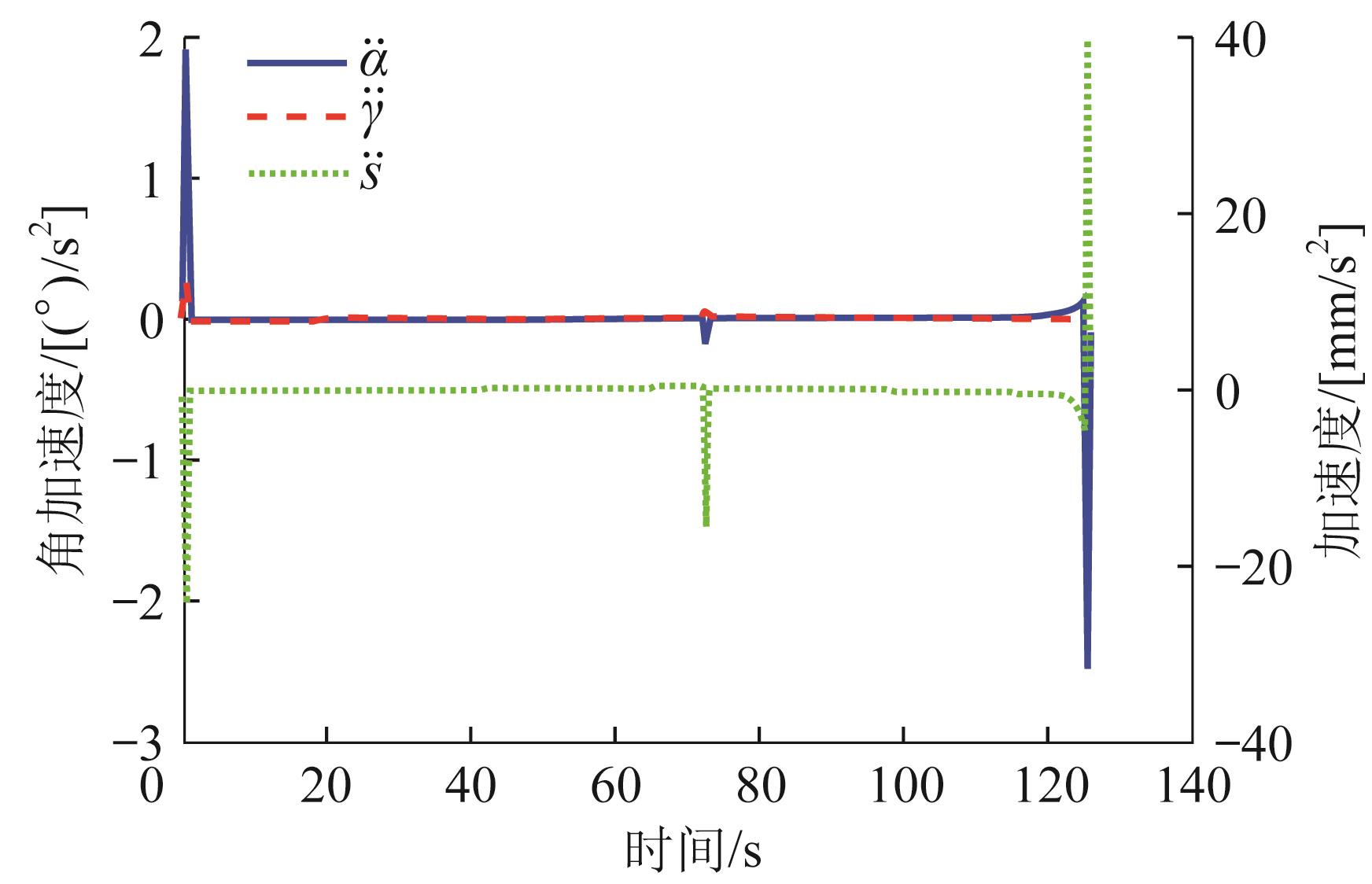
Abstract In order to improve the stress condition of piling rig, a novel multi-stage luffing mechanism of piling rig was proposed. The mechanism could effectively reduce the bending moment of the front hydraulic cylinder and improve the stability of piling rig during operation. Firstly, the spatial coordinate system was established, and the forward and inverse solutions of the spatial position of the mechanism were analyzed, and then the velocity Jacobian matrix and acceleration Hessian matrix were derived, and the kinematics model of the mechanism was obtained. Secondly, after the mechanism parameters and the displacement function of the hydraulic cylinder were set according to the luffing conditions, the motion characteristics of the mechanism were analyzed using MATLAB software, the connection mode of the hydraulic cylinder contraction was determined, and the influence of the mechanism parameters on the luffing motion was further analyzed. Finally, the ADAMS simulation results of luffing motion of the mechanism were compared with the theoretical analysis results. The results showed that the kinematics model of the multi-stage luffing mechanism was correct. The mechanism could steadily luff the column from horizontal to vertical, the slider always moved upward during the luffing process, and the connecting rod after luffing was vertical to the front hydraulic cylinder. Accelerating contraction of the rear hydraulic cylinder while decelerating contraction of the front hydraulic cylinder was conducive to stable luffing. The research results can provide a reference for the dynamics analysis and optimal design of the novel multi-stage luffing mechanism of piling rig.
