| Robotic and Mechanism Design |
|


|
|
|
| Kinematics analysis of scissor deployable mechanism with variable Poisson motion characteristics |
Boyan CHANG1,2( ),Shengjie YAN1,Dong LIANG1,2,Xin GUAN1,Fangxiao HAN1 ),Shengjie YAN1,Dong LIANG1,2,Xin GUAN1,Fangxiao HAN1 |
1.School of Mechanical Engineering, Tiangong University, Tianjin 300387, China
2.Tianjin Key Laboratory of Advanced Mechatronics Equipment Technology, Tianjin 300387, China |
|
|
|
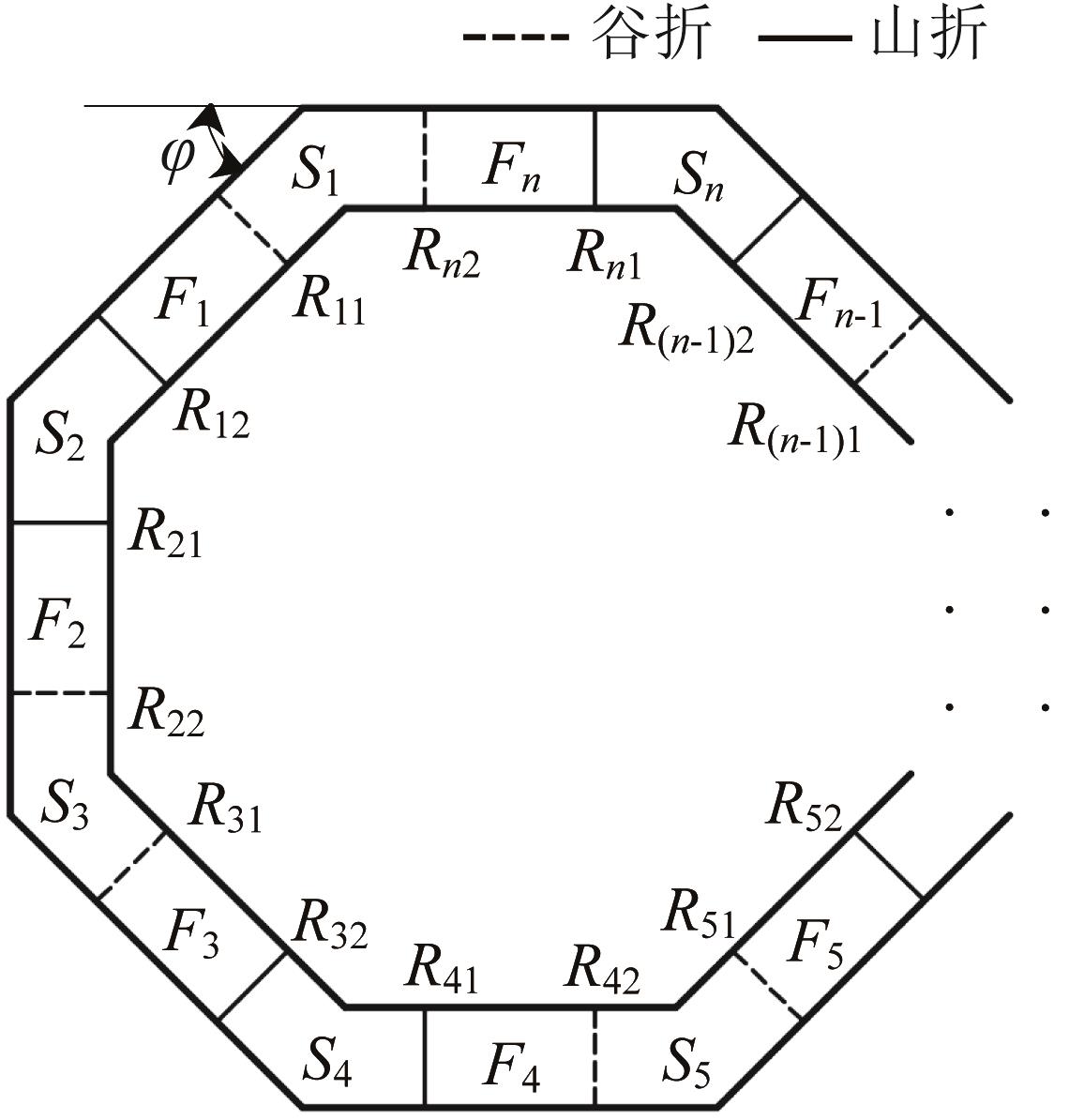
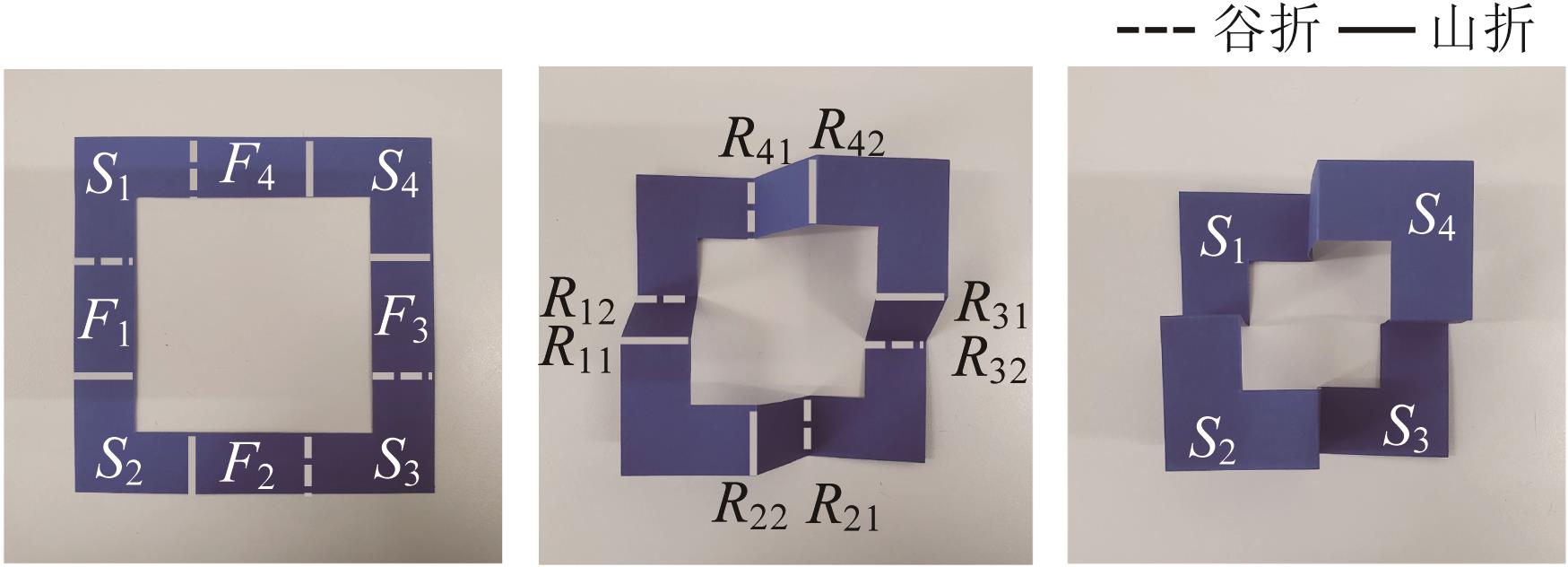
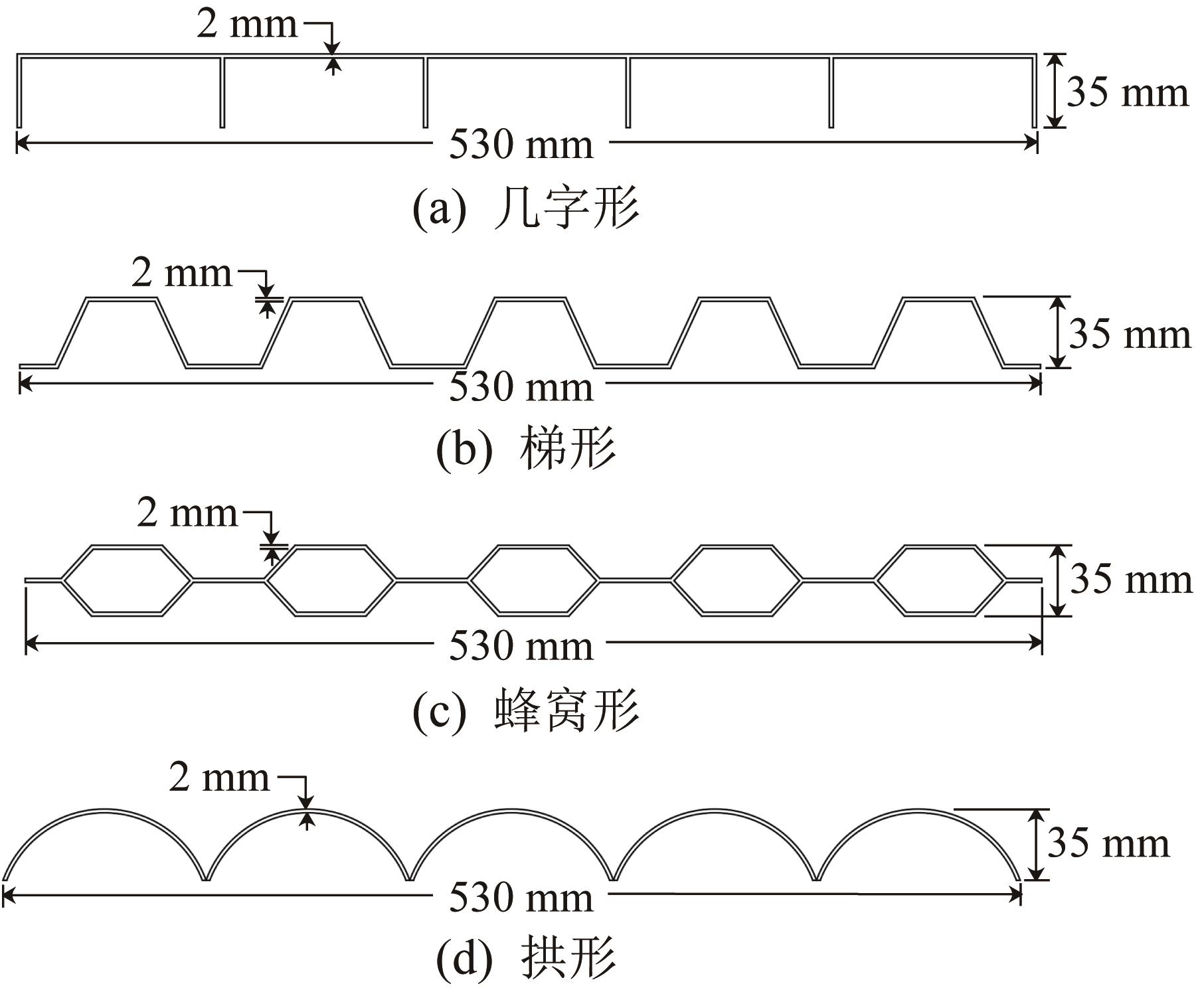
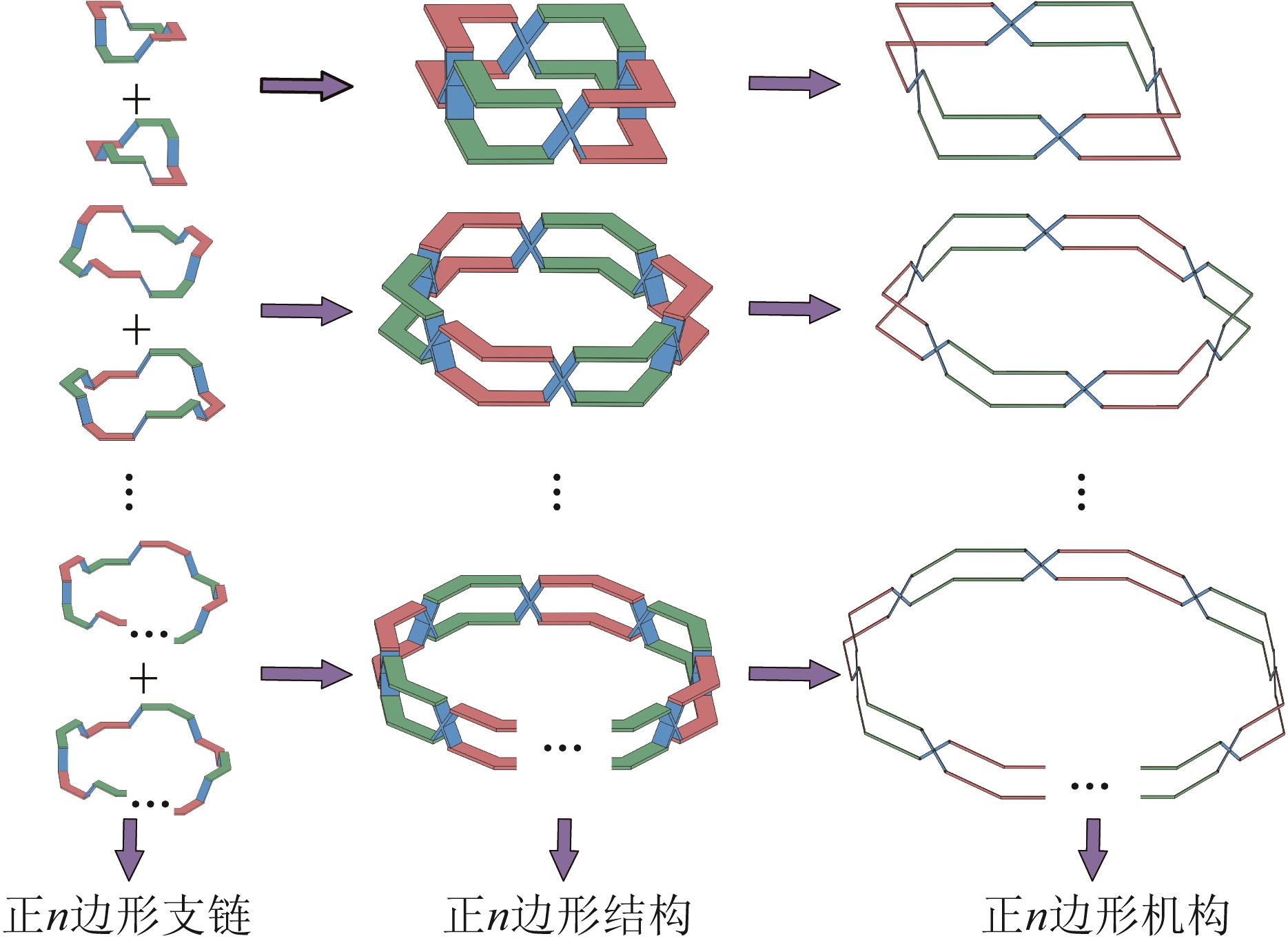