|
|
Received: 17 April 2024
Published: 31 December 2024
|
|
|
|
Corresponding Authors:
Huimei KANG
E-mail: 3046371611@qq.com;plum_007@sina.com
|
新型桩架多级变幅机构运动学分析
为了改善桩架的受力情况,提出了一种新型桩架多级变幅机构。该机构能有效减小前液压缸的弯矩,提高桩架在作业时的稳定性。首先,建立了空间坐标系,分析了该机构空间位置的正解和反解,继而推导出速度雅可比矩阵和加速度海森矩阵,得到了该机构的运动学模型;其次,根据变幅条件设定了机构参数和液压缸位移函数后,采用MATLAB软件分析了机构的运动特性,确定了液压缸收缩动作的衔接方式,并进一步分析了机构参数对变幅运动的影响;最后,将机构变幅运动的ADAMS仿真结果与理论分析结果进行对比。结果表明:所构建的多级变幅机构的运动学模型正确;机构可以平稳地将立柱从水平变幅至竖直,变幅过程中滑块始终上移,变幅后连杆与前液压缸垂直;在前液压缸减速收缩的同时进行后液压缸加速收缩有利于变幅平稳。研究结果可为新型桩架多级变幅机构的动力学分析和优化设计提供参考。
关键词:
桩架,
变幅机构,
运动学分析,
参数设计,
仿真
|
|
| [1] |
刘古岷, 王渝, 胡国庆, 等. 桩工机械[M]. 北京: 机械工业出版社, 2001.
LIU G M, WANG Y, HU G Q, et al. Piling machinery[M]. Beijing: China Machine Press, 2001.
|
|
|
| [2] |
陶宁. 桩架立柱结构优化设计[D]. 长沙: 湖南师范大学, 2021.
TAO N. Structural optimization design of the mast of pile frame[D]. Changsha: Hunan Normal University, 2021.
|
|
|
| [3] |
徐建,郭传新.全液压履带式桩架的研发与应用[C]//中国建筑学会地基基础学术大会论文集(2022). 北京:中国建筑出版传媒有限公司,2023. doi:10.52202/070275-0129
XU J, GUO C X. Development and application of hydraulic crawler piling rig[C]//Proceedings of the Chinese Society of Architecture Foundation Academic Conference (2022). Beijing:China Architecture Publishing Media Co., Ltd., 2023.
doi: 10.52202/070275-0129
|
|
|
| [4] |
张希恒, 赵永刚, 陈建业. 步履式打桩架立柱受力分析计算[J]. 甘肃科技, 2004, 20(5): 96-97.
ZHANG X H, ZHAO Y G, CHEN J Y. Analysis and calculation of the force on the column of the walking piling rig[J]. Gansu Science and Technology, 2004, 20(5): 96-97.
|
|
|
| [5] |
张希恒, 陈建业, 赵永刚. 步履式打桩架立柱稳定性分析[J]. 甘肃科学学报, 2004, 16(4): 99-101.
ZHANG X H, CHEN J Y, ZHAO Y G. Stability analysis of the leader of the walking pile frame[J]. Journal of Gansu Sciences, 2004, 16(4): 99-101.
|
|
|
| [6] |
曾礼平. 基于CAE技术的打桩机桩架结构分析及优化设计[D]. 南京: 南京航空航天大学, 2012.