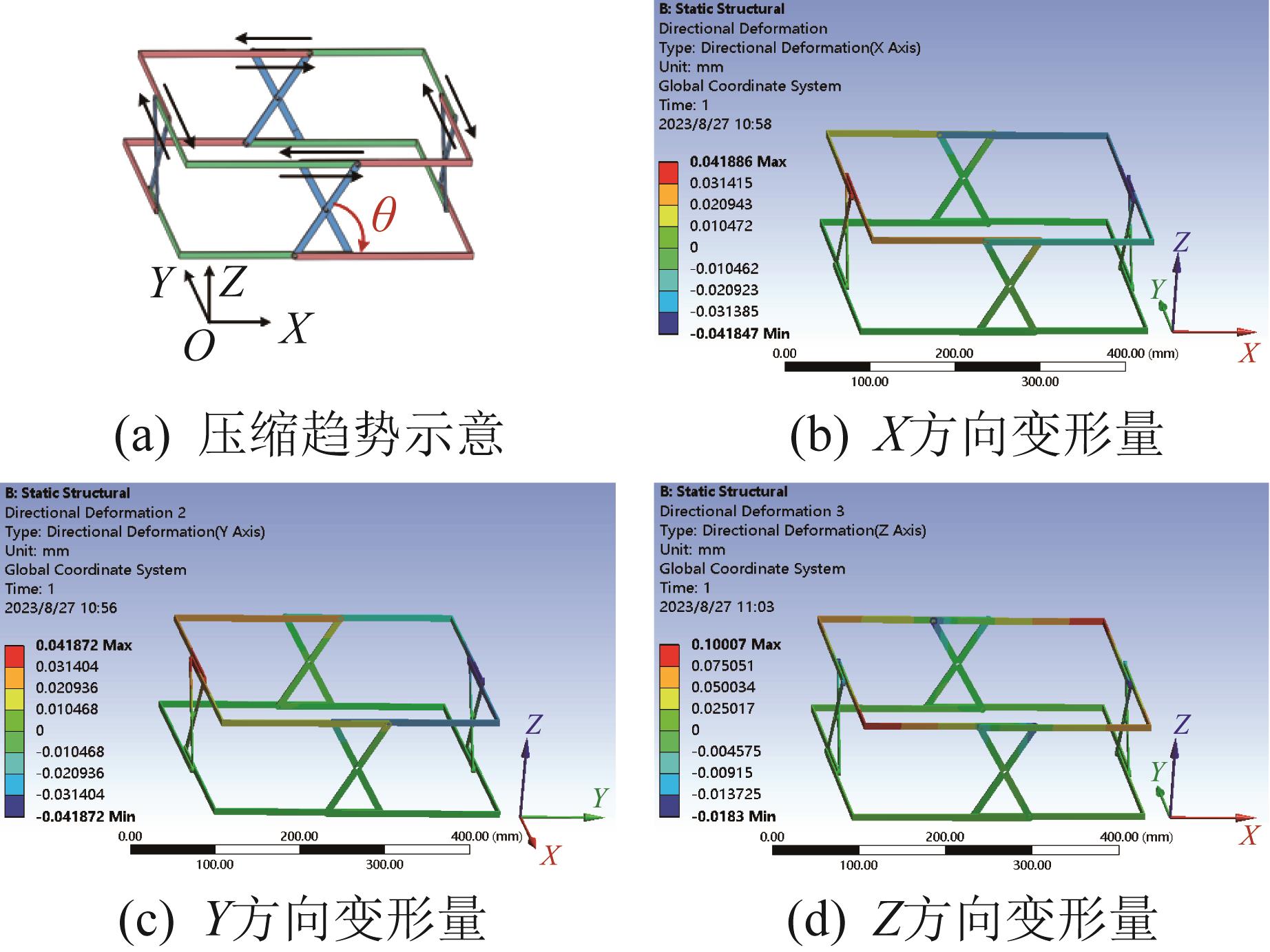
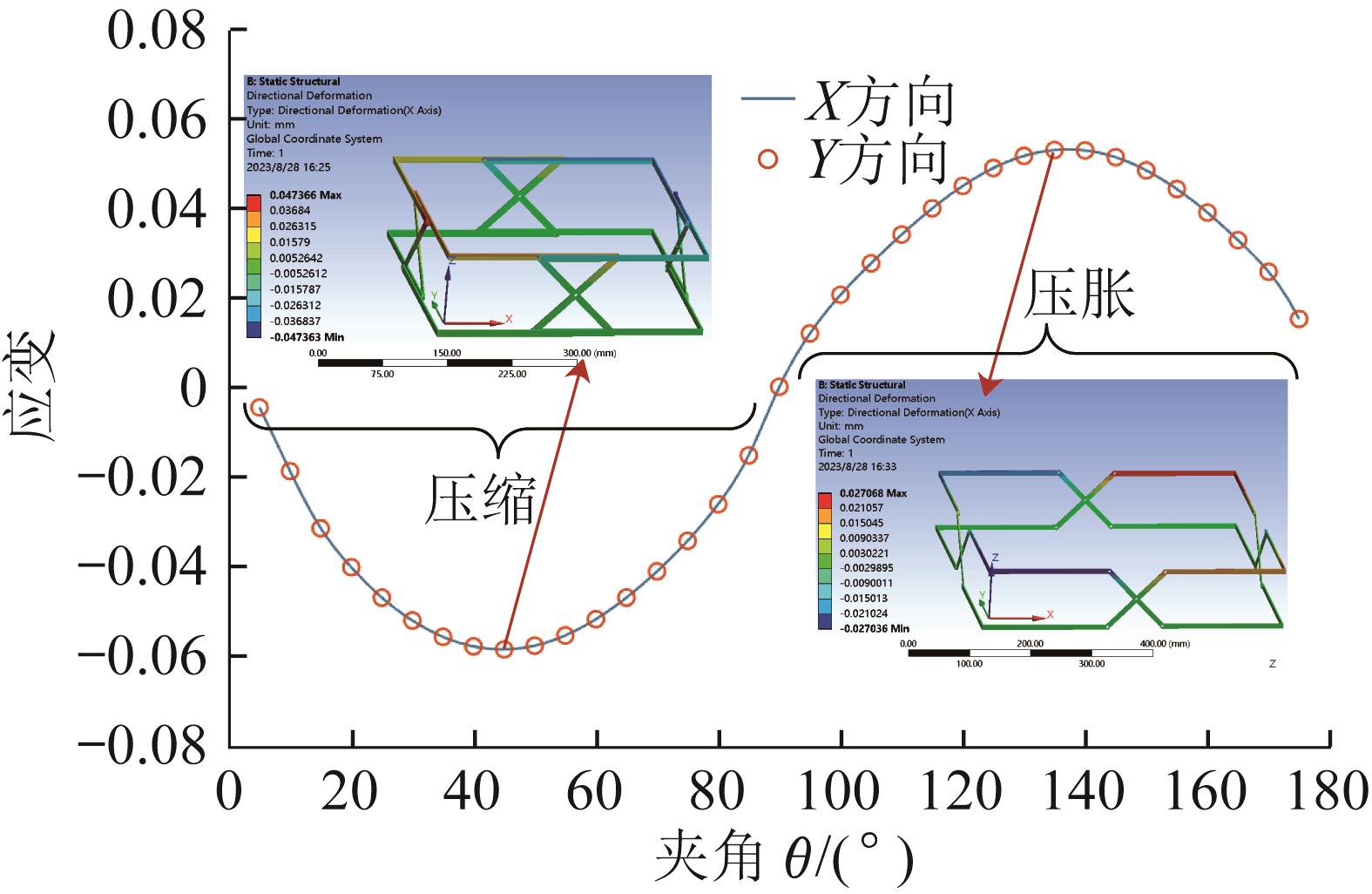
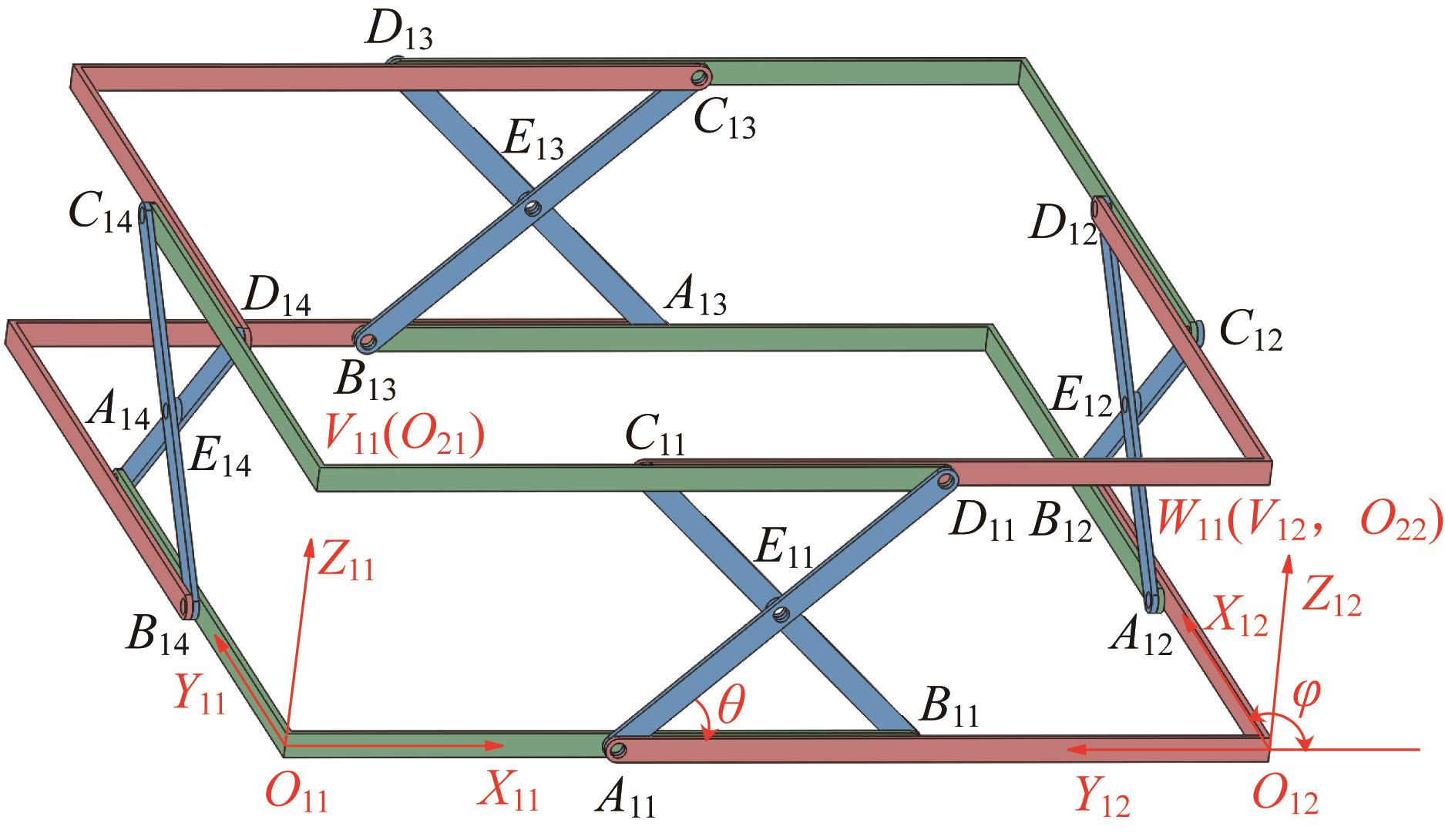
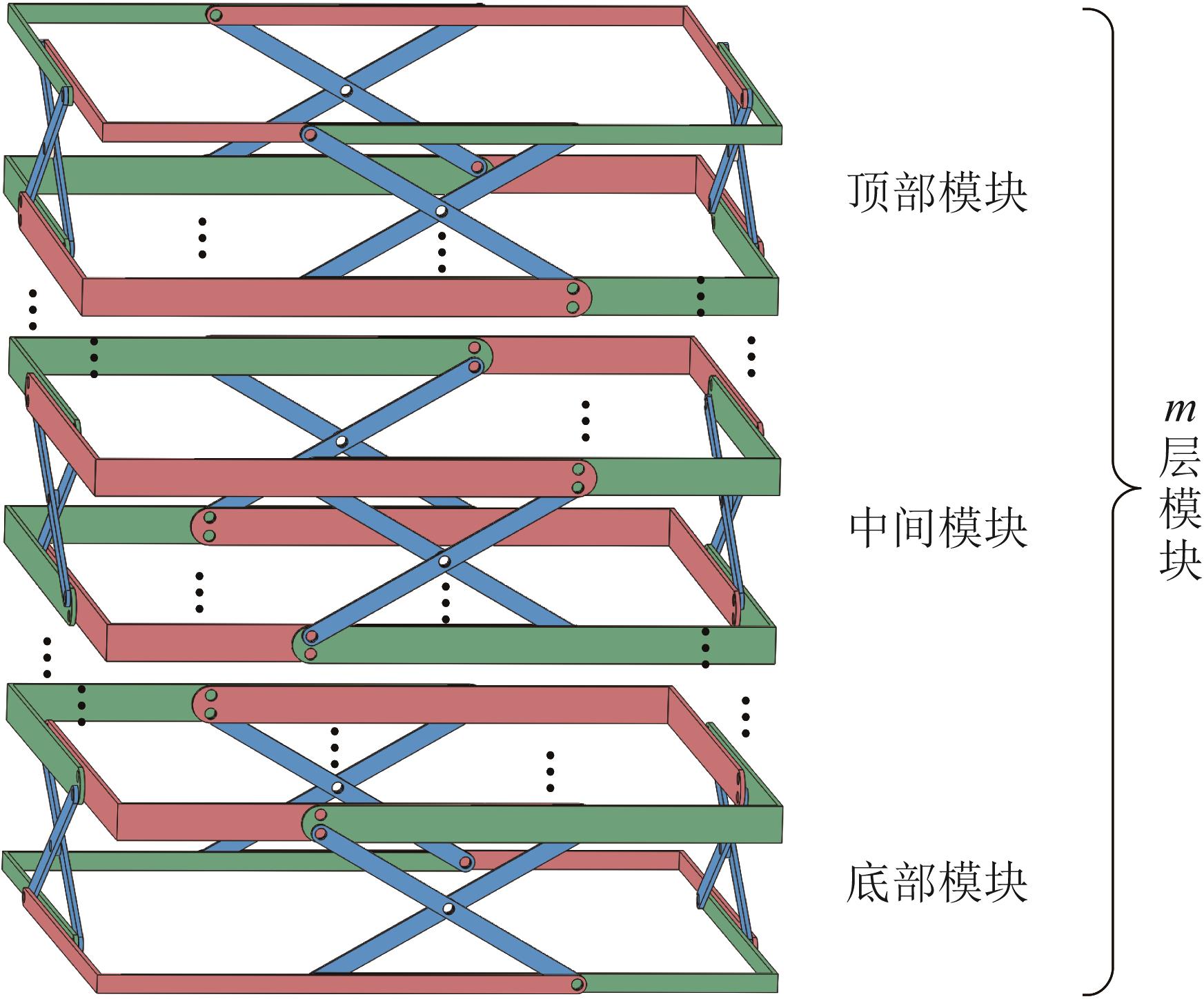
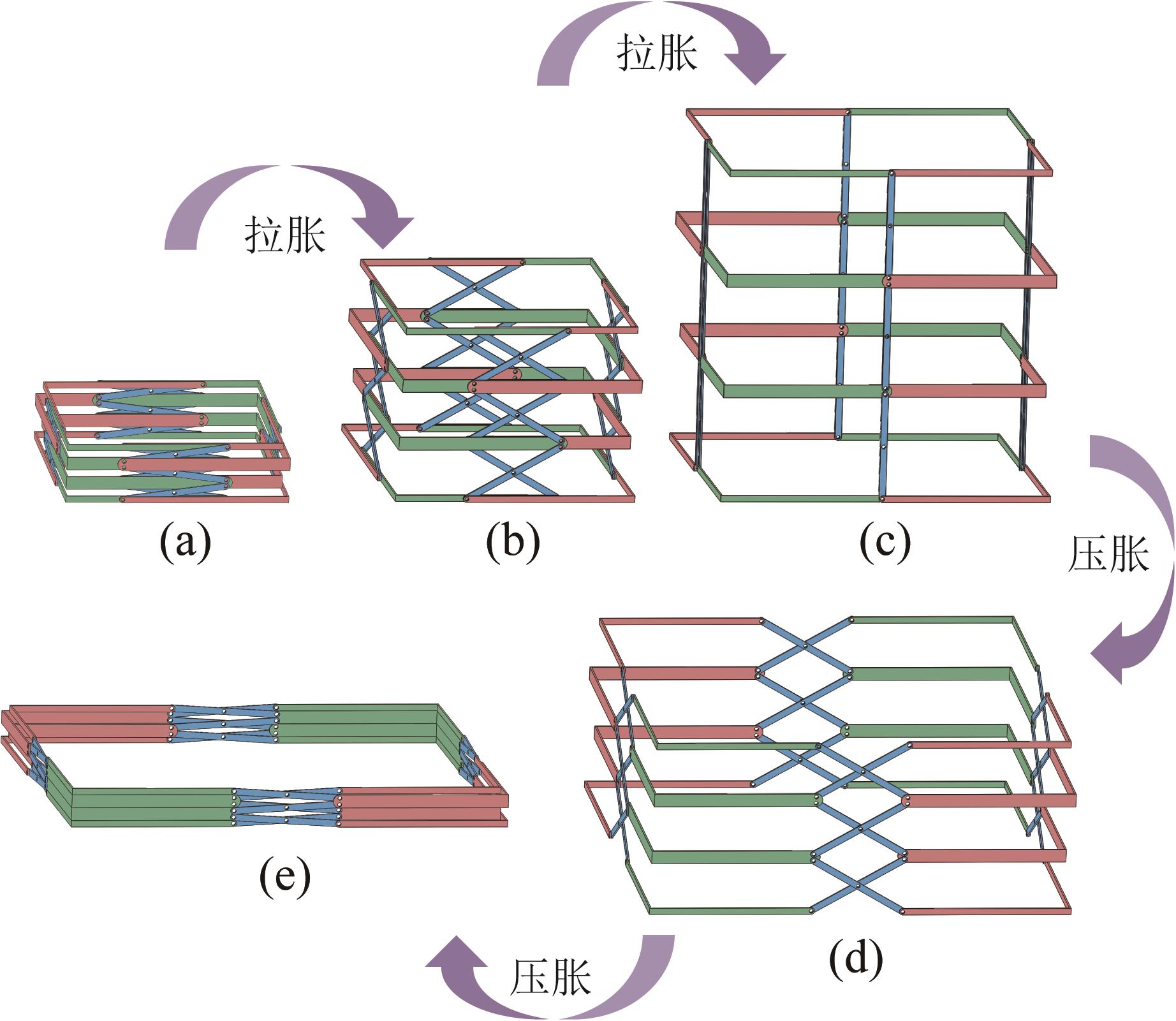
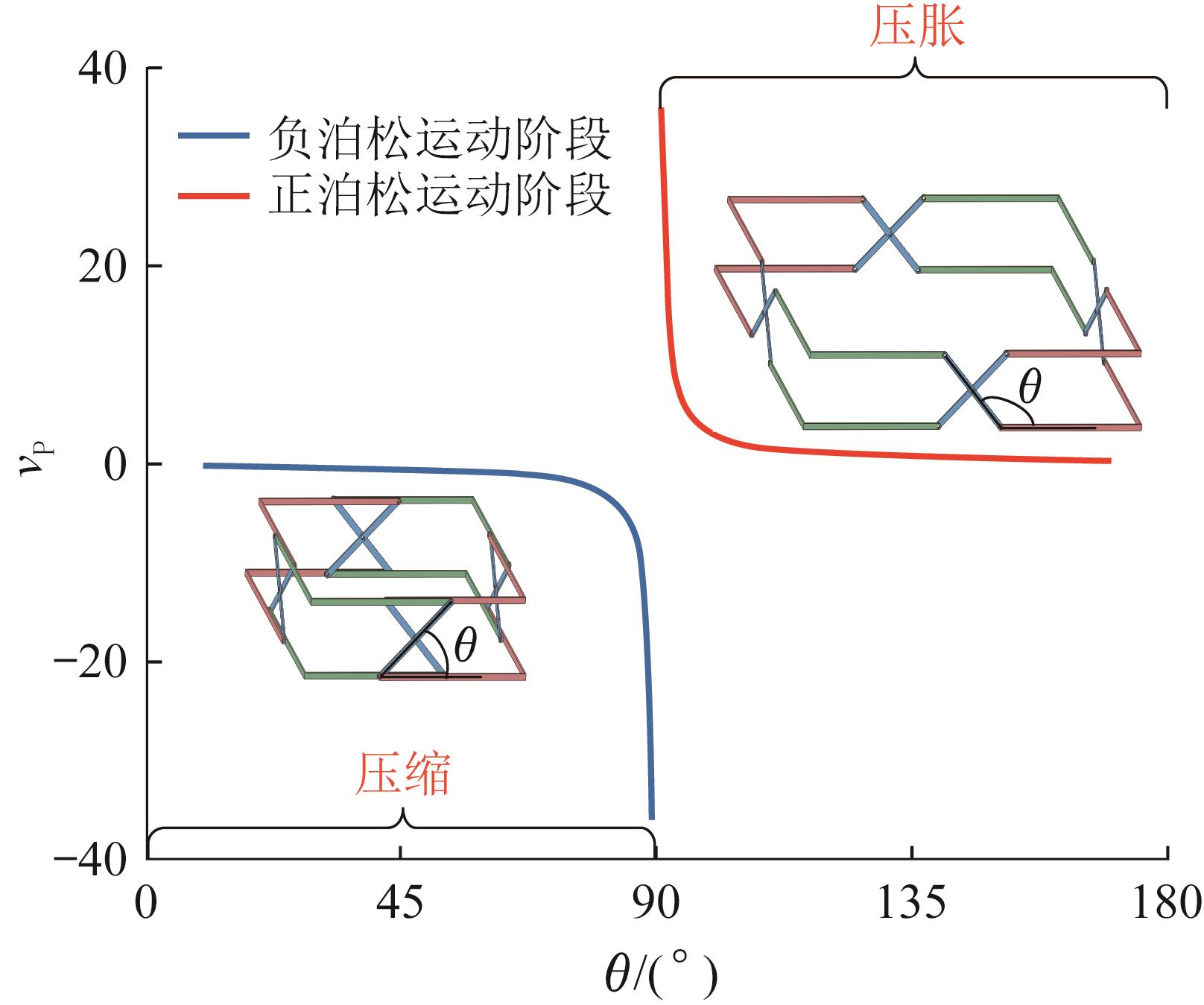
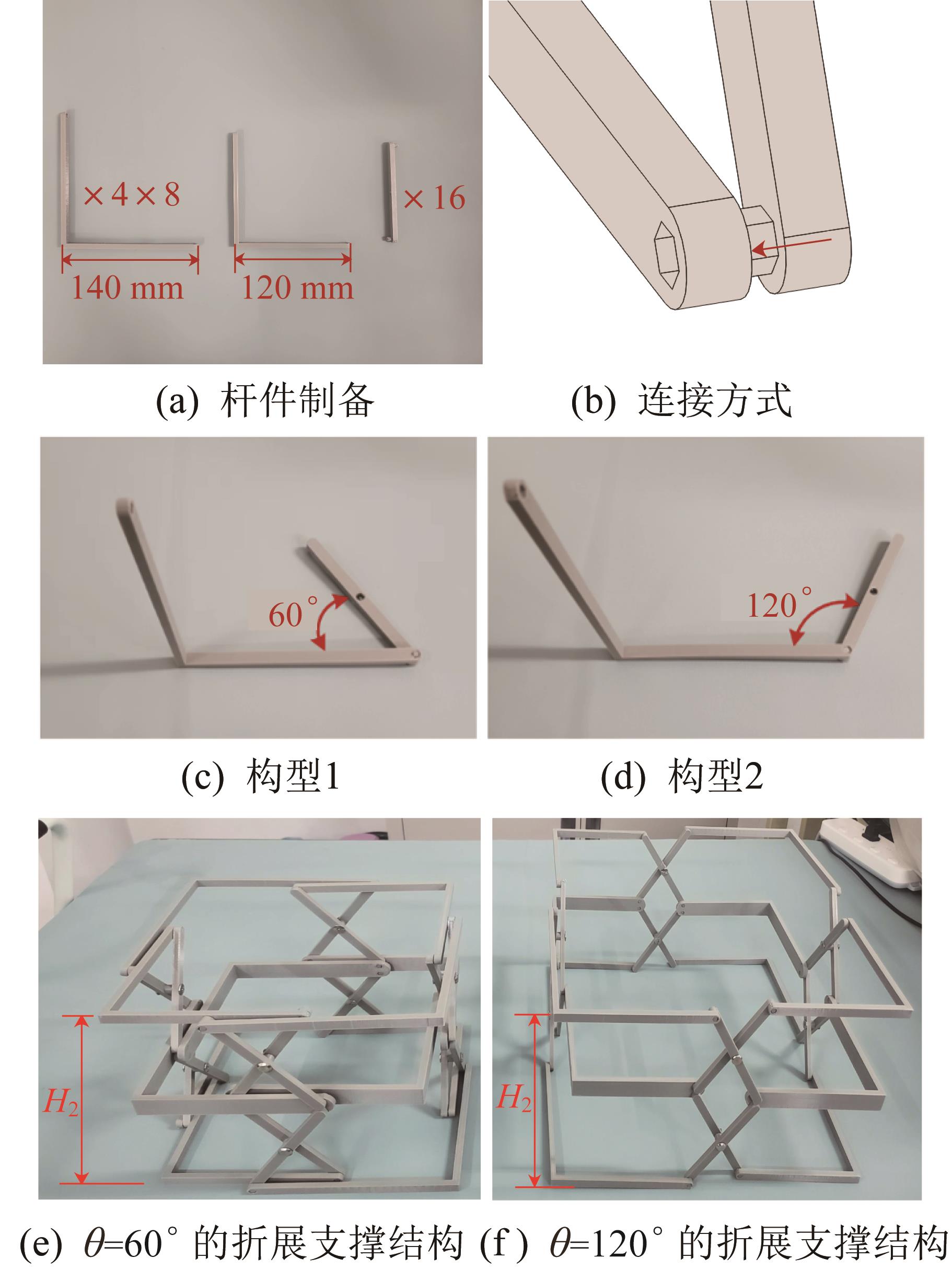
Abstract In order to improve the folding rate and support performance of deployable mechanisms, a scissor deployable mechanism with variable Poisson motion characteristics is proposed and its kinematics analysis is conducted. Firstly, a thick panel support unit with single-closed-loop was proposed and applied to sandwich structures. Through analyzing the influence of different shape sandwich layers on the support stiffness of sandwich structure by using ANSYS Workbench software, it was found that the sandwich structure with thick plate support unit had better support effect and smaller mass, and the positive and negative Poisson' ratio could be switched by changing the structural design parameters. Secondly, according to the definition of Poisson' ratio, a regular n-sided scissor deployable mechanism with variable Poisson motion characteristics was designed. Based on the screw theory, the screw constraint topology graph of the closed-loop deployable mechanism was drawn to analyze its degree of freedom as 1. The deployable mechanism was divided into three modules, and the principle and process of modular longitudinal expansion were described. Finally, the kinematics model of the m-layer regular n-sided scissor deployable mechanism was established and the prototype of the regular quadrilateral scissor deployable support structure was set up to further verify the variable Poisson motion characteristics of the mechanism, which could provide a theoretical basis for the follw-up research.
|
|
Received: 20 October 2023
Published: 04 March 2024
|
|
|
具有变泊松运动特性的剪叉式折展机构运动学分析
为提高折展机构的折展率和支撑性能,提出了一种具有变泊松运动特性的剪叉式折展机构并对其进行运动学分析。首先,提出了一种单闭环厚板支撑单元并将其应用于三明治结构,利用ANSYS Workbench软件分析不同形状夹芯层对三明治结构支撑刚度的影响,发现采用厚板支撑单元的三明治结构具有更好的支撑效果和更小的质量,且可通过改变结构设计参数来实现正负泊松比的切换。然后,根据泊松比的定义,设计了一种具有变泊松运动特性的正n边形剪叉式折展机构;基于螺旋理论,通过绘制闭环折展机构的旋量约束拓扑图分析得到其自由度为1,将折展机构分为3种模块并阐述了模块化纵向扩展的原理和过程。最后,建立了m层正n边形剪叉式折展机构的运动学模型并搭建了正四边形剪叉式折展支撑结构实物样机,进一步验证了机构的变泊松运动特性,这可为后续的研究提供理论基础。
关键词:
三明治结构,
剪叉式折展机构,
螺旋理论,
运动学分析
|
|
| [1] |
邓宗全.空间折展机构设计[M].哈尔滨:哈尔滨工业大学出版社,2013:1-3.