ZENG L P. Structural analysis and optimal design of pile driver frame based on CAE technology[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012.
|
|
|
| [7] |
刘振东, 赵文欣, 赵伟民. 桩架的起架油缸铰座的分析计算[J]. 科学技术与工程, 2012, 12(12): 2942-2946. doi:10.3969/j.issn.1671-1815.2012.12.039
LIU Z D, ZHAO W X, ZHAO W M. The analysis and calculation of the oil cylinder in raising pillar hinged shaft pedestal of pile frame[J]. Science Technology and Engineering, 2012, 12(12): 2942-2946.
doi: 10.3969/j.issn.1671-1815.2012.12.039
|
|
|
| [8] |
安治鹏. 某履带式桩架稳定性研究及部分结构仿真分析[D]. 北京: 北京林业大学, 2017.
AN Z P. Study on integral stability and part of the crawler pile frame simulation analysis[D]. Beijing: Beijing Forestry University, 2017.
|
|
|
| [9] |
钱奂云, 邓超, 刘进学, 等. 大型全液压履带桩架的技术创新与产品开发(续)[J]. 建筑机械, 2017(9): 17-21.
QIAN H Y, DENG C, LIU J X, et al. Technical innovation and product development of large-scale fully hydraulic crawler piling rig (continued)[J]. Construction Machinery, 2017(9): 17-21.
|
|
|
| [10] |
顾林坤, 郭勇, 钱奂云, 等. 大型桩架多缸立桅机构设计与分析[J]. 机械设计, 2017, 34(4): 7-11.
GU L K, GUO Y, QIAN H Y, et al. Design and analysis of multiple hydraulic cylinder mast erecting mechanism for large pile frame[J]. Journal of Machine Design, 2017, 34(4): 7-11.
|
|
|
| [11] |
曹博, 朱建新, 朱振新. 桩架新型变幅机构的动力学分析[J]. 机械科学与技术, 2020, 39(4): 501-507.
CAO B, ZHU J X, ZHU Z X. Dynamic analysis of new variable amplitude mechanism of pile frame[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(4): 501-507.
|
|
|
| [12] |
朱振新, 朱建新, 唐博豪, 等. 多级组合型大角度变幅机构的动力学特性[J]. 中南大学学报(自然科学版), 2019, 50(6): 1334-1342.
ZHU Z X, ZHU J X, TANG B H, et al. Dynamics characteristics of multi-stage combined type large angle luffing mechanism[J]. Journal of Central South University (Science and Technology), 2019, 50(6): 1334-1342.
|
|
|
| [13] |
ZHU Z X, ZHU J X, KANG H M, et al. Dynamic modeling of a series multi closed chain two degree of freedom variable amplitude mechanism[J]. Journal of Central South University, 2021, 28(1): 168-178.
|
|
|
| [14] |
康辉梅, 朱建新, 王石林. 混合链式液压调平机构的动力学特性[J]. 中南大学学报(自然科学版), 2019, 50(3): 557-563.
KANG H M, ZHU J X, WANG S L. Dynamic characteristic of hydraulic leveling mechanism with a hybrid kinematic chain[J]. Journal of Central South University (Science and Technology), 2019, 50(3): 557-563.
|
|
|
| [15] |
康辉梅, 许怡赦, 金耀. 伸缩臂叉装车工作装置运动学分析[J]. 机械设计, 2015, 32(5): 39-42.
KANG H M, XU Y S, JIN Y. Kinematic analysis for working device of telehandler[J]. Journal of Machine Design, 2015, 32(5): 39-42.
|
|
|
| [16] |
陈明方, 黄良恩, 张永霞, 等. 3-PUU并联机构的运动学分析与验证[J]. 工程设计学报, 2023, 30(6): 763-778. doi:10.3785/j.issn.1006-754X.2024.03.157
CHEN M F, HUANG L G, ZHANG Y X, et al. Kinematics analysis and validation of 3-PUU parallel mechanism[J]. Chinese Journal of Engineering Design, 2023, 30(6): 763-778.
doi: 10.3785/j.issn.1006-754X.2024.03.157
|
|
|
| [17] |
赵万博, 陈赛旋, 姜官武, 等. 新型线驱动式微创手术器械结构设计与运动学分析[J]. 工程设计学报, 2023, 30(6): 657-666. doi:10.3785/j.issn.1006-754X.2023.03.131
ZHAO W B, CHEN S X, JIANG G W, et al. Structural design and kinematics analysis of new cable-driven minimally invasive surgical instrument[J]. Chinese Journal of Engineering Design, 2023, 30(6): 657-666.
doi: 10.3785/j.issn.1006-754X.2023.03.131
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|