DENG Z Q. Design of space deployable and foldable mechanism[M]. Harbin: Harbin Institute of Technology Press, 2013: 1-3.
|
|
|
| [2] |
田大可,高海明,金路,等.模块化空间折展机构研究现状与展望[J].中国空间科学技术,2021,41(4):16-31.
TIAN D K, GAO H M, JIN L, et al. Research status and prospect of modular space deployable and foldable mechanism[J]. Chinese Space Science and Technology, 2021, 41(4): 16-31.
|
|
|
| [3] |
徐伟炜.集中荷载下固定铰支剪式可展桥梁结构分析与参数优化[J].东南大学学报(自然科学版),2022,52(6):1063-1070.
XU W W. Structural analysis and parameter optimization of fixed hinged scissor deployable bridges under point load[J]. Journal of Southeast University (Natural Science Edition), 2022, 52(6): 1063-1070.
|
|
|
| [4] |
TACHI T. Freeform rigid-foldable structure using bidirectionally flat-foldable planar quadrilateral mesh[M]. Vienna: Springer Vienna, 2010: 87-102.
|
|
|
| [5] |
唐愉真,刘超,肖洪,等.可展薄膜的Miura弹性折痕建模与分析[J].哈尔滨工业大学学报,2023,55(1):1-11. doi:10.11918/202203107
TANG Y Z, LIU C, XIAO H, et al. Modeling and analysis of Miura elastic creases for deployable membrane[J]. Journal of Harbin Institute of Technology, 2023, 55(1): 1-11.
doi: 10.11918/202203107
|
|
|
| [6] |
MA X F, LI T J, MA J Y, et al. Recent advances in space-deployable structures in China[J]. Engineering, 2022, 17(10): 207-219.
|
|
|
| [7] |
杨慧,冯健,刘永斌,等.百米级多超弹性铰链抛物柱面天线折展机构设计与运动学分析[J].机械工程学报,2022,58(3):75-83. doi:10.3901/jme.2022.03.075
YANG H, FENG J, LIU Y B, et al. Design and kinematic analysis of a large deployable mechanism of the parabolic cylindrical antenna with multi tape-spring hinges[J]. Journal of Mechanical Engineering, 2022, 58(3): 75-83.
doi: 10.3901/jme.2022.03.075
|
|
|
| [8] |
畅博彦,杨帅,金国光,等.基于直线驱动的空间可展机构运动分析[J].机械工程学报,2020,56(5):192-201. doi:10.3901/jme.2020.05.192
CHANG B Y, YANG S, JIN G G, et al. Motion analysis of spatial deployable mechanism driven in straight line[J]. Journal of Mechanical Engineering, 2020, 56(5): 192-201.
doi: 10.3901/jme.2020.05.192
|
|
|
| [9] |
畅博彦,徐鑫,梁栋,等.厚板三浦折展机构的几何设计与运动分析[J].中国空间科学技术,2022,42(4):146-157.
CHANG B Y, XU X, LIANG D, et al. Geometric design and motion analysis of Miura-Ori mechanism with thick panels[J]. Chinese Space Science and Technology, 2022, 42(4): 146-157.
|
|
|
| [10] |
杨名远,马家耀,李建民,等.基于厚板折纸理论的微创手术钳[J].机械工程学报,2018,54(17):36-45. doi:10.3901/jme.2018.17.036
YANG M Y, MA J Y, LI J M, et al. Thick-panel origami inspired forceps for minimally invasive surgery[J]. Journal of Mechanical Engineering, 2018, 54(17): 36-45.
doi: 10.3901/jme.2018.17.036
|
|
|
| [11] |
EDMONDSON B J, BOWEN L A, GRAMES C L, et al. Oriceps: origami-inspired forceps[C]//ASME 2013 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Snowbird, Utah, Sep. 16-18, 2013.
|
|
|
| [12] |
方虹斌,吴海平,刘作林,等.折纸结构和折纸超材料动力学研究进展[J].力学学报,2022,54(1):1-38. doi:10.6052/0459-1879-21-478
FANG H B, WU H P, LIU Z L, et al. Advances in the dynamics of origami structures and origami metamaterials[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(1): 1-38.
doi: 10.6052/0459-1879-21-478
|
|
|
| [13] |
YANG L, HARRYSSON O, WEST H, et al. Mechanical properties of 3D re-entrant honeycomb auxetic structures realized via additive manufacturing[J]. International Journal of Solids and Structures, 2015, 69: 475-490.
|
|
|
| [14] |
BABAEE S, SHIM J, WEAVER J C, et al. 3D soft metamaterials with negative Poisson's ratio[J]. Advanced Materials, 2013, 25(36): 5044-5049.
|
|
|
| [15] |
GRIMA J N, EVANS K E. Auxetic behavior from rotating squares[J]. Journal of Materials Science Letters, 2000, 19: 1563-1565.
|
|
|
| [16] |
WANG X L, QU H B, LI X, et al. Multi-triangles cylindrical origami and inspired metamaterials with tunable stiffness and stretchable robotic arm[J]. PNAS Nexus, 2023, 2(4): pgad098.
|
|
|
| [17] |
陈焱.基于机构运动的大变形超材料[J].机械工程学报,2020,56(19):2-13. doi:10.3901/jme.2020.19.002
CHEN Y. Review on kinematic metamaterials[J]. Journal of Mechanical Engineering, 2020, 56(19): 2-13.
doi: 10.3901/jme.2020.19.002
|
|
|
| [18] |
YASUDA H, YEIN T, TACHI T, et al. Folding behaviour of Tachi-Miura polyhedron bellows[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2013, 469(2159): 20130351.
|
|
|
| [19] |
FILIPOV E T, TACHI T, PAULINO G H. Origami tubes assembled into stiff, yet reconfigurable structures and metamaterials[J]. Proceedings of the National Academy of Sciences, 2015, 112(40): 12321-12326.
|
|
|
| [20] |
KAMRAVA S, MOUSANEZHAD D, EBRAHIMI H, et al. Origami-based cellular metamaterial with auxetic, bistable, and self-locking properties[J]. Scientific Reports, 2017, 7(1): 1-9.
|
|
|
| [21] |
FANG H, CHU S C A, XIA Y, et al. Programmable self-locking origami mechanical metamaterials[J]. Advanced Materials, 2018, 30(15): 1706311.
|
|
|
| [22] |
YASUDA H, YANG J. Reentrant origami-based metamaterials with negative Poisson's ratio and bistability[J]. Physical Review Letters, 2015, 114(18): 185502.
|
|
|
| [23] |
YANG Y F, YOU Z. A modular origami-inspired mechanical metamaterial[EB/OL]. (2020-12-17) [2023-10-20]. .
|
|
|
| [24] |
CHEN Y, LIANG J, SHI P, et al. Inverse design of programmable Poisson's ratio and in-plane stiffness for generalized four-fold origami[J]. Composite Structures, 2023, 311: 116789.
|
|
|
| [25] |
WANG H, ZHANG Y, LIN W, et al. A novel two-dimensional mechanical metamaterial with negative Poisson's ratio[J]. Computational Materials Science, 2020, 171: 109232.
|
|
|
| [26] |
TAYLOR M, FRANCESCONI L, BALDI A, et al. A novel auxetic structure with enhanced impact performance by means of periodic tessellation with variable Poisson's ratio[C]//Proceedings of the 2018 Annual Conference on Experimental and Applied Mechanics. Berlin: Springer International Publishing, 2019: 211-218.
|
|
|
| [27] |
FLEISCH M, THALHAMER A, MEIER G, et al. Asymmetric chiral and antichiral mechanical metamaterials with tunable Poisson's ratio[J]. APL Materials, 2022, 10(6): 061105.
|
|
|
| [28] |
PRATAPA P P, LIU K, PAULINO G H. Geometric mechanics of origami patterns exhibiting Poisson's ratio switch by breaking mountain and valley assignment[J]. Physical Review Letters, 2019, 122(15): 155501.
|
|
|
| [29] |
KHAN K A, AL-MANSOOR S, KHAN S Z, et al. Piezoelectric metamaterial with negative and zero Poisson's ratios[J]. Journal of Engineering Mechanics, 2019, 145(12): 04019101.
|
|
|
| [30] |
刘鸿文.材料力学[M].北京:高等教育出版社,2017:6-9. doi:10.1051/ncssc/201701045
LIU H W. Mechanics of materials[M]. Beijing: Higher Education Press, 2017: 6-9.
doi: 10.1051/ncssc/201701045
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